Towards Epistemic Planning Agents
Manfred Eppe
1
and Frank Dylla
2
1
Department of Computer Science and Mathematics, University of Bremen, Bremen, Germany
2
Cognitive Systems, SFB/TR8 Spatial Cognition, University of Bremen, Bremen, Germany
Keywords:
Planning, Epistemic Reasoning, Action Theory, Event Calculus.
Abstract:
We propose an approach for single-agent epistemic planning in domains with incomplete knowledge. We argue
that on the one hand the integration of epistemic reasoning into planning is useful because it makes the use of
sensors more flexible. On the other hand, defining an epistemic problem description is an error prone task as
the epistemic effects of actions are more complex than their usual physical effects. We apply the axioms of
the Discrete Event Calculus Knowledge Theory (DECKT) as rules to compile simple non-epistemic planning
problem descriptions into complex epistemic descriptions. We show how the resulting planning problems are
solved by our implemented prototype which is based on Answer Set Programming (ASP).
1 INTRODUCTION
Many approaches to AI planning rely on the strong
and unrealistic assumption that complete knowledge
about the world is available. These planning sys-
tems which consider incomplete knowledge usually
don’t consider conditional action effects and infor-
mation acquired by sensing is always used directly.
We point out that if epistemic reasoning (ER) (Black-
burn et al., 2001) is integrated in planning, then sens-
ing provides extra information. Our first hypothesis
is: A planning system which accounts for both epis-
temic reasoning and actions with conditional effects
can be used to compensate for missing or broken sen-
sors and to work around expensive sensing actions
using cheaper sensing actions. For example, if one
wants to find out whether a liquid is poisonous it is
costly to learn about its poisonousness by drinking
the liquid. Instead, conditional effects of actions can
be exploited to achieve indirect sensing. Assume a
robot with the (sub-)goal to know whether a door is
open or not. If equipped with an appropriate sensor
it will sense the door state and the goal is achieved.
If it does not feature this specific door sensor or if
the sensor is broken it can still acquire the informa-
tion indirectly, e.g. through a location sensor it might
be equipped with: It tries to drive through the door,
senses its location and infers the door’s open-state via
the location. If it is behind the door then the door
is open and if it is still in front of the door, then the
door is closed. In the following, we use the term epis-
temic planning (EP) when we speak about a single
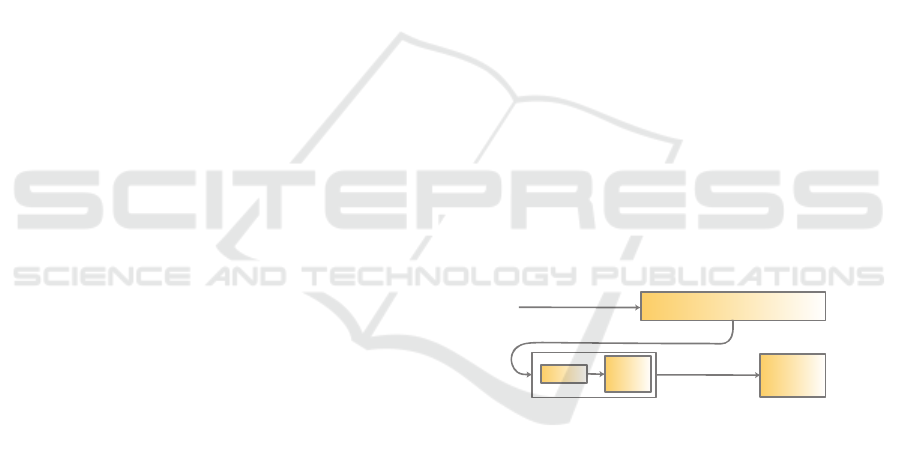
Epistemic translator
Execution
monitor
PLIK problem
representation
Epistemic EC representation
f2lp
gringo
claspD
Stable models /
Conditional plan
Figure 1: The toolchain of our planning system.
agent which is aware of having incomplete knowledge
about the world, which can sense and which integrates
epistemic reasoning in the planning process. A prob-
lem in EP is that deriving epistemic representations
of planning problems can be cumbersome when done
manually (see Section 4.) Our second hypothesis is:
The automated translation of non-epistemic planning
problem domains into epistemic ones simplifies the
formal description of planning problems. We also ar-
gue that automated translation also guarantees sound-
ness wrt. epistemic theory, and we make the claim that
currently there exists no planning system which au-
tomatically generates epistemic planning domain de-
scriptions and which considers actions with condi-
tional effects. Our main result is the Planning Lan-
guage for Incomplete Knowledge (PLIK) and a tool
which performs the automated translation of PLIK
planning problem descriptions into an epistemic di-
alect of the Event Calculus (EC) (Kowalski, 1986)
using the Discrete Event Calculus Knowledge The-
ory (DECKT) (Patkos and Plexousakis, 2009) (Figure
1). The epistemic problem description is input of the
f2lp-tool by Lee and Palla (2012) which translates the
problem description into an answer set programming
(ASP) problem. We interpret the solutions of the ASP
311
Eppe M. and Dylla F..
Towards Epistemic Planning Agents.
DOI: 10.5220/0004260603110317
In Proceedings of the 5th International Conference on Agents and Artificial Intelligence (ICAART-2013), pages 311-317
ISBN: 978-989-8565-39-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

problem as conditional plans. For details which we
omit in this paper due to space restrictions we refer to
(Eppe and Dylla, 2012).
2 RELATED WORK
The Model Based Planning (MBP) system by Bertoli
et al. (2001) is closely related to our work, as it im-
plicitly accounts for the knowledge-level effects of
actions. That means, one can specify conditional ef-
fects of actions in its input language NPDDL (Bertoli
et al., 2002) and the planner handles their epistemic
effects. However, the authors do not prove that
their underlying action theory is epistemically sound.
The PKS planner by Petrick and Bacchus (2004) is
the only system we know which explicitly regards
for knowledge-level effects of actions. Nevertheless,
knowledge-level effects must be handled manually
and demand a complex problem specification.
Planners demand for action theories which de-
scribe properties of the world and how they change.
Prominent examples are the Situation Calculus (SC)
(Reiter, 2001), Event Calculus (EC) (Kowalski, 1986)
and Fluent Calculus (FC) (Thielscher, 1998). Action
theories involving epistemic reasoning are introduced
by (Moore, 1985), who describes the possible-worlds
semantics of knowledge using Kripke structures and
an epistemic K-fluent. (Scherl and Levesque, 2003)
continue this work and solve the frame problem for
epistemic SC. IndiGolog (De Giacomo and Levesque,
1998) and FLUX (Thielscher, 2005) are high-level
programming languages based on SC and FC. In both
languages it is possible to express epistemic effects of
actions but these effects have to be implemented man-
ually and their epistemic accuracy is not guaranteed.
Our work is based on the Event Calculus (EC)
by (Kowalski, 1986) and the Discrete Event Cal-
culus Knowledge Theory (DECKT) by (Patkos and
Plexousakis, 2009). The theory uses the predicate
HoldsAt ( f , t) to state that a fluent f holds at time
t. Happens (e, t) denotes that the event e happens at
t. Initiates (e, f , t) and Terminates(e, f , t) define ef-
fects of events.
1
We use ∆ to denote conjunctions of
Happens-statements and γ to denote conjunctions of
HoldsAt-statements. An effect axiom has the form
γ ⇒ π(e, f , t) where π ∈ {Initiates, Terminates}. A
precondition axiom has the form Happens (e, t) ⇒ γ,
1
Throughout this text, all variables are universally quan-
tified if not stated otherwise. Variables for events/actions
are denoted by e, for fluents by f , for literals by l and for
time by t. Reified fluent formulae φ do not contain quanti-
fiers or predicates. Second order expressions do not occur.
saying that an event can only happen if condition γ
holds.
2
Planning in EC is abductive reasoning. (Shanahan,
2000) describes EC planning as follows: Consider Γ
to be the initial world state, Γ
0
the goal state and Σ a
set of action specifications. One is interested in find-
ing a plan ∆ such that:
CIRC[Σ; Initiates, Terminates, Releases]∧
CIRC[∆; Happens] ∧ Γ ∧ Ω ∧ EC |= Γ
0
(1)
where CIRC denotes circumscription (Mueller, 2005)
and Ω denotes uniqueness of names axioms.
Patkos and Plexousakis (2009) developed
DECKT, an epistemic theory for EC. They show
that the theory is sound and complete wrt. T
system (Blackburn et al., 2001) of the possible
world semantics.They introduce an epistemic
Knows-fluent using nested reification. For example,
HoldsAt (Knows(¬ f ), t) means that at time t the
agent knows that f is false. Knows-fluents are
released from inertia at all times in DECKT. DECKT
also uses a fluent KP(f) which states that f is known
persistently, i.e. KP-fluents are not released from
inertia. DECKT states, that everything which is
KP-known is also Knows-known:
HoldsAt (KP(φ), t) ⇒ HoldsAt (Knows(φ), t) (2)
Reification allows for expressing so-called Hidden
Causal Dependencies (HCD). HCDs are implications
like HoldsAt (KP( f ⇒ f
0
), t), expressing that it is
known that if f is true then f
0
is also true. DECKT’s
axiom (3) states that a fluent can only be known if it
is KP-known or if it is known through an implication.
HoldsAt (Knows(φ), t) ⇒ HoldsAt (KP(φ), t) ∨ (3)
HoldsAt
KP(φ
0
), t
∧ HoldsAt
KP(φ
0
⇒ φ), t
3 EPISTEMIC PLANNING
A problem specification consists of a set of types T ,
a set of objects O, a set of fluents F , a set of action
specifications A, a set of goals G and a set of state-
ments about the agent’s initial knowledge I which
may be incomplete. T , O, F , A, G and I are finite
and may be empty.
Types are sorts in an EC domain description. A
PLIK type specification is e.g.:
(: t yp es Do or Ro o m Ro b ot )
2
For more details concerning precondition axioms we
refer to (Mueller, 2005).
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
312
Objects are elements of a certain sort:
(: ob j e c t s c orr ido r , li v i n g R o o m - R o om
d1 - Doo r wc , v c - Rob ot )
where the “-” is to be read as “element-of”.
Fluents have a set of arguments of a certain type. An
example for the fluent specification in PLIK is:
(: fl u e n t s
ha sD o o r ( Room , D o or ) in R o o m ( Robot , R o om )
op e n e d ( Doo r ) i s R o b u s t ( Ro bo t ) )
There may exist a sensing action for a fluent f . There-
fore we define two deterministic events for each flu-
ent, senseT(f) and senseF(f).
Initiates(senseT ( f ), KP( f ), t)
Terminates(senseT ( f ), KP(¬ f ), t)
Initiates(senseF( f ), KP(¬ f ), t)
Terminates(senseF( f ), KP( f ), t)
(4)
Goals are specified as follows:
(: g oa l ( and ( or [3] i n R o om ( wc , l i v i n g R o om ) )
( or [ 4 ] ! i nR o o m ( vc , l i v i n g Ro om ) ) ) )
where the numbers in square brackets represents the
time limit until the literal must be known to hold. Its
general form is conjunctive normal form (CNF):
( an d ( o r [t
1
1
]l
1
1
. . . [t
1
n
]l
1
n
) . . .
( or [t
m
1
]l
m
1
. . . [t
m
n
]l
m
n
) )
It translates to epistemic EC as follows:
m
^
i=1
n
_
j=1
HoldsAt
Knows(l
i
j
), t
i
j
(5)
Initial Knowledge is provided as follows:
(: i ni t i n R oo m ( wc , c o r r i d o r ) i nR oo m ( vc , co rr id or )
is Ro bu st ( vc ) h as Do or ( co rri d or , d1 )
ha sD o o r ( l iv in g Ro o m , d1 ) )
It is a set I of literals which are known to hold at time
0. They translate to epistemic EC as:
^
l
i
∈I
HoldsAt (KP(l
i
), 0) (6)
EC does not use negation-as-failure, so we also have
to explicitly state what the agent does not know:
^
l
i
∈I
l 6= l
i
⇒ ¬HoldsAt (KP(l), 0) (7)
where the l
i
are these literals the agent knows.
Action Specifications. We illustrate the translation
of action specifications with the following example:
(: ac t io n m o v e R o o m T o R o o m
: p a r a m e te rs (? ro b o - R o bo t ? d o or - Doo r ? f r om
? to - Ro o m )
: p r e c on d i t i o n ( a nd
in R o o m (? robo ,? fr o m ) ! i n R o om (? robo , ? to )
ha sD o o r ( ? from , ? d o or ) h a sD oo r (? to , ? d o or )
( or i s R o b u s t (? rob o ) o pe n ed (? do o r ) ) )
: e ff e c t
( if ( an d o pe n e d (? do o r ) i n R oo m (? robo , ? f ro m ) )
the n ( an d i n R oo m ( ? robo , ? to )
! i nR o o m (? robo , ? f r om ) ) ) )
It describes the conditional effect that if a robot exe-
cutes this action it will end up in the target room if the
door to the room is open. The precondition states that
the agent will only consider this action if it knows that
the door is open or that the robot is robust (so crash-
ing against a closed door does not cause harm). It
consists of a parameters section, a precondition spec-
ification and a conjunction of conditional effects. The
parameters are variables (denoted with the preceding
?) and quantified over the scope of their sort. An ac-
tion’s precondition is given in CNF:
( an d ( o r l
1
1
. . . l
1
n
) . . . ( o r l
m
1
. . . l
m
n
) )
Let e be the action’s name, then we have in EEC:
Happens(e, t) ⇒
m
^
i=1
n
_
j=1
HoldsAt
Knows(l
i
j
), t
(8)
This states, that an event can only happen if its pre-
conditions are known to hold. In terms of planning, it
means that the planner will only consider actions in a
plan when it knows that their preconditions hold.
A conditional effect of an action has the form:
( if ( an d l
1
. . . l
k
) th e n ( a n d l
1
. . . l
m
) )
It can be represented as a pair (E, C) where C =
{l
1
, . . . , l
k
} is a set of condition literals and E =
{l
1
, . . . , l
m
} is a set of effect literals. Even though
we consider epistemic planning, the physical non-
epistemic effects of actions are still valid. Thus, we
have to add one non-epistemic effect axiom for each
l
j
∈ E to our theory:
^
l
i
∈C
HoldsAt (l
i
, t) ⇒ π(e, f
j
, t)
(9)
where l
i
∈ C are the condition literals, f
j
are
the fluents of the literals l
j
∈ E and π ∈
{Initiates, Terminates}.
DECKT states that if all condition literals of a condi-
tional effect are known to hold, then its effect literals
are also known to hold. For every effect literal l
j
in a
TowardsEpistemicPlanningAgents
313

conditional effect of an action we add:
n
^
i=1
HoldsAt (Knows(l
i
), t)
⇒ Initiates(e, KP(l
j
), t) (10)
Knowledge about an effect fluent is lost if a) at least
one of the conditions is unknown and if b) there is no
condition which is known not to hold and if c) the new
truth value of the effect fluent is not already known.
Thus, for every l
j
∈ E we add the effect axiom:
_
l
i
∈C
¬HoldsAt (Knows(l
i
), t)
!
∧
^
l
i
∈C
¬HoldsAt (Knows(¬l
i
), t)
!
∧
¬HoldsAt (Knows(l
j
), t)
⇒ Terminates(e, KP(l
j
), t)
(11)
DECKT defines how knowledge about the effect of an
action is obtained through knowledge about its con-
dition. This is useful, e.g. if for some reason sensing
a door’s open-state is not possible in certain rooms.
In this case one can send the robot through the door,
sense its open-state after the execution and retroac-
tively infer the robot’s location.
At the current state we only account for the case
where one condition is unknown. If knowledge about
the unknown condition is acquired later and the con-
dition is revealed to hold, then knowledge about the
effect is revealed indirectly.
Thus, for every effect literal l
j
∈ E and for every
potentially unknown condition literal l
u
∈ C we have
the following clause:
^
l
i
∈C\{l
u
}
HoldsAt (Knows(l
i
), t)
∧
¬HoldsAt (Knows(¬l
u
), t)∧
¬HoldsAt (Knows(l
j
), t)
⇒ Initiates (e, KP(l
u
⇒ l
j
), t)
(12)
The event initiates an implication, stating that if l
u
is
true then l
j
must also be true.
In order to acquire knowledge about a condition
through an effect, the effect of an action must be
known not to hold at the action’s execution time, and
there must be no condition which is known not to
hold. If the effect later becomes known to hold, then
all conditions of the actions must also hold. Thus,
for each condition literal l
j
∈ C and each effect literal
l
i
∈ E, we add the following clause to our theory:
¬HoldsAt (Knows(l
i
), t)∧
¬HoldsAt (¬Knows(l
j
), t)∧
¬HoldsAt (Knows(l
j
), t)
⇒ Initiates (e, KP(l
j
⇒ l
i
), t)
(13)
where e is the action’s name.
DECKT uses the predicate KmAffect to express
that an event may affect a fluent. The predicate holds
for each effect l
j
∈ E of a conditional effect (C, E) of
an event e if there is no condition which is not known
not to hold:
Happens(e, t) ∧
^
l
i
∈C
¬HoldsAt (Knows(¬l
i
), t)
⇒ KmAffect(e, f
j
, t)
(14)
where f
j
is the fluent in the literal l
j
.
An implication is terminated if one of the involved
fluents may be affected.
HoldsAt
KP(l ⇒ l
0
), t
∧
KmAffect(e, f , t) ∨KmAffect(e, f
0
, t)
⇒ Terminates
e, KP(l ⇒ l
0
), t
(15)
There are four more axioms we do not explicitly men-
tion in this paper for brevity reasons. One states that
Knows-fluents are always released from inertia. The
epistemic truthness axiom says that everything which
is known to hold does indeed hold. Another axiom
determines how knowledge which is gained through
an implication becomes persistent if the implication
is terminated and the last axiom handles transitivity
of implications which sometimes must be made ex-
plicit. We point the interested reader to (Patkos and
Plexousakis, 2009) and refer to these two axioms as
D
−
.
Observations are a key element of epistemic theories.
They provide the agent’s basis for knowledge acqui-
sition. In PLIK we use the keyword :observation to
describe sensing effects. For example:
(: ac t io n s e n se In R o o m
: p a r a m e te rs (? ro b o - R o bo t ? r o om - Ro o mf )
: o b s e rv at i o n ( and in Ro om (? r o b o , ? ro o m ) ) )
This action does not have a precondition or a physical
effect and is thus a pure sensing action.The observa-
tions are provided as a conjunction (and f
1
. . . f
|O|
).
For each observed f
i
we add the event axiom:
Happens(e(v), t) ⇒ (16)
Happens(senseT ( f
i
), t) ∨ Happens(senseF( f
i
), t)
with f
i
∈ v. Intuitively, if a sensing action happens,
then either positive or negative sensing will happen.
Solving Epistemic Planning Problems. Given a
planning problem description in PLIK, we generate
an EEC representation as follows:
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
314

1. Objects, types and fluents are declared.
2. For each fluent we declare and specify senseT and
senseF events Σ
s
as described in (4).
3. Initial knowledge Γ is specified as described in
(6), (7); goals Γ
0
are specified as described in (5).
4. Action specifications Σ are generated through (8),
(9), (10), (11), (12), (13), (14) and (16).
The pair (∆, Γ
∗
) is a possible solution to the planning
problem with incomplete knowledge if the following
holds:
CIRC[Σ ∧ Σ
s
;Initiates, Terminates, Releases] ∧ (17)
CIRC[∆; Happens] ∧ Γ ∧ Γ
∗
∧ Ω ∧ EC ∧DECKT |= Γ
0
where DECKT = (2) ∧ (3) ∧ (15) ∧ (D
−
) represents
the domain-independent DECKT axioms which are
not generated by our translation. Γ
∗
can be inter-
preted as a possible world in which the plan ∆ is a
solution to the planning problem, i.e. Γ
∗
is a conjunc-
tion of HoldsAt statements which can be seen as a
condition under which ∆ solves the planning prob-
lem. Figure 2 shows how Γ
∗
and ∆ are included in
the stable models generated by the ASP tools. The
complete solution of the planning problem is the set
of all n pairs (∆
n
, Γ
∗
n
) for which the entailment (17)
holds. This solution can be interpreted as a condi-
tional plan with the conditions represented by Γ
∗
i
and
the actions to be executed under a certain condition by
∆
i
. The execution of this plan then demands for an ex-
ecution monitor which compares the possible worlds
Γ
∗
i
with the agent’s knowledge about the world. At ex-
ecution time, the agent non-deterministically chooses
a plan ∆
i
and follows it as long as the condition Γ
∗
i
is not inconsistent with the agent’s knowledge about
the world. If Γ
∗
i
becomes inconsistent due to sensing
actions, then the agent has to choose another branch
(∆
j
, Γ
∗
j
) with a Γ
∗
j
that is consistent with the agent’s
knowledge about the world. If no such Γ
∗
j
exists, then
the problem is unsolvable.
Implementation Issues. Lee and Palla (2012) pro-
pose to use Answer Set Programming to solve EC
reasoning problems and show that their approach out-
performs existing solutions like the DECreasoner by
(Mueller, 2005). We make use of their f2lp tool to
translate the EEC planning problem description into
an ASP representation of the problem. We use the
tool gringo (Gebser et al., 2011) to generate the Her-
brand Models of the problem and claspD (Drescher
et al., 2008) as the ASP solver. Unfortunately, not
the f2lp-tool we use nor any other reasoner we know
about supports reification. Therefore, we had to sac-
rifice completeness of our planner and define special
predicates which translate as follows:
Knows( f , t) := HoldsAt (Knows( f ), t)
KnowsNot( f , t) := HoldsAt (Knows(¬ f ), t)
KP( f , t) := HoldsAt (KP( f ), t)
KPNot( f , t) := HoldsAt (KP(¬ f ), t) (18)
ImpliesTT( f , f
0
, t) := HoldsAt
KP( f ⇒ f
0
), t
ImpliesTF( f , f
0
, t) := HoldsAt
KP( f ⇒ ¬ f
0
), t
ImpliesFT( f , f
0
, t) := HoldsAt
KP(¬ f ⇒ f
0
), t
ImpliesFF( f , f
0
, t) := HoldsAt
KP(¬ f ⇒ ¬ f
0
), t
We define the persistence laws for the KP and Implies
predicates equivalently to the persistence laws for the
HoldsAt predicate in the DEC axiomatization and use
special Initiates and Terminates predicates for each of
the KP and Implies which follow the very same ax-
ioms as the original DEC Initiates and Terminates do.
Contraposition and transitivity rules for the implica-
tion predicates is also implemented manually. Using
these special predicates and the additional persistence
and effect axioms for each predicate, our approach is
sound. This is easy to see as none of our translation
rules generates an implication which involves more
than two fluents. However, it is not complete as we do
not include HCD expansion as described in (Patkos,
2010), and we do not consider retroactive knowledge
gain about effects if more than one condition is un-
known.
4 EVALUATION
Reduction of the Planning Problem Specification.
Looking at the translation of PLIK to non-epistemic
EC, we find that through (9), for each conditional ef-
fect (C, E), |E| effect axioms of the form γ ⇒ π(e, f , t)
are generated; one for each effect literal l ∈ E. Look-
ing at the translation into the epistemic EC, we find
that many additional epistemic effect axioms are gen-
erated: (10) generates |E| effect axioms, (11) gen-
erates another |E| axioms and (12), (13) generate
|E| · |C| axioms each. Thus, each conditional effect
(C, E) of an action specification demands specifying
|E| non-epistemic effect axioms and |E| · (2 · |C|+ 2)
epistemic effect axioms.
For example, consider extending the above
moveRoomToRoom action by adding only two more con-
ditions (robot’s battery must be full and robot must
not be blocked) to the effect:
: e ff e c t ( if ( an d
op e n e d (? d oo r ) b at t e r y F ul l (? r ob o )
! b lo ck ed (? rob o ) i nR o o m (? robo , ? f r om ) )
the n ( an d i n R oo m ( ? robo , ? to )
! i nR o o m (? robo , ? f r om ) ) ) )
TowardsEpistemicPlanningAgents
315
Then, the epistemic EC version of the action is more
than 100 lines (11 000 bytes) of axioms which would
be very circumstantial to implement manually.
Use case: Move-through-door. We implemented a
use case with several robots moving through rooms
and one central planning agent controlling the robots.
Some robots are equipped with bumpers, so it is safe
to send them through a door without knowing whether
the door is open. The planning agent can only send a
robot through doors if it knows that the door is open
or that the robot has a bumper.
3
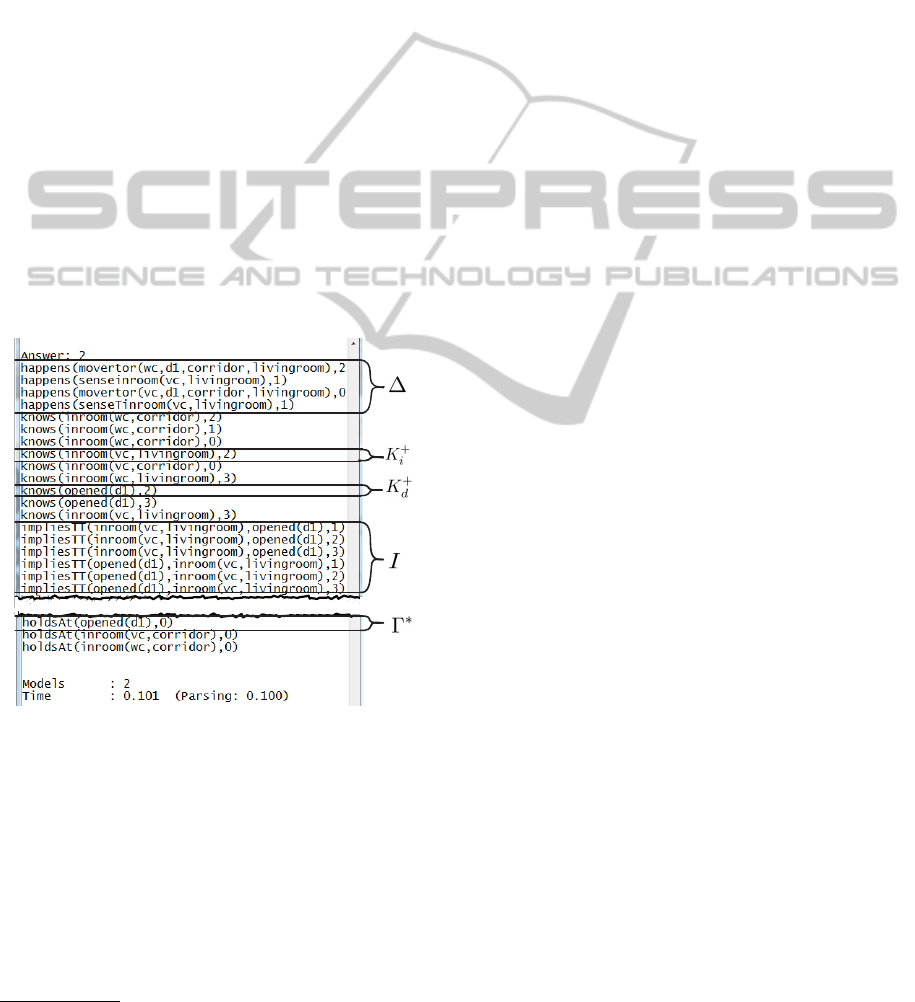
We investigated the stable models which are gen-
erated by the reasoner and it turned out that the
knowledge-level effects of actions are correctly han-
deled. Figure 2 shows how implications (I), plan (∆),
assumptions about the world (Γ
∗
), direct knowledge
gain (K
+
d
) as well as indirect knowledge gain (K
+
i
)
are successfully generated and modeled. The output
is that of a simple scenario with two robots, wc and
vc, where vc is robust and wc is not. The generated
plan involves sending the robust vc through a door at
t = 0, sensing its location at t = 1 and then, knowing
that the door must be open at t = 2, safely sending wc
through the door.
Figure 2: The output of the reasoner for the move-through-
door example with two robots (vc,wc).
Use Case: Poisonous Liquid. We adopted the poi-
sonous liquid-example from (Petrick and Bacchus,
2004). A thirsty agent has a liquid and does not know
whether it is poisonous. He can perform a drink-
action. If he drinks the liquid he will not be thirsty
anymore but he will get poisoned if the liquid is poi-
sonous. The agent can also pour the liquid on the
lawn, and if the liquid is poisonous the lawn will be
dead. Finally the agent can sense whether the lawn is
3
See the corresponding move-action in section 3.
alive. In the initial state, the agent only knows that he
is thirsty and not poisoned. The goal is that the agent
always knows that he is not poisoned and knows that
in the end he is not thirsty. The result is exactly 1 sta-
ble model, because there is only one possible world
in which the goal can be achieved: This is the world
where the liquid is not poisonous. The plan considers
that the agent first pours the liquid on the lawn, then
senses whether the lawn is dead, and finally, if the
lawn is not dead, drinks the liquid. For details con-
cerning the implementation of this use case we refer
the reader to (Eppe and Dylla, 2012).
5 CONCLUSIONS
In this paper we provide a method for the formaliza-
tion of epistemic planning problems. The main con-
tribution of our approach lies in the automated trans-
lation of planning problem specifications demanding
complete knowledge about the world into planning
problems which allow for incomplete knowledge. We
show that this translation safes a problem designer
the work of specifying additional |E| · (2 · |C| + 2)
knowledge-level effect axioms.To the best of our
knowledge there is currently no other planning system
which takes ordinary planning domains as input and
automatically compiles them into epistemic planning
domains, such that epistemic effects of actions can be
exploited to compensate missing or broken sensors.
Our approach is sound but not complete wrt.
DECKT and the possible worlds semantics of knowl-
edge. To achieve completeness we have to introduce
actions with non-deterministic effects, e.g. like toss-
ing a coin. Another issue that we need to consider
is knowledge acquisition about effects if more than
one condition is unknown. This goes along with what
(Patkos, 2010) calls HCD-expansion. However, this is
hardly possible without true reification and we don’t
know of any reasoner which supports this.
ACKNOWLEDGEMENTS
We thank Theodore Patkos who was always happy to
help us with details concerning DECKT and related
work. Funding by the German Research Associa-
tion (DFG) under the grants of International Research
Training Group on Semantic Integration of Geospa-
tial Information (IRTG SIGI) and SFB/TR8 Spatial
Cognition is gratefully acknowledged.
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
316

REFERENCES
Bertoli, P., Cimatti, A., Lago, U. D., and Pistore, M. (2002).
Extending PDDL to nondeterminism, limited sensing
and iterative conditional plans. In ICAPS Workshop
on PDDL.
Bertoli, P., Cimatti, A., Pistore, M., Roveri, M., and
Traverso, P. (2001). MBP : a Model Based Planner.
In IJCAI Proceedings.
Blackburn, P., de Rijke, M., and Venema, Y. (2001). Modal
Logic. Cambridge University Press.
De Giacomo, G. and Levesque, H. (1998). An Incremental
Interpreter for High-Level Programs with Sensing. In
Working Notes of the 1998 AAAI Fall Symposium on
Cognitive Robotics.
Drescher, C., Gebser, M., Grote, T., Kaufmann, B., K
¨
onig,
A., Ostrowski, M., and Schaub, T. (2008). Conflict-
Driven Disjunctive Answer Set Solving. In Interna-
tional Conference on Principles of Knowledge Repre-
sentation and Reasoning.
Eppe, M. and Dylla, F. (2012). An Epistemic Planning Sys-
tem Based on the Event Calculus. Technical Report
033-11/2012, University of Bremen, Bremen.
Gebser, M., Kaminski, R., K
¨
onig, A., and Schaub, T.
(2011). Advances in gringo series 3. In Proceedings of
the Eleventh International Conference on Logic Pro-
gramming and Nonmonotonic Reasoning.
Kowalski, R. (1986). A Logic-based calculus of events.
New generation computing, 4:67–94.
Lee, J. and Palla, R. (2012). Reformulating the Situation
Calculus and the Event Calculus in the General The-
ory of Stable Models and in Answer Set Program-
ming. Journal of Artificial Intelligence Research,
43:571–620.
Moore, R. (1985). A formal theory of knowledge and ac-
tion. In Hobbs, J. and Moore, R. C., editors, Formal
theories of the commonsense world. Ablex, Norwood,
NJ.
Mueller, E. (2005). Commonsense reasoning. Morgan
Kaufmann.
Patkos, T. (2010). A Formal Theory for Reasoning About
Action , Knowledge and Time. PhD thesis, University
of Crete - Heraklion Greece.
Patkos, T. and Plexousakis, D. (2009). Reasoning with
Knowledge , Action and Time in Dynamic and Uncer-
tain Domains. In IJCAI Proceedings, pages 885–890.
Petrick, R. P. A. and Bacchus, F. (2004). Extending the
knowledge-based approach to planning with incom-
plete information and sensing. In ICAPS Proceedings.
Reiter, R. (2001). Knowledge in action: Logical founda-
tions for specifying and implementing dynamical sys-
tems. MIT Press.
Scherl, R. and Levesque, H. J. (2003). Knowledge, action,
and the frame problem. Artificial Intelligence.
Shanahan, M. (2000). An abductive event calculus planner.
The Journal of Logic Programming, pages 207–240.
Thielscher, M. (1998). Introduction To The Fluent Calcu-
lus. Link
¨
oping Electronic Articles in Computer and
Information Science, 3(14).
Thielscher, M. (2005). FLUX : A Logic Programming
Method for Reasoning Agents. Theory and Practice
of Logic Programming, 5(4-5).
TowardsEpistemicPlanningAgents
317
