
Multi-agent Case-based Reasoning Inference Engine Proposal
for Reusable Robotics
Francisco Gindre, D. Kotlirevsky, S. Scaine, N. Jafelle Fraga and M. Daniela López De Luise
AIGroup, Universidad de Palermo, Mario Bravo 1050 8
th
floor, Ciudad Autónoma de Buenos Aires, Argentina
Keywords: Case-based Reasoning, Reusable, Service Robotics, SaaS, Intelligent Agents.
Abstract: Different articles and surveys on the matter identify a remarkable success of robotics on static environments
that has not replicated on dynamic areas of application. This paper presents the proposal of a research
project that identifies the main hurdles of this issue and present feasible solutions for the matter.
1 INTRODUCTION
The application of robotics as a mean to simplify or
outperform different tasks performed by humans has
been a matter of research since the 1960’s. An
exhaustive survey on “The Evolution of Robotics
Research” (Armada et al., 2007), reveals many
aspects of this discipline that have been in sight of
many research teams throughout the last five
decades.
The success of applied robotics is widely known
in the manufacturing industry (Armada et al., 2007),
providing improvements in key areas as
productivity, quality assurance and safety. This is a
key aspect for today’s trends in robotics application
as remarked on the mentioned article: “Currently,
the creation of new needs and markets outside the
traditional manufacturing robotic market (i.e.,
cleaning, demining, construction, ship building,
agriculture) and the aging world we live in is
demanding field and service robots to attend to the
new market and to human social needs” (Armada et
al., 2007). Several authors address many of the
hurdles that stand between the actual state of the art
of service robotics and the demands expressed in
Garcia Armada’s survey. The following subsections
identify three major issues to overcome in the field
of reusable robotics.
1.1 The Dynamic Environment Issue
The manufacturing field presents one significant
advantage over other possible applications of
robotics: a structured, controlled and limited
environment. Uncertainty is considered an undesired
deviation and therefore is handled by human
operators (Armada et al., 2007). Robots working on
dynamic environments require the ability of
autonomously dealing with uncertainty. Many Soft
Computing techniques have been applied to meet
this requirement such as Bayesian and Neural nets,
Expert Systems (Russell and P., 2003); (Amit,
2000); Concept Learning (López De Luise et al.,
2010), Genetic Algorithms (Gindre et al., 2010) and
Case-Based Reasoning (CBR) (Kolodner, 1992) as
problem solving tools.
1.2 Hardware Variability: Reuse Vs.
Re-work
The cited survey on robotics evolution reveals a
variety of fields in which robotics is being applied
and enumerates various examples of architectures
used for each one of them. This variety is recognized
as limitation in terms of “reusability against re-
work” due to incompatibilities between different
hardware architectures and programming languages
and paradigms. NASA’s CLARAty (Nesnas et al.,
2006) and the “Player/Stage” (Gerkey et al., 2003)
architectures are two approaches towards the
mitigation of the re-work issue by adding abstraction
layers and standardizing communications between
them (with socket APIs).
A study on robotics software reusability (Mallet
et al., 2007) identifies two different aspects of that
matter: Software Architecture and Control
Architecture. The former refers to the usage of
software engineering best practices that facilitate
486
Gindre F., Kotlirevsky D., Scaine S., Jafelle Fraga N. and Daniela López De Luise M..
Multi-agent Case-based Reasoning Inference Engine Proposal for Reusable Robotics.
DOI: 10.5220/0004252204860491
In Proceedings of the 5th International Conference on Agents and Artificial Intelligence (ICAART-2013), pages 486-491
ISBN: 978-989-8565-39-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
reuse. The latter refers to the assembly of such
components into an executable piece of software that
runs on real hardware.
Furthermore, Mallet’s research enumerates
certain factors that help reuse like: “Avoid all-in-one
approaches”, “Avoid static design” and usage of
frameworks as a mean to software abstraction. It
also introduces various examples on OpenRobots
(LAAS-CNRS, 2012) projects that attempt to reduce
re-work and improve reuse specific domains of
application.
1.3 Per-agent Knowledge Issue
Machine learning techniques as CBR or Concept
Learning combine present and past contexts as
feedback to address new situations that must be dealt
with. When having many units (agents) deployed on
the same or a similar environment, local knowledge
bases are generated as a result of using such
algorithms. This derives in the local availability of
new information of the past experiences of each
agent, which generates a “Per-Agent” information
island (Cengeloglu et al., 1994). Such information
schema is a known Anti-Pattern (ISRD Group,
2005) in terms of Software Engineering can be turn
into a reusable software Service-Client pattern by
adding a service-like repository that allows the
information to be shared among the deployed agents
(Patterson and Fox, 2012).
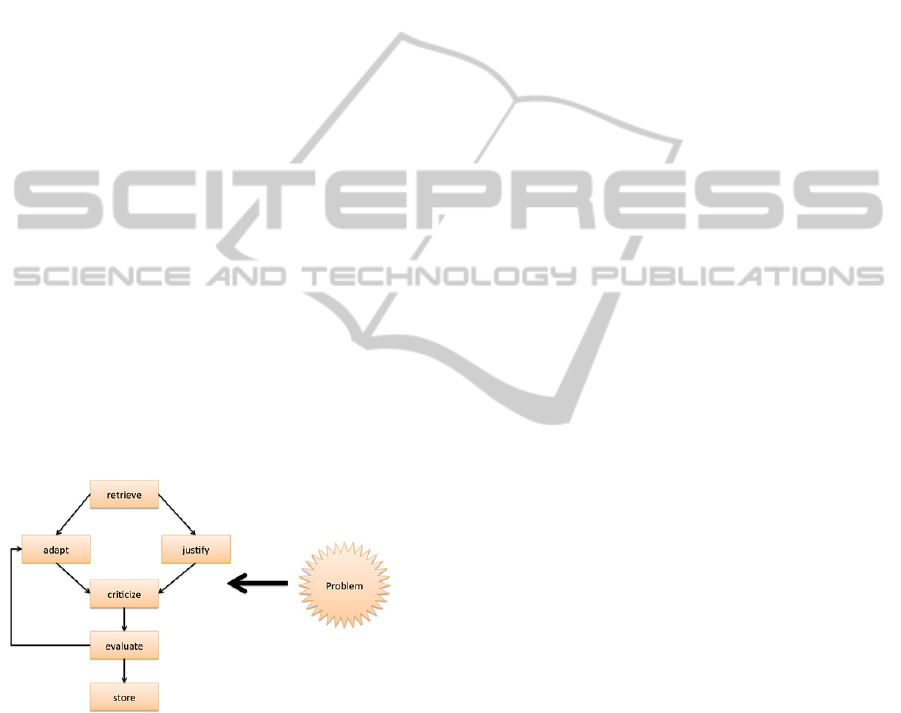
Figure 1a: The CBR Cycle (Kolodner, 1992).
This paper presents the architecture and
prototype design of the SIR project (for its name in
Spanish “Sistema Inteligente Robotizado”). A Case-
Based Reasoning inference engine that helps
intelligent robot agents to cope with dynamic
environments and their challenges. Designed with a
component-based architecture to improve reusability
and reduce re-work by adding abstraction layers and
using broadly used communication protocols to
decouple software from hardware variability and
avoid per-agent information islands.
2 THE SIR_CORE CBR-ENGINE
PROPOSAL
The SIR project aims to develop a system that
provides a centralized inference engine to multiple
collaborating service robots regardless their
hardware or software capabilities. This centralized
inference system (SIR-CORE) aims to deliver a
common framework that allows these robots to have
the capability of acting upon unknown situations by
reusing their own or their collaborators’ past
experiences. The following subsections explain the
selected approaches to address the difficulties shown
in sections 1.1, 1.2 and 1.3.
2.1 CBR for Dynamic Environments
Expert or Knowledge Based Systems (KBS) have
been widely used to capture and represent the
knowledge of an expert of a specific domain and
translate it into a representation that can be of use to
a computer system that emulates the assertions of
the expert. An review of the state of the art of CBR
(Watson and Marir, 1994) recollects that the
efficiency and accuracy of the KBS is tightly
coupled to how effective and exhaustive was the
knowledge elicitation process and how well it is
implemented and represented as a piece of software.
It also identifies the following drawbacks of KBS:
Knowledge elicitation is a difficult process, often
being referred to as the knowledge elicitation
bottleneck;
Implementing KBS is a difficult process
requiring special skills and often taking many man
years;
once implemented model-based KBS are often
slow and are unable to access or manage large
volumes of information; and
they are difficult to maintain
These setbacks represent the opposite requirements
for a reusable inference engine. CBR presents itself
as a technique to overcome the mentioned setbacks
of KBS (Kolodner, 1992).
Firstly, CBR eliminates the knowledge elicitation
bottleneck by reducing it to the act of gathering the
different cases that are presented to a given CBR
agent in a particular area of application. Its
elicitation process means, providing base cases plus
the appropriate means to sense the environment and
gather useful information from it to conform a case
to the case-based reasoner.
Even though CBR systems are initialized with a
set of known cases provided by experts on the area
of application, the elicitation process continues
Multi-agentCase-basedReasoningInferenceEngineProposalforReusableRobotics
487
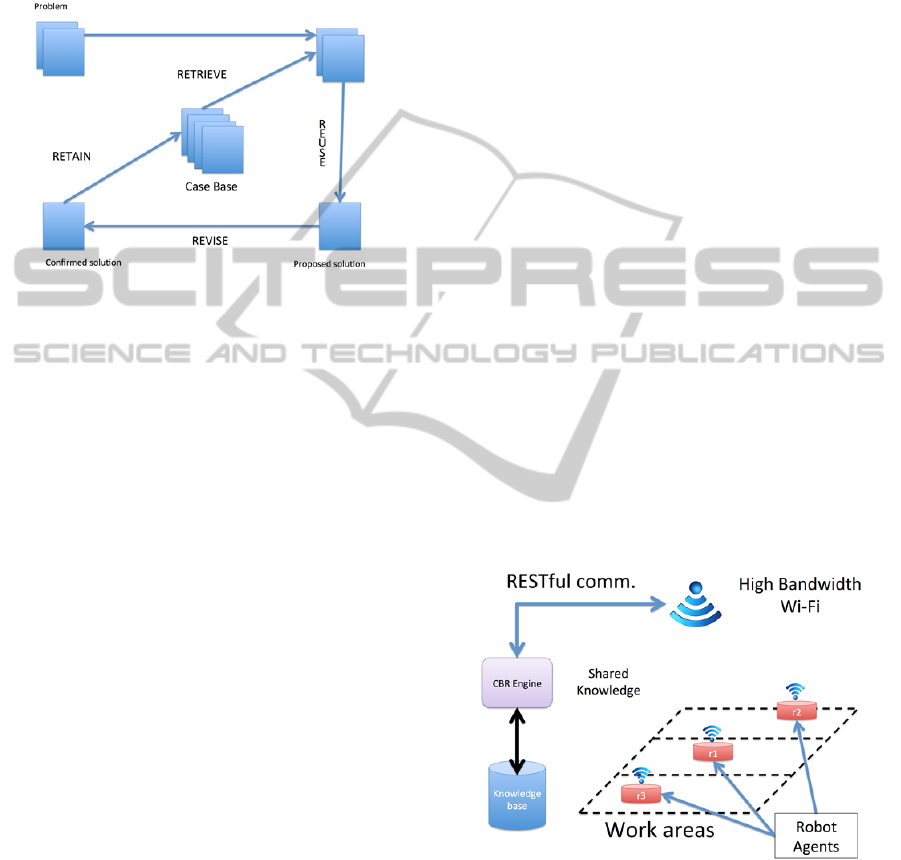
within the CBR cycle itself (figure 1). When a
dynamic environment presents an unknown context
to a given CBR agent, this context can be elicited as
a new case that the agent will attempt to solve with
solution of the most similar case present on it’s own
case knowledge base.
Figure 1b: The CBR Cycle (Aamodt and Plaza, 1994).
Secondly, a single case or a subset of similar
cases can be selected without traversing a set of IF-
THEN rules. Cases can be selected by a variety of
methods depending the data that they encapsulate.
This property enforces reusability, since the case
retrieval can be generalized to the use of a metric
that measures the grade of similitude between 2 or
more cases. However, there is an underlying setback
in it. Querying a vast CBR knowledge base is not
effortless. Kolodner identifies it as the indexing
problem: “is the problem of retrieving applicable
cases at appropriate times” (Kolodner, 1992). This
problem is accentuated when the number of cases in
the KB increases significantly since retrieval
performance decays.
Efforts to mitigate this problem include case
labelling (indexing), two-step ranking that perform
an O(n) search (Walker, 2007). A Hierarchical
organization of cases with induction and decision
Trees achieved a good case retrieval performance.
Nevertheless, according to (Walker, 2007) new case
elicitations tended to render the classifier useless.
In terms retrieving cases (Blanzieri and Ricci,
1999) and (Walker, 2007) conclude that Nearest
Neighbour Classifiers show superior results opposed
to the mentioned techniques. Cunningham’s paper
(Cunningham, 2009) shows different techniques to
measure the distance between two or more cases.
Other works show the usage of relational databases
as Case KB’s by adapting the SQL language to cope
with its limitations to query non-relational data
(Portinale and Montani, 2008) and the use of data
mining techniques as a knowledge discovery aid for
CBR KB (Aamodt et al., 1998).
The evidence shows that the indexing problem
constitutes a scalability limitation for Case Based
Reasoning. Since are non-relational data, RDBMS
need to be modified in order to be viable Case
knowledge bases. The SIR project proposes the use
of NoSQL document databases to handle large
collections of non-relational information (Padhy et
al., 2011).
Thirdly, “A case-based reasoner solves new
problems by adapting solutions that were used to
solve old problems” (Reisbeck and Shank, 1989).
This means that “maintenance” of the knowledge
base occurs on the CBR cycle intrinsically, as a
desired effect instead of as an action to fix the KB
itself. Figures 1a and 1b describe how the Adapt-
Criticize-Evaluate sub-cycle fits in the CBR cycle
proposed by Janet Kolodner. When a CBR agent
senses the environment a new case is created. This
new case will be matched with the existing cases.
Given there is feasible match, the known resolution
will be applied to the sensed case. The application of
this solution will be criticized and evaluated for its
results and adapted if necessary. The result will be
stored in the knowledge base as a new elicited case.
In conclusion, because of the mentioned
contrasts, the CBR cycle can be applied to many
problems (Watson and Marir, 1994). This wide
range of application is major requirement in the
design of the SIR project and one of the main
reasons of using CBR instead of other KBS.
Figure 2: RESTful communications over HTTP.
2.2 RESTfulness for Reuse
Software abstractions are a mean to achieve software
reuse. Both CLARAty and Player/Stage focus on
abstracting communication layer between
components to separate behavior from
implementation. In these terms the SIR project
focuses in designing a communication layer over a
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
488
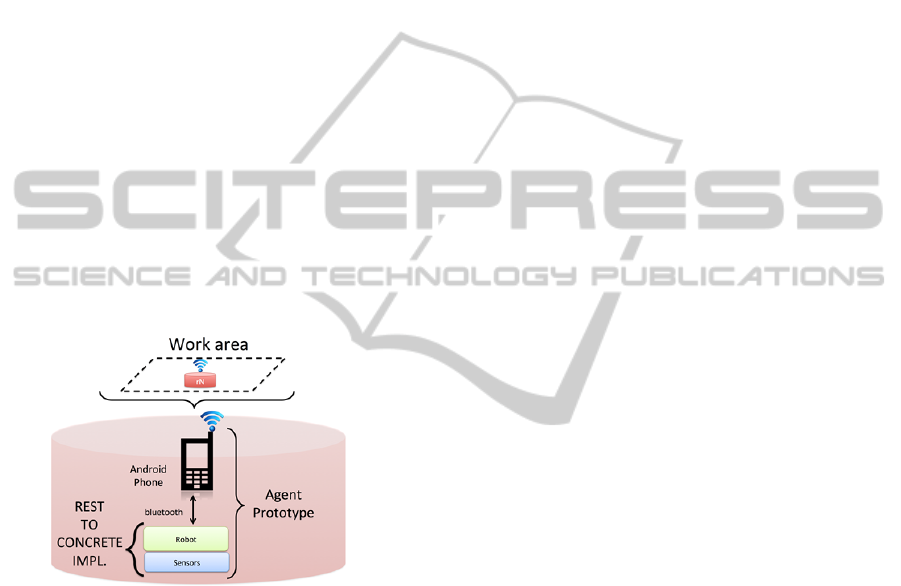
protocol (TCP/IP) that relies on a standard structure
to represent the data rather than sending arbitrary
bytes transferred over sockets. SIR_CORE is a Web
Service (Patterson and Fox, 2012) that relies on
REST (Fielding, 2000) over HTTP (Berners Lee et
al., 1996) to exchange data and requests with the
deployed agents. Service robot agents use the
SIR_CORE CBR engine “as a Service” by
requesting feedback from a given case sending a
GET request to a RESTful URI provided by
SIR_CORE to all the agents. RESTfulness provides
a standardized communication between clients and
servers that avoids the All-in-One approach and
provides the necessary interfaces to for each party to
implement them as needed in any hardware platform
provided that the data interchange adopts the
standard protocols and formats. HTTP supports
many data interchange formats such as JSON
(json.org, 2006) that is a widely used “lightweight,
text-based, Language-independent data interchange
format” or XML (W3 Consortium, 2012).
This makes possible that human operator request
information to the SIR_CORE from a Web
application as well.
Figure 3: Proposed service robotic agent architecture.
2.3 Shared Knowledge Base
Robot Swarms are presented as a collection of
homogenous robots with a simple hardware
architecture collaborating towards a common (and
collaborative) objective (Mohan and Ponnambalam ,
2009). Opposed to that, autonomous standalone
robots are have complex architectures (that can be
heterogeneous as CLARAty) that implement
different mechanisms, like concept learning to
“survive” in the environment they are introduced
into while they attempt to accomplish a given task.
Deploying various robots of the same kind,
configured with the same software and KB on an
equal dynamic environment, can result in diverse
knowledge bases depending on the situations these
different agents went through.
In order to avoid information islands,
autonomous robots would have to synchronize their
knowledge bases either with a central entity or
between peers. Although there are frameworks that
address knowledge exchange between peers
(Cengeloglu et al., 1994), that information would be
shared among those agents who are in range to
establish a communication and that are mutually
compatible. The SIR project proposes a centralized
client/server or Software as Service (SaaS)
architecture that allows a set of heterogeneous
agents to share their knowledge by persisting the
sensed cases in the SIR_CORE server.
This design allows cases to flow transparently
among peers while also contributes to simplify the
hardware implementation of each client, since part
of the computing needs (the CBR) are outsourced to
the SIR_CORE service. Since the communication
protocols used are basically the Internet protocols,
there is virtually no limitation of distance between
these agents between themselves or the SIR_CORE
in order to share their knowledge base. The only
limitation is how much latency is acceptable for the
specific tasks the service robotic agents perform.
3 THE SIR_ROBOT MODULE
The SIR project is designed to let the SIR_CORE
deal with the computational complexity of the
inference engine, so that robotic agents can be as
simple as the problem allows them to be.
A manufacturer adopting the SIR architecture
will only be obliged to provide the necessary
hardware resources for a piece of software to create
and transmit RESTful requests through (wireless)
network that reaches a route to SIR_CORE and
parse the service’s response into executable
instructions for the robot agent.
4 PROJECT FEASIBILITY
4.1 Off-the-Shelf Hardware
Figure 3 depicts a retail off-the-shelf SIR_ROBOT
implementation. The proposed agent prototype
consists of a Lego MindStorms® NXT 2.0 kit (Lego,
2012) with the Open Source LeJOS firmware
(Bagnall, 2011) which runs a Java Virtual Machine
and an Android 2.3 compatible mobile phone
(Google, 2012).
Multi-agentCase-basedReasoningInferenceEngineProposalforReusableRobotics
489
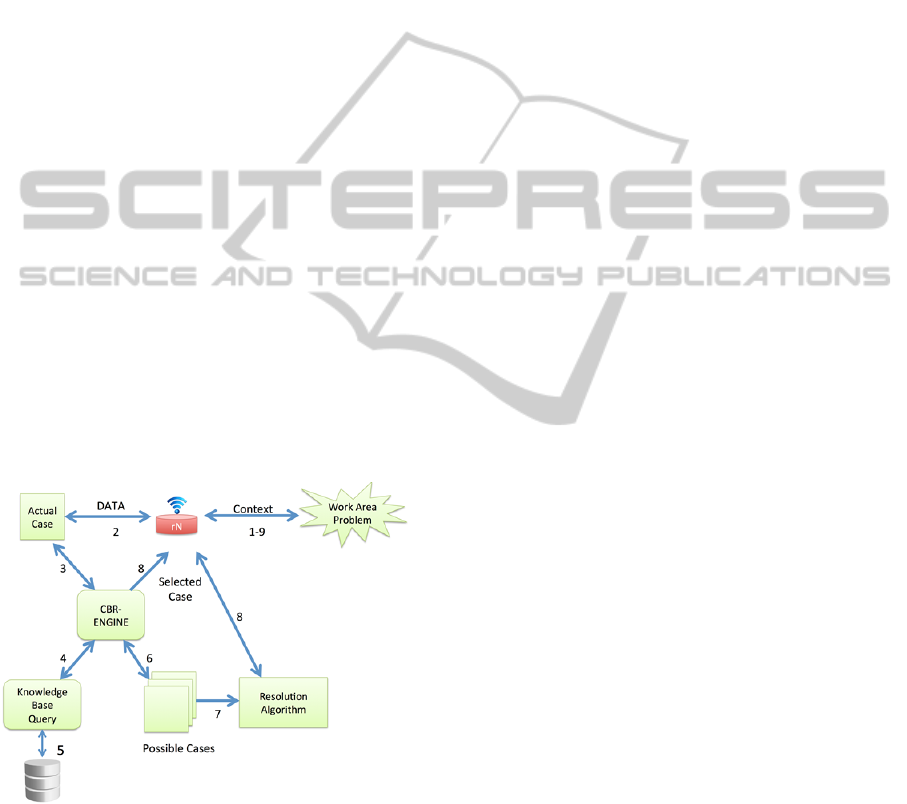
Since the Lego kit is not capable of reaching
SIR_CORE through HTTP an additional level of
abstraction was added which makes this
implementation of SIR_ROBOT a 2-tiered
application. The uppermost tier (android phone)
provides the means of complying with mandatory
requirement of SIR: reaching SIR_CORE over
HTTP RESTful requests. Additionally, this tier
parses the response and communicates the actions
over serialized objects via Bluetooth 2.0 to the
LeJOS firmware and vice versa. A Linksys 100Mbit
router is being use as access point between the
android terminal and the SIR_CORE.
4.2 Wireless Network Capabilities
RESTFul requests add an additional abstraction
layer over hardware and network communications to
maximize software reuse and tolerance to hardware
variability at the expense of additional latency. The
feasibility of this architecture in terms of network
resources consumption is being estimated on current
Wi-Fi standards like IEEE 802.11n (IEEE, 2009)
and projected to state of the art Gigabit Wireless
estimations (Kneckt et al., 2011). For cases where
response times are critical, it is being considered to
enhance the SIR_ROBOT with an additional tier that
handles certain self-preservation behaviours that do
not depend of RESTful requests to the server.
(López De Luise et al., 2010).
Figure 4: The SIR Cycle.
5 CONCLUSIONS
The objective of the SIR project is to design and
implement software architecture that allows n
service robotic agents that rely on diverse hardware
implementations and capabilities to interact with an
inference SaaS platform (SIR_CORE) to perform
different tasks.
This paper presents the rationale upon which the
SIR project was designed. Along with its strengths
and weaknesses and the proposals for enhancing the
former and mitigating the latter. Additionally, Figure
4 show how the SIR architecture fits n robotic agents
into the CBR cycle with minimum hardware
requirements by relying in State of The Art SaaS and
WebServices communication protocols and existing
an network infrastructure.
6 FUTURE WORK
Activities planned for Q3, Q4 2012 and Q1 2013
include the implementation of the SIR_CORE basic
architecture, assembly of two distinct SIR_ROBOT
implementations to follow basic cases from a unique
SIR_CORE Service, latency and stress tests using
802.11b, g, n and public 3G cellular networks.
REFERENCES
Aamodt, A. and Plaza, E. (1994) 'Case-Based Reasoning:
Foundational Issues, Methodological Variations, and
System Approaches', AI Communications, 39-59.
Aamodt, A., Sandtorv, H. A. and Winnem, O. M. (1998)
'Combining Case Based Reasoning and Data Mining -
A way of revealing and reusing RAMS experience ',
Safety and Reliability; Proceedings of ESREL ’98 ,
Balkena, Rotterdam, 1345-1351.
Amit, K. (2000) Artificial Intelligence and Soft Computing
Behavioral and cognitive modeling of the human
brain, 1
st
edition, CRC Press.
Bagnall, B. (2011) Intelligence Unleashed: Creating
LEGO NXT Robots with Java, 1
st
edition, Variant
Press.
Berners Lee, T., Fielding, R. and Frystyk, H. (1996) RFC-
1945 Hypertext Transfer Protocol -- HTTP/1.0, May,
[Online], Available: http://tools.ietf.org/html/rfc1945
[14 may 2012].
Blanzieri, E. and Ricci, F. (1999) 'Probability Based
Metrics for Nearest Neighbor. Classification and Case-
Based Reasoning', ICCBR '99 Proceedings of the
Third International Conference on Case-Based
Reasoning and Development, London, 14-28.
Cengeloglu, Y., Khajenoori, S. and Linton, D. (1994) 'A
Framework for Dynamic Knowledge Exchange
Among Intellingent Agents', Symposium Control of
the Physical World by Intelligent Agents, New
Orleans, LA, USA, 11-18.
Cunningham, P. (2009) 'A Taxonomy of Similarity
Mechanisms for Case-Based Reasoning', Knowledge
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
490

and Data Engineering, IEEE Transactions on, vol. 21,
no. 11, Nov, pp. 1532-1543.
Fielding, R.T. (2000) Architectural Styles and the Design
of Network-based Software Architectures, Irvine:
University Of California, Irvine.
García Armada, E., Jiménez, M. A., González de Santos,
P. and Armada, M. (2007) 'The Evolution of Robotics
Research: From Industrial Robotics to Field and
Service Robotics', IEEE Robotics and Automation
Magazine, vol. 14, no. 1, March, pp. 90-103.
Gerkey, B. P., Vaughan, R. T. and Howard, A. (2003) 'The
Player/Stage Project: Tools for Multi-Robot and
Distributed Sensor Systems', In Proceedings of the
11th International Conference on Advanced Robotics,
317-323.
Gindre, F., Trejo Pizzo, D. A., Barrera, G. M. and López
De Luise, M. D. (2010) 'A Criterion-based Genetic
Algorithm Solution to the Jigsaw Puzzle NP-Complete
Problem', Lecture Notes in Engineering and Computer
Science , 367-372.
Goodrich, M. and Tamassia, R. (2005) Data Structures
and Algorithms in Java, 4
th
edition, Wiley.
Google (2012) Android Developers, 14 may, [Online],
Available: http://developer.android.com/index.html
[14 may 2012].
IEEE (2009) IEEE Standards Association - 802.11n,
[Online], Available: http://standards.ieee.org/findstds/
standard/802.11n-2009.html [14 may 2012].
ISRD Group (2005) Introduction to Database
Management Systems, Tata McGraw-Hill Education.
json.org (2006) ietf.org, july, [Online], Available:
http://www.ietf.org/rfc/rfc4627.txt?number=4627 [14
may 2012].
Kneckt, J., Alanen, O., Zheng, C., Huovinen, T. and
Nihtila, T. (2011) 'IEEE 802.11ac: Enhancements for
very high throughput WLANs', International
Symposium on Personal Indoor and Mobile Radio
Communications (PIMRC), Helsinki, Finland, 849-
853.
Kolodner, J. (1992) 'An introduction to case-based
reasoning', Artificial Intelligence Review, vol. 6, no. 1,
march, pp. 3-34.
López De Luise, M. D., Barrera, G. and Iglesias, J. J.
(2010) 'An autonomous robot prototype using Concept
Learning model', Lecture Notes in Engineering and
Computer Science , Buenos Aires, 547-550.
LAAS-CNRS (2012) Open Robots, 13 august, [Online],
Available: http://www.openrobots.org/ [13 august
2012].
Lego (2012) Lego, 14 may, [Online], Available:
http://mindstorms.lego.com/en-us/Default.aspx [14
may 2012].
Mallet, A., Kanehiro, F., Fleury, S. and Herrb, M. (2007)
'Reusable Robotics Software Collection', Proceedings
of Second Int. Workshop on Software Development
and Integration in Robotics, Roma.
Mohan, Y. and Ponnambalam , S., (2009) 'An Extensive
Review of Research in Swarm Robotics', Nature &
Biologically Inspired Computing, 2009. NaBIC 2009.
World Congress on, Coimbatore, India, 140-145.
Nesnas, I. D., Simmons, R., Gaines, D., Kunz, C., Diaz-
Calderon, A., Estlin, T., Madison, R., Guineau, J. and
McHenry, M. (2006) 'CLARAty: Challenges and
Steps Toward Reusable Robotic Software',
International Journal of Advanced Robotic Systems,
vol. 3, no. 1, March, pp. 23-30.
Padhy, Rabi, Prasad, Patra, Ranjan and Satapathy , ,
(2011) 'RDBMS to NoSQL: Reviewing Some Next-
Generation Non-Relational Database's', International
Journal Of Advanced Engineering Sciences And
Technologies , vol. 11, no. 1, September, pp. 15-30.
Patterson, D. and Fox, A. (2012) Engineering Long-
Lasting Software: An Agile Approach Using SaaS and
Cloud Computing, Alpha Edition edition, Strawberry
Canyon LLC.
Portinale, L. and Montani, S. (2008) 'A Fuzzy Logic
Approach to Case Matching and Retrieval Suitable to
SQL Implementation', Tools with Artificial
Intelligence, 2008. ICTAI '08. 20th IEEE International
Conference on, Dayton, 241-245.
Reisbeck, C. K. and Shank, R. C. (1989) Inside Case-
Based Reasoning, 1
st
edition, Hillsdale: Lawrence
Erlbaum Associates.
Russell, R. and P, N. (2003) Artificial Intelligence: A
Modern Approach, 2
nd
edition, Upper Saddle River:
Prentice Hall.
W3 Consortium (2012) W3C, 24 january, [Online],
Available: http://www.w3.org/XML/ [14 may 2012].
Walker, D. (2007) Similarity Determination And Case
Retrieval In An Intelligent Decision Support System
For Diabetes Management, Russ College of
Engineering and Technology of Ohio University.
Watson, I. and Marir, F. (1994) 'Case-Based Reasoning: A
Review', The Knowledge Engineering Review, vol. 9,
no. 4, October, pp. 355-381.
Multi-agentCase-basedReasoningInferenceEngineProposalforReusableRobotics
491
