
Smart Household
Selected Problem Solutions using Intelligent Controllable Electric Appliances
Miroslav Pr
´
ymek and Ale
ˇ
s Hor
´
ak
Faculty of Informatics, Masaryk University, Botanicka 68a, 602 00 Brno, Czech Republic
Keywords:
Smart Home, Home Automation, Power Consumption Planning, Multi-agent Systems.
Abstract:
In the current perspectives, renewable power sources bring new challenges for the power distribution. Substan-
tial advances in the reliability and flexibility in the overall power consumption can be achieved via a network
of intelligent and controllable appliances, especially on the micro level, i.e. on the level of individual electric
appliances within the scope of one household or one institution. In the paper, we identify the typical problems
of the smart household approach and present a communication and control model which offers a solution to
these problems based on the multi-agent system approach.
1 INTRODUCTION
Within the search for new alternative energy sources
the percentage of electricity produced by renewable
power sources grows rapidly in the worldwide mea-
sures. The irregular nature of these sources brings
new demands on the control of the power distribution
network (Ibrahim et al., 2008). A possible solution
lies in the design of smart power grids on all levels
of the energy flow ranging from the wide distribution
networks to housing estates, institutions or individual
households. A combination of a set of small decen-
tralized sources of electric power, photovoltaic sys-
tems being a typical example, and a smaller or larger
set of intelligent or intelligently controlled electric ap-
pliances offers new operation scenarios of power con-
sumption profiles (Roncero, 2008).
In order to analyze the design details of new in-
telligent elements of a power network in the smart
household concept, we have identified typical imple-
mentation problems connected with combined power
distribution from heterogeneous sources. The solu-
tions to these problems have been incorporated in the
development process of a new Smart Home Simula-
tion (SHS) system that is implemented at our institu-
tion and is used as a research testbed for this topic.
1.1 Common Power Distribution
Problems Connected with
Heterogeneous Sources
In this section, we identify the major problems caused
by the inflexibility of the traditional power grids in
the environment with increasing number of unstable
sources.
The biggest problem of new renewable sources of
electrical power is that their production is driven by
natural conditions and their production profile can-
not be changed to suit the consumption profile of
the users. This limits the usability of renewable
sources not even on the national level but even more
as sources in the off-grid arrangement.
One of the possible approaches lies in the effort to
improve the means of energy storage. This approach
surely attracts attention (Carrasco et al., 2006). The
parameters of the energy storage facilities are improv-
ing but the usability is still very limited.
Another approach works with adjusting the power
consumption profile to better suit the profile of the
source – in contrary to the conventional control of
the particular sources. This brings new problems
of communication between the sources and the con-
sumers (or consumer appliances), consumption plan-
ning and appliance control itself. These problems are
complicated but the effect is obvious and the limita-
tions are often not as strict (physical) as in the above-
mentioned problem of energy storage.
Next issue of the renewable sources is their un-
avoidable instability. To increase the grid control ef-
fectiveness, the supply changes must be either pre-
dictable or the appliance must be capable of very fast
reactions to the situation and it must adjust its param-
eters accordingly. This puts strong requirements on
the flexibility and speed of the control system.
204
Prýmek M. and Horák A..
Smart Household - Selected Problem Solutions using Intelligent Controllable Electric Appliances.
DOI: 10.5220/0004236502040210
In Proceedings of the 5th International Conference on Agents and Artificial Intelligence (ICAART-2013), pages 204-210
ISBN: 978-989-8565-38-9
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

Nevertheless, the grid control system can solve
not only the problems connected with new power
sources. The ability to quickly, flexibly and specif-
ically control particular power consumers (up to the
appliance level) brings also new possibilities from the
whole power network perspectives. One of them is
the ability to appropriately react on negative external
influences like blackouts, brownouts and other non-
standard situations.
In the next section we will present a model of an
intelligent power grid and in Section 3 we will show
how an implementation of this model can diminish
the described problems.
2 PRIORITY-BASED POWER
GRID CONTROL MODEL
The problem of power grid control is in general a
problem of coupling between the providers (power
sources) and consumers. A general solution to this
problem is to employ standard market mechanisms
to establish deals between providers and consumers,
mainly in the form of an energy auction. Block et
al. (Block et al., 2008) present a good review and
comparison of many proposed auction styles and their
implementations presented in the literature. They
conclude that the main disadvantage of the market
approach is the lack of sufficient flexibility (immedi-
acy requirement) of the underlying algorithms. The
grid control model construction obviously is a mat-
ter of trade-off between the complexity and feature-
completeness on the one hand and interactivity and
ease of implementation on the other.
In our work, we focus on the micro-grids on the
household level and therefore we stress the later crite-
rion in the presented model to make the model more
straightforward and implementable even in low-cost
embedded controllers dedicated to particular house-
hold appliances. The whole model is built using
the multi-agent system approach, where the required
global operation model is obtained purely by means
of inter-agent communication (the details are pre-
sented further).
The central notion of the model is a priority. In-
stead of providing a complicated way to reach a con-
sensus between a producer and a consumer by the
means of an auction, the model assumes that the price
along with other criteria constitutes the summary
value determining the coupling between a producer
and a consumer. The coupling is based on the fun-
damental rule that high-priority consumers must, in
every moment, be satisfied before the lower-priority
ones.
The system priorities are also assigned to pro-
ducers, the second system rule is: consumers with
priority p can only be satisfied by producers with
the priority ≤ p. The resulting behavior of the sys-
tem approximates the auction result in the way where
non-necessary (low-cost) appliance effects are not ac-
quired for the price of inappropriate costs. E.g. long-
term heat accumulation is not performed when the
system is in an outage and running on an expen-
sive power source such as a diesel power generator.
And vice versa: the lowest priority is assigned to the
”no-cost” power sources like photovoltaic panels such
that, in an ideal case, all power from them is con-
sumed instead of more expensive power from the grid.
In the Smart Home Simulation (SHS) model im-
plementation (Pr
´
ymek and Hor
´
ak, 2012), the follow-
ing navigation labels are used as a hint for user to de-
cide which priority to assign to particular appliances
and their states:
1. unnecessary, time unlimited
2. small outcome
3. significant outcome
4. user inconvenience avoidance
5. financial loss avoidance
6. significant user inconvenience avoidance
7. significant financial loss avoidance
8. health risk avoidance
2.1 Appliance Categories
The grid appliances are classified into several types
according to their control mechanism, user expectan-
cies and power consumption profiles.
2.1.1 Interactive Appliance
An interactive appliance (IA) is directly controlled by
the user and the IA’s reaction cannot be deferred. Also
the power consumption is mostly constant and cannot
be controlled.
A typical examples of such an appliance is electric
light, electric kettle or television.
2.1.2 Intelligent Interactive Appliance
Intelligent Interactive Appliance (IIA) is a special
case of the previous type. The main difference lies in
the IIA’s power control. The appliance can have more
power consumption profiles which can be chosen ac-
cording to the current situation or it can be driven by
special extra communication/control treatment (e.g. a
server computer power cannot be cut off immediately,
instead a control signal must be emitted and the com-
puter will undergo the internal shut down process as
soon as possible).
SmartHousehold-SelectedProblemSolutionsusingIntelligentControllableElectricAppliances
205
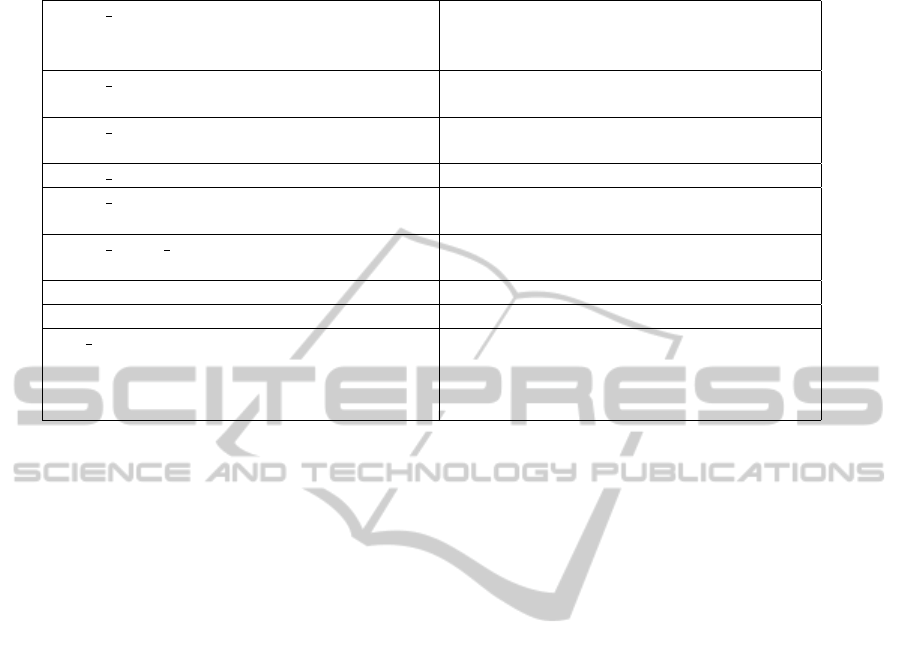
Table 1: Summary of system messages used between agents in the Smart Home Simulation system.
power available(from,amount,priority) The power source agent advertises the
amount of power it can supply to the network
starting at the time from
power request(from,amount,priority) An appliance agent requests amount power
starting at time from
power granted(from) The scheduler agent authorizes the given
consumption request
power denied(until) A consumption request is denied
power release(from) The agent’s consumption will end in time
from and the power will be freed
power grant proposal(from) An appliance agent advertises that the appli-
ance can defer the consumption to time from
accepted() A given proposal is accepted
refused() A given proposal is refused
not implemented() A response that the previous message is not
understood or the requested functionality is
not implemented (e.g. the appliance can not
defer its consumption)
A typical example of IIA is a computer.
2.1.3 Deferrable-operation Appliance
This appliance is also controlled by the user but an
immediate operation is not necessary. When the user
commands the appliance to operate, he/she only ex-
pects it to begin the work in a reasonable (configured)
amount of time. The user does not depend on the pre-
cise time of the operation start and end, only the op-
eration result must be delivered appropriately.
Typical examples of deferrable-operation appli-
ances are washing machine, dryer, dishwasher, slow
cooker, car battery charger and generally all appli-
ances which require some user intervention before
the operation and whose products are expected to be
available in a longer time.
2.1.4 Feedback-controlled Appliance
A feedback-controlled appliance (FCA) is usually de-
signed to keep a predefined and (repeatedly) mea-
sured value within specified limits. The value is spon-
taneously tending in one direction and the power sup-
ply is needed to push it in the opposite direction. A
conventional operation cycle is as follows: whenever
a feedback value reaches the lower bound, the appli-
ance engine is powered up to push it to the oppo-
site bound and powered off as soon as this value is
reached. This way the power profile of the appliance
consists of alternating periods of maximal and none
power consumption of a more or less constant dura-
tion.
A generalization of the feedback-controlled appli-
ance model in SHS is based on the assumption that
the boundaries of the appliance operation should not
be defined as hard limits that cannot be exceeded
but rather as gradually increasing measures of the
power demand priority. From this point of view, a
FCA appliance can be seen as a highly flexible device
whose power consumption can be efficiently planned
to fit together with a power consumption profile of
other less-controllable devices. From the most gen-
eral point of view it can be seen as a power storage
device. Of course, FCA cannot store arbitrary amount
of power – low amounts of stored power would have
unintended consequences such as e.g. food going to
rotten in an under-cooled refrigerator.
2.2 The System Communication
In contrast with the auction-style planning, the pre-
sented model is designed to achieve good planning
results without the need of a complicated communi-
cation schema and slow decision-making algorithms.
Hence it is well suited for implementation even in
small embedded devices without a substantial com-
puting power.
The final power consumption plan of the whole
system is driven by a scheduler agent with its deci-
sions based on the communication of consumption re-
quests between the scheduler and the appliances. The
architecture of the system is centralized and directive
from the decision-making point of view. However, the
planning and primary reasoning is decentralized. The
field agents (particular appliance controllers) make up
suitable individual plans and present them as sugges-
tions to the scheduler agent. The scheduler then pre-
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
206

pares the final authoritative decision. With this ap-
proach the whole system is user-controllable and pre-
dictable.
Of course, the centralized architecture is not suit-
able for control of an arbitrarily large number of de-
vices. Instead of a flat horizontal scaling, the hier-
archical scalability must be used. This corresponds
to the energy distribution model where every distri-
bution point has a limited number of sub-branches
which are to be controlled as a solid blocks. There-
fore, we focus on the control of a relatively small
unit (household) with the aim to make it a more pre-
dictable unit on the higher level of the power distribu-
tion topology.
A list of the main system messages is presented
in Table 1. All communicated values are considered
valid until changed. That is why the system uses only
the ”from” property with no ”to”. Examples of par-
ticular communication scenarios are presented in the
next section.
3 SMART GRID PROBLEM
SOLUTIONS
In this section, we refer to the power grid problems
identified above and we offer their solutions justified
by the solution implementation within the presented
Smart Home Simulation system.
3.1 Surplus Power
The conventional not-controllable appliances can usu-
ally be only in on or off mode. Electronics usually add
some sort of power-saving mode which does not limit
the user experience as much as the off mode while
consuming substantially less power than the full-on
mode.
This principle can be generalized as “provide
maximal effect to the user for the minimal amount of
power.” Such general principle is applied in many ar-
eas and is undoubtedly the right one as an effort to
minimize the cost/effect ratio.
But in the environment with uncontrollable and
hardly predictable sources of energy, the mere savings
do not necessarily present the best result. With many
renewable source types the price of the energy mostly
consists of the share of the fixed purchase-price of the
facility. Therefore to minimize the cost/effect ratio,
there is a need to increase the effect, not to lower the
cost.
Without intelligent appliance control, the surplus
power can only be stored for future use or sold. The
first solution surely is the best one, but the efficiency
of power storage is still insufficient and the costs are
high. Selling the surplus power can have complicated
administrative or technical preconditions and so can-
not be easily applied to small amounts of energy. Also
it is unusable for the off-grid operation.
In the smart grid environment with controllable
appliances, the problem of surplus power can be
solved in a flexible way. The precondition is that
intelligent appliances in the network support sev-
eral consumption level modes (ideally arbitrarily
selectable consumption level with fixed consump-
tion/effect ratio) and the control system can quickly
negotiate the right consumption level according to the
amount of power currently available in the system.
3.2 Intelligent Sources Allocation
The next identified problem consists in searching
the correspondence between the consumption and the
power supply such that:
• the cheapest sources are used to the maximal ex-
tent
• peaks are minimized
• the user experience is not substantially affected
These goals can be met with intelligent consumption
planning according to the predicted power supply. In
the SHS priority-driven model, this is solved by rear-
ranging particular appliances operation in such a way
that the priority constraints are met.
The problem is illustrated in Figure 1. Three small
charts on the left side depict the consumption plan
of the three appliances (the first two are feedback-
controlled and the third is an IIA). The cumulated
demand chart on the right side shows the overall re-
quested power consumption of these three appliances.
Darker color of a bar means higher priority. The cu-
mulated demand must be matched with the supply
prediction. The algorithm is as follows:
1. the demand and supply plans are approximated by
discrete values (bars on the chart),
2. both plans are partitioned to have equal time-
spans with constant values,
3. each timespan of the demand plan is compared to
the corresponding timespan of the supply plan.
The third step is illustrated by the “matching” label in
the chart. In this graphical representation, the priority
rule can be described as: the darkest bars of the de-
mand are preferably matched with the lightest bars of
the supply and each bar of the demand must not end
higher than the corresponding supply bar of the same
or lighter color. We can see that the rule is not satis-
fied with the bars marked with the “X” sign – i.e. the
corresponding consumption requests do not fulfill the
constraints and will be denied by the scheduler.
SmartHousehold-SelectedProblemSolutionsusingIntelligentControllableElectricAppliances
207
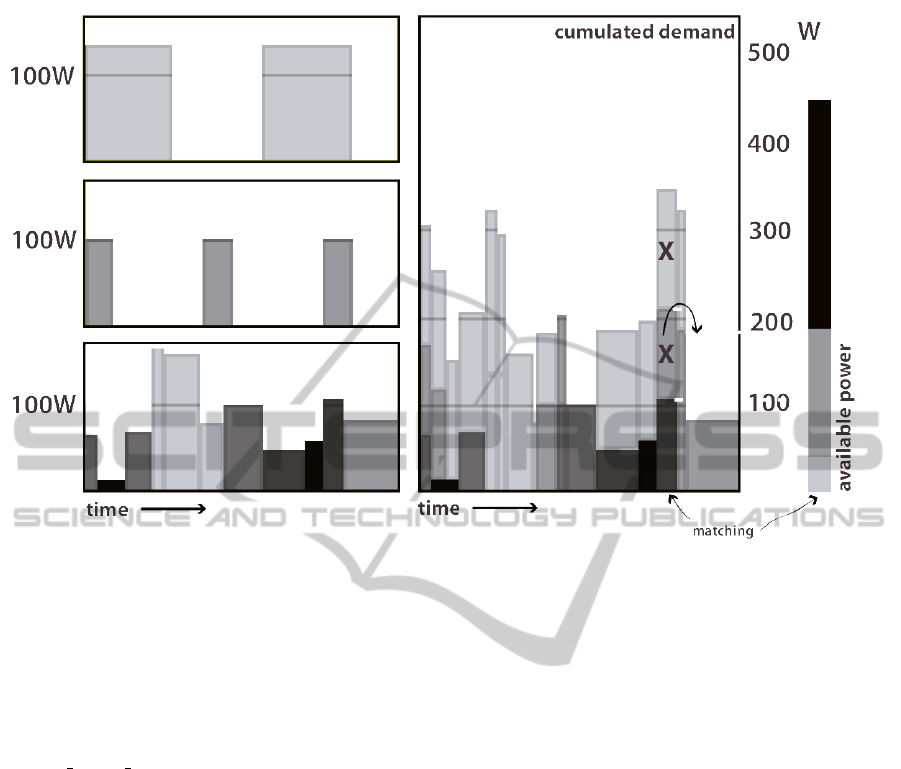
Figure 1: Visualization of the supply/demand matching algorithm.
In addition to the binary decision whether to
approve or reject a particular consumption request,
the scheduler also proposes a solution to the situ-
ation: in this example to shift the consumption to
the timespan where it would satisfy the priority con-
straints (marked with an arrow and a dotted bar in
the cumulated demand chart). The scheduler sends
the power grant proposal message to the appliance
agent and the appliance agent decides whether the
postponement of this particular consumption request
is acceptable or not. It will communicate its decision
to the scheduler with the accepted() or refused()
message.
This way the peaks in the consumption plan will
be eliminated if possible without a negative impact on
the appliances operation (they autonomously decide
whether the proposal is acceptable or not).
3.3 Unexpected Events
In a similar way, the scheduler can react to the unex-
pected drop of the power supply. We can again illus-
trate the situation in Figure 1. If the lightest bar of the
supply will not be in place, even the above-described
time-shift of the consumption would not solve the sit-
uation. This consumption request will be denied be-
cause it has lower priority than any available power
source of the appropriate capacity. Nevertheless, this
one-source outage will not affect the appliances with
higher priority. This way the network will automat-
ically adapt its operation to the changed conditions
caused by external influences.
4 PROTOTYPE
The research of SHS is directed to testing in real-
world situations. In the following sections, we de-
scribe the hardware and software parts of the SHS
testbed.
4.1 Hardware
The efforts to develop standards for home automa-
tion communication infrastructure have a long history
(e.g. see (Murata et al., 1983)). But none of the pro-
posals gained dominance in the field and up today
there are many incompatible standards of the hard-
ware infrastructure (lines level), communication pro-
tocols and software solutions. Many of them are pro-
prietary and patented so they are not well suited for
open, vendor-independent solution development.
One of the oldest solutions is an X10 standard us-
ing the house electrical wiring as the physical layer
for communication. There were attempts to improve
the standard and overcome some of its limitations,
namely CEBus and LonWorks (for their comparison
see (Strassberg, 1995)). These standards are often
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
208

limited in purpose – the type of information to be
communicated is limited to the specific home automa-
tion commands like “dim lights to x%” or “switch the
device on.”
Another approach is to utilize the standards used
in the industrial communication – e.g. RS485, Mod-
bus, or the standards used in the computers or con-
sumer electronics: I2C, 1-Wire, SMBus, Ethernet,
USB. The disadvantage of the consumer electronics
standards (except Ethernet) is that they were not de-
signed for large-scale communication.
The Ethernet standard seems as a best solution due
to its widespread use. Moreover, Ethernet networks
are used as convergence networks for once separated
networks like phone lines (VOIP), TV wiring (IPTV)
etc. Nevertheless, the Ethernet standard is not us-
able for our scenario mainly because its complexity
– its implementation in low-power microcontrollers
is inconvenient, hard or even impossible. The best
approach is to use chips specialized for the Ether-
net communication, however, this makes the solution
more expensive and complicated.
For our prototype implementation, we have de-
cided to choose the RS485 standard (Electronic In-
dustries Association, 1983). Its main advantages can
be summarized as:
• it is widespread and highly tested, mainly in the
industrial environment
• it is designed to be very interference-resistant –
RS485 uses differential signaling (two symmetric
signal wires)
• it does not place high demands on the wire quality
– the common twisted pair cable is used, so stan-
dard existing house wiring (e.g. Ethernet Cat5 or
phone cables) can be used
• it can achieve high transmission speed or long dis-
tances (about tens of megabits over tens of meters
or up to hundred kilobits over one kilometer long
cable)
• its electronic implementation is simple and cheap
• unlike its predecessors (mostly RS232, also
known as the computer ”serial port”), the RS485
is a multi-drop bus, so multiple clients can be con-
nected to the same wire
The main disadvantage of the RS485 standard is that
it defines only the physical layer of the communi-
cation. The communication protocol must be cho-
sen/developed independently. It is common to use a
custom-developed protocol over the RS485 line. This
is also the case of our prototype. To keep the proto-
type flexible for future extensions, we have decided
to use a ”meta-protocol” encapsulating the commu-
nication data itself. The communication protocol is
based on the master/slave principle, so we have used
the same approach for the data exchange on the line
level. The cooperative master/slave communication
can also be implemented in simple microcontrollers
because it does not need complicated collision detec-
tion like in other shared-media protocols such as the
CSMA/CD used in a coaxial-cable Ethernet standard.
The details of the communication protocol implemen-
tation are outside of the scope of this paper.
4.2 Software
The overall controlling system consists of a central
agent implementing the main scheduling and plan-
ning logic (scheduler) and many autonomous agents
controlling particular household appliances (nodes).
The nodes are autonomous because the scheduler
does not instruct them with precise orders. Instead the
nodes just inform the scheduler about their knowledge
of the situation and future predictions. The sched-
uler then summarizes the knowledge and instructs the
nodes about which actions are viable and which are
not.
In this arrangement, the assumptions about the ca-
pabilities necessary in each network node are kept
as low as possible. In combination with the chosen
physical layer (RS485), a device controller can be
implemented with the cheapest low-power microcon-
trollers. For instance the above-described interactive
appliance needs just the following capabilities:
• one sensor for user interaction
• one actuator for device control
• implementation of a few communication acts (see
Table 1)
• one cheap-chip RS485 line driver
This functionality can be implemented e.g. with At-
mel ATtiny microcontroller (priced about USD 3)
with one RS485 driver chip. Due to the chosen co-
operative master/slave protocol, the line driver can be
only half-duplex, so again very cheap (under USD 1).
In our prototype we have used software implemen-
tation for Arduino prototype boards (Banzi, 2008).
The Arduino board is based on the Atmel microcon-
troller so the developed software can be uploaded to
the above-mentioned Atmel ATtiny with only minor
or no modification.
As we have argued earlier in the paper, the SHS
protocol is very scalable. It is possible to implement
the basic functionality with a small microcontroller,
but at the same time sophisticated behaviour can be
implemented with more-computing-power chips or
computers.
The scheduler is a standard-computer software
implemented in the Erlang programming language,
SmartHousehold-SelectedProblemSolutionsusingIntelligentControllableElectricAppliances
209

which is well suited for this purpose due to its capa-
bilities:
• highly-concurrent programming
• distributed computing and multi-agent systems
with highly autonomous nodes
• it is well tested in the industrial environment
• it is designed for high-availability and fault-
tolerance
• it provides good performance
• it is portable
The scheduler software is used not only to manage
the information in the network and to control the de-
vices operation but also to provide an overview of the
network functionality and immediate state of the re-
sources planning.
The SHS software also implements agents for vir-
tual appliances. This way, we can use the software for
the simulation of the household appliances planning,
or to control real appliances through the physical net-
work and microcontroller-controlled devices. Proba-
bly the most interesting feature is the ability to freely
mix these types of agents to form a semi-virtual, semi-
real network and simulate its behavior with different
scheduling scenarios.
5 CONCLUSIONS
We have identified the main problems that are com-
mon to most of the smart grid consumption control
systems, such as the treatment of the surplus power
from renewable power sources, intelligent allocation
of multiple power sources to consumer appliances or
the reactions to unexpected events in the power net-
work.
Besides the references to standard solutions to
these problems with the description of the respective
drawbacks such as high costs of the requested facili-
ties or high demands on the computing algorithms, we
have presented a new Smart Home Simulation (SHS)
system that is based on priority matching algorithms
and flexible communication infrastructure which can
incorporate large variety of nodes from the simplest
microcontroller-driven appliances up to sophisticated
and intelligent computer-driven systems. We have
shown how the SHS system can be advantageously
used to solve the identified smart grid problems.
Nowadays, SHS has been used for simulation and
post-hoc analysis of real-world systems and basic real
devices control. The future research of SHS is di-
rected to the evaluation of the system in connection
with networks with live intelligent appliances.
ACKNOWLEDGEMENTS
This work has been partly supported by the Czech
Science Foundation under the project 102/09/1842.
REFERENCES
Banzi, M. (2008). Getting Started with Arduino. O’Reilly
Media.
Block, C., Neumann, D., and Weinhardt, C. (2008). A mar-
ket mechanism for energy allocation in micro-chp
grids. In Hawaii International Conference on System
Sciences, pages 172–180, Los Alamitos, CA, USA.
IEEE Computer Society.
Carrasco, J., Franquelo, L., Bialasiewicz, J., Galv
´
an, E.,
Guisado, R., Prats, M., Le
´
on, J., and Moreno-Alfonso,
N. (2006). Power-electronic systems for the grid inte-
gration of renewable energy sources: A survey. Indus-
trial Electronics, IEEE Transactions on, 53(4):1002–
1016.
Electronic Industries Association (1983). Electrical Charac-
teristics of Generators and Receivers for Use in Bal-
anced Multipoint Systems – EIA Standard RS-485.
Ibrahim, H., Ilinca, A., and Perron, J. (2008). En-
ergy storage systems – characteristics and compar-
isons. Renewable and Sustainable Energy Reviews,
12(5):1221–1250.
Murata, M., Namekawa, T., and Hamabe, R. (1983).
A proposal for standardization of home bus system
for home automation. Consumer Electronics, IEEE
Transactions on, CE-29(4):524 –530.
Pr
´
ymek, M. and Hor
´
ak, A. (2012). Priority-based smart
household power control model. In Electrical Power
and Energy Conference 2012, pages 405–411, Lon-
don, Ontario, Canada. IEEE Computer Society.
Roncero, J. (2008). Integration is key to smart grid man-
agement. In SmartGrids for Distribution, 2008. IET-
CIRED. CIRED Seminar, pages 1 –4.
Strassberg, D. (1995). Home-automation buses: Protocols
really hit home. EDN Magazine, 40(8):69–79.
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
210
