
AAL-Oriented TOF Sensor Network for Indoor Monitoring
Giovanni Diraco, Alessandro Leone and Pietro Siciliano
Institute for Microelectronics and Microsystems, Italian National Research Council (CNR)
Via Monteroni, c/o Campus Università del Salento - Palazzina A3, Lecce, Italy
Keywords: Time-of-Flight Sensor, Sensor Network, Indoor Monitoring, Event Detection, Ambient Assisted Living.
Abstract: One distinctive feature of ambient assisted living-oriented systems is the ability to provide assistive services
in smart environments as elderly people need in their daily life. Since Time-Of-Flight vision technologies
are increasingly investigated as monitoring solution able to outperform traditional approaches, in this work a
monitoring framework based on a Time-Of-Flight sensor network has been investigated with the aim to
provide a wide-range solution suitable in several assisted living scenarios. Detector nodes are managed by a
low-power embedded PC to process Time-Of-Flight streams and extract features related with person’s
activities. The feature level of detail is tuned in an application-driven manner in order to optimize both
bandwidth and computational resources. The event detection capabilities were validated by using data
collected in real-home environments.
1 INTRODUCTION
During the last years, the interest of scientific
community for smart environments has grown very
fast especially gained from the European Ambient
Assisted Living (AAL) program aiming to increase
the quality of life of older people by helping them to
live more independently and longer at their homes.
Moreover, smart environments present new
criticalities: 1) devices and applications are often
isolated or proprietary, preventing the effective
customization and reuse; 2) traditional monitoring
systems are strongly dependent from ambient
conditions and/or invasive. The answare to the first
criticality comes from the use of AAL-oriented
middleware acting as a flexible intermediate layer
able to adapt to evolving requirements and
scenarios. AAL middleware architectures have been
described, among others, by (Wolf et al., 2010) and
by (Schäfer, 2010). Concerning the second
criticality, recently TOF (Time-Of-Flight) sensors
have been increasingly investigated as solutions
being able to overcome drawbacks affecting
traditional cameras (included the privacy issue).
(Wientapper et al., 2009) described a model-free
approach for classifying human postures in TOF
images. The usage of cheaper (non-TOF) 3D sensors
have been recently reported especially for fall
detection application (Mastorakis, 2012). However
non-TOF 3D sensors estimate distances from the
distortion of an infrared light pattern projected on
the scene, and so their accuracy and distance range
result seriously limited (distance up to 3-4 m with 4
cm accuracy) (Khoshelham, 2011). This paper
presents a novel event detection solution for elderly
monitoring in smart environments composed by a
TOF SN (Sensor Network) and an application-
driven processing architecture integrated within an
AAL-oriented middleware infrastructures.
2 SYSTEM ARCHITECTURE
The SN topology includes M detector nodes
managing N TOF sensor nodes for each, and one
coordinator node that receives high-level reports
from the detectors. TOF sensors (Figure 1.a) and
embedded PCs (Figure 1.b), managing coordinator
and detector nodes, are low-power, compact and
noiseless devices, in order to meet typical
requirements of AAL applications. The
computational framework is conceived as a modular,
distributed and open architecture implemented by
coordinator and detector nodes, and integrated into a
larger AAL system through open middleware.
Figure 1.c shows sixteen sample TOF frames of the
collected dataset in real home environments. The
typical apartment is shown in Figure 1.d with the
236
Diraco G., Leone A. and Siciliano P..
AAL-Oriented TOF Sensor Network for Indoor Monitoring.
DOI: 10.5220/0004253202360239
In Proceedings of the 2nd International Conference on Sensor Networks (SENSORNETS-2013), pages 236-239
ISBN: 978-989-8565-45-7
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

Figure_1: a) MESA SR-4000 TOF sensor; b) Intel Atom
Processor-based Embedded PC managing the detector
nodes and the coordinator node; c) Some TOF frames
collected in real homes; d) Plan of the apartment used for
data collection with the indication of performed actions
(from 1 to 11) and sensor positions (S1, S2, S3).
Figure_2: Conceptual representation of the computational
framework: a) Detector node, b) Coordinator node, c)
System Manager.
locations (from 1 to 11) in which actions have been
performed. The sensor network used during
experiments included three sensor nodes, S1 in the
bedroom, and S2 and S3 in the living room with
overlapping views. The Figure 2 shows the overall
architecture of the computational framework. There
are three main logical layers: Data Processing
Resource, Sensing Resource and System Manager.
Data Processing Resource layers are implemented
by both the detector nodes (Figure 2.a) and the
coordinator node (Figure 2.b). The detector nodes
implement, in addition, the Sensing Resource layer.
The coordinator includes architectural modules for
detector nodes management (control and data
gathering), high-level data fusion, inter-view event
detection and context management. The System
Manager (Figure 2.c) manages the whole AAL
system. It is inspired to OpenAAL (Wolf, 2010), that
is an open distribution of the UniversAAL (2012)
middleware, achieving global AAL services’ goals.
The sensing node is represented by the MESA
SwissRanger SR-4000 (MESA Imaging AG, 2011),
a state-of-the-art TOF sensor with compact
dimensions (65×65×68 mm), noiseless functioning
(0 dB noise), QCIF resolution (176×144 pixels),
long distance range (up to 10 m) and wide (69°×56°)
FOV (Field-Of-View). The pre-processing module
includes functionalities to perform the extrinsic
calibration (wall-mounting self-calibration), fuse
together range data gathered from overlapping views
and identify a person into range data. A cascade of
well-known vision processing steps, namely
background modelling, segmentation and people
tracking, is implemented according to a previous
authors’ study (Leone, 2011). Finally, a middleware
module plugs in the TOF sensors into the system
providing also a semantic description of acquired
range data.
The detector data processing resource includes the
following modules: feature extraction, posture
recognition, and intra-view event detection. Features
are extracted from TOF range data by using two
body descriptors having different level of detail and
computational complexity. Coarse grained features
are extracted by using a volumetric descriptor that
exploits the spatial distribution of 3D points
represented in cylindrical coordinates (h, r, θ)
corresponding to height, radius and angular locations
respectively. The 3D points are grouped into rings
orthogonal to and centred at the h-axis while sharing
the same height and radius, as depicted in Figure 3.a.
The volumetric features are represented by the
cylindrical histogram shown in Figure 3.b obtained
by taking the sum of the bin values for each ring.
Fine grained features are achieved, instead, by using
a topological representation of body information
embedded into the 3D point cloud. The intrinsic
topology of the body shape is graphically encoded
by using the Discrete Reeb Graph (DRG) proposed
by (Xiao et al., 2004). The DRG is extracted by
subdividing the geodesic map (Figure 3.c) in regular
level-sets and connecting them on the basis of an
adjacency criterion as described by (Diraco et al.,
2011) that suggest also a methodology to handle
self-occlusions (due to overlapping body parts). The
AAL-OrientedTOFSensorNetworkforIndoorMonitoring
237
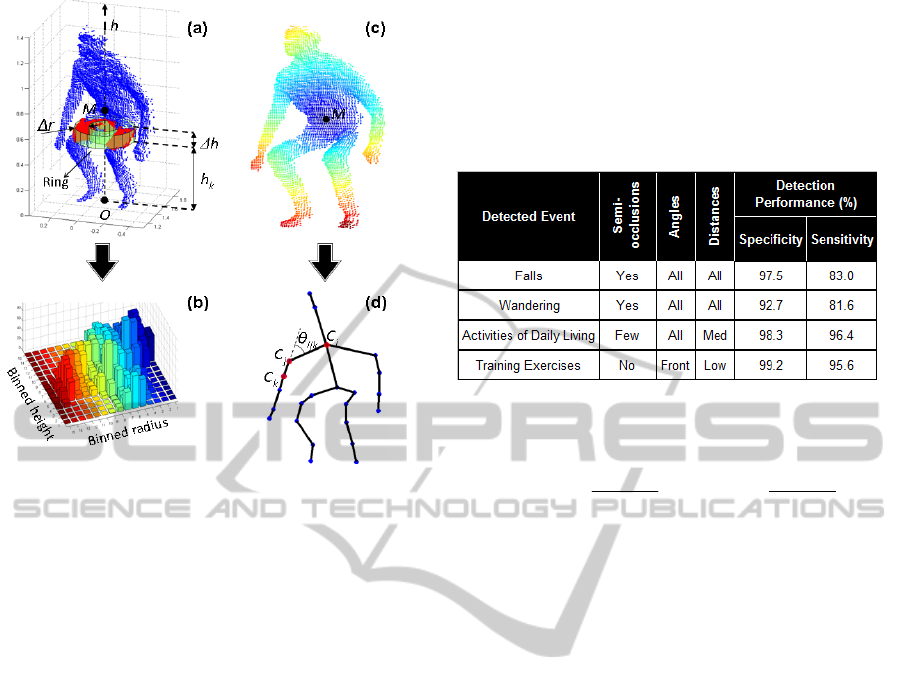
Figure_3: a) Volumetric representation of body 3D point
cloud. b) Cylindrical histogram features extracted from the
volumetric representation. c) Geodesic map (near points
are blue, far red). d) Extracted Reeb graph features.
DRG-based features are shown in Figure 3.d. The
topological descriptor includes DRG nodes and
related angles. Given the coarse-to-fine features
extracted as previously discussed, a multi-class
formulation of the SVM (Support Vector Machine)
classifier (Debnath, 2004) based on the one-against-
one strategy is adopted to classify the person’s
postures. The coordinator data processing resource
includes the following functional modules: detector
nodes management, data fusion, inter-view event
detection and context management. Human actions
are recognized by considering successive postures
over a time period. Instead, global events are
recognized by using Dynamic Bayesian Networks
(DBNs) specifically designed for each application
scenario, following an approach similar to (Park and
Kautz, 2008).
3 EXPERIMENTAL RESULTS
The event detection performance was evaluated in
real home environments by involving ten healthy
subjects, 5 males and 5 females, having different
physical characteristics: age 31±6 years, height
173±20 cm, weight 75±22 kg. Four relevant AAL
application scenarios have been considered, namely
fall detection, wandering detection, ADLs
(Activities of Daily Living) recognition and training
exercises recognition. One dataset for each scenario
was collected and characterized by different
combinations of occlusions, angles and distances as
reported in Table 1 by the first four columns.
Table 1: Detection performance of four event classes.
The last two columns report the achieved detection
performance in terms of specificity and sensitivity
measures defined as follows:
FPTN
TN
ySpecificit
,
FNTP
TP
ySensitivit
,
where TP, TN, FP, FN stand for True Positive, True
Negative, False Positive and False Negative,
respectively. Concerning the fall detection scenario,
falls have been correctly discriminated from non-
falls even in presence of semi-occlusions, achieving
97.5% and 83% of specificity and sensitivity,
respectively. However, since fall events were
detected by single detector nodes, ambiguous
situations such as those in which a fall was located
between non-overlapping views (i.e. location 4 in
Figure 1.d) given rise to false negatives. The
wandering activity was detected by the coordinator
since it normally involves several non-overlapping
views (i.e. sensors in different rooms). Wandering
was discriminated from ADLs with 92.7% and
81.6% of specificity and sensitivity, respectively. A
low level of feature detail was involved for fall
detection with prevalent adoption of the volumetric
representation, instead in the case of wandering
detection a slightly higher detail level was needed
with a moderate use of topological representation. In
order to evaluate the ADLs recognition capability,
the following seven kind of activities were
performed: sleeping, waking up, eating, cooking,
housekeeping, watch TV and physical training.
ADLs were recognized with 98.3% and 96.4% of
specificity and sensitivity, respectively. A moderate
misclassification was observed for housekeeping
activities since occasionally were erroneously
recognized as wandering state. For the physical
training scenario, a virtual trainer was developed
instructing participants to follow a physical activity
SENSORNETS2013-2ndInternationalConferenceonSensorNetworks
238

program and perform the recommended exercises
correctly. The recommended physical exercises were
of the following kind: biceps curl, squatting, torso
bending, etc. The involved feature detail level was
high with prevalent use of the topological
representation. Performed exercises were correctly
recognized achieving 99.2% and 95.6% of
specificity and sensitivity, respectively. The most
computationally expensive steps were pre-
processing, feature extraction, and posture
classification. They were evaluated in terms of
processing time that was constant for pre-processing
and classification resulting respectively in 20 ms and
15 ms per frame. The volumetric descriptor taken an
average processing time of about 20 ms,
corresponding to about 18 fps (frame-per-second).
The topological approach, on the other hand,
required a slightly increasing processing time among
hierarchical levels from an average value of 40 ms to
44 ms due to the incremental occurrence of self-
occlusions, achieving up to 13 fps.
4 CONCLUSIONS
The main contribution of this work is to design and
evaluate a unified solution for TOF SN-based in-
home monitoring suitable for different AAL
application scenarios. An open (OpenAAL inspired)
computational framework has been suggested able to
classify a large class of postures and detect events of
interest accommodating easily (i.e. with self-
calibration), at the same time, wall-mounting sensor
installations more convenient to cover home
environments avoiding large occluding objects.
Moreover, the suggested computational framework
was optimized and validated for embedded
processing to meet typical in-home application
requirements, such as low-power consumption,
noiselessness and compactness. The system was able
to adapt effectively to four different AAL scenarios
exploiting an application-driven multilevel feature
extraction to reliably detect several relevant events
and overcoming, at the same time, well-known
problems affecting traditional monitoring systems in
a privacy preserving way. The ongoing work
concerns the on-field validation of the system that
will be deployed in elderly dwellings at support of
two different ambient assisted living scenarios
concerning the detection of dangerous events and
abnormal behaviours.
ACKNOWLEDGEMENTS
The presented work has been carried out within the
BAITAH project funded by the Italian Ministry of
Education, University and Research (MIUR).
REFERENCES
Debnath R., Takahide N., Takahashi H., 2004. A decision
based one-against-one method for multi-class support
vector machine. Pattern Analysis and
Applications;7(2):164-175.
Diraco, G., Leone, A., Siciliano, P., 2011. Geodesic-based
human posture analysis by using a single 3D TOF
camera. In: Proc of ISIE;1329-1334.
Fuxreiter, T., Mayer, C., Hanke, S., Gira, M., Sili, M.,
Kropf, J., 2010. A modular platform for event
recognition in smart homes. In: 12th IEEE
Healthcom;1-6.
Khoshelham, K., 2011. Accuracy analysis of Kinect depth
data. In: Proc of ISPRS Workshop on Laser Scanning.
Leone, A., Diraco, G., Siciliano P., 2011. Detecting falls
with 3D range camera in ambient assisted living
applications: a preliminary study. Med Eng
Phys;33(6):770-81.
Li, W., Zhang, Z., Liu, Z., 2010. Action recognition based
on a bag of 3D points. In: Proc of CVPRW;9-14.
Mastorakis, G., Makris, D., 2012. Fall detection system
using Kinect’s infrared sensor. J Real-Time Image
Proc;1-12.
MESA Imaging AG, 2011. SR4000 Data Sheet Rev.5.1.
<http://www.mesa-imaging.ch>.
Park, S., Kautz, H., 2008. Privacy-preserving recognition
of activities in daily living from multi-view silhouettes
and RFID-based training. In: AAAI symposium on AI
in eldercare, Arlington, Virginia USA.
Schäfer, J., 2010. A Middleware for Self-Organising
Distributed Ambient Assisted Living Applications. In:
Workshop Selbstorganisierende, Adaptive,
Kontextsensitive verteilte Systeme (SAKS).
UniversAAL project 2012. http://www.universaal.org/.
Wientapper, F., Ahrens, K., Wuest, H., Bockholt, U.,
2009. Linear-projection-based classification of human
postures in time-of-flight data. In: Proc of
ICSMC;559-564.
Wolf, P., Schmidt, A., Parada Otte, J., Klein, M.,
Rollwage, S., Koenig-Ries, B., Dettborn, T.,
Gabdulkhakova, A., 2010. openAAL - the open source
middleware for ambient-assisted living (AAL). In:
AALIANCE conference, Malaga, Spain.
Won-Seok, C., Yang-Shin, K., Se-Young, O., Jeihun, L.,
2012. Fast iterative closest point framework for 3D
LIDAR data in intelligent vehicle. In: IEEE Intelligent
Vehicles Symposium (IV);1029–1034.
Xiao, Y., Siebert, P., Werghi, N., 2004. Topological
segmentation of discrete human body shapes in
various postures based on geodesic distance. In: Proc
of ICPR 2004;3:131-135.
AAL-OrientedTOFSensorNetworkforIndoorMonitoring
239
