
Enhancing Attentive Task Search with Information Gain Trees
and Failure Detection Strategies
Kristin Stamm
1,2
and Andreas Dengel
1,2
1
German Reseach Center for Artificial Intelligence, Trippstadter Str. 122, Kaiserslautern, Germany
2
Department of Computer Science, University Kaiserslautern, Kaiserslautern, Germany
Keywords:
Machine Learning, Enterprise Applications, Evidence based Search, Information Gain Tree, Search Failure
Detection, Degree of Belief, Dempster Shafer Theory, Multichannel Document Analysis.
Abstract:
Enterprises today are challenged by managing requests arriving through all communication channels. To
support service employees in better and faster understanding incoming documents, we developed the approach
of process-driven document analysis (DA). We introduced the structure Attentive Task (AT) to formalize
information expectations toward an incoming document. To map the documents to the corresponding AT, we
previously developed a novel search approach that uses DA results as evidences for prioritizing all AT. With
this approach, we consider numerous task instances including their context instead of a few process classes.
The application of AT search in enterprises raises two challenges: (1) Complex domains require a structured
selection of well performing evidence types, (2) a failure detection method is needed for handling a substantial
part of incoming documents that cannot be related to any AT. Here, we apply methods from machine learning
to meet these requirements. We learn and apply information gain trees for structuring and optimizing evidence
selection. We propose five strategies for detecting documents without ATs. We evaluate the suggested methods
with two processes of a financial institution.
1 INTRODUCTION
Today, enterprises are truly challenged by the man-
agement of new communication channels, such as
email, having to deal with information overload. Ac-
cording to Bellotti et al., the quantity and the com-
plexity of incoming requests can explain this over-
load (Bellotti et al., 2005). Enterprises strive toward
managing the multichannel complexity, but fail when
relying on existing IT solutions. The systems of-
ten suffer from the fragmentation between commu-
nication channels and also from the lack of connec-
tion to internal processes leading to information gaps.
Mostly, their functionality is limited to legal require-
ments only. Instead, users need a system that helps
them understanding the request, finding the related
process instance and extracting relevant information.
We proposed the approach of process-driven doc-
ument analysis (DA) (Stamm and Dengel, 2012a).
A document arriving through an input channel is
mapped to the corresponding process instance or task.
The information expectations of the process instance
are then used for conducting an analysis of the docu-
ment and for extracting all relevant information. We
applied two concepts: (1) Attentive Tasks (ATs) for-
mally describing information expectations toward in-
coming documents and (2) the Specialist Board (SB),
first introduced by (Dengel and Hinkelmann, 1996),
describing all available DA methods. First, we gener-
ate a DA plan. Second, we extract information about
the document according to the DA plan. Finally, we
search the corresponding AT based on this informa-
tion. If necessary, the DA plan is adopted according to
the AT. All steps are repeated until the matching AT
is found and no more information can be extracted.
In this paper, we focus on improving the novel AT
search algorithm that enables mapping on a task in-
stance level. In (Stamm and Dengel, 2012b), we use
DA results as evidences for prioritizing the available
AT set by calculating a degree of belief (DoB) for
each AT and evidence before combining them with
Dempster-Shafer theory (Shafer, 1976). First evalua-
tions demonstrated promising search results and good
robustness, but also that the selection of initial evi-
dences is crucial to search performance. Applying our
approach to enterprises raises two challenges: (1) We
believe that the introduced two step evidence structure
remains insufficient for domains with more evidence
81
Stamm K. and Dengel A..
Enhancing Attentive Task Search with Information Gain Trees and Failure Detection Strategies.
DOI: 10.5220/0004227300810090
In Proceedings of the 5th International Conference on Agents and Artificial Intelligence (ICAART-2013), pages 81-90
ISBN: 978-989-8565-39-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

types. Learning a more sophisticated structure is nec-
essary. (2) The approach fails when no AT fits the
document which is either the case when a new pro-
cess is triggered by an incoming document, or when
the mechanism of generating ATs failed due to pro-
cessing errors. A failure detection method is needed.
Our goal is to address these enterprise require-
ments by enhancing AT search with methods from
machine learning: (I) Learning evidence type trees by
maximizing the average information gain, (II) using
strategies for detecting search failure: (i) identifying
evidences that appear only in documents leading to
a new AT, (ii) comparing the maximum DoB to an
expected DoB, (iii) and introducing general AT tem-
plates, (iv) as well as hybrid combinations from the
previous strategies. We evaluate all approaches on a
corpus from a financial institution.
Next, we review related work. We give a brief
overview on our approach of process-driven DA fo-
cusing on the concept of ATs and the search algo-
rithm. We then introduce our two approaches and
present the results of their evaluations. Finally, we
draw conclusions and give an outlook on future work.
2 RELATED WORK
There exist many approaches for mapping documents
to processes or tasks - especially in the email envi-
ronment, but they all have numerous drawbacks mak-
ing them insufficient to our problem. They consider
usually a few processes and ignore important pro-
cess context information instead of numerous task
instances. They are often costly to transfer to new
domains, and they do not respect the importance of
search criteria or search failure.
Some approaches rely on heuristics for mapping
documents to tasks, e.g., thrasks that are a combina-
tion of conversation threads and tasks (Bellotti et al.,
2005) or other context information for aggregation
(Katz and Berman, 2011). They assume a direct
connection between heuristic and task. Other ap-
proaches use established classification methods, like
Na
¨
ıve Bayes or Support Vector Machines. For ex-
ample, Cohen et al. classify emails into sender in-
tentions based on verb-noun pairs called speech acts
(Cohen et al., 2004) as well as Scerri et al. who
apply rule based task classification with speech acts
(Scerri et al., 2010). Dredze et al. combine classifi-
cation methods that rely on involved people or top-
ics (Dredze et al., 2006). Faulring et al. propose
a regular logistic regression algorithm for task type
classification (Faulring et al., 2010), whereas Gran-
itzer et al. pursue to aggregate tasks from user in-
Input Channels
Processes
@ eDoc FAX
Focus
Knowledge
Document Analysis Planner
DA Plan
Document Analysis Execution
Evidences List of ATs
Attentive Tasks (AT)
Attentive Task Search
…
…
1 2 3
…
• Evidence perfor-
mance
• Specialist Board
• Customers
• Contracts
• …
…
Figure 1: Process-driven document analysis system.
teraction behavior (Granitzer et al., 2009). Unfortu-
nately, all these approaches do not involve a dynamic
task set and are, therefore, not applicable to Atten-
tive Tasks (ATs). Kr
¨
amer recognizes the importance
of tasks instances but uses manual task assignment
(Kr
¨
amer, 2010). Only Kushmerick and Lau use unsu-
pervised learning for deriving process structures from
emails. Their approach is applicable to personal email
management with unstructured and implicit processes
(Kushmerick and Lau, 2005). However, their ap-
proach has a limited applicability for well-defined
processes as they appear in enterprises. Overall, none
of the existing approaches consider search criteria, as
for example, results from DA, or provide handling of
search failure.
3 OVERALL APPROACH
This section presents the process-driven document
analysis (DA) approach focusing on Attentive Task
(AT) search (Stamm and Dengel, 2012a; Stamm and
Dengel, 2012b). We detail concept, AT terminology
and generation. We conclude with the main chal-
lenges from enterprise application.
3.1 Process-driven Document Analysis
The basic elements of the process-driven DA system
are depicted in Figure 1. The system deals with doc-
uments coming from the main input channels in en-
terprises: email, mail, fax, call center, and eDocs.
The system’s core consists of the DA planner, the DA
executor, and an AT search module. The system it-
eratively analyzes the document according to a plan
and searches for the corresponding AT in the available
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
82
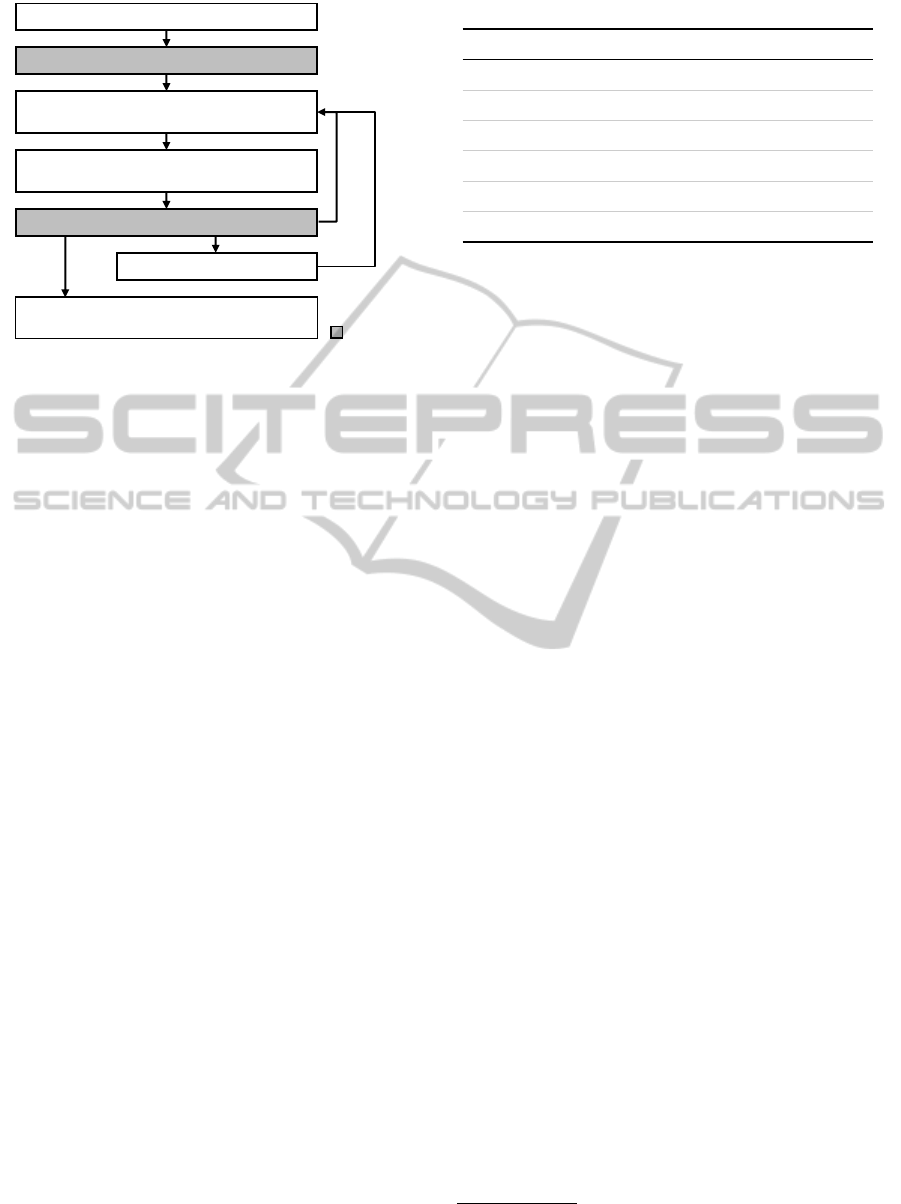
1. Document doc arrives. Set time step t=0
2. Generate list of initial evidence types eTypes
3. Generate/adopt initial s
i
, goal state s
g
and DA
plan plan with methods from Specialist Board
4. Execute DA plan and generate evidences evids
from document annotations
5. Perform AT search with evidences on AT set ats
7. Fill DA results in AT and send back to internal
process instance
6. Generate new AT from template
No new
ats and
evids
AT missing
AT
available
t++
Focus
Figure 2: Main steps of the process-driven document anal-
ysis algorithm.
AT set. The modules use knowledge about evidence
types, available DA methods described in the Special-
ist Board (SB), and enterprise knowledge. This work
focuses on AT search and the use of initial evidences.
The main steps of the algorithm are outlined in
Figure 2. When a document arrives, the system needs
to decide which evidences have to be extracted ini-
tially. Based on these evidence types, it generates the
initial state, the current goal state, and a DA plan.
This plan is then executed and DA results are cre-
ated in form of annotations. An annotation contains
at least a type, value, and reference to the text se-
quence. Annotations are used as evidences for per-
forming priority search on the set of available ATs. If
there is a fitting AT and more information needs to be
extracted, the system adopts the goal state, the initial
state, and the DA plan before proceeding. If the AT
is detected as missing, the corresponding AT template
is identified for generating a new AT and adopting the
goal. The algorithm stops when no more information
is necessary or available.
3.2 Attentive Tasks
In the following, we detail the formalism of the AT,
the AT generation options, and the AT search algo-
rithm, as well as the challenges in enterprises.
3.2.1 Terminology
An Attentive Task (AT) describes a process instance’s
information expectations toward an incoming docu-
ment at one step. The information expectations are
represented by a list of slots, where each slot con-
tains a descriptor, a value, and an information type, as
well as constraints – in case the value is not available.
Table 1: Example of an Attentive Task.
Descriptor Value Type Constraints
SenderEmail anna@blue.org EmailAddress in(customer.email)
SenderName Anna Blue Person in(customer.name)
RequestClass ChangeOfOwner Class in(requestClasses)
NewOwnerName Klaus Mustermann Person -
NewOwnerDoB ? Date DD.MM.YYYY
AdmissionOffice ? Organization in(organizations)
?: New value expected
Table 1 depicts an example of an AT for a change
of contract owner request. It contains information
known from previous steps of the process, e.g., cus-
tomer name. Additionally, there is new information
expected, e.g., about the owner’s date of birth.
An AT template contains no process instance in-
formation and is used for generating ATs.
3.2.2 Generating Attentive Tasks
Since ATs formalize the information expectations of
internal processes, they need to be generated by them.
For example, a service employee processes a cus-
tomer request, sends out a request, asking for miss-
ing information, and waits for reply. At this point, an
AT is generated, i.e., the correct AT template is filled
with known and expected information of the process
instance. The AT is added to the pool of active ATs.
Depending on the enterprise’s IT infrastructure,
there are several options for triggering AT generation:
Manual Generation. The user decides himself to
generate a new AT. He manually selects the tem-
plate, fills in all information, and stores the AT on
the server. This option requires high manual effort
and might result in a high error rate.
Full Automatic Generation. The ideal generation
of an AT is driven by an underlying system. This
can be a workflow, an ERP
1
, or any other sys-
tem. Depending on the size and type of the system
(e.g., standard software or self-tailored solutions)
this option requires expensive customization. It is
recommended to use existing APIs
2
of these sys-
tems for keeping adaptation effort low.
Supported Generation. An AT generation software
supports the user in generating new ATs. It op-
erates on the user’s computer and communicates
with a central system. Whenever the user needs
to generate a new AT, he uses the system with a
few selections. Due to system independence, this
1
ERP = Enterprise Resource Planning
2
API = Application Interface
EnhancingAttentiveTaskSearchwithInformationGainTreesandFailureDetectionStrategies
83
option is less cost intense but also less convenient
than the full automatic generation.
Depending on each process and its underlying sys-
tems, the generation method can be a mixture of them.
A complete set of ATs requires full process knowl-
edge and perfect generation of ATs either by employ-
ees or by the systems. Each of these factors can fail
resulting in an incomplete set of ATs.
3.2.3 Attentive Task Search
In our previous work, we proposed and evaluated Al-
gorithm 1. It performs the prioritization of a set of
ATs using DA results as evidences. Each evidence
contains a descriptor d and a value v. The algorithm
has an expected runtime of O(n
2
).
Algorithm 1: Search Attentive Tasks atList given evidences
evidList (Stamm and Dengel, 2012b).
function ATSEARCH(atList,evidList)
for all e in evidList do
for all a in atList do
d ← a.containsDescr(e.descr)
v ← a.valMatch(e.descr, e.value)
vs ← a.valueSetMatch(e.descr,e.value)
p
e
(a) ← mass(d, v, vs)
end for
m
e
← normalize(p
e
)
m
all
← combine(m
all
,m
e
)
end for
return heapsort(atList, m
all
)
end function
For each evidence and AT, a degree of belief (DoB)
is calculated by assigning a mass value and normal-
ization over the search set. All normalized mass func-
tions m
e
are combined with the Dempster Shafer rule
(Shafer, 1976). See more details in (Stamm and Den-
gel, 2012a).
Evaluations showed that the AT search is robust
in terms of parameterization. We also examined that
selected evidence types influence search performance
and that an evidence structure is needed for optimiz-
ing search performance. A two level structure was
sufficient for our simple evaluation corpus. We be-
lieve that for larger evidence type sets, as appearing in
enterprises, we need a more sophisticated structure.
3.2.4 Enterprise Requirements
The application of AT search faces two main chal-
lenges in the enterprise environment:
Initial Evidence Structure. We need a structure for
the initial evidence-based search for prioritizing
the AT set with a minimum number of search
steps, i.e., number of evidences used for search.
Identification of Documents without Attentive
Tasks. We need a failure detection strategy to iden-
tify documents without a corresponding AT - ei-
ther documents that trigger a new process or cases
where AT generation failed. So we can avoid pro-
cessing errors.
4 INFORMATION GAIN TREES
In this section, we present a structure for deciding ini-
tial evidence extraction for search. This structure is
build with supervised learning and applied automat-
ically to Attentive Task (AT) search. We propose to
generate evidence trees labeled with the average in-
formation gain at this level. In the following, we in-
troduce the tree structure, the supervised learning al-
gorithm and the integration into the AT search.
4.1 Learning
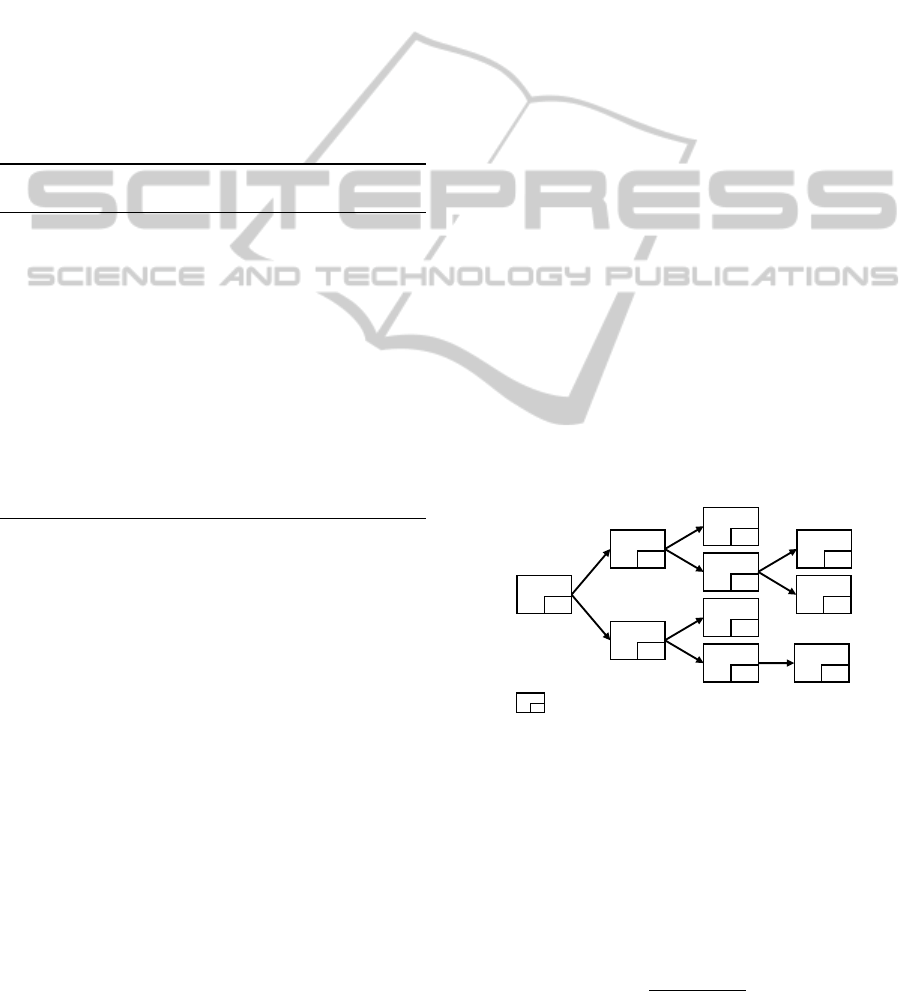
Figure 3 displays an exemplary information gain tree.
Apart from the root node, it contains nodes, each la-
beled with an evidence type and the average infor-
mation gain value of this evidence type at the current
level. Leaves are reached when no evidence type gen-
erates an information gain above a defined threshold.
The tree span is limited by the number of evidence
branches at each level.
root
1.00
eType1
ig
1
eType2
ig
2
eType3
ig
3
eType4
ig
4
eType7
ig
7
eType8
ig
8
eType5
ig
5
eType6
ig
6
eType9
ig
9
eTypeX - evidence type ig
X
- avg. information gain
Node
Figure 3: Information gain tree.
We rely on the concept of information gain IG in-
troduced by Kullback and Leibler, because it mea-
sures the difference between the current entropy H
and the expected entropy H
e
after applying one more
attribute (= evidence) e to the current search set (Kull-
back and Leibler, 1951). The information gain for an
evidence e on a set of ATs A is defined as follows:
IG(A,e) = H(A) − H
e
(A|e) (1)
=
∑
v∈val(e)
|{a|a
e
= v}|
|A|
H
e
({a|a
e
= v})
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
84

where a ∈ A and a
e
is the slot in a with evidence type
of e. Since the information gain depends on the cur-
rent AT set, we learn average information gains for
random AT sets repeatedly for each tree level.
Algorithm 2: Generate information gain tree.
function GENERATETREE(set,ets,tree,n)
nodeList ← avgIn f oGains(set, ets,tree,n)
topList ← getTopItems(nodeList,thresh,branch)
if isEmpty(topList) then return tree
end if
for all n2 in topList do
tree ← addNode(tree,n,n2)
tree ← generateTree(docs,ats, ets,tree,n2)
end for
return tree
end function
function AVGINFOGAINS(set,ets,tree,n)
usedEts ← getPath(tree,n)
le f tEts ← reduceList(ets, usedEts)
for i ← 0 : i ≤ iterations;i + + do
ats ← createRandomATSet(set)
doc ← selectRandomDoc(ats, set)
doc.evids ← analyseDoc(usedEts)
prioAts ← atSearch(ats, doc.evids)
subAts ← createSubgroup(prioAts)
for all e in le f Ets do
g ← calcIn f oGain(subAts,doc,e)
in f oGains(e).add(g)
end for
end for
avgIGs ← calcAvgIn f oGains(in f oGains)
nodes ← createNodes(le f tEts,avgIGs)
return sort(nodes)
end function
The tree learning algorithm is outlined in Algo-
rithm 2. It consists of two functions, generateTree
and avgIn f oGains. The first one is a recursive func-
tion that learns a tree tree for a given test set set
consisting of documents and their related ATs, based
on average information gain values. First, we calcu-
late for all evidence types ets the average information
gains and return a list of nodes nodeList. From this
list, we select the top items limited by a branching
factor branch and a fixed minimum threshold thresh
for the information gain value. If the topList does not
contain any more evidence types, we have reached a
leaf and return. Otherwise, we add each node from
topList to the tree and perform generateTree on the
next level from the current node n2.
The function avgIn f oGains calculates repeatedly
information gains for the remaining evidence types
ets on a random AT set set. First, we get a list of all
used evidence types usedEts from the tree and reduce
the list to the available evidence types le f tEts. We
repeat information gain calculation iterations times.
For each iteration, we select a random AT search set
ats and a corresponding document doc. Then, we ex-
tract all evidences doc.evids according to the used ev-
idence types. AT search is performed. Based on the
priority list of ATs, we select the remaining, matching
AT subgroup subAts. For this subgroup, we calculate
the information gain g for each evidence type. Finally,
we calculate the average information gain values for
each evidence type and return a sorted node list.
4.2 Application to Search
Algorithm 3 outlines, how we apply the learned infor-
mation gain tree to AT search.
Algorithm 3 : Extract evidences from document doc ac-
cording to evidence decision tree tree.
function APPLYEVIDENCETREE(doc,ats,tree)
while tree.hasNext() do
node ← tree.getNextWithMaxIn f oGain()
e ← analyse(doc,node.eType)
if e! = null then
evidList.add(e)
else
tree.stepBack()
tree.prunePaths(node.eType)
end if
end while
prioList ← AT search(ats, evidList)
return prioList
end function
The function applyEvidenceTree generates one path
of evidences evidList within the tree tree that can be
extracted from the document doc.The DA results are
applied as evidences to AT search. For generating the
evidence list evidList, the next node node in the tree is
selected by the maximum information gain assigned
to the descendants of the current node. If this evi-
dence type can be extracted from the document, the
evidence e is added to the list of evidences. If not, we
move one level up in the tree and prune all paths in
the tree that include this evidence type. The resulting
evidence list is used for AT search and the function
finally returns a sorted AT list.
5 FAILURE DETECTION
STRATEGIES
Sometimes, when a document arrives , there does not
exist a matching Attentive Task (AT). This is either
EnhancingAttentiveTaskSearchwithInformationGainTreesandFailureDetectionStrategies
85

the case if the document invokes a new process in-
stance in the enterprise or if the generation of the AT
failed (see Section 3.2.2). During AT search, we need
to decide fast if there is an AT or not for avoiding pro-
cessing errors. These search failures can be handled
by creating a new AT from the corresponding AT tem-
plate. In the following, we present three strategies and
combinations of them for identifying such documents
during or in advance to AT search.
5.1 Specific Evidence Types
Documents triggering a new process instance often
contain evidence types that are not contained in other
documents and vice-versa. These are most likely ba-
sic information that is not mentioned again during a
conversation. We propose learning of evidence types
specific for new requests and extracting them before
AT search. Equation 2 formalizes the rule for deter-
mining AT failure for a document d depending on ev-
idence types E
new
specific for new documents:
f ail
spec
(d,E
new
) =
(
1.0 if ∃e ∈ d.E|e.t ∈ E
new
0.0 else
(2)
where failure is true (1.0) if there exists at least one
evidence e extractable from the document d.E, whose
evidence type e.t is contained in E
new
. This approach
is not costly in terms of search steps, because it does
only require extraction steps. It cannot detect AT gen-
eration failures.
5.2 Expected Degree of Belief
The degree of belief (DoB) measures to which extent
each AT matches the evidences from a document in
comparison to all other ATs. Therefore, we propose
to use the DoB value for detecting documents, where
we believe that no AT matches. We compare an ex-
pected DoB dob
e
for a set of evidence types E to the
actual DoB of the first AT in the prioritized list dob
top
.
If the difference is beyond a threshold t, a failure is
detected. Equation 3 formalizes failure detection for
a document d, the AT set A, and an expected DoB
function dob
e
, as well as a threshold function t:
f ail
DoB
(d,A,dob
e
,t) = (3)
(
1.0 if dob
e
(d.E, |A|) − dob
top
(d.E, A) > t
0.0 else
where failure is detected if the difference between
the expected DoB dob
e
and the actual top DoB after
search dob
top
is greater than the defined threshold.
This strategy postulates that the DoB of docu-
ments with existing AT differs significantly from doc-
uments without AT. We conduct evaluations in ad-
vance to confirm this assumption. Since the detec-
tion strategy includes information about the current
AT set, it addresses both failure cases.
5.3 Attentive Task Templates
For failure handling we generate new ATs from AT
templates. We, therefore, propose to add all AT tem-
plates to the AT search set. Equation 4 formalizes
template failure detection for a document d, the cur-
rent ATs A, and all templates T :
f ail
tem
(d,A,T ) =
(
1.0 if a
top
(d,(A ∪ T )) ∈ T
0.0 else
(4)
where failure is detected if the top AT a
top
after search
on the combined AT set A and T is a template.
This strategy addresses both failure cases and is sim-
ple to implement, since it does not require learning.
5.4 Hybrid Strategies
We consider combining the different strategies for
achieving better and faster detection results. The Ex-
pected Degree of Belief and AT Templates strategies
exclude each other, because inserting templates in the
search set prevents using the DoB of a non-matching
AT on top of the list. Thus, we combine the Specific
Evidence Types strategy with the other ones. First, we
detect if a document contains an evidence type spe-
cific for new documents. If the document passes the
test, we apply the second or third strategy. In this way,
we expect to reduce the search steps for new docu-
ments and to improve overall detection success.
6 EVALUATION OF
INFORMATION GAIN TREES
We conduct evaluations with the information gain tree
structure. First, we learn the tree and apply it then to
Attentive Task (AT) search.
6.1 Evaluation Setup
We perform the evaluations on a corpus generated
from two business processes of a financial institu-
tion. The corpus includes 49 emails from probands
that conducted requests toward a bank. Each docu-
ment in the corpus has been annotated with document
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
86
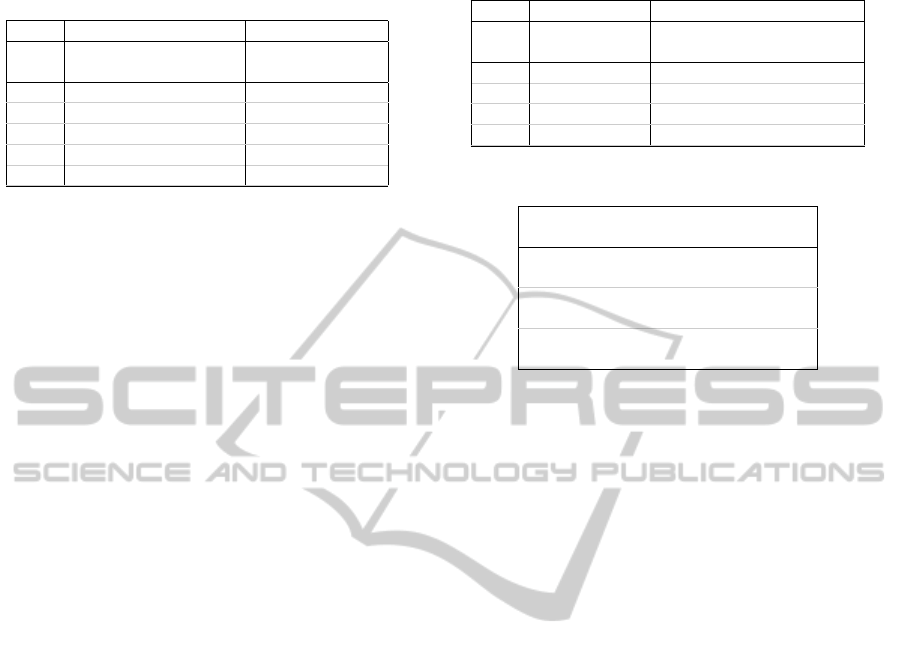
Table 2: Information gain tree properties for alternating
branches and thresholds.
Number of nodes Average depth
Threshold
Branches 0.4 0.3 0.2 0.15 0.1 0.4 0.3 0.2 0.15 0.1
1 0 2 5 3 3 0.0 2.0 5.0 3 3
2 0 6 69 104 87 0.0 2.0 5.8 7 7,1
3 0 12 365 1,898 5K 0.0 2.0 5.9 7.8 8.9
4 0 15 792 9K 83K 0.0 2.0 5.8 7.9 10.1
5 0 18 1,392 23K >1,000K 0.0 2.0 5.7 7.9 11.7
analysis (DA) results and we have generated an AT
for each document. Our approach is general to all in-
put channels, but we focus on email here for reducing
complexity not relevant to search performance. It is
possible to extend the approach to the other channels.
The evaluations of the information gain tree have
been conducted in two steps:
1. Tree Learning. The proposed tree learning algo-
rithm depends on the information gain threshold
and the number of branches per node. We varied
both parameters for analyzing resulting trees in
terms of number of nodes and average tree depth.
2. Tree Search. The goal of using information gain
trees is to provide a structure that reaches good
search results in a minimal number of search
steps. We compare the tree setups generated dur-
ing learning and compare them to simpler struc-
tures as random selection from all evidences (All),
a set of best performing structures (Top7), and the
two level structure (Top7 2-Level).
6.2 Tree Learning
The overall goals of implementing information gain
trees are the minimization of search and extraction
steps, while keeping good search results, creating a
structure that is robust to non-extractable evidences,
and minimizing learning time.
During learning evaluation, we, alternated the two
main parameters - branch factor and threshold - to ter-
minate branch extension. For each tree, we counted
the number of nodes that directly correlates to learn-
ing time, and the average tree depth that influences
number of search steps. We derive the main findings
depicted in Table 2 as follows:
Learning Time. The lower the threshold and higher
the branch factor is, the larger the tree becomes –
growing exponentially. In terms of learning time,
the threshold should be limited to 0.2, whereas
branches to 4. A threshold of 0.4 or higher does
not generate any node (except the root node).
Search Steps. Average tree depth depends on the
threshold and increases when decreasing the
Table 3: Information gain tree search results.
AvgRank Search steps (extraction)
Threshold
Branches 0.3 0.2 0.15 0.1 0.3 0.2 0.15 0.1
1 0.74 0.75 0.74 0.74 1.1 (2.0) 1.3 (2.2) 1.4 (2.2) 1.3 (2.2)
2 0.75 0.74 0.75 0.75 1.1 (2.9) 1.3 (3.1) 1.3 (3.1) 1.3 (3.1)
3 0.75 0.74 0.75 0.74 1.1 (3.7) 1.3 (4.0) 1.3 (4.0) 1.3 (4.0)
4 0.75 0.74 0.74 0.74 1.2 (4.6) 1.4 (5.0) 1.4 (5.0) 1.4 (5.0)
Table 4: Performance of previous methods.
Method Evidences AvgRank Search steps
(extraction)
All
E=6 1.04 6.0 (6.0)
E=7 0.77 7.0 (7.0)
Top7
E=3 1.17 3.0 (3.0)
E=4 0.54 4.0 (4.0)
Top7 2-level
E=2 0.81 2.0 (2.0)
E=3 0.59 3.0 (3.0)
threshold. Experienced in simple search, good
search results derive from 3 or more search steps.
A threshold between 0.3 and 0.4 is corresponding.
Branches. The more branches, the more robustness
to not extractable evidences we achieve. There-
fore, a high branching factor is preferable, but
does also influence learning time tremendously.
The results show, that a limitation of the number
of branches, can help to limit overall tree size.
We conclude that the limitation of threshold and
branches is necessary for limiting tree learning time.
6.3 Tree Search
For tree search, we compare search performance
and runtime optimization for each tree configuration.
Then, we compare tree search with the three previ-
ously used methods for determining initial evidences:
All, Top7, and Top7 2-level. For search performance,
we use the average ranks as main measure. Optimiza-
tion is measured in search and extraction steps.
We summarize the results in Table 3 as follows:
Average Rank. All trees perform similar with an av-
erage rank between 0.74 and 0.75. A small, sim-
ple tree structure is sufficient for achieving good
search results for our corpus. The evidences in the
first branch are most likely extractable.
Search Steps. Average number of search steps is low
(from 1.1 to 1.4) and increases slightly with de-
creasing threshold. This supports that in most
cases the first branches are used for search.
Extraction Steps. Average number of extraction
steps increases from 2.0 up to 5.0 with decreasing
threshold and increasing branching factor. When
EnhancingAttentiveTaskSearchwithInformationGainTreesandFailureDetectionStrategies
87

an evidence in the first branches cannot be used,
several extraction steps are necessary.
Comparing the tree search results to the previous
methods (see Table 4) reveals that tree search reaches
similar search performance as All between 6 and 7 ev-
idences, as Top7 between 3 and 4, and as Top7 2-level
between 2 and 3. We infer that the main advantage of
tree search is the optimization of search and extrac-
tion steps in comparison to simpler methods.
In conclusion, we found a structure that optimizes
search and extraction steps and delivers good search
results with relatively low effort in training time and
calibration of the method. We believe, the informa-
tion gain trees will enable our system to deal with
more complex setups.
7 EVALUATION OF FAILURE
DETECTION
In this section, we evaluate the different failure detec-
tion strategies regarding detection performance. We
pre-evaluate the degree of belief (DoB) in dependence
on the search set size and the evidence type to prepare
the second strategy (expected DoB).
7.1 Evaluation Setup
We evaluate on the same corpus in two steps:
1. Degree of Belief Values. We conduct Attentive
Task (AT) search on random search setups for
evaluating the dependency of the degree of be-
lief (DoB) value on search set size and evidence
type. Further, we repeat the experiment for under-
standing, how DoB develops in case of a search
failure, and for generating a threshold. We repeat
each search setup 20,000 times.
2. Failure Detection Strategies. We evaluate each
of the proposed strategies: 1) specific evidence
types, 2) expected DoB, 3) inclusion of AT tem-
plates, as well as hybrid strategies, 1) & 2) and 1)
& 3). We compare them with established classi-
fication measures: precision Pr = t p/(t p + f p),
recall Re = t p/(t p + f p), and accuracy Acc =
(t p + f p)/(t p + f p +tn + f n). True positives t p
are correctly detected failures, false positives f p
non-failures classified as failures, true negatives
tn correctly detected non-failures, and false nega-
tives f n not detected failures. We also conduct a
separate evaluation of the two failure cases. Ad-
ditionally, we aim at minimizing the costly search
steps. Experiments were repeated 80.000 times
for each setup including varying number of search
steps from 1 to 6, which are the number of evi-
dences used for search.
7.2 Degree of Belief Evaluation
We repeated DoB experiments for different ATs
search sets and varied the search set size, number of
evidences as input for search, and the type of evidence
group. For evidence groups, we differentiate between
the best performing evidence types from our previous
work (Top7), all evidence types (All), and all possi-
ble evidence types without the Top7 (All w/o Top7).
For each search experiment, we generate a random
AT set of random size, select one corresponding doc-
ument, extract evidences according to the evidence
type group, and execute search. The findings depicted
in Figures 4 (a) - (c) are summarized as follows:
Search Set Size. The larger the search set is, the
smaller the DoB value of the corresponding AT.
Figure 4 (a) displays the DoB development for all
evidence types when one evidence is used. This
effect is diminished with increasing number of ev-
idences (see Figure 4 (b)). To measure the devel-
opment over search set size we calculate the com-
pound growth rate (CGR)
3
between search set size
2 and 17 for different evidence numbers.
Evidence Type Performance. The well performing
evidence types (Top7) have less decreasing influ-
ence on the DoB value than the others. We derive
that DoB is more stable for calibrated searches.
Search Failures. Comparing the DoB for successful
searches and the top DoB for failures shows that
only a few selected evidence type combinations
result in relevant differences between the values
(see Figure 4 (c)). This is caused by many ev-
idences also matching to one or more incorrect
ATs. In such a case, the ATs get a higher match-
ing value and after normalization they get a value
similar to the correct AT. For the expected DoB
strategy, we use only the selected evidence types
and half of the average difference as threshold.
We conclude that in our setup the DoB value is highly
sensitive to search set size and evidence type. There
are only a few evidence type combinations that allow
to use the DoB distance to an expected DoB for iden-
tifying if the corresponding AT is not included in the
search set. We will further evaluate the related strat-
egy, but these results indicate that the expected DoB
strategy could become fragile in other domains.
3
CGR(s
0
,s
n
) = (
avgDoB(s
n
)
avgDoB(s
0
)
)
1
s
n
−s
0
− 1, s
i
is the search set
size and avgDoB(s
i
) the average DoB for search set size s
i
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
88

1 3 5 7 9 11 13 15 17
0.0
0.2
0.4
0.6
0.8
1.0
(a) Influence of search set size on DoB
Search set size (#AT)
AvgDoB
●
●
Top7
All w/o Top7
●
●
●
●
●
1 2 3 4 5
−10
−8
−6
−4
−2
0
●
●
●
●
●
●
●
●
●
●
(b) Influence of #Search steps on DoB
#Search steps
CGR(2,17) in %
●
●
●
Top7
All
All w/o Top7
●
●
●
●
●
1 2 3 4 5
0.0
0.2
0.4
0.6
0.8
●
●
●
●
●
(c) Delta of DoB for missing ATs
#Search steps
dob
e
− dob
top
●
●
Top7
Selection
Figure 4: Influencing factors on Degree of Belief (DoB) values: (a) Influence of search set size for all evidence types on DoB,
(b) Influence of search steps (= no. of evidences) on average compound growth rate of DoB, (c) and influence of search steps
and selection of evidence types on distance between expected DoB and top DoB when the Attentive Task is missing.
Table 5: Classification performance of the failure detection strategies.
1) Evidence types 2) Expected DoB 3) Templates 1) & 2) 1) & 3)
#Search steps Pr Re Acc Pr Re Acc Pr Re Acc Pr Re Acc Pr Re Acc
0 1.00 0.23 0.47 - - - - - - 1.00 0.23 0.47 1.00 0.23 0.47
1 - - - 0.77 0.54 0.57 1.00 0.23 0.34 0.82 0.71 0.69 1.00 0.52 0.59
2 - - - 0.93 0.80 0.82 0.99 0.53 0.60 0.94 0.87 0.87 0.99 0.73 0.77
3 - - - 0.93 0.77 0.80 0.99 0.73 0.76 0.94 0.86 0.86 0.99 0.86 0.87
4 - - - 0.93 0.59 0.69 0.98 0.85 0.86 0.94 0.75 0.80 0.98 0.93 0.93
5 - - - 0.92 0.51 0.63 0.98 0.88 0.88 0.94 0.70 0.76 0.98 0.94 0.94
6 - - - 0.92 0.39 0.55 0.98 0.91 0.90 0.95 0.62 0.71 0.98 0.96 0.95
7.3 Failure Detection Strategies
We evaluate the five proposed detection strategies on
a randomly generated AT set for a randomly selected
document. We alternate the number of evidences used
for search, because this is the most expensive calcu-
lation step (O(n
2
)). We repeat all experiments for
search failure and for non-failure.
For documents triggering a new process compared
to documents related to one process instance, we use
the ratio from the corpus (new: 38%, instance: 62%).
For the case of AT generation failure, we assume a
50% ratio. We expect a much lower ratio in enter-
prise application. Due to the dependency on the AT
generation approach, it is difficult to predict this ra-
tio. We apply the same ratios for all strategies, so the
results remain comparable.
The main findings are depicted in Table 5 and a
separate overview of the two cases of search failure is
displayed in Figure 5 (a) and (b). We summarize the
results for each strategy as follows:
1) Selected Evidences. This strategy does not in-
volve any search steps. Precision is optimal (1.0)
whereas recall (0.23) and accuracy (0.47) are very
low. The reason for the discrepancy is that the
strategy only detects documents triggering a new
process (see Figure 5 (a) & (b)).
2) Expected DoB. This strategy performs optimal
when using two evidences. It reaches precision
of 0.93, recall of 0.80, and accuracy of 0.82. Ac-
cording to the DoB pre-evaluations, the difference
between expected DoB and DoB in case of failure
is best differentiating and leads to good results.
The development is for both failure cases similar.
3) Templates. When including AT templates, preci-
sion decreases slightly (from 1.00 to 0.98) with
increasing search steps, whereas recall and accu-
racy increase tremendously (from 0.23 to 0.91,
from 0.34 to 0.90). This correlates to the general
AT search development, where increasing number
of evidences improve search results. The strategy
performs better for generation failures than new
documents. A similar performance to strategy 2)
at search step two is reached with four.
1) & 2). The combination leads to better failure de-
tection performance overall. There is again an
optimum for two search steps. Precision reaches
0.94, recall 0.87, and accuracy 0.87. This is
caused by the improvements in new document de-
tection (see Figure 5 (a)).
1) & 3). This hybrid strategy also improves detection
performance. Accuracy (from 0.47 to 0.98) and
recall (from 0.23 to 0.96) increase with number
of search steps. Precision decreases again from
1.0 to 0.98. The improvements are caused by
improvements in new email detection (see Fig-
ure 5 (a)). A similar performance to strategy 1)
& 2) at search step two is reached with three.
We conclude that it is recommendable using a hy-
brid strategy. The combination with the expected
EnhancingAttentiveTaskSearchwithInformationGainTreesandFailureDetectionStrategies
89

● ● ● ● ● ●
1 2 3 4 5
0.0
0.2
0.4
0.6
0.8
1.0
●
●
●
●
●
●
●
●
●
●
●
●
● ● ● ●
● ●
●
● ● ●
● ●
(a) Accuracy for new documents
#Search steps
Accuracy
●
●
●
●
●
1) Specific evidences
2) Expected DoB
3) Templates
1) & 2)
1) & 3)
● ● ● ● ● ●
1 2 3 4 5
0.0
0.2
0.4
0.6
0.8
1.0
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
(b) Accuracy for AT generation failure
#Search steps
Accuracy
●
●
●
●
●
1) Specific evidences
2) Expected DoB
3) Templates
1) & 2)
1) & 3)
Figure 5: Accuracy of the failure detection strategies sepa-
rated by the case of absent AT: (a) New document without
related AT, (b) AT of the document is missing.
DoB strategy results in best detection performance
with only two search steps. Nevertheless, this strat-
egy also has drawbacks. The learning of evidence
combinations is intricate, the results seem fragile and
depend on the application domain. Additionally, the
required evidences for a good detection performance
might not perfectly fit with the optimal evidences for
initial search. Hence, we hesitate recommending this
strategy in general for any domain.
The combination with templates appears more re-
liable, even if it produces similar results as 1) & 2)
with three search steps. The selection of evidences for
search is compatible with initial evidence selection
and the method does not require pre-learning. We,
therefore, recommend implementing template search
in the first place and evaluating the performance of
expected DoB in the particular domain.
8 CONCLUSIONS
In this paper, we propose two approaches enhancing
our existing AT search algorithm and making it more
robust to real world requirements: (i) information ev-
idence gain trees and (ii) missing Attentive Task (AT)
detection strategies. First evaluations already show
that the application of trees significantly minimizes
search steps and we expect it to support even more
complex search domains. For search failure detection
strategies, we found that combining the specific evi-
dence type decisions with the two strategies integrat-
ing the search set performs best. For simplification,
we recommend applying first the insertion of AT tem-
plates and then investigating whether the expected de-
gree of belief (DoB) comparison is applicable to the
corresponding domain or not.
For future work, we plan transferring the results to
more complex domains and increasing the search set
size. Further, we aim at evaluating DA planning.
REFERENCES
Bellotti, V. et al. (2005). Quality vs. quantity: Email-centric
task-management and its relationship with overload.
Human-Computer Interaction, 20:1–2.
Cohen, W., Carvalho, V., and Mitchell, T. (2004). Learning
to classify email into ”speech acts”. In Proceedings of
EMNLP.
Dengel, A. and Hinkelmann, K. (1996). The specialist
board - a technology workbench for document anal-
ysis and understanding. In IDPT.
Dredze, M., Lau, T., and Kushmerick, N. (2006). Automati-
cally classifying emails into activities. In Proceedings
of IUI.
Faulring, A. et al. (2010). Agent-assisted task management
that reduces email overload. In Proceedings of IUI.
Granitzer, M. et al. (2009). Machine learning based work
task classification. Journal of Digital Information
Management.
Katz, A. and Berman, I. (2011). Designing an e-mail pro-
totype to enhance effective communication and task
management: A case study. Serdica Journal of Com-
puting, 5.
Kr
¨
amer, J. (2010). Pim-mail: consolidating task and email
management. In Proceedings of CHI.
Kullback, S. and Leibler, R. (1951). On information and
sufficiency. The Annals of Mathematical Statistics, 22.
Kushmerick, N. and Lau, T. A. (2005). Automated email
activity management: an unsupervised learning ap-
proach. Proceedings of IUI.
Scerri, S., Gossen, G., Davis, B., and Handschuh, S. (2010).
Classifying action items for semantic email. In Pro-
ceedings of LREC.
Shafer, G. (1976). A Mathematical Theory of Evidence, vol-
ume 1. Princeton university press Princeton.
Stamm, K. and Dengel, A. (2012a). Attentive tasks:
Process-driven document analysis for multichannel
documents. Proceedings of DAS.
Stamm, K. and Dengel, A. (2012b). Searching attentive
tasks with document analysis evidences and dempster-
shafer theory. Proceedings of ICPR.
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
90
