
Multi-agent Reinforcement Learning based on
Multi-channel ART Networks
Hitomi Morishita, Hiroaki Ueda and Kenichi Takahashi
Graduate School of Information Sciences, Hiroshima City University, Hiroshima, 731-3194, Japan
Keywords:
Multi-agent Reinforcement Learning, FALCON, Multi-channel ART Networks, Hearts.
Abstract:
3-channel fuzzy ART network FALCON is a good solution to combine reinforcement learning with state
segmentation, where it learns the relations among percepts, actions and rewards. FALCON, however, does
not have a mechanism to predict behavior of other agents, and thus it is difficult for FALCON to learn the
optimal agent’s behavior in a multi-agent circumstance. In this paper, an action prediction module based on
2-channel fuzzy ART network is proposed, and FALCON is modified in order to be able to register the output
of the action prediction module. The modified FALCON is called FALCON AP. Moreover, FALCON ER that
estimates the expected value of rewards and selects an action according to the value is proposed. Through
experiments in which FALCON, FALCON AP and FALCON ER are applied to a card game Hearts, it is
shown that FALCON ER receives less penalty points and learns better rules.
1 INTRODUCTION
Many researchers have developed and proposedmeth-
ods to solve various problems in the real world
by modeling them with autonomous agent systems
(RoboCup, 2012; CST, 2010). It is required that those
systems should be able to observe information from
environments and to determine an optimal action that
leads a solution of the problem from the observed
information. When we model an environment close
to the real world with an agent system, information
that agents perceive tends to be given in the form of
continuous real numbers. In order to learn an util-
ity function for the pair of discretized states and ac-
tions like Q-learning, methods that segment a percept-
state space adaptively by Voronoi maps and Adaptive
Resonance Theory(ART) and obtain efficiently opti-
mal action rules for agents by reinforcement learn-
ing using the discrete space have been developed
(G.A. Carpenter and Rosen, 1991; Hamagami and Hi-
rata, 2003; H.Ueda and T.Miyahara, 2008). In recent
years, 3-channel fuzzy ART network FALCONia Fu-
sion Architecture for Learning, COgnition and Navi-
gationj(Tan, 2004; Tan and Xiao, 2005) has been pro-
posed to combine reinforcement learning with state
segmentation and learn the relations among percepts,
actions and rewards. However, it is difficult to apply
these methods directly to multi-agent environments
where prediction of other agents’ behavior and acqui-
sition of cooperated actions are required.
In this paper we modify FALCON so as to be
able to predict other agents’ behavior and apply the
method to a multi-player game with imperfect in-
formation; we call the method FALCON AP (FAL-
CON considering action probability of other agents).
In FALCON
AP, we implement an action prediction
module based on 2-channel fuzzy ART network and
add fourth channel to FALCON so that it can receive
the output of the action prediction module. More-
over, we implement FALCON ER that estimates the
expected value of rewards and selects an action ac-
cording to the value. We apply these methods to a
card game Hearts and examine whether the methods
are effective or not.
2 FALCON WITH PREDICTION
FALCON (a Fusion Architecture for Learning, COg-
nition and Navigation) (Tan, 2004) is an extended
fuzzy ART (fuzzy Adaptive Resonance Theory) so
that it can learn the relations among percepts, actions
and rewards. In multi-agent environments, prediction
of other agents’ behavior is important for choosing
optimal actions. Thus, we extend FALCON so that it
can receive the predictive information of other agents
and can learn the relations among the four kinds of in-
461
Morishita H., Ueda H. and Takahashi K..
Multi-agent Reinforcement Learning based on Multi-channel ART Networks.
DOI: 10.5220/0004239104610464
In Proceedings of the 5th International Conference on Agents and Artificial Intelligence (ICAART-2013), pages 461-464
ISBN: 978-989-8565-39-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
sensory field
cognitive field
motor field
percepts
action
reward
n
1
n
L
n
J
. . .
. . .
s
1
s
2
s
M
ρ
s
feedback field
ρ
m
ρ
f
a
1
a
2
a
K
. . .
r
1-r
. . .
. . .
. . .
ρ
p
. . .
prediction
p
1
p
2
p
o
. . .
prediction field
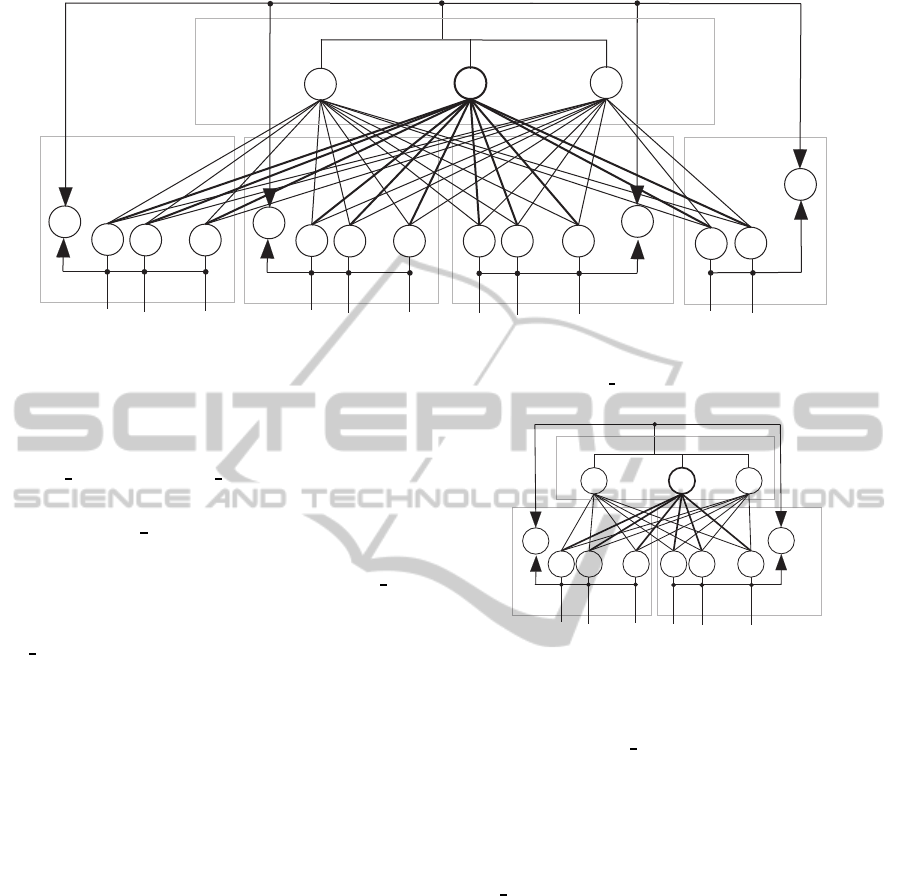
Figure 1: A neural network architecture of FALCON AP.
formation, namely, predictions, percepts, actions, and
rewards. We propose and examine two extensions:
FALCON AP and FALCON ER.
2.1 FALCON AP
An architecture of an extended version FALCON AP
(FALCON considering action probability of other
agents) of FALCON is shown in Figure 1. FAL-
CON AP has an architecture in which a prediction
field (PF), a sensor field (SF), a motor field (MF), and
a feedback field (FF) are connected at a cognitivefield
(CF). When an autonomous agent has M sensors, M
neurons that receiveinputs s
i
∈ [0,1](i = 1,...M) from
M sensors are built in at SF. Motor field MF receives
a vector A = (a
1
,...,a
K
) corresponding to an action
chosen by the agent, where K is the number of ac-
tions. Elements a
k
’s of the vector A are set as fol-
lows: a
k
= 1 if action k is chosen, and a
k
= 0 other-
wise. FF has 2 neurons; one receives reward r and the
other receives 1−r, where r ∈ [0,1] is the reward that
the agent receives. Prediction field PF receives infor-
mation of predictive behavior of other agents. Vector
P = (p
1
,..., p
O
) in Figure 1 is a prediction vector to
other agents’ behavior, where O is the number of ac-
tions other agents can choose. Elements p
o
’s in P take
real values of 0 ≤ p
o
≤ 1. We calculate the probability
that another agent takes action o as p
o
/
∑
k
p
k
.
The cognitive field CF has L neurons. Neuron n
J
in CF is connected to neurons in PF, SF, MF, and FF
with weighting vectors W
p
J
= (w
p
1,J
,...,w
p
O,J
), W
s
J
=
(w
s
1,J
,...,w
s
M,J
), W
m
J
= (w
m
1,J
,...,w
m
K,J
), and W
f
J
=
(w
f
1,J
,w
f
2,J
), respectively, where elements w
y
x,J
∈ [0,1]
of weighting vectors indicate the degree of relations
between n
J
and neurons in PF, SF, MF, and FF, re-
sensory
field
cognitive field
motor
field
percepts
action
. . .
. . .
. . .
s'
1
s'
2
s'
M
. . .
ρ
'
s
ρ
'
m
p
1
p
2
p
O
. . .
. . .
n'
1
n'
L
n'
J
Figure 2: A network architecture of an action prediction
module.
spectively. FALCON AP learns the relations among
predictions, percepts, actions, and rewards by updat-
ing weighting vectors W
p
J
, W
s
J
, W
m
J
, and W
f
J
, respec-
tively, in the same manner as FALCON does.
Similar to FALCON, an action is chosen in the
action choice phase, and weighting vectors of FAL-
CON AP are updated in the action learning phase.
Hereafter, we call neuron n
J
in CF category n
J
.
In the action choice phase, a percept vector S =
(s
1
,...,s
M
) obtained from sensors is inputted to SF,
a K-dimensional vector N = (1,...,1) whose all ele-
ments are 1’s is inputted to AF, and the reward vector
R = (1,0) is inputted to FF. We calculate prediction
vector P for the prediction field using an action pre-
diction module shown in Figure 2. In this paper, we
build an action prediction module by 2-channel fuzzy
ART, i.e. FALCON without FF. Action prediction
vector P for a target agent to be predicted is calculated
as follows. First, information S = (s
1
,...,s
M
) that the
learning agent can perceive for a target agent is in-
putted to SF, the K-dimensional vector N = (1,...,1)
whose all elements are 1’s is inputted to MF in the
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
462

prediction module, and then a category n
′
J
whose
choice intensity is the largest is determined. Next, we
use weighting vector W
′m
J
between n
′
J
and MF as pre-
diction vector P for the input to the prediction field of
FALCON AP. Then category n
J
whose intensity for
choice is the largest in CF of FALCON AP is chosen
as a winning category. An action is chosen according
to the weighting vector W
m
J
; action k whose weight-
ing value is the largest, i.e. maxarg
k
w
m
k,J
in W
m
J
, is
usually chosen.
In the action learning phase, either reinforcement
or reset of the relations among predictions, percepts,
actions, and rewards is performed depending on the
reward the learning agent obtained. When the learn-
ing agent received a positive reward, the prediction
vector P = (p
1
,..., p
O
) obtained from the action pre-
diction module is inputted to PF, the percept vector
S = (s
1
,...s
M
) obtained from sensors is inputted to SF,
the action vector A that indicates the action the agent
chose is inputted to MF, the reward vector R = (1, 0)
is inputted to FF. Then the weighting vectors between
the winning category n
J
and each of vectors in PF, SF,
MF, FF are updated. In the action learning phase of
the action prediction module shown in Figure 2, the
percepts vector is inputted to SF, the action vector A
that indicates the action the agent chose is inputted to
MF, and the weighting vectors between n
′
J
and each of
vectors in SF and MF are updated. When the learning
agent received a negative reward, the weighting vec-
tors are updated to weaken the relations among input
vectors.
2.2 FALCON ER
We propose another extended version of FALCON;
we call the extended version FALCON ER (FALCON
considering the expected reward). FALCON ER pre-
dicts other agents’ behavior for each action the learn-
ing agent can take using its action prediction module,
and determines the action of the learning agent ac-
cording to the expected value of rewards calculated
according to the prediction. For example, assume that
actions the learning agent can take are a
1
and a
2
. Also
assume that there are two other agents, and agent 1
and agent 2 choose and carry out actions according
to the action the learning agent carried out. Then, we
calculate the expected reward in the following. FAL-
CON ER first predicts action p
1,1
of agent 1 when the
learning agent choose action a
1
and then predicts ac-
tion p
2,1
of agent 2 after actions a
1
and p
1,1
are taken.
Next, we calculate expected reward r
1
that the learn-
ing agent receives after actions a
1
, p
1,1
and p
2,1
are
taken. Expected reward r
2
for action a
2
the learning
agent chooses is also calculated in the similar manner
to a
1
by predicting actions of agents 1 and 2.
FALCON ER predicts other agents’ behavior
from the moment the learning agent chooses an ac-
tion to the moment it receives a reward and deter-
mines the action of the learning agent based on the
expected reward. In experiments, we use a card game
Hearts for performance evaluation. When we apply
FALCON ER to Hearts, FALCON ER predicts cards
other agents play until one trick ends and then calcu-
lates the expected value of penalty points obtained at
the trick.
3 EXPERIMENTS
We employ a card game Hearts for performance eval-
uation. In the experiments, our learning agents play
the game against rule-based agents. We compare the
performance of FALCON, FALCON AP and FAL-
CON ER. Based on feature extraction by heuristics
(Fujita, 2004), we determine the percept vector S for
FALCON, FALCON AP and FALCON ER. For the
experiments, we implement a rule-based agent and
use it as players opponent to the learning agent. The
rule-based agent determines an action with rules ex-
tracted from gnome-hearts(Hearts, 2012).
3.1 Hearts
The number of players of Hearts is normally four.
Hearts uses a standard deck of 52 playing cards. The
higher card of the suit wins; the strength of cards is as
follows: in the descending order, A, K, Q, ... , 4, 3,
and 2. There is no superiority or inferiority among
suits. Each player is delivered 13 cards, and must
play a card from his hand at his turn. Starting from
a player and playing a card in clockwise direction un-
til the four players play is called a trick. One game
is completed after successive 13 tricks. In each trick,
the card played by the first player is called a leading
card, and the player is called the dealer. The objec-
tive of Hearts is to obtain fewest penalty points at the
completion of the game. The penalty points of cards
are as follows: Q♠ = 13 points, and every card of suit
♥ = 1 point.
3.2 Experimental Results
In this subsection, we show experimental results for
game Hearts. The maximum number of categories of
FALCON, FALCON AP and FALCON ER is limited
to 1000. Parameter values for them are chosen by pre-
liminary experiments. We use in the following Fig-
ures the average penalty ratio obtained through 1000
Multi-agentReinforcementLearningbasedonMulti-channelARTNetworks
463

Figure 3: Results of FALCON AP.
Figure 4: Results of FALCON ER.
simulation runs for 50 games.
Figure 3 plots the average penalty ratios obtained
by the learning agent using FALCON AP and three
rule-based agents for 50 games. We see in Figure 3
that the average penalty ratios of FALCON AP are
decreasing according to progress of learning. The
penalty ratios of FALCON AP were smaller than
those of FALCON; the action prediction is effective.
However, the average penalty ratio of FALCON AP
is 1.6 times larger than that of the rule-based agent.
Figure 4 plots the average penalty ratios obtained
by the learning agent using FALCON ER and three
rule-based agents for 50 games. The expected reward
r
x
for action x chosen by the learning agent is calcu-
lated as follows.
r
x
=
1
penalty
x
1
trick
+ queen
x
+ 1
, (1)
where penalty
x
is the predicted penalty points for
action x chosen by the learning agent, and trick is
the number of remaining tricks (including the current
trick) in a game. Parameter queen
x
is set 1 if the learn-
ing agent without Q♠ becomes the dealer, and 0 oth-
erwise.
We see in Figure 4 that the average penalty ra-
tios of FALCON ER are slightly decreasing accord-
ing to progress of learning, and that the penalty ratios
of FALCON ER are almost the same as those of the
rule-based agent. The penalty ratios of FALCON ER
are smaller than those of FALCON AP, and the ac-
tion choice based on the expected reward is shown to
be effective.
4 CONCLUSIONS
In this paper, we proposed the module that learns
action prediction of other agents with 2-channel
ART network and implemented a modified FALCON,
namely FALCON AP, to be able to register the out-
put of the action prediction module. Through the ex-
periments using Hearts, FALCON AP can learn op-
timal action rules. Moreover, we implemented FAL-
CON ER that can choose an action on the basis of
the expected reward. Through the experiments, we
showed that the performance of FALCON ER is al-
most the same as that of the rule-based agent.
ACKNOWLEDGEMENTS
This research is in part supported by Hiroshima
City University Grant for Special Academic Research
(General).
REFERENCES
CST (2010). IEICE Concurrent System Technology,
http://www.ieice.org/ cst/compe10/.
Fujita, H. (2004). A reinforcement learning scheme for a
partially-observable multi-agent system. Master’s the-
sis, Graduate school of Information Science, Nara In-
stitue of Science amd Technology.
G. A. Carpenter, S. G. and Rosen, D. (1991). Fuzzy ART:
fast stable learning and categorization of analog pat-
terns by an adaptive resonance system. Neural Net-
works, Vol.4(No.6):pp.759–771.
Hamagami, T. and Hirata, H. (2003). An adjustment of the
number of states on Q-learning segmenting state space
adaptively. Proc. of the IEEE International Confer-
ence on Systems, Man, and Cybernetics, pages 3062–
3067.
Hearts (2012). Hearts for GNOME, http://www.jejik.com/
gnome-hearts/.
H.Ueda, T.Naraki, Y. K. K. and T.Miyahara (2008). State
space segmentation for acquisition of agent behavior.
Web Intelligence and Agent Systems: An International
Journal, IOS Press, Vol.6(No.4):pp.373–385.
RoboCup (2012). The RoboCup Federation, http://
www.robocup.org/.
Tan, A. H. (2004). FALCON: A fusion architecture for
learning, cognition, and navigation. Proc. of Inter-
national Joint Conference on Neural Networks, pages
3297–3302.
Tan, A. H. and Xiao, D. (2005). Self-organizing cognitive
agents and reinforcement learning in multi-agent en-
vironment. Proc. of the IEEE/WIC/ACMInternational
Conference on Intelligent Agent Technology, pages
351–357.
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
464
