
CPNT-Jade Framework
Developing Agent-based Control of Discrete Event Systems
Andrzej Bożek and Marian Wysocki
Department of Computer and Control Engineering, Rzeszow University of Technology,
al. Powstańców Warszawy 12, Rzeszów, Poland
Keywords: Multi-Agent Systems, Jade, CPN Tools, Colored Petri Nets, HTCPN.
Abstract: A framework built as a combination of CPN Tools software and JADE (Java Agent DEvelopment Frame-
work) platform has been proposed. CPN Tools makes it possible to model a controlled system with the use
of hierarchical timed colored Petri nets (HTCPN), a powerful formalism for modeling complex discrete
event systems. The framework supports real-time mode of simulation of the target system model. Issues of
communication and time synchronization between the two software components are transparent to a user.
An example of the framework use has been presented. It refers to a dynamic flexible job shop manufactur-
ing system for which an agent-based control has been developed.
1 INTRODUCTION
Multi-agent systems represent important kind of
intelligent software architecture characterized by
distributed implementation, mobility and scalability.
A multi-agent control system consists of controlled
(sub)system, e.g. a business process, a factory plant,
road traffic, etc., and an agent-based software
(sub)system (Candido and Barata, 2007). A devel-
opment phase is needed for every software system.
In this stage new features are added and tested.
Therefore, a connection between the developed con-
trol system and the controlled system, real or simu-
lated, is required.
The presented solution refers to the scenario
where a computational model of the controlled sys-
tem is used. There exist many formalisms and soft-
ware tools for simulation of continuous or discrete
dynamic systems. In this work the discrete event
systems are the focus of interest. Petri net formalism
with high-level extensions has been selected for the
framework implementation as the powerful tool for
modeling and simulation of discrete event systems.
The framework has been composed of two parts.
The first part simulates discrete system with the use
of a Petri net executable model. The second part is a
multi-agent system that performs a control algo-
rithm. The framework provides transparent bidirec-
tional communication between the two subsystems.
The discrete system model and the multi-agent con-
trol system are built during the development phase.
After that, the developed agent-based control system
is ready to be reconnected to a real-world target
environment.
An exemplary solution based on the framework
has also been presented in this work. It refers to a
control of production process in a screw factory that
has a form of a dynamic flexible job shop problem.
2 RELATED WORK
Many frameworks and generalized architectures
related to multi-agent systems have been proposed.
There exist multi-agent frameworks dedicated for
specific domains. Albashiri and Coenen (2009) have
proposed EMADS framework (Extensible Multi-
Agent Data Mining System). Vokřínek, Komenda
and Pěchouček (2011) have developed abstract ar-
chitecture of a task-oriented multi-agent problem
solver. MABC (Multi-Agent Based Clustering)
framework has been developed by Chaimontree,
Atkinson and Coenen (2011). Hu, Du and Spencer
(2011) have developed Aframe framework for Am-
bient Systems. An agent-based framework that sup-
ports implementation of IPPS system (Integrated
Process Planning and Scheduling) has been pro-
posed by Li, Zhang, Gao, Li and Shao (2010). FAST
(Flexible and Adaptive Scheduling Tool) is a toolkit
184
Bo
˙
zek A. and Wysocki M..
CPNT-Jade Framework - Developing Agent-based Control of Discrete Event Systems.
DOI: 10.5220/0004218001840189
In Proceedings of the 5th International Conference on Agents and Artificial Intelligence (ICAART-2013), pages 184-189
ISBN: 978-989-8565-38-9
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

that provides a powerful agent-based framework to
develop flexible, fault tolerant and scalable schedul-
ing systems (Garcia, Valero, Argente, Giret and Julian,
2008). Liu, Abdelrahman and Ramaswamy (2007)
have proposed a multi-agent framework for robust
and adaptable dynamic job shop scheduling. Using
of multi-agent solution in manufacturing process
planning, scheduling and control has become more
and more common recently. The work of Shen,
Wang and Hao (2006) is the good state-of-the-art
survey on this subject.
The Petri net formalism is also used for devel-
opment of multi-agent systems. Miranda and
Perkusich (1999) have presented the modeling, anal-
ysis and verification of MATHEMA multi-agent
system by means of colored Petri nets. Weyns and
Holvoet (2002) have proposed using colored Petri
net for modeling and analysis of an entire multi-
agent system. They have chosen Design/CPN (pre-
decessor of CPN Tools) software and Packet-World
as a case study. The same authors (Weyns and Hol-
voet, 2004) have developed a colored Petri net dedi-
cated for regional synchronization in a multi-agent
system.
The common feature of the three aforementioned
works is that the Petri net formalism has been used
for modeling and analysis of multi-agent systems. In
this work the Petri net formalism has been used for
modeling and simulation of an external environment
of the multi-agent system that substitutes a target
environment during the development phase and does
not need to be implemented as a multi-agent struc-
ture.
3 FRAMEWORK
ARCHITECTURE
3.1 Components of the Framework
The framework is based on two software packages.
The first one is CPN Tools (CPN Tools Home Page,
2012), the environment for modeling, simulation,
analysis and verification of discrete event systems
with the use of hierarchical timed colored Petri nets
(HTCPN) formalism (Jensen and Kristensen, 2009).
The most important reasons of this selection are:
Petri nets are convenient formalism for struc-
tural representation of typical features and be-
haviors of discrete event systems, e.g. concur-
rency, synchronization, resources sharing, mu-
tual exclusion.
The high-level extensions are very useful. The
hierarchy allows to decompose a structure of a
modeled system into nested modules. Colored
tokens carry information that can be repre-
sented by complex data types and can be pro-
cessed by arc expressions. The time extension
allows to model time relations between dis-
crete events.
The second package is JADE (JADE Home
Page, 2012). The most important reasons of JADE
platform selection are:
Java is classified as one of the most portable
programming languages. A multi-agent sys-
tem can be developed on one platform and
then can be moved to another target platform.
The paradigm of agents mobility is also well
supported by the Java language portability.
JADE is compliant with FIPA (The Foundation
for Intelligent Physical Agents) (FIPA Home
Page, 2012) specifications and supplies im-
plementations of standards defined by this
specifications.
Both of the software packages are free and open
source. Because of the names CPN Tools and JADE,
the proposed framework has been named as CPNT-
JADE framework.
3.2 Framework Structure
The framework structure is presented in Figure 1.
Both Petri net structure components and multi-agent
system components are divided into two sets, name-
ly framework components and solution components.
Framework components constitute the base part of
the framework that cannot be changed. The solution
components are project-related elements.
CPN Tools and JADE are connected by TCP/IP.
Information frames exchanged between applications
have simple but usable form of list of messages.
Each message is a pair (address, data). On
JADE side, there are five agents that have been pre-
defined for CPNT-JADE framework. The agents are
described in Table 1. A developer that uses the
framework has to implement class of Configurator
agent and class of DispatchingPolicy object. Dis-
patchingPolicy object defines how to translate each
message received from CPN Tools into an instance
of FIPA compliant ACLMessage routed to other
agents and vice versa.
The framework supports the real-time mode of
simulation of a target system model. This mode is
provided by Real-time Mode Subsystem. In the real-
CPNT-JadeFramework-DevelopingAgent-basedControlofDiscreteEventSystems
185
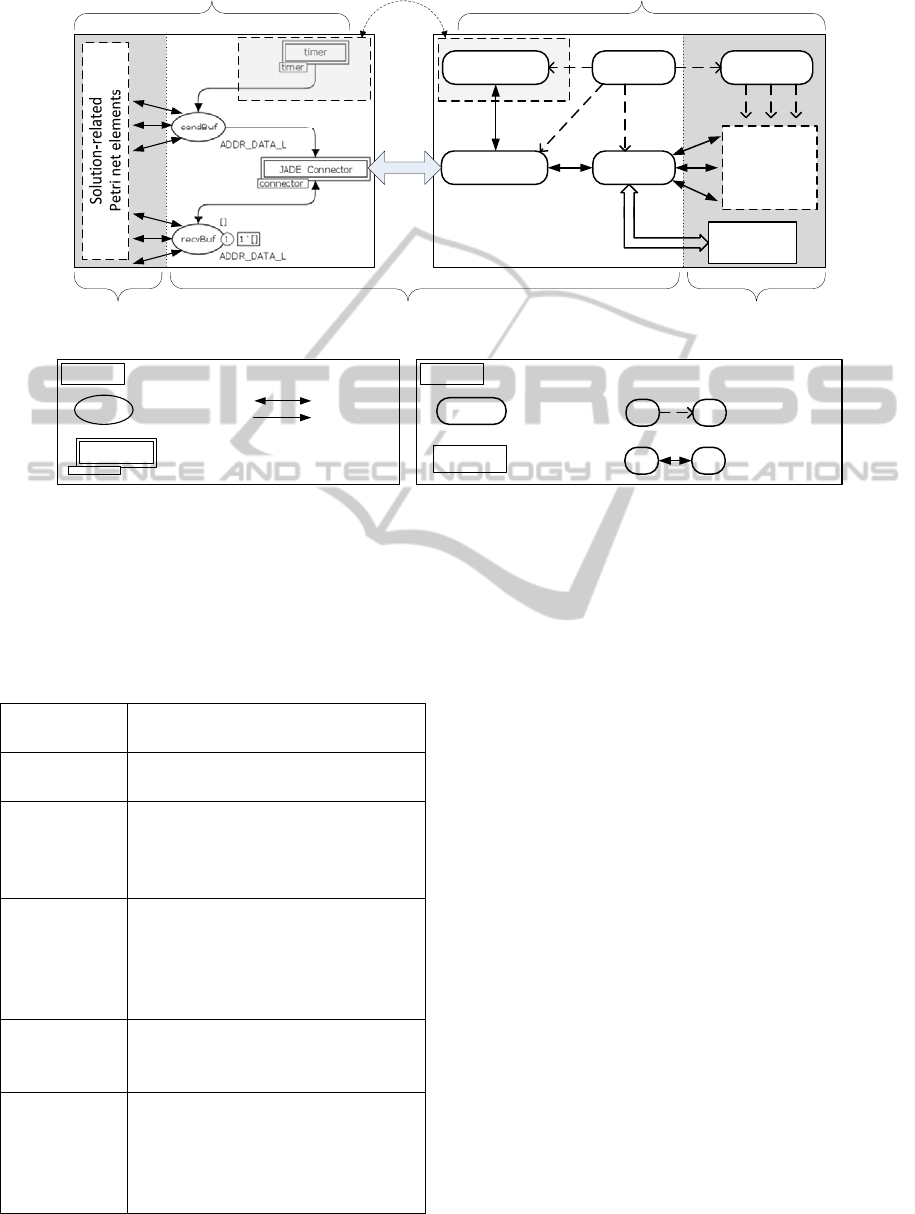
Figure 1: The structure of the CPNT-JADE framework.
time mode timestamps of HTCPN model are
mapped into real time intervals. Thus, model param-
eters include data that defines locations and relations
of events in real time axis.
Table 1: The predefined agents of the CPNT-JADE
framework.
Agent class
name
Description
Initiator
Created by JADE. It is responsible for
creation other predefined agents.
Cpnt-
Connector
Performs low-level TCP/IP communica-
tion with CPN Tools and translates data
between low-level frames and high-
level messages.
Message-
Dispatcher
Redirects messages between CpntCon-
nector and other agents. Routes are
defined on the basis of messages ad-
dresses and rules defined by Dispatch-
ingPolicy object.
Time-
Synchronizer
Optional, needed if the framework runs
in the real-time mode. Details are given
in subsection 3.3.
Configurator
Created by the framework but its behav-
ior is solution-specific and has to be
defined by a user. This agent creates
and administers all solution-related
parts of the multi-agent system.
4 EXAMPLE – DEVELOPING
A PRODUCTION CONTROL
SYSTEM
4.1 Problem Formulation
As an example solution, a prototypical production
control system is presented. Organization of shop-
floor level production in the factory can be classified
as a kind of dynamic flexible job shop manufactur-
ing system (Rajabinasab and Mansour, 2011), with
detailed characteristics as follows:
Jobs arrive continuously in time. No parameters
of a job are known until it arrives.
Arrival (release) date r
k
and due date d
k
are de-
fined for each job J
k
.
A non-empty sequence of operations (O
1,k
, O
2,k
,
..., O
o(k),k
) is defined for each job J
k
.
A non-empty set of machines {M
1,i,k
, M
2,i,k
, ...,
M
m(i,k),i,k
} is defined for each operation O
i,k
,
any machine can alternatively execute the op-
eration.
A processing time p
m,i,k
is defined for each pair
machine-operation O
m,i,k
.
Each machine can perform at most one opera-
tion at a time.
CpntConnector
Message-
Dispatcher
Dispatching-
Policy
Time-
Synchronizer
Initiator
TCP/IP
Configurator
Solution-
related
agents
Framework ComponentsSolution
Components
Solution
Components
Petri Net Structure (CPN Tools) Multi-agent System (JADE)
Real-time Mode
Subsystem
Legend
X Y
X Y
Legend
Petri Net Place
Petri Net
Substitution
Transition
Petri Net Arc
or
Agent
Agent X
Communicates
with Agent Y
Agent X
Creates Agent Y
Java Object
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
186
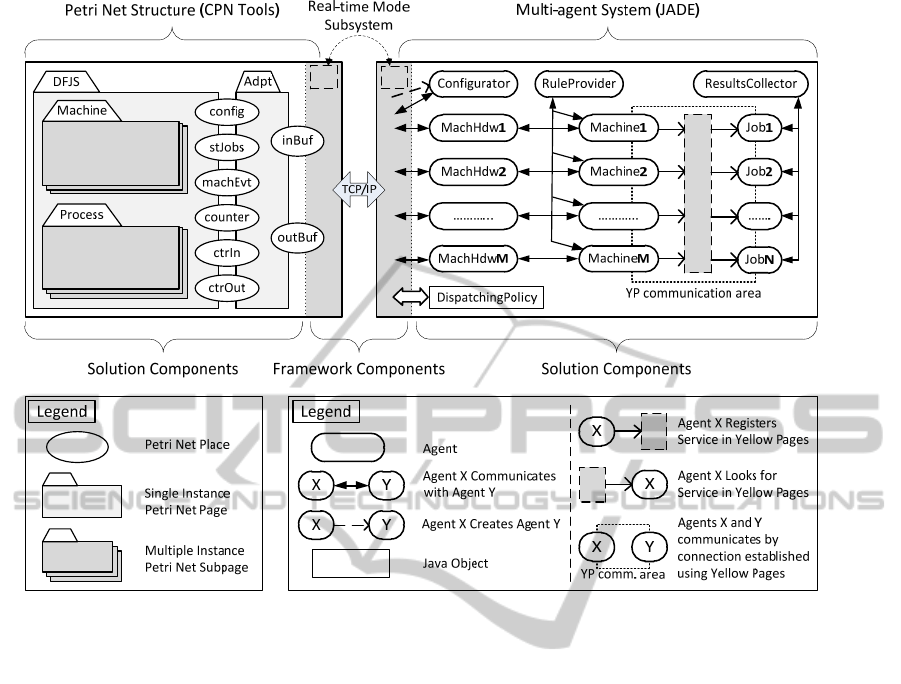
Figure 2: The structure of the prototypical dynamic production scheduling system.
The production in the screw factory is partially
automated. Machines are equipped with embedded
PC controllers (Żabiński and Mączka, 2012). These
controllers are connected in a network and each one
can be a base for a container of a multi-agent plat-
form.
4.2 HTCPN Plant Model
The structure of the prototype production control
system is presented in Figure 2. The left part repre-
sents a Petri net plant model based on the HTCPN
formalism. The model consists of four pages (sub-
structures): Adpt (JADE Adapter), DFJS (Dynamic
Flexible Job Shop), Machine, Process. DFJS is the
main page of the model. It models dynamic flexible
job shop system structure on high-level. The Ma-
chine subpage represents features of a real machine
important for the prototyped solution. Its implemen-
tation is presented in Figure 3. The modelled proper-
ties are as follows:
Progress of operations is simulated (place coun-
ter).
A machine can be stopped over arbitrarily de-
fined time intervals (place brkdwns).
Start/stop/breakdown events are registered
(place machEvt).
The multi-agent subsystem can control a queue
of processed operations (place ctrIn).
In the real production environment PLC control-
lers have a connection with item counters and the
progress is delimited by comparison of the numbers
of produced and planned items. PLC controllers also
register start/stop/breakdown events in the system.
4.3 Agent-based Control System
The agent-based control system is presented in the
right part of Figure 2. Configurator agent creates all
other solution-related agents, but this is not shown in
Figure 2 to keep it readable.
There are M MachHdw (Machine Hardware) and
Machine agents in the system, one pair of the agents
for each machine. There are N Job agents in the
system, where N is the number of currently pro-
cessed jobs. The control is performed by choosing
one operation in advance for each machine.
Selecting of operations for processing is main
behavior of the Machine agent. When a discrete state
of the production system changes, i.e. a new job
Yellow Pages
YP
YP
CPNT-JadeFramework-DevelopingAgent-basedControlofDiscreteEventSystems
187
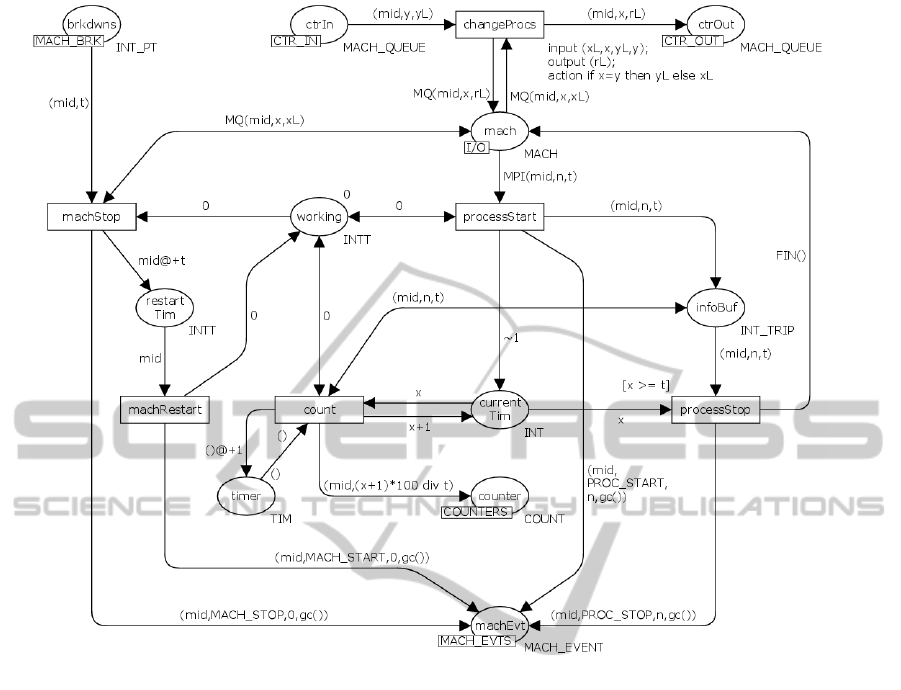
Figure 3: The machine subpage of the HTCPN model of the production system.
arrives or some operation finishes, a special message
is broadcasted to all Machine agents. After receiving
this message, each Machine agent checks whether it
needs to reserve a next operation for processing. If
so, the agent starts the JobSelection interaction pro-
tocol.
The sequence diagram of this protocol is pre-
sented in Figure 4. The JobSelection protocol has
been patterned after FIPA-CNIP (contract net inter-
action protocol) (FIPA Home Page, 2012). A sched-
uling decision is made by Machine agent after re-
ceiving operationParameters messages from all
asked Job agents. The parameters represent expected
start and stop times of waiting operations. The Ma-
chine agent compares parameters of waiting opera-
tions and selects at most one operation. The
RuleProvider agent stores selection criteria. For
tests, several typical scheduling dispatching rules
have been implemented: first-come first-served
(FCFS), earliest arrival date (EAD), earliest due date
(EDD) and critical ratio (CR - ratio of the remaining
processing time to the allowance time of a job).
When a machine breaks down, an operation re-
served for this machine is removed from the pro-
cessing queue and marked as unreserved by related
Job agent. Thus, it is possible that the operation will
be reserved and processed by other machine. It is a
form of automatic rescheduling.
5 CONCLUSIONS
The main goal of the presented work is to propose a
solution that can be helpful in developing agent-
based control systems designed for real-world appli-
cations. A user of the framework should at first build
a model of a controlled system using HTCPN for-
malism. Then, the user can develop a multi-agent
control system with the use of JADE. When the
control system is fully ready or safe enough it can be
excluded from the framework and moved to a target
environment.
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
188
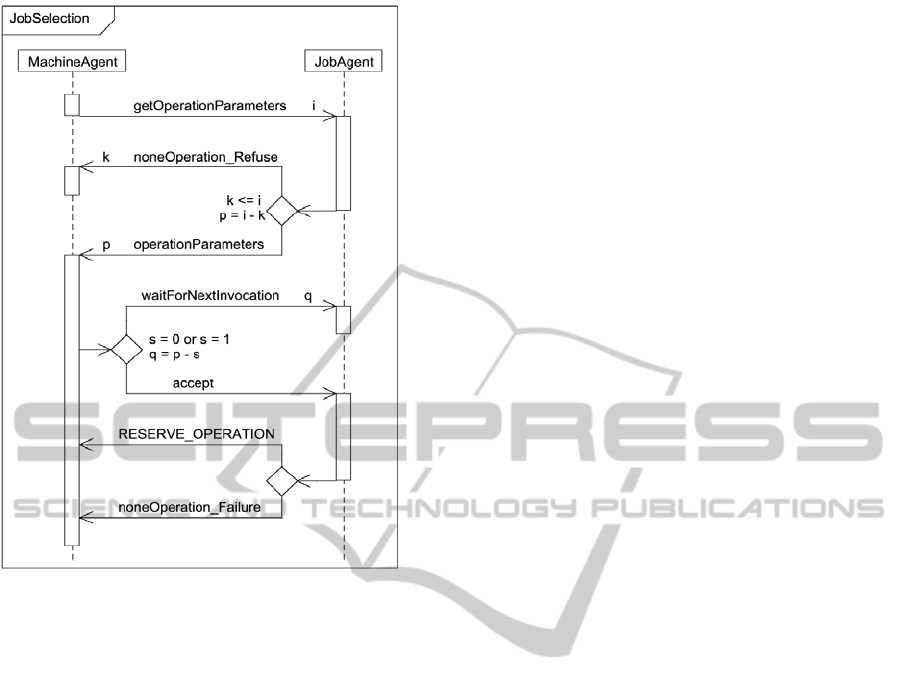
Figure 4: The sequence diagram of the JobSelection inter-
action protocol.
The prototypical agent-based control system,
presented as an example, is a subject of continuous
development and improvement. The HTCPN model
is intended to be augmented with additional features,
as representation of setup and transport times, limi-
tation of resources, etc. New functionalities are go-
ing to be added to the control system, among other
things, a possibility of interactive changing of opera-
tion sequences by machine operators, scheduling
many operations in advance for each machine, coop-
eration with a long-term planner.
The work has been supported by the program of
the Polish Ministry of Science and Higher Education
for young scientists (U-8603/DS/M).
REFERENCES
Albashiri, K., A., Coenen, F. (2009). A Generic and Ex-
tensible Multi-Agent Data Mining Framework. Hybrid
Artificial Intelligence Systems. LNCS, 5572, 203-210.
Candido, G., Barata, J. (2007). A Multiagent Control
System for Floor Assembly. HoloMAS 2007, 4659(9-
12), 293-302.
Chaimontree, S., Atkinson, K., Coenen, F. (2011). A
framework for Multi-Agent Based Clustering. Auton
Agent Multi-Agent Syst, 25(3), 425-446.
CPN Tools Home Page (2012). Retrieved November 5,
2012, from http://cpntools.org
Miranda, M., C., Perkusich, A. (1999). Modeling and
Analysis of a Multi-Agent System using Colored Petri
Nets, Workshop on Applications of Petri Nets to Intel-
ligent System Development. Williamsburg.
FIPA Home Page (2012). Retrieved November 5, 2012,
from http://www.fipa.org
Garcia, M., E., Valero, S., Argente, E., Giret, A., Julian, V.
(2008). A FAST Method to Achieve Flexible Production
Programming Systems. IEEE Trans. Syst. Man Cybern.
C, Appl. Rev., 38(2), 242-252.
Hu, X., Du, W., Spencer, B. (2011). A Multi-Agent
Framework for Ambient Systems Development. The
2nd International Conference on Ambient Systems,
Networks and Technologies. Procedia Computer Sci-
ence, 5, 82-89.
JADE Home Page (2012). Retrieved November 5, 2012,
from http://jade.tilab.com
Jensen, K., Kristensen, L.M. (2009). Coloured Petri Nets.
Modelling and Validation of Concurrent Systems. Ber-
lin: Springer.
Li, X., Zhang, Ch., Gao, L., Li, W., Shao, X. (2010). An
agent-based approach for integrated process planning
and scheduling. Experts Systems with Applications,
37(2), 1256-1264.
Liu, N., Abdelrahman, M., A., Ramaswamy, S. (2007). A
Complete Multiagent Framework for Robust and
Adaptable Dynamic Job Shop Scheduling. IEEE
Trans. Syst. Man Cybern. C, Appl. Rev., 37(5), 904-
916.
Rajabinasab, A., Mansour S. (2011). Dynamic flexible job
shop scheduling with alternative process plans: an
agent-based approach. Int. J. Adv. Manuf. Technol. 54,
1091-1107.
Shen, W., Wang, L., Hao, Q. (2006). Agent-Based Dis-
tributed Manufacturing Process Planning and Schedul-
ing: A State-of-the-Art Survey. IEEE Trans. Syst. Man
Cybern. C, Appl. Rev., 36(4), 563-577
Vokřínek, J., Komenda, A., Pěchouček, M. (2011). Ab-
stract Architecture of Task-oriented Multi-agent Prob-
lem Solving. IEEE Trans. Syst. Man Cybern. C, Appl.
Rev., 41(1), 31-41.
Weyns, D., Holvoet, T. (2002). A Colored Petri Net for a
Multi-Agent Application. Second Workshop on Mod-
elling of Components, Objects and Agents, MOCA’02.
Aarhus.
Weyns, D., Holvoet, T. (2004). A Colored Petri Net for
Regional Synchronization in Situated Multi-Agent
Systems. Proceedings of First International Workshop
on Petri Nets and Coordination. Bologna.
Żabiński, T., Mączka, T. (2012). Implementation of Hu-
man-System Interface for Manufacturing Organiza-
tions. Advances in Intelligent and Soft Computing, 98,
13-31.
CPNT-JadeFramework-DevelopingAgent-basedControlofDiscreteEventSystems
189
