
Evaluation of Emergent Structures in a ”Cognitive” Multi-Agent System
based on On-line Building and Learning of a Cognitive Map
Abdelhak Chatty
1,2
, Philippe Gaussier
2
, Ilhem Kallel
1
, Philipe Laroque
2
, Florence Pirard
2
and Adel M. Alimi
1
1
REGIM: REsearch Groups on Intelligent Machine,
University of Sfax, National School of Engineers (ENIS), Sfax, Tunisia
2
ETIS: Neuro-cybernetic Team, Image and Signal Processing,
Cergy-Pontoise University, National School of Electronics and its Applications (ENSEA), Paris, France
K
eywords:
Cognitive Multi-Agent System, Cognitive Map, Emergent Structures, Optimization.
Abstract:
This paper tries to analyze and evaluate emergent structures in a multi-agent system which is able to resolve
the warehouse location problem. These emergent structures allow agents to optimize their planning time and
to improve their adaptive behavior in an unknown environment. In our multi-agent system, each agent is
based on an on-line building and learning of its own cognitive map. It alters the positive impact of individual
behavior in the improvement of the overall performance of the system. We also suggest the evaluation of
the emergent structures by comparing the performance of our multi-agent system with a linear programming
approach. A series of simulations enables us to discuss and validate our system.
1 INTRODUCTION
To produce global emergent behaviors for multi-
agents system (MAS) (Simonin et al., 1998; Billing,
2010; Pepin et al., 2009; Chatty et al., 2011; Math-
ieu and Secq, 2012) the interaction between agents
based on stigmergy needs not to be complex (Mataric,
1992; Brooks, 1994; Bonabeau and Theraulaz, 1994).
Based on this idea, researchers have been able to de-
sign a number of successful algorithms in the field of
self-organized deposit of objects: (Deneubourg et al.,
1990) has proposed a model relying on biologically
plausible assumptions to account for the phenomenon
of the clustering of dead bodies by ants. (Gaussier and
Zrehen, 1994) showed that acting on objects simpli-
fies the reasoning needed by MAS and allows the de-
posit of scattered objects. The question which poses
itself to us is thus how to evaluate the emergent struc-
tures of MAS in the field of deposit systems? We be-
lieve that stimergy-based MAS, where agents are not
aware of all of the informations regarded with the en-
vironment, prove to be adaptive. However the MAS
do not guarantee the best solution, not even always a
good one. As an alternative, mathematical program-
ming approaches, such as linear programming (LP)
are widely used as an optimization tool (Matsui and
Matsuo, 2012) since they are able to compute the
best possible configuration of a constrained system.
However the distributed computing requires the over-
all knowledge of the system, including the informa-
tion that is difficult to obtain (such as the cost of re-
trieving informations, the initial number of agents so
on). The aim of this article is to analyze and to eval-
uate the emergent structures and their influence in a
MAS to resolve a warehouse location problem. To
prove the effectiveness of the emergent structures, we
suggest comparing our MAS approach and the results
provided by the LP approach. The paper is organized
as follows: section 2 describes the neural network
(N.N). Section 3 presents the behaviors of the cogni-
tive agents. Section 4 and 5 are devoted respectively
to the description and to the analysis of the relevance
of the emerging warehouses. Section 6 evaluates and
compares the performance of the multi-agent system
approach with the linear programming approach on
an optimization problem. The final section concludes
the paper.
2 THE N.N ARCHITECTURE
Several MAS approaches for navigation have been
proposed (Prodan et al., 2012; Portugal and Rocha,
269
Chatty A., Gaussier P., Kallel I., Laroque P., Pirard F. and M. Alimi A..
Evaluation of Emergent Structures in a ”Cognitive” Multi-Agent System based on On-line Building and Learning of a Cognitive Map.
DOI: 10.5220/0004258702690275
In Proceedings of the 5th International Conference on Agents and Artificial Intelligence (ICAART-2013), pages 269-275
ISBN: 978-989-8565-38-9
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
2012). Based on a bio-inspired architecture, we
present in this part a cognitive multi-agent system
(CMAS) in which each agent is able to navigate, learn
and create its owncognitivemap on-line, whose struc-
ture depends on their own experience of the environ-
ment in which they live. Starting from neurobiologi-
cal hypotheses on the role of hippocampus in the spa-
tial navigation, several works (O’Keefe and Nadel,
1978) revealed special cells in the rats hippocampus
that strike off when the animal is at a precise loca-
tion. These neurons have been called place cells (PC).
(Martinet et al., 2011) also proposed a model of a cog-
nitive map in the prefrontal cortex, which is based on
cortical columns. In our model, we do not directly use
PC to navigate, plan or construct a map, we rather use
neurons called transition cells (TC) (Gaussier et al.,
2002). This kind of cell type represents the basis of
the neurobiological model of temporal learning se-
quences in the hippocampus (Lubenov and Siapas,
2009). A transition cell encodes for a spatio-temporal
transition between two PCs consecutivelywinning the
competition, respectively at time t and δt. The set of
the PCs and the TCs constitute a non-cartesian cogni-
tive map. The interest of using transition cells is that
their association with an action is univoque and quite
straightforward. There is no need for an external algo-
rithm to extract the action from the cognitive map. To
develop our CMAS we will take inspiration from the
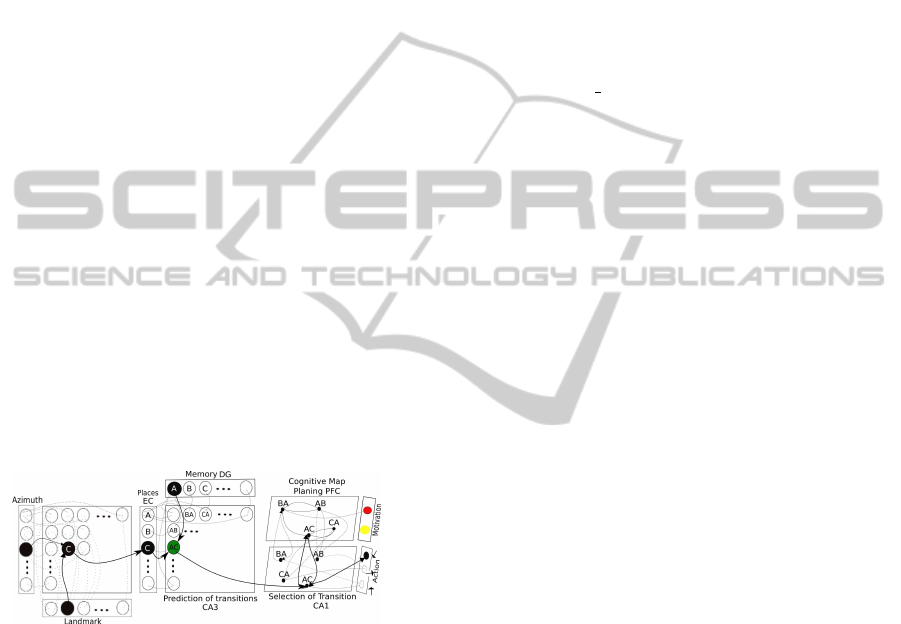
model of (Gaussier et al., 2002). A schematic view of
the architecture of our CMAS is shown in figure 1.
AC
AB
BA
Action
Motivation
CA
CA
Cognitive Map
Planing PFC
Selection of Transition
EC
DG
CA3
Prediction of transitions
Places
Memory
CA1
Figure 1: Model of hippocampo-cortical for the building of
an agent cognitive map.
To create the PC, the agent takes, a visual
panorama of the surrounding environment. The views
are processed to extract visual landmarks. After learn-
ing these landmarks, a visual code is created by com-
bining the landmarks of a panorama with their az-
imuth. This configuration serves as a code for PCs.
During exploration of the environment, the cognitive
map is gradually created when the agent moves from
one place to another. The equations that govern learn-
ing in the cognitive map is dW
CC
ij
(t)/dt = T(t).((γ−
W
CC
ij
).X
C
i
(t).X
C
j
(t) − W
CC
ij
(t).(λ1.X
C
j
(t) − λ. T(t) is
a binary signal (0 or 1) which is active when a tran-
sition is made (moving from one place to another).
This signal controls the learning of recurrent connec-
tions W
CC
. Each agent has motivations related to the
kind of plants. When the corresponding motivation
is riggered, the agent has to reach a plant allowing
the satisfaction of its needs. γ is a parameter less
than 1 which regulates the distribution of the moti-
vation activity on the map. λ1 and λ2 are param-
eters of respectively active and passive oblivion re-
spectively on the recurrent connections. S(t) is a sig-
nal marking the satisfaction of a goal (for example the
plant discovery). This signal controls the learning of
synaptic connections between neurons in W
MC
moti-
vations activity X
M
and neurons of the cognitive map
of activity X
C
where the equation is dW
MC
ij
(t)/dt =
S(t), f or
i, j
= arg max
k,l
(X
C
l
(t).X
M
K
(t)). After having
explored the environment, the agents are able to pre-
dict, in each position the locations directly reachable.
This model has been used in Cognitive Multi-Robot
System navigation tasks (Chatty et al., 2012) in which
where the agents were able to build their cognitive
maps and learn how to move towards various goals in
an unknown environment.
3 THE COGNITIVE-MAS
We suppose an economic environment composed by
several Animats and three plants with an abstract rep-
resentation namely A, B and C. The CMAS are mo-
tivated by the simulation of three types of needs re-
lated to the three plants and each need can be satis-
fied by a corresponding plant. The level of each type
of need is internally represented by an essential vari-
able, ei(t) whose value is in [0; 1] and varies with time
as in this equation de
i
/dt = −α
n
e
i
(t). In the equa-
tion, α
n
represents the decreasing rate of the essential
variable. When a satisfaction level e
i
(t) falls bellow
a given satisfaction threshold (ST), the correspond-
ing motivation is triggered so that the agents reach a
plant allowing to satisfy their needs using their cog-
nitive maps. Thus, the satisfaction of the motivation
allows an association of the current transition with the
cognitive map and the node (PC) associated with this
motivation. When discovering a plant, the satisfaction
of the motivation associated with it is associated with
the cognitive map at the location where it was found.
This motivation then spreads to the graph, indicating
the shortest path to reach the source from whichever
location known. Thus, the agents are able to take the
shortest path in order to satisfy the activated moti-
vation. If plant from the corresponding type haven’t
been found by the agent,the level decreases to 0 and
the agent dies. To maintain the satisfaction level of
our CMAS, instead of only navigating between the
three plants, it is interesting if the accumulation of in-
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
270

dividual decisions creates relevant warehouses. Ware-
house creation is possible if agents are able to carry
and deposit a quantity of products taken from plants.
The localisation of warehouses is important because
when agents reach them easily, they can increase their
average satisfaction level and optimize the planning
time spent looking for warehouses. In the context of
situated cognition, local rules can lead to create emer-
gent structures allowing the creation of warehouses
relevant to the sorting strategy used by (Deneubourg
et al., 1990). We propose generic local rules depend-
ing of the number of twithdrawals and deposits of
warehouses according to the number of agents per-
ceived. The agent can indeed, tend to favour the lo-
cation which contains other agents rather than empty
regions in order to create new warehouses. Thus, the
perception of local agents will control the rules of
withdrawals and deposits. The condition for with-
drawing is computed by equation 1: the probabil-
ity that an agent needs to take some plant goods in-
creases when it perceives that the plant is less used
by other agents. So, the more agents are near a plant,
the more the probability of withdrawal decreases and
vice versa.
Pr
(Taken)
= exp
−λN
A
(1)
where N
A
is the number of agents in the neighbor-
hood, λ is a positive constant. Equation 2 describe
the condition for deposits as follows: the probabil-
ity of deposit increases with time and distance from
the origin plant (when the agent is far from the origin
plant where it took the last goods) and it depends of
the number of the agents in the neighborhood (when
the current place of the agent is frequented by other
agents). For this reason, we tried to restrict the ability
of agents to perceive the environment that limists the
range of visual perception. Moreover, the deposit op-
eration is also built on the concept of refueling : the
agent puts goods in the warehouses that already exist.
Pr
(Deposits)
= (1− exp
−αN
A
) ∗ (1− exp
−βt
) (2)
where α,β are environmental factors, N
A
is the num-
ber of agents in the neighborhood and t is the time
since the taking.
4 BUILDING OF WAREHOUSES
We use the environment as shown in figure 2a at t=
0 where the three original plants are scattered. This
environment has a continuous topology and to cross it
diagonally agent needs 200 time steps. The agents
start to move randomly in the environment, with a
limited range of visual perception that can restrict
the ability of agents to perceive the environment (see
Figure2b). While passing through a plant, an agent
increases its level of satisfaction and carries out the
local rule of taking and transporting a quantity from
the associated product. The probability of taking in-
creases when the agent does not detect other agents
next to the sources. If the decision of transporting
some products is taken, the agent continues its travel.
The probability of deposits increases when the agent
detects other agents and it moves away from the orig-
inal sources.
(a) t=0 time steps (b) agents in the environment
(e) t=7720 time steps (f) stable configuration
(c) t=5980 time steps (d) t=6530 time steps
a
A
A
A
A
a
a
a
a
a
a
a
a
B
b
c
B
B
B
C
C
C
C
b
b
b
b
b
b
bb
c
c
c
c
c
c
c
a
b
c
Figure 2: The figure shows 3 plants A, B and C whose
positions are fixed and can deliver an unlimited amout of
products. They provide warehouses of 3 different kinds
(”a” is a warehouse-type A, ”b” is a warehouse-type B
and ”c” is a warehouse-type C). Through the individual de-
posit process of agents, warehouses emerge and become sta-
ble after a while. The video is available in http:// perso-
etis.ensea.fr/ neurocyber/ Videos/ Cognitive Multi-Robot
System/CMAS.
This means that the locations chosen for the deposit
are often common to several agents. Once deposited,
goods represent a new warehouse allowing others to
increase their satisfaction level. Agents also have the
possibility of refueling warehouses by adding prod-
ucts to them. This provides stability for warehouses
in relevant locations which are close to several agents
in order to prevent loss. During the refuelling the
available products in the warehouses will increase.
However, warehouses which are abandoned or poorly
visited will eventually disappear since the amount
of goods available will decrease rapidly. Figures 2c
and d show the disappearance of isolated warehouses.
When a planning agent tries to reach a previously
known warehouse and realizes that has disappeared,
EvaluationofEmergentStructuresina"Cognitive"Multi-AgentSystembasedonOn-lineBuildingandLearningofa
CognitiveMap
271

two things happen: (i) the agent dissociates the cur-
rent PC from the formerly-corresponding warehouse,
and (ii) it resets the motivation to 0. Since the PC
does not fire any more when the agent feels the need
for this warehouse, there are chances that the use of
transitions leading to this place be progressively for-
gotten. Similarly, when a new matching warehouse
is discovered, the paths leading to the warehouse are
immediately reinforced, making the cognitive map
evolve synchronously with the environment. Finally,
figure 2e shows that the CMAS converges to a stable
solution with a fixed number of warehouses in fixed
places at 7720 time steps and remains the same for
more than 20000 time steps (see figure 2f). Here we
note the emergence of stable large warehouses which
in some cases emerge to create warehouses ”village”
(narrow regions containing all 3 warehouses). We
tried to experimentally count the number of ware-
houses’ visits compared to the number of plants’ vis-
its for 20000 time steps. The average number of visits
to warehouses (115) is more important than that of the
original sources (27), which shows that their location
is more relevant. The same behavior also allows to
keep a fixed number of warehouses (here 6) and re-
move others located in irrelevant places without hav-
ing to use thresholds in order to limit the number of
warehouses nor to specify their locations. The adap-
tive capability of the cognitive map, allows cognitive
agents to create an emergent structure which is the
stable state for the whole multi-agent system allow-
ing the optimization of planing. Table 1 shows that
agents can optimize their planning time with the help
of relevant warehouses. This leads to a higher average
satisfaction level. These values show the performance
of our CMAS to keep the agents in their comfort zone.
Table 1: Optimization of planning time until 20000 time
steps (ts).
Only Plants Plants+Warehouses
Planning Time 1600ts 450ts
Satisfaction Level 59.89 88.07
We calculate the average satisfaction level (ASL) ac-
cording to this equation:ASL = (
1
3nN
) ∗
∑
n
i=1
(SL
a
i
+
SL
b
i
+ SL
c
i
). Where SL is the satisfaction level of
warehouses, n is the number of iterations, N is the
number of experiments. Based on an adaptive cog-
nitive map, this experiment allows our CMAS (i) to
optimize the planning time of agents and the number
of deposits thanks to the learning of the new places of
warehouses, (ii) to improve the adaptive behavior and
the level of satisfaction of agents and finally (iii) to
lead a fixed number of deposits in fixed places by the
creation of relevant emergent structures.
5 ANALYSIS OF EMERGENT
STRUCTURES
We describe here the relevance of the warehouses’ lo-
cation. It is a key factor of our system’s performance.
We placed the three original plants (A, B and C) in
the summits of an isosceles triangle because we know
that the center of gravity is indeed the relevant place
in this case. When it includes the warehouses, it al-
lows to optimization of the distance walked by the
agents to satisfy their needs. Thus, we tried to change
the satisfaction threshold (ST) to see its effect on the
agents’ behaviors as shown in figure 3. Basically the
agents have two behaviors. The first one is the explo-
ration mode that allows thgem to discover the envi-
ronement without needing to satisfy their motivations.
When the need arises and the motivation increases,
the agents change the planning mode to reach a plant
or warehouse to satisfy their needs. With low ST sit-
uation, the motivation decreases. However the agents
continue to create relevant warehouses in the path be-
tween plants (see figure 3a and b). When ST=50, the
agents can perform the two modes. In this case, we
note that the agents were able to adapt to environmen-
tal change and created villages of warehouses, which
consist of three types of warehouses in an appropriate
location at the gravity center of triangles (see figure 3c
and d). When we increase the ST (ST is stressful), the
agents will seek to satisfy their needs. Figure 3e and
f show that agents create villages of different kinds
of warehouses which are located near to the plants,
therefore the agents will stay near the villages. We
also note that the change of initial position of plants
doesn’t change the global configuration of the en-
vironment (see the first configuration of warehouses
with figure 3a,c and e; and the second configuration
with figure 3b,d and f). Thus, no matter the value of
ST and the position of the initial plants, the agents
can create warehouses in relevant locations. Instead
of browsing an Euclidean distance between the three
original plants which is equal to 59.2 to satisfy the
needs, agents can reduce this distance with the cre-
ation of near-perfect villages. The average Euclidean
distance according to 3a is 12.08, a value well be-
low 59.2 (the cost distance without warehouses). This
shows that the simple rules of withdrawals and de-
posits can generate emergent structures, including the
appropriateness of the location of warehouses, ensur-
ing optimization of the planning time of our CMAS.
These experiments allowed us to confirm the adaptive
behavior capacity of our CMAS, based on our rules
of withdrawals and deposits. Our cognitive agents are
able, regardless of the position of the original plants
and the shape of the environment, to choose - based
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
272

c
(a) ST=10 (b) ST=10
(c) ST=50 (d) ST=50
(e) ST=70 (f) ST=70
b
A
C
B
a
b
c
A
A
A
A
b
c
A
B
B
B
B
a
b
a
B
C
C
C
a
b
C
a
b
C
a
a
a
a
a
b
a
a
a
a
a
c
c
b
b
b
b
b
b
c
c
c
c
b
c
c
c
c
b
C
Figure 3: Different maps obtained after convergence of the
CMAS according to the satisfaction threshold (ST). The
agents were able to adapt to the position change by the orig-
inal plants and created a village of different kinds of ware-
houses in relevant places which allowed them to optimize
the planning time and to satisfy their needs.
Figure 4: The average distance of the followed paths ac-
cording to the ST and the number of agents. Figure shows
that between warehouses (visited by agents) the average dis-
tance is much less than the distance between the original
plants (D max =59.2). The figure also shows that agents are
able to choose - based on an individual cognitive process
- a better location for warehouses in order to optimize the
planning time and satisfy their needs.
on an individual cognitive process - a better location
for warehouses in order to optimize the planning time
and satisfy their needs.
Now, If we focus on the paths followed by agents,
figure 4 shows that between warehouses the average
distance is much less than the distance between the
original plants, regardless of the number of agents and
the satisfaction threshold (ST). To prove this, we cal-
culated using this equation L
i
=
∑
N
1
i=1
∑
N
2
j=1
d(a,b) +
d(a,c) + d(b,c)/N
1
∗N
2
the average Euclidean length
L
i
of the paths followed by the agents between the
warehouses of different types for each simulation (du-
ration of 20000 time steps).
Finally, we calculated the average distance Av(L
i
)
on all of the n experiments: with L
i
: distance of one
experience, a,b and c: warehouses, N
1
: number of
agents, N
2
: number of cycles. This distance reaches
its maximum 48.86 which is less than 59.2 (distance
between the original plants) with 50 agents and with
TS equal to 70. This shows that the warehouses allow
the agents to optimize their paths in an emergent way,
to satisfy their needs without the use of an optimiza-
tion model of navigation. Thus, the simple rules of
withdrawals and deposits can generate emergent be-
haviors, including the appropriateness of the location
of warehouses, ensuring the optimization of the plan-
ning time of our CMAS.
6 EVALUATION OF EMERGENT
WAREHOUSES’ LOCATION
To make the application field of our CMAS more con-
crete and to test the adaptability of our agents when
changing the context, we have added customers to
the environment in order to switch back to a classi-
cal warehouse location problem: We distribute a set
of products to a set of demand zones either directly
from production plants or through warehouses. In-
deed, trying to use MAS to supply chain-like prob-
lems is not new (Yadati et al., 2010); however in most
cases dedicated and pecialized agents are used. In this
part we describe a formal instrument of performance
that shows how our CMAS can be adapt to an opti-
mization problem and reasonably give a sound result
related to MAS
IAA
(Laroque et al., 2010) which is a
deposit system that takes inspiration from ant sorting
skills used to build a cemetery and with a MAS
Random
which makes random deposits. Initially, the ware-
houses which have a limited capacity don’t exist. We
assume that the transport cost is lower between plants
and warehouses than between plants and customers.
A set of potential sites to locate the warehouses is
determined a priori (in our case a regular paving of
the environment to try to find the optimal set of lo-
cations). We assume that the production plant capac-
ity is sufficient to satisfy the customer’s requests. We
want to determine which warehouses should be used
and where. To determine then the product flows (i)
between the production plants and the customers (di-
rect delivery), (ii) between the production plants and
the warehouses (internal traffic) and (iii) between the
warehouses and the customers (indirect delivery). To
materialize the cost of transport in our simulations,
during a deposit, the agent must wait for θ = 29 sec-
ond which represents the time of the creation of such
deposit, so the level of needs will decrease.
EvaluationofEmergentStructuresina"Cognitive"Multi-AgentSystembasedonOn-lineBuildingandLearningofa
CognitiveMap
273
6.1 Modeling the Warehouse Location
We start to express the warehouse location problem
and its constraints, and then we designed a mixed in-
teger program. We used the following sets of indexes
in our model: Product (P), Demand zone (customers)
(D), Production plant (U) and Warehouse (W). To ex-
press the model, the following data are required: d
up
is the number of units u of product p required by de-
mand zone d. c
w
is the maximum number of units u of
products which can come through the warehouse w.
dc
pud
,ic
puw
,ic
′
pwd
are the unit delivery cost of prod-
uct p from plant u and warehouse w to respectively
demand zone d, warehouse w and demand zone d.
wc
w
is the fixed cost associated to the use of ware-
house w. The decision variables are W
w
: Binary
variable indicating the use of w (use of w =1; else=
0). Qd
pud
,Qiw
puw
, Qid
pwd
are the number of units p
shipped by plant u and warehouse w to respectevely
demand zone d, warehouse w and demand zone d. As
objective function, we chose the minimization of the
total cost of transport to converge to an optimal solu-
tion.
min( f ) =
∑
W
w=1
wc
w
.W
w
+
∑
P
p=1
∑
U
u=1
∑
D
d=1
dc
pud
.Qd
pud
+
∑
P
p=1
∑
U
u=1
∑
W
w=1
ic
puw
.Qiw
puw
+
∑
P
p=1
∑
W
w=1
∑
D
d=1
ic
′
pwd
.Qid
pwd
where the constraints: The model must satisfy the
demand zone from warehouses or/and plants.
∑
U
u=1
Qd
pud
+
∑
W
w=1
Qid
pwd
= d
pd
(∀p ∈ P∀d ∈ D),
The model must not exceed the warehouses capacity.
∑
P
p=1
∑
U
u=1
Qiw
puw
≤ c
w
.W
w
(∀w ∈ W)
The quantities must be concerned between plant to
warehouses and warehouses to demand zone.
∑
U
u=1
Qiw
puw
=
∑
D
d=1
Qid
pwd
(∀p ∈ P∀w ∈ W)
The model must also respect the constraints of inte-
grality and non negativity and ensure flows between
plants, warehouses and demand zone.
W
w
∈ 0,1,Qd
pud
> 0,Qiw
puw
> 0,Qid
pwd
>
0,(∀w ∈ W, p ∈ P, u ∈ U, d ∈ D,)
6.2 MAS vs. Linear Programming
To make the comparison between the LP and the MAS
approachs possible, we must extract from each MAS
system (MAS
Random
, MAS
IAA
and our CMAS) the cus-
tomer demand to inject it into the LP in order to have
an equivalent demand (because it’s not the same in
the three systems). Thus the LP will give us the op-
timum warehouses’ positions for each system. For
this reason, our instrument of performance consists of
the computing of the average distance between MAS
warehouses’ location and LP warehouses’ location for
each system. Unlike LP, the MAS is not deterministic
because it does not provide the same results on sev-
eral tests with the same parameters. We performed 10
tests of MAS and 1 test of linear programming and
then compared the average of the 10 tests of MAS
with LP. For each warehouse W
i
of LP (equation 3),
we summed the minimum distance between the W
i
warehouse and the corresponding MAS W
i
’:
d
i
= min(d(W
i
,W
′
j
)) (3)
where d is the Euclidean distance on the environment.
The average distance of an experiment Exp
k
(equa-
tion 4) is summed with a penalty p which depends on
the difference between the number nof warehouses in
LP and the number n’ of warehouses in MAS:
d(Exp) = ((
n
∑
i=1
d
i
n
) + p(|n
′
− n|)) (4)
Finally, we calculated the average distance of all the
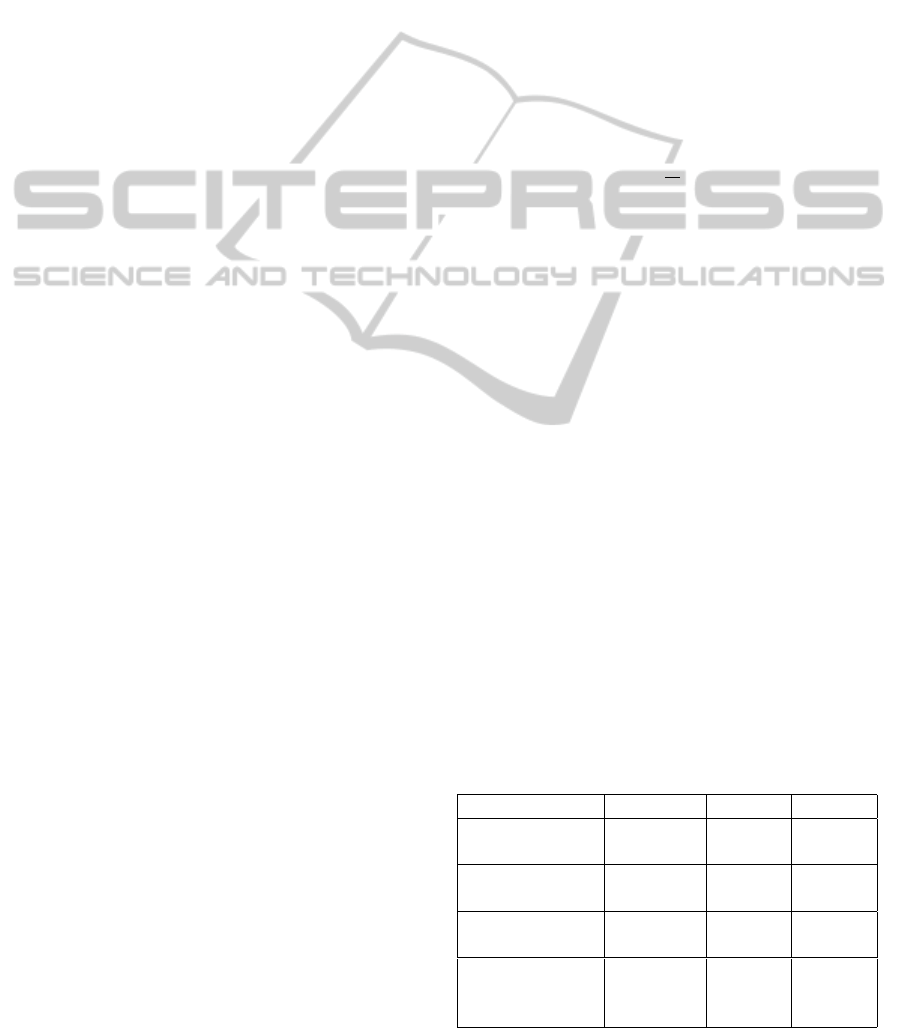
Ne experiments. Table 2 shows that our CMAS could
optimize the average cost of the warehouses loca-
tion better than the MAS
IAA
and the random sys-
tem MAS
Random
. We also note that with a homoge-
neous distribution of plants and customers, we obtain
a small average distance with a quasi-optimal number
of deposits compared to mathematical programming
with a very low standard deviation, which means that
in CMAS the warehouses are well placed if we com-
pare them to a MAS
IAA
and to a MAS
Random
and close
to the locations given by the mathematical program-
ming solution in the environment. The results ob-
tained confirm the performance of the emergent struc-
tures based on cognitive process which allows us to
have good solutions that approximate the solution of
LP in a time equal to 40 minutes (non optimized java
simulation), while LP approximately requires on av-
erage several hours with a very large standard devi-
ation, going from 2 minutes to more than 24 hours
(GLPK software) to solve the same problem (with the
same configuration of machines).
Table 2: The average distance of the MAS systems relative
to the LP solution.
MAS
Random
MAS
IAA
CMAS
Average number
of deposits
22 15 4
Average cost of
the solution
40671.3 55606.4 15210.6
Average distance
relative to LP
42.7 27.3 6.9
Standard
deviation of
average distance
9.0 10.7 1.8
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
274

7 CONCLUSIONS
In this paper we describe how the local learning with
the accumulation of individual decisions advocates
the creation of new emergent structure. We suggest a
set of simulations that analyze the positive impact of
individual behavior in the improvement of the global
performance of the system. This individual behavior
that is based on the bio-inspired cognitivemap, allows
the agents to avoid planning problems before a com-
plete exploration of the environment. It also leads to
the same results as a pheromon-based system without
the need to leave a physical trace in the environment.
Thus, the coupling of the individual behavior with the
embodiement of the agents (satisfaction of their moti-
vations) can solve multi-objective planning problems
although formally the algorithm is not able to ”mix
and to merge and to optimize” several objectives. In
conclusion, we suggest an emergent multi-objective
optimization. Finally we suggest the evaluation of
the emergent structures in MAS by comparing our
CMAS, the MAS based on cemetery organization of
ants and the random MAS with a linear programming
approach. The results obtained confirm the perfor-
mance of our emergent behavior based on cognitive
processes which allow us to have adequate solutions
that approximate the linear programming solution. To
study the limits of emergent structures in real world,
we started to validate the adaptive capability of the
cognitive map in a real multi-robot system (Chatty
et al., 2012) and now we are trying to add the deposit
system in the multi-robot system.
ACKNOWLEDGEMENTS
The authors would like to thank the financial sup-
port of the Tunisian General Direction of Scientific
Research and Technological Renovation (DGRSRT),
under the ARUB program 01/UR/11 02, the Institut
Francais de Tunisie
REFERENCES
Billing, E. A. (2010). Cognitive perspectcoives on robot
behavior. In ICAART (2), pages 373–382.
Bonabeau, E. and Theraulaz, G. (1994). Intelligence Col-
lective. Hermes.
Brooks, R. A. (1994). Coherent behavior from many adap-
tive processes. In in SAB, pages 22–29, Cambridge,
MA, USA. MIT Press.
Chatty, A., Gaussier, P., Kallel, I., Laroque, P., and Alimi,
A. (2012). Adaptation capability of cognitive map im-
proves behaviors of social robotics. In in IEEE ICDL-
EpiRob (to appear).
Chatty, A., Kallel, I., Gaussier, P., and Alimi, A. (2011).
Emergent complex behaviors from swarm robotic sys-
tems by local rules. In IEEE Symposium Series on
Computational Intelligence, (RiiSS), pages 69 –76.
Deneubourg, J. L., Goss, S., Franks, N., Franks, A. S., De-
train, C., and Chr´etien, L. (1990). The dynamics of
collective sorting robot-like ants and ant-like robots.
In SAB, pages 356–363, Cambridge, MA, USA. MIT
Press.
Gaussier, P., Revel, A., Banquet, J. P., and Babeau, V.
(2002). From view cells and place cells to cognitive
map learning: processing stages of the hippocampal
system. Biological Cybernetics, 86(1):15–28.
Gaussier, P. and Zrehen, S. (1994). Avoiding the world
model trap: An acting robot does not need to be so
smart! Robotics and Computer-Integrated Manufac-
turing, 11(4):279 – 286.
Laroque, P., Pirard, F., Archambault, F., Quoy, M., and
Gaussier, P. (2010). Comparing multi-agent system
and mixed-integer programming approaches on a sim-
ple optimization problem. In IC-AI, pages 977–981.
Lubenov, E. V. and Siapas, A.G. (2009). Hippocampal theta
oscillations are travelling waves. volume 459, pages
534–539. Nature Publishing Group.
Martinet, L.-E., Sheynikhovich, D., Benchenane, K., and
Arleo, A. (2011). Spatial Learning and Action Plan-
ning in a Prefrontal Cortical Network Model. PLoS
Comput Biol, 7(5).
Mataric, M.-J. (1992). Designing Emergent Behaviors:
From Local Interactions to Collective Intelligence. In
Meyer, J.A., R. H. and Wilson, S., editors, Proceed-
ings of the Second Conference on Simulation of Adap-
tive Behavior, pages 1–6. MIT Press.
Mathieu, P. and Secq, Y. (2012). Environment updating and
agent scheduling policies in agent-based simulators.
In ICAART (2), pages 170–175.
Matsui, T. and Matsuo, H. (2012). Analysis for distributed
cooperation based on linear programming method. In
ICAART (2), pages 228–233.
O’Keefe, J. and Nadel, L. (1978). The hippocampus as
a cognitive map / John O’Keefe and Lynn Nadel.
Clarendon Press ; Oxford University Press, Oxford.
Pepin, N., Simonin, O., and Charpillet, F. (2009). Intelligent
Tiles: Putting Situated Multi-Agents Models in Real
World. In AAAI, A., editor, ICAART, Porto, Portugal.
Portugal, D. and Rocha, R. P. (2012). Extracting topological
information from grid maps for robot navigation. In
ICAART (1), pages 137–143.
Prodan, I., Olaru, S., Stoica, C., and Niculescu, S.-I. (2012).
Predictive control for trajectory tracking and decen-
tralized navigation of multi-agent formations. In Fil-
ipe, J. and Fred, A. L. N., editors, ICAART (2), pages
209–214. SciTePress.
Simonin, O., Ferber, J., and Decugis, V. (1998). Perfor-
mances analysis in collective systems. ICMAS, pages
469–. IEEE Computer Society.
Yadati, C., Witteveen, C., and Zhang, Y. (2010). Coordi-
nating agents - an analysis of coordination in supply-
chain management tasks. In ICAART (2), pages 218–
223.
EvaluationofEmergentStructuresina"Cognitive"Multi-AgentSystembasedonOn-lineBuildingandLearningofa
CognitiveMap
275
