
An Agent-based Model of Autonomous Automated-Guided Vehicles
for Internal Transportation in Automated Laboratories
Lluís Ribas-Xirgo and Ismael F. Chaile
Department of Microelectronics and Electronic Systems, School of Engineering
Universitat Autònoma de Barcelona, Bellaterra, Catalunya, Spain
Keywords: Agent-Based Modelling, Mixed-Reality Environments, Multi-Agent Systems, Physical Agents.
Abstract: Agent-based modelling enables simulating complex systems and controlling them, as well. In the industrial
domain there are plenty of these systems not only because of the size but also because of the need for fault-
tolerance and adaptability. Typically, these cases are solved by dividing systems into different dimensions,
including the transportation one. In this paper, we take this approach to build a framework to develop and
control transportation in applications within the industrial domain, which will be tested on an automated
laboratory. The framework is based on a multi-agent simulator that contains the model of the plant with
transportation agents having a multi-layered architecture. The lower-level layers correspond to those that
would be embedded into physical transportation agents. Therefore, while agents communicate to each other
within the simulator environment, communication between upper-level layers and lower-lever layers of each
agent is done internally for the simulated parts and externally for the real counterparts. The simulator can be
used stand-alone to functionally validate a system or in combination with real agents as a
monitoring/controlling tool. Preliminary results prove the viability of the framework as a design tool and
show the difficulties to work with physical agents.
1 INTRODUCTION
The industrial domain is populated with highly
complex and demanding applications that also are
required to be flexible and robust. Therefore, it has
become commonplace to use divide-and-conquer
strategies to develop the systems for these appli-
cations. For instance, splitting system designs with
respect to different aspects of the application, which
include the one for internal transportation of material
(Schreiber and Fay, 2011).
In this paper, we focus on this aspect to develop
a framework in which transport systems for
applications in the industrial domain can be designed
and further deployed.
These systems are also required to be as efficient
as possible. Taking into account that efficiency must
include cost of failures and planning changes, it
turns out that a robust and flexible system has more
chances to be more globally efficient that others that
lack these characteristics, possibly because of being
centrally controlled. Following this and other similar
reasonings, industry has turned to use agents and
agent technology to obtain fault-tolerant and
adaptable systems.
Our approach resembles that of (Fernández-
Caballero and Gascueña, 2009) on complete
development environments for agent-based systems
and uses an agent-based model (ABM) of the
transport system that accepts inputs from the rest of
the system and outputs control data for the physical
transportation units as well as other data to the
system. Differently from their proposal and other
works alike, our approach uses a single ABM tool to
simplify the development framework and minimize
the development costs.
The proposed ABM has a relatively simple
architecture (see Fig. 1), that organizes agents into
two classes: the one for the external elements
(application-related agents, A
j
) to the transportation
system and the one for the vehicles or taxis (agents
T
i
with links to physical, R
i
, and virtual, V
i
, lower-
level layers).
The model is run under inputs that come from
external agents and physical elements and generates
outputs for the latter ones. This control loop might
be too slow for many applications unless physical
262
Ribas-Xirgo L. and Chaile I..
An Agent-based Model of Autonomous Automated-Guided Vehicles for Internal Transportation in Automated Laboratories.
DOI: 10.5220/0004257702620268
In Proceedings of the 5th International Conference on Agents and Artificial Intelligence (ICAART-2013), pages 262-268
ISBN: 978-989-8565-38-9
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

elements have embedded some controllers and
relation with the ABM is done at a higher level of
abstraction. However, even with this solution, ABM
has to be executed fast enough to interact at real
time with the physical elements. This requires agents
to be efficient in taking decisions, which usually
goes against relexive, ellaborated behaviours and to
have simple communication protocols that enable
negotiations to occur within a few messages.
In the proposed framework, the model has three
use cases: 1) for functional validation; 2) for plant
characterization, which includes testing whether real
time requirements are met, parameter identification,
and controller setup, and 3) as a model for the
controller of the transportation system, including a
mixed-reality environment for monitoring and
supervising in human-assisted operation.
As the framework could not be tested on a real
application, it has been tested with a realistic one
that could be operated with automated-guided
vehicles (AGVs) built on small robots.
For this, we have focused the work on automated
laboratories of clinical analyses, as they use
relatively simple transport infrastructures in which
small AGVs can successfully replace conveyors.
The paper is organized as follows. The next
section is devoted to outline the used of agent-based
models in the transportation arena and our approach.
Section 3 highlights the application in automated
laboratories, while the following sections detail the
mechanisms for plant characterization and
synchronization between the simulator and the real
world. The last section concludes this paper by
summarizing the contribution of our work and
devising short and long term continuation lines.
Figure 1: Multi-agent architecture of the transportation
system.
2 AGENT-BASED MODELLING
Typically, ABM is used to analyze, via simulation,
social behaviour of individuals and how it is affected
by changes on individual behaviour, as presented,
for instance, by Kashif et al. (2011). Additionally,
ABMs can be taken as systems models and used to
control them by generating the commands to the
individuals so that they behave as required by the
related applications.
2.1 ABMs as System Simulators
In the review of ABM for transport logistics done by
Davidsson et al. (2005) it is noted that agents are
used mainly to support decision taking but not to
automate processes, i.e. not as distributed system
controllers.
In fact, as shown in a more recent review by
Santa-Eulalia, Halladjian, D’Amours, and Frayret
(2011), agents are used to distribute the problem into
its participants, which collaborate to solve their local
problems. Although this review applies to supply
chain management, conclusions can be extended to
the study case on automated laboratories, as they
have to be supplied with samples and sample
ordering and distribution has to be solved.
In Armendáriz et al. (2011), a business model on
a carpooling application is created upon an ABM. In
this model, passengers can share cars that move
autonomously in a network with independent traffic
lights and local conflict solving at intersections. This
model can only be successful if users are matched to
the right cars in real-time. Similarly, in automated
laboratories, samples should be grouped so that each
group may follow the same minimal route.
2.2 ABMs as System Controllers
Most applications require be implemented with
systems able to work with dynamically changing
demands, and transportation systems are not an
exception. The paper by De Wolf and Holvoet
(2003) follows the same reasoning and, as other
authors, state that systems should be transformed
into autonomic ones to cope with complexity.
In autonomic systems, components tell others
what they want and not how to attain the
corresponding goals. Following this principle, the
automated laboratory for the study case is divided
into two parts: the one of the transportation and the
one for the application, which tells the first one what
is needed but no how it must be fulfilled.
AnAgent-basedModelofAutonomousAutomated-GuidedVehiclesforInternalTransportationinAutomatedLaboratories
263
De Wolf and Holvoet (2003) propose using
ABM to build a model of the system and include one
module to analyze de dynamics of the system (in our
case, this module is in charge of measuring
differences between expected behaviour and sensed
one) and another to control the rest of the system (in
our case, the physical agents which are controlled by
their virtual counterparts). Additionally, cost
functions have to be measured with respect to model
parameters so they can be adjusted to keep
efficiency at the desired reference level. This is a
top-level controller built on top of local, agent
controllers. (We have not planned to include such a
top-level controller because of the relative simplicity
of the case study.)
The main problem to use ABM as a controller is
that ABM can run in real time with the physical
requirements of the system and its application.
2.3 ABM to Control Traffic in
Transportation Systems
Systems of agents have already been used to control
traffic. The idea is to have a traffic system that can
be self-regulated from individual choices and that
requires as little assistance as possible from agents at
a higher level of hierarchy. In other words, the idea
is that transport orders from the applications are
handled by transportation agents in an autonomous
manner, with minimal information from other
agents, including those who may act as planners and
routers.
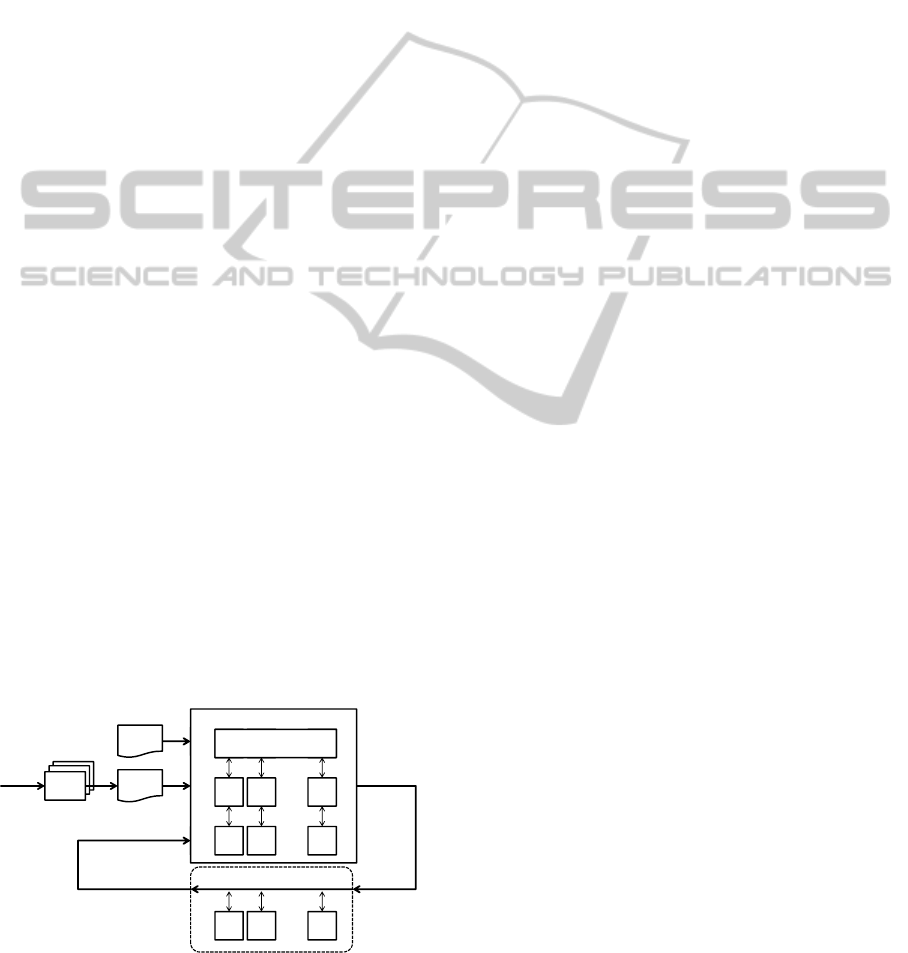
Fig. 2 illustrates how this control scheme is
organized. Topology of the plant and the number of
transportation agents (here and after referred to as
taxis) are among the variables that configure the
model that is used for controlling the real plant.
The higher level modules of the taxis ({T
i
}) get
orders from agents that represent other modules of
the application ({A
j
}) and try to fulfil them.
Figure 2: Architecture of an ABM controller.
To do so, taxis must negotiate with application
agents {A
j
} and other workmates which jobs they
take and, when in transit, how can they be done in
the more efficient way. In taking the decisions, taxis
have knowledge of their own state and the state of
their lower-level counterparts ({V
i
}). Results of
deliberations are transformed into requests to the
{V
i
} and also to the real robots {R
i
}. The last set of
requests is, in fact, the output of the ABM controller.
And the inputs include the replies to these requests
from robots, hence closing the loop between the
controller and the controlled system.
Note that the variability of incoming orders
increases the complexity of a central planner and/or
a traffic coordinator thus making it difficult to attain
any gain in cost or throughput. Consequently, the
taxis operate autonomously, with less guarantee of
optimality but with the benefits of this mode of
operation with respect to flexibility and robustness.
3 AUTOMATED LABORATORIES
Laboratories of clinical analyses have progressively
been transformed into complex “manufacturing”
facilities, able to produce thousands of analyses per
hour from blood and other body fluids’ samples.
In these facilities, samples are dropped into tubes
that are placed in racks which are delivered to
different analyzing machines by using a conveyor
system (Ribas-Xirgo, Miró-Vicente, Chaile and
Velasco-González, 2012).
Unfortunately, some tests done by analyzers
have to be repeated, not all racks have to stop at the
same analyzers and there can be several analyzers
which can do the same job, though with different
workload capacities.
As a result, the complexity of managing this kind
of laboratories is quite high, even though the use of
conveyors sets some layout constraints to the
transport systems thus limiting it. Things can go
worse when conveyors are replaced with agent-
based AGVs (automated-guided vehicles), as they
have more degrees of freedom.
However, the choice for autonomous AGVs
relieves the plant planner from operating with lots of
data and makes it possible to obtain optimal
transport orders, which will be taken by AGVs.
Additionally, the MAS-based transport gains
flexibility and robustness.
In the following, we shall explain the details
about the layout of the plant and the behavior of the
AGVs for the study case selected to validate our
development and deployment framework.
E(plantmodel)
T
1
ABM
application
{topology,#taxis,...}
T
1
T
2
T
n
Realplant
V
1
V
2
V
n
orders
A
1..k
A
1..k
A
1..k
...
...
V
1
V
2
V
n
E(plantmodel)
config
R
1
R
2
R
n
...
{answers }
{requests }
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
264

3.1 Plant
To include most of the characteristics of actual
plants of automated laboratories, the case study
includes four different analyzers: one ion-counting
unit, one coagulometry analyzer and two
biochemical units, as most of the samples require
measuring biochemical factors.
The layout of the plant (Fig. 3) is quite similar to
that of a conveyor system where conveyors are
replaced by autonomous AGVs, thus not requiring
much infrastructure. In this case, to simplify vehicle
operations, robots move around by following a line
with marks, which are used by AGVs to self-locate
within the plant map. In fact, they are used to
indicate a programming spot, a bifurcation or a
junction. The type of the mark is determined by
AGVs in accordance with their location in the plant.
The programming spots at the loading dock
(bottom left) and at the beginning of the return lane
(second to topmost and rightmost cross) are places
where the LIMS tell AGVs which kind of tests
should be done on the samples they carry and which
tests have been done successfully, respectively.
There is a re-circulating lane (middle line) that
can be used by AGVs that carry samples that wait
for acknowledgement of their tests or to repeat them,
in case the tests go wrong.
At the beginning of the returning lane (topmost
rightmost mark), AGVs have their tube racks
unloaded, and, at the waiting queue, they have their
batteries re-charged (if needed), and follow their
pace to the programming spot.
3.2 Transportation Agents
In the proposed system, samples are transported
from one point to another by robots, which are
intended to give the whole flexibility and fault-
tolerance, and to relieve the global controller from
most of the systems’ complexity in planning
(Himoff, Rzevski, Hinton and Skobelev, 2006).
As already indicated, the overall planning is done
by the LIMSs, which link samples and tests and,
subsequently, samples to sets of analyzers. These
data are used by taxis to determine their goals, i.e.
their destinations.
In Wojtusiak, Warden, and Herzog (2011) it is
shown that an evolutionary learning process to
optimize individual order selection and routing gives
best results that a greedy approach. However,
because of the simplicity of the case-study network
and that there are only one collection and one ending
spots, we have opted by implementing a greedy
approach with some learning from experience when
solving conflicts.
Each taxi features an AGV that is aware of its
own position, recognizes the environment and
communicates with others to coordinate their
movements. AGVs use information about the plant
to determine to which analyzer they should go to
satisfy the requirements of their loads the fastest
they can. Currently, in our model, AGVs randomly
choose from compatible goals, i.e. they can go to
either biochemical analyzer on a random basis, as
the focus of this work is about validating the
proposed ABM-based controller.
When an AGV arrives at its destination, it docks
at the port of the corresponding analyzer so that it
can begin with its work. In case it is busy, the taxi
puts itself on hold in a parking area (short wait) or
goes on to a compatible destination or to the re-
circulation lane (long wait).
In the model, the high-level of taxis {T
i
} is
responsible for telling the lower-levels, simulated
{V
i
} and real {R
i
}, what actions to do, and the low
levels to reply with data about the results of these
actions. Note that {T
i
} and {V
i
} are executed on an
ABM simulator while {R
i
} on the embedded
controllers of the robots of the system, i.e. on actual
AGVs. At present, the ABM is run on Netlogo and
the robots are Boebots from Parallax.
4 PLANT CHARACTERIZATION
Model accuracy depends on good characterization of
the actual plant. Static data such as traffic network
and nominal characteristics of vehicles such as
average speed and energy consumption can be used
for functional validation of the system and as a set of
initial values for the model. However, in order to
control a real plant, parameters should be as accurate
as possible so they have to be estimated from a
series of test runs.
Our model includes a mechanism for parameter
identification and updating that can be used for both
plant characterization and continuous model
adaptation.
To activate the mechanism, the model has to be
set to real-time mode instead of discrete mode. In
fact, this mode of operation is the only one possible
when working with actual taxis.
Plant characteristics are of two types: the ones
that define its traffic network and the ones that
define the functional and non-functional behaviour
of the taxis. We assume the traffic network be
constant and defined by a topological graph that is
known to all taxis of the system.
AnAgent-basedModelofAutonomousAutomated-GuidedVehiclesforInternalTransportationinAutomatedLaboratories
265

Figure 3: Plant layout from its simulator within Netlogo.
Each taxi tags the topological graph with data
related to the cost it takes to itself to get to a node or
to perform some action at a node.
In a simple version, the cost data consists of the
time to go from a node to another and the time
devoted at each node to decide which outgoing arc
to take.
For instance, the characterization of an arc for a
given taxi consists of measuring how long it takes to
travel from the origin to the destination. And the
characterization of the time required to perform an
action is done by measuring the time to complete it
after being requested to. Such measures are done
indirectly from messages between the ABM and the
physical part of the taxi.
For every order request from a T
i
to a R
i
, it is
recorded the delay time that takes to T
i
to get a reply
from R
i
. This delay is compared to the previous one
in the same node or arc of the map graph and
updated accordingly so that further decisions of T
i
and the reactive behaviour of V
i
are more accurate to
the reality. Note that the characterization is made at
every communication so taxis may end up by having
very different “views” of the traffic network and
behaving in a very different manner.
Other characteristics can be measured by the
robots and transmitted with the acknowledgement
messages but, in the first version of the proposed
model, these are not taken into account.
5 MIXED-REALITY
SIMULATION AND CONTROL
ENVIRONMENT
To accurately monitor any timing problem between
controller and real robots, and also when operating
with real robots in a mixed-reality environment,
messages from {R
i
} and {V
i
} have to be
synchronized.
In this section we shall explain the problems
of controlling real AGVs with an ABM and of
synchronizing the reality and the simulation.
5.1 Real-Time Monitoring
In real-time mode, all delays are compared to the
worst-case execution time (WCET) of the body of
the main control loop so to guarantee that no inputs
from the plant will be lost or taken into account out
of time. Therefore the control loop has a cycle
period only compatible with robots whose embedded
controllers can understand quite complex
instructions, with execution times larger than the
WCET of the model.
This is the usual case in transport systems with
lower-level parts of taxis executing actions such as
“go to the next landmark”, “take the next turning to
the right” or “dock at the machine pier”.
To prevent ABM from missing input data or
sending outdated orders, our model controls that all
measured delays go above 2 times the model WCET.
There are some alternatives to operate with
delays closer to the WCET such as including time-
stamps into the messages or minimizing it by
appropriately modifying the scheduling of agent
execution, as presented by Mathieu and Secq (2012).
However, they are not implemented because
experiments show that the previous rule is normally
satisfied.
For instance, a simulation of an ABM of the case
study with 20 AGVs gives a WCET of 16mS. When
operated with real robots, communication is
estimated (we have real data only for up to 4 robots)
to take an extra time of 20mS per control cycle. As a
consequence, the ABM controller can handle real
time at frequencies of 14 cycles per second.
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
266

This frequency implies that simulated ABM can
control 20 real robots {R
i
} with an spatial resolution
under the cm, which is acceptable for the laboratory
previously presented, even if working at 25% more
than the maximum throughput of the top current
analyzers (8000 tests/hour). Note that marks and
objects are more than one cm away from each other.
5.2 Synchronization with Reality
The view of the model enables creating a mixed-
reality environment in which it is possible to design,
supervise and control transport systems of
applications.
As already explained, the model records the
actual delays between requests from T
i
and
corresponding acknowledgements from R
i
, but also
compares them to the delays from V
i
.
For every request-ack. pair between T
i
and {R
i
,
V
i
}, if the actual delay is longer, the view of the
corresponding agent remains stand still until the time
gap is covered. On the other side, if the real delay is
shorter than the expected one, the view is updated
for the missed, un-simulated time. This fact implies
that the WCET must be twice as short as the shortest
delay so that these extra periods required by the
simulator to synchronize virtual robots to their
physical counterparts do not cause any loss in inputs
from the actual plant. Therefore this synchronizing
mechanism works fine only if the control loop
period is shorter than half the delays to be measured.
6 CONCLUSIONS
In this work we have focused on the internal
transportation aspect of systems that run applications
on the industrial domain and proposed a framework
to design and deploy the corresponding subsystems.
The framework uses an ABM simulator as a key
tool that is used in the following cases: 1) for
functional validation; 2) for plant characterization,
which includes testing whether real time
requirements are met, parameter identification, and
controller setup, and 3) as a model for the controller
of the transportation system, including a mixed-
reality environment for monitoring and supervising
in human-assisted operation.
We have shown that the higher levels can be
simulated and, thus, verified in a straithforward
manner and that it is possible to synchronize the
model execution with the real plant to use it as an
actual controller.
Preliminar results show that the proposed
strategy minimizes the time-to-prototype as the
development platform is the same that the
deployment one.
In the near future we expect to have complete
experimental results on real-time control with this
framework and to develop strategies to solve
synchronization conflicts when simulation and
reality differ.
REFERENCES
Armendáriz, M., Burguillo, J.C., Peleteiro, A., Arnould,
G., Khadraoui, D. (2011). Carpooling: A multiagent
simulation in Netlogo. In Proc. of the 25th European
Conf. on Modelling and Simulation (ECMS), Krakow
(Poland).
Davidsson, P., Henesey, L., Ramstedt, L., Törnquist, J.,
Wernstedt, F. (2005). An analysis of agent-based
approaches to transport logistics. In Transportation
Research Part C 1. 255–271.
De Wolf, T., Holvoet, T. (2003). Towards Autonomic
Computing: Agent-Based Modelling, Dynamical
Systems Analysis, and Decentralised Control. In Proc.
of the First Int’l. Workshop on Autonomic Computing
Principles and Architectures.
Fernández-Caballero, A., Gascueña, J.M. (2009). Develo-
ping Multi-Agent Systems through Integrating Prome-
theus, INGENIAS and ICARO-T. In Proc. of Int’l.
Conf. on Agents and Artificial Intelligence (ICAART).
Himoff, J., Rzevski, G., Hinton, M., Skobelev, P. (2006).
MAGENTA Technology: Multi-Agent Logistics i-
Scheduler for Road Transportation. In Proc. of
AAMAS, Hokkaido (Japan).
Kashif, A., Binh Le., X.H., Dugdale, J., Ploix, S. (2011).
Agent-based framework to simulate inhabitants’
behaviour in domestic settings for energy
management. In Proc. of Int’l. Conf. on Agents and
Artificial Intelligence (ICAART).
Mathieu, P., Secq, Y. (2012). Environment Updating and
Agent Scheduling Policies in Agent-based Simulators.
In Proc. of Int’l. Conf. on Agents and Artificial
Intelligence (ICAART), 170-175.
Ribas-Xirgo, Ll., Miró-Vicente, A., Chaile, I. F., Velasco-
González, A. J. (2012). Multi-Agent Model of a
Sample Transport System for Modular In-Vitro
Diagnostics Laboratories. In Proc. of Emerging
Technologies and Factory Automation (ETFA),
Krakow (Poland).
Santa-Eulalia, L.A., Halladjian, G., D’Amours, S., Frayret,
J.-M. (2011). Integrated methodological frameworks
for modeling agent-based advanced supply chain
planning systems: A systematic literature review. In J.
Ind. Eng. & Management, JIEM, 2011 – 4(4):624-668.
Schreiber, S., Fay, A. (2011). Requirements for the
benchmarking of decentralized manufacturing control
AnAgent-basedModelofAutonomousAutomated-GuidedVehiclesforInternalTransportationinAutomatedLaboratories
267

systems. In Proc. of Emerging Technologies and
Factory Automation (ETFA).
Wojtusiak, J., Warden, T., Herzog, O. (2011). Agent-
based Pickup and Delivery Planning: The Learnable
Evolution Model Approach. In Proc. of Int’l. Conf. on
Complex, Intelligent and Software Intensive Systems
(CISIS), 1-8.
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
268
