
ERAM
Evacuation Routing using Ant Colony Optimization over Mobile Ad Hoc Networks
Alejandro Avilés del Moral
1
, Munehiro Takimoto
1
and Yasushi Kambayashi
2
1
Department of Information Sciences, Tokyo University of Science, Tokyo, Japan
2
Department of Computer & Information Engineering, Nippon Institute of Technology, Saitama, Japan
Keywords: Ant Colony Optimization, Global Positioning System, Mobile Ad Hoc Networks, Mobile Agents,
Multiagent Systems.
Abstract: This paper proposes a distributed multi-agent framework for discovering and optimizing evacuation routes
on demand. We name it Evacuation Routing using Ant Colony Optimization over Mobile Ad hoc Networks
(ERAM). Taking advantage of ant colony optimization (ACO) on mobile ad hoc networks (MANETs)
composed of smartphones with geo-location capabilities, ERAM aims for adaptability and layout
independence, relying exclusively on crowd’s knowledge during mass evacuations. Such knowledge is
inserted into the system: actively, by users’ indication of having reached safe areas on their smartphones;
and passively, by smartphones tracking their own movement. In the framework, agents migrate through
nodes of a MANET towards safe areas based on an indirect communication mechanism called stigmergy,
which is a behaviour that social insects show. Once an agent finds such an area, it traces its path backwardly
collecting geographical information of intermediate nodes for composing an evacuation route. During the
backward travel, agents lay pheromone down while they migrate back based on the ACO algorithm,
strengthening quasi-optimal physical routes, and hence guiding succeeding agents. This scenario is
analogous to data-packet routing on Internet or resource discovery on P2P networks, except it routes people
through physical environments towards safe areas instead.
1 INTRODUCTION
In cases of emergency, people in a building, facility
or even whole cities might need to be evacuated.
Known routes, however, found to be congested or
compromised can lead crowds to panic due to
occasional lack of indications to reach a safe area.
Therefore, it is desirable to have an infrastructure-
less adaptable framework to assist finding routes on
demand without any previous specific preparation of
roads or buildings in order to increase the survival
rate.
We apply swarm intelligence based routing
mechanisms that are well known to be useful in
virtual environment as shown in (Ducatelle et al.,
2010); (Ducatelle, 2007) and (De Rango and
Socievole, 2011) for crowd flow guidance in the real
world through handheld devices such as
smartphones.
Nowadays, smartphones are increasingly
relevant in daily life among all kinds of users. This
incessant growth is derived from some features such
as portability, which traditional computers lack. This
feature as well as relatively small size can be applied
to solve old problems in new ways. In particular,
there are two key features for the implementation of
our framework. Whereas the smartphone’s wireless
connectivity allows the deployment of a swarm
intelligent system, the built-in Global Positioning
System (GPS) reception can provide information
about the physical environment.
The combination of these technologies on a
single portable device along with swarm
mechanisms assists to find not only main evacuation
routes but also alternative ones, while taking in
account of the congestion in the routes. The found
routes can reflect unpredictable human behavior
through dynamically supporting safety policies
(Proulx, 2001).
We propose a distributed multi-agent distributed
framework for discovering optimized evacuation
routes on demand. We henceforth call this
framework Evacuation Routing Using Ant Colony
Optimization over Mobile Ad hoc Networks
118
Avilés del Moral A., Takimoto M. and Kambayashi Y..
ERAM - Evacuation Routing using Ant Colony Optimization over Mobile Ad Hoc Networks.
DOI: 10.5220/0004261301180127
In Proceedings of the 5th International Conference on Agents and Artificial Intelligence (ICAART-2013), pages 118-127
ISBN: 978-989-8565-38-9
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

(ERAM). This framework came from AntHocNet
(Di Caro et al., 2004), (Di Caro, Ducatelle, &
Gambardella, 2005) and (Di Caro et al., 2005), a
framework for routing in Mobile Ad hoc Networks
(MANETs) and the algorithm for resource discovery
in P2P networks presented in (Kambayashi and
Harada, 2007) and (Kambayashi and Harada, 2009).
Both approaches use Ant Colony Optimization
(ACO) providing indirect communication between
agents in order to achieve self-organized
optimization.
ACO is a biologically inspired framework based
on ant foraging behaviors, as proposed in (Colorni,
Dorigo, & Maniezzo, 1992) and (Dorigo and
Gambardella, 1997). Ant agents laying pheromone
down reinforces paths that are more likely to lead
towards fruitful nodes. This way, pheromone level
indicates the goodness of a node regarding the goal,
and by constantly being modified by ant agents, the
system get quasi-optimized in run-time. This indirect
method is called stigmergy.
The structure of the balance of this paper is as
follows. In the second section, we describe an
evacuation scenario in which ERAM performs the
guidance for the users. The third section describes
ERAM framework. ERAM consists of several static
and mobile agents. The static agents interact with
users and store routing information, and the mobile
agents effectively work together with stigmergy to
find optimal evacuation routes. The fourth section
demonstrates the usefulness of the framework with
the results of numerical experiments on a simulator
we built. Finally, the fifth section discusses
conclusion and future works.
2 SCENARIO
ERAM presents a novel hybrid solution for network-
physical environment routing, a field that has not
investigated so far. In contrast with other swarm
intelligence based routing frameworks such as the
ones proposed in (Kambayashi and Harada, 2007)
and (Ziane and Melouk, 2005), which basically
focus on data packet routing over networks, ERAM
aims to discover physical resources over physical
layouts instead of virtual ones. ERAM, however,
uses networks as a means to locate those resources,
and thus previous researches on ACO routing
provide a robust background.
2.1 Scenario Description
As derived from the previous section, in an
evacuation scenario resources correspond to physical
safe areas that users proactively mark on their
smartphones as soon as they are reached, each
referred to as node. Paths discovered with ERAM
take into account physical layouts. The GPS is used
to provide geographic information that will be
collected on ERAM as described later. This
information is also used to evaluate the congestion
of crowd flows and to optimize them.
In order to perform resource discovery and
routing, active and passive sources of information
are required. Whereas users provide active input
when they reach safe areas, smartphones provide
passive input by constantly storing GPS tracks.
Finally, optimal routing discovery both in
network and in physical environments is achieved by
indirect communication through migrations of
mobile agents over nodes of a MANET applying the
ACO algorithm described in the next section.
In order to make the scenario mentioned above
technically feasible, we assume that each node has
the following functionalities:
Built-in Wi-Fi connectivity to construct the
MANET with other smartphones.
Making use of decent GPS signal.
2.2 Scenario Difficulties
A real implementation of ERAM framework,
however, implies some difficulties mainly related
with the reliability of the information.
One problem, which is easier to handle, is that of
relying on human knowledge in a stressful situation
to obtain the routes. To deal with this, the
framework assumes that, at least, a few people are
able to reach a safe area, i.e. shelter, out of the
building, etc. and mark it on their smartphone. Then,
by the unsupervised usage of the pheromone, those
nodes closer to these areas will be more likely to
lead people to a secure one.
Another problem, not yet fully addressed in this
paper, is the impossibility to avoid fake marking of
safe areas. A proposal of solution is weighting safe
flags in relation of its geographic density based on
the fact that the majority of people will not lie. In
this manner, the more safe flags of which nodes are
close to, the more likely they are to attract mobile
agents, and thus, to produce correct evacuation
routes avoiding those leading to fake safe areas.
Another way to enforce reliability is a distributed
trust protocol, as proposed in (Nakamoto, 2008),
ERAM-EvacuationRoutingusingAntColonyOptimizationoverMobileAdHocNetworks
119
which makes almost impossible to fake the system.
Additionally, GPS signal is maybe the most
troublesome aspect of the framework. It is hardly
available indoors and obstacles like trees or
buildings outdoors can easily hinder precision. In
order to obtain precise GPS samples, there are some
solutions widespread at the moment. One of them is
the usage of differential GPS, which relies on static
devices with known position, if available. Another
one is using external sensors or measurement of Wi-
Fi signal to estimate absolute position like the one
proposed in (Woodman and Harle, 2008), but this
relies on infrastructure or preloaded information.
There are also more innovative approaches such as
(Bejuri et al., 2011), which propose a taxonomic
GPS that would provide precise and ubiquitous
positioning.
3 ERAM FRAMEWORK
In this section, ERAM framework is described in
detail. It first covers the agents that are involved in
the consecution of the goal, conditions of the
algorithm to guarantee the negotiability of the
evacuation route, and the formal definition of the
pheromone calculation.
3.1 Agents
Due to the fact that similarities found in
formulations of ERAM’s scenario with the one
proposed in (Kambayashi and Harada, 2007), the
solutions are also similar. Especially, its concept of a
set of collaborative static and mobile agents for
discovering resources in P2P networks has also been
adapted to ERAM. This concept is required to deal
with the complexity and uncertainty of what hybrid
network‐physical scenario presents.
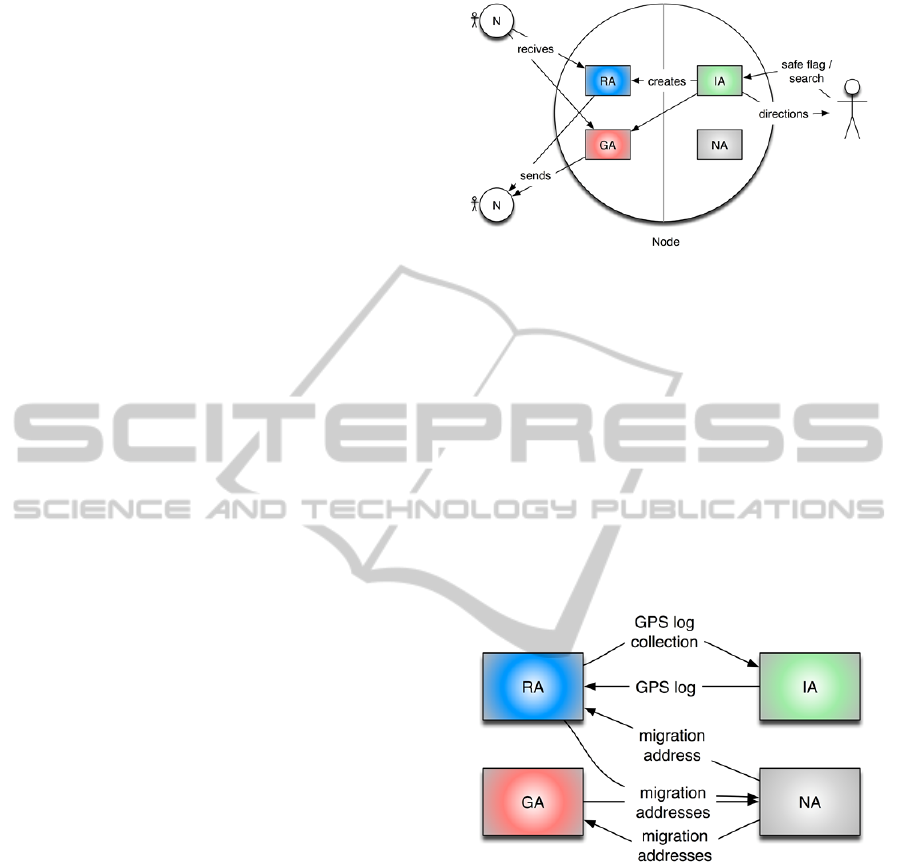
Fig. 1 depicts the different kinds of agents
participating in the framework. The following
descriptions are brief explanation of their tasks.
1. Information Agent (IA): it is a static agent
resides on each node. It is in charge of
perceiving physical context as well as storing
knowledge about its hosting node. It also acts as
an interface with the user, receiving input and
providing directions to follow.
2. Node management Agent (NA): it is a static
agent also residing on each node. It is in charge
of storing knowledge of the network context,
namely storing information about other nodes.
3. Goal Agent (GA): it is a mobile agent that
floods the network with information about the
Figure 1: ERAM participators. Nodes host mobile agents
(RAs and GAs), and static agents (IA and NA). Users
communicate with IA. IA creates RAs and GAs. Mobile
agents migrate towards other nodes.
safe area recently reached. An IA on a safe node
creates GA.
4. Routing Agent (RA): it is a mobile agent that
tries to find safe nodes in order to obtain
evacuation routes. IA on a node in search of
evacuation routes, which is called swarm node,
creates RA.
The interactions between them can be illustrated as
shown in Figure 2. We describe the details of each
agent below.
Figure 2: Interactions between agents. Here, IA provides
the node GPS log and receives GPS log collections for
calculations; NA provides IP address to mobile agents,
and both RAs and GAs updates pheromone value on the
NA.
3.1.1 Information Agent (IA)
Each node hosts an IA and it keeps track of the GPS
log by taking position samples periodically.
Whenever another one node comes within Wi-Fi
range of the node on which the IA resides, it starts
the handshaking protocol in order to initiate session.
This can be achieved as shown in SLS (Gajurel and
Heiferling, 2009), but storing the whole GPS log
instead of a single position. Adjacent connected
nodes constantly exchange GPS logs between IAs
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
120

and all received information is stored in the NA. We
describe NA in the next section.
User can interact with the IA by activating the
safe flag or by activating the evacuation search.
These two modes are mutually exclusive.
Safe flagged: When a user reaches a safe area,
he or she hoists the safe flag in his or her
smartphone. Once the safe flag is activated,
the IA starts creating GAs periodically in
order to flood the network with information
about the safe area position.
Searching evacuation: When a user is in need
of evacuation route, he or she sets his or her
smartphone in search mode. In this process,
the IA produces RAs constantly, making them
migrate to search negotiable paths towards
safe areas. Once one RA returns from a safe
flagged node storing GPS logs of intermediate
nodes, the IA composes an evacuation route
from them. If the estimated time of the new
evacuation route is better, the current one is
replaced by it. Finally, the route is provided to
the user in a form of directions to be followed.
As pointed in (Rodriguez and Amato, 2010) and
(Rodriguez and Amato, 2011), routes composed of
pairs of positions should be smoothened to reduce
unnecessary loops.
3.1.2 Node Management Agent (NA)
In addition to an IA, every node hosts an NA. The
NA keeps information about neighbour nodes such
as IP address, GPS log and other data used for
pheromone calculation. Each entry is created when
the IA successfully initiates session with neighbour
nodes, which are updated as mobile agents arrive
and give new information.
Table 1: Knowledge encoded within an NA.
IP:port GPS log Jumps SAV GA id
9.163.251.45:50000 {(3,4), ...} 4 0.8 2435
92.71.112.26:50001 {(0,1), ...} 1 0.1 8431
… … … … …
As shown by Table 1, an NA encodes the basic
knowledge in its matrix to cover the following
fields.
Jumps: the number of hops from a safe
flagged node. It is updated by GAs.
Speed Ahead Value (SAV): this encodes
congestion level and it is modified by RAs. It
is covered later in detail.
GA id: the unique identification of the GA
that last updated the entry. This is used for
stopping GAs from migrating endlessly.
When mobile agents need to migrate, they request
the NA to provide them the IP addresses of the
nodes to which they migrate next.
3.1.3 Goal Agent (GA)
A safe flagged node’s IA creates GAs in order to
disseminate the information in the network about the
safe area. The GA, therefore, requests the NA
information of all the connected nodes, and clones
itself on each of them. As the GA migrates through
the network, it counts the number of hops it has
performed. When it steps into a new node, this
information is provided to the NA of that node in
order to update the Jumps entry of the neighbouring
nodes. This information is used for subsequent
pheromone calculation.
Figure 3: Migration activity of a GA through a simple ad
hoc network. Numbers represent Jumps value. Arrows
with an X at the end mean the GA is killed.
Figure 4: Condition for RA to perform a migration.
The terminating condition of GA’s migration is
as follows. When it is created, every GA has a
unique identification. Thus, if it steps into a node
with the same GA id as it has, it means that has been
previously visited by one of the other clones of the
GA, and therefore it is killed. GA’s life span is
graphically explained in Figure 3.
3.1.4 Routing Agent (RA)
A routing agent is an agent created by an IA on a
node that searches for safe areas. The RA migrates
while it satisfies the condition where a GPS log on a
ERAM-EvacuationRoutingusingAntColonyOptimizationoverMobileAdHocNetworks
121

new node to which it is migrating has some
intersections with the GPS log of the current node as
shown in Figure 4. It means that there are some
intersections between GPS logs such as a chain, and
this is possible because the NA of the hosting node
stores the GPS log of nodes surrounding that node.
This condition guarantees that nodes can
physically reach the safe areas following paths
derived from GPS logs without meeting any
obstacles.
In order to optimize this evacuation route, the
RA will choose the node with the highest
pheromone value at present. As ACO states, this is
merely probabilistic as explained in (Di Caro et al.,
2006); therefore, there are situations in which
random paths are chosen in order to explore other
possible evacuation routes.
If a situation in which a sequence of connecting
nodes meets the mentioned condition and it reaches
a safe flagged node, the RA becomes a backward
RA immediately. The backward RA follows the
same path as the forward RA but in the opposite
direction.
There may be some situations in which the
forward RA hits node having an evacuation route
already created. In this case the RA will copy the
evacuation route and become a backward RA.
Figure 5: When GPS logs are not exactly intersecting but
proximity can be used for calculating the evacuation route.
On its way back, the RA collects the GPS logs of
the nodes while laying pheromone down in the NAs
on the nodes. This pheromone, represented by Speed
Ahead Value (SAV), reflects the congestion present
along the path. When the RA hits the original node
where it was created, the GPS logs are provided to
the IA. Once this happens the evacuation route is
established.
3.2 Route Construction
The route composed from GPS logs is expected to
be an evacuation route because a chain of
intersecting GPS logs ends in a safe flagged node,
which is in a safe area.
This is the expected result of an algorithm used
to compose the evacuation route, when intersecting
GPS logs have been received. The composed route
avoids loops and unnecessary paths by deleting
those parts that do not lead towards a safe flagged
node.
As depicted in Figure 5, sometimes the GPS logs
may be not exactly intersecting but should be
considered for having physical reachability. In such
a case, fuzzy approaches provide flexibility for
dealing with uncertainty as well as with constraints
that accepts some degree of error.
In our system, instead of binary functions
returning whether some intersections exist or not, a
radial basis function is utilized to weaken
intersection constraints. Notice here that such a
radial basis function needs a predefined threshold of
distance to be regarded as an intersection between
GPS tracks.
3.3 ACO Algorithm
The following equation determines the pheromone
level of a node.
pheromone
n
speed
jumps
∗SAV
(1)
speed
n
is the average speed of node n, using the
GPS track stored in its IA. The length of the time
window of the GPS track affects the sensibility of
this parameter. This implies that the shorter the
length of the window becomes, the fewer samples
for calculating the parameter we get. That results in
a highly responsive value, causing the last few
seconds of the movement to be reflected more
precisely.
jumps
n
reflects how many migrations are needed
to reach the closest safe flagged node. Due to an
agents wireless capabilities this is a heuristically
determined parameter as it positively estimates how
far the node is from a safe area. Even if agents can
migrate through obstacles such as walls, human
beings will not be able to pass through.
SAV
n
stands for Speed Ahead Value. It serves the
purpose of estimating congestion ahead. For SAV,
having a lower value means that nodes ahead are
moving more slowly, therefore the probability of
congestion is higher and RAs will be less likely to
follow these nodes while seeking a safe flagged
node.
As described in (Kambayashi and Harada, 2007),
our framework does not implement a pheromone
decay system through evaporation. Instead, thanks to
RA constantly migrating through the network, this
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
122

value is frequently updated and serves the purpose
of pheromone decay mechanism.
SAV of any safe node is 1. SAV of a non-safe
given node n starts at 1 and it is recalculated based
on: its SAV previous value and both the SAV and
average speed from the node straight ahead. The RA
carries that information. In this way, knowledge
about congestion is propagated backwardly through
the network while updating each node through
iterations.
The formal calculation is as follows.
1
2
1
3
1
(2)
Where 01, and
1
w
1
, w
2
and w
3
are predefined weights that
determine how SAV will be modified through
iterations. Fine-tuning these three constants is a key
to obtain a self-optimizing routing system.
w1: represents how slowly SAV is modified
through iterations. The higher the weight is,
the slower SAV will be affected. Having
values near to 1 means that it will hardly
change, and near to 0 means that will be
overridden every iteration.
w2: represents how much overall congestion
ahead from node n influences its SAV
calculation. Having values near to 1 means
that initial SAV will be carried all the way
back.
w3: represents how much the speed of the
node straight ahead influences on the node
SAV. Having values near to 1 means that
SAV only represents congestion of the node
straight ahead.
In addition, the variable speedNorm is a
normalizer of speed that keeps the value between 0
and 1.
In summary, the pheromone level of a node is
directly proportional to the average speed of
movement. The pheromone level is inversely
proportional to the number of migrations to the
closest safe area. Thus, the pheromone level is
penalized by distance from a safe area and
congestion such as a pheromone decay mechanism.
4 RESULTS
In order to demonstrate the effectiveness of our
framework, we have built a simulator and conducted
Figure 6: Simulation screenshot with 300 nodes (10%
swarm). Blue nodes are informed nodes, pink nodes
swarm nodes, and red nodes swarm nodes with evacuation
route. Green grounds represents safe area, white ground
floor within the building, and black impassable walls. It
also shows Wi-Fi connections between nodes, GAs and
RAs, and GPS logs in red trajectories.
numerical experiments. The results addressed in this
section were acquired using a simulation
environment that provides graphical representation
of the framework and statistical results for further
analysis. We call this simulation environment
ERAMsim.
First, we give a brief explanation of the
simulator; second, we describe the simulation
settings; and last, we discuss the simulation results.
4.1 Simulator Overview
ERAMsim is a software program developed for
running basic simulations of ERAM framework.
Providing simplified both physical and network
environment simulations, it implements the ACO
algorithm as well as the behaviour of individuals
trying to reach a safe area in a floor plan, as depicted
in Figure 6.
It can be perceived that white ground represents
the interior of a building whereas green grounds are
safe areas outside the building and black lines are
walls. Consequently, the basic unit for space is the
pixel, and the time is discrete.
The simulator takes account of physical
constraints such as maximum density of people or
the impossibility of them to pass through others,
producing bottlenecks in doors. It also assumes that
there are some nodes that already know where to go,
referred as to informed nodes, and others using
ERAM exclusively, swarm nodes. As soon as any of
them reaches a safe area it becomes a safe node,
ERAM-EvacuationRoutingusingAntColonyOptimizationoverMobileAdHocNetworks
123

starting to produce GAs, and then walking away
from the building.
4.2 Simulation Settings
Table 2 shows the default values of the main
parameters used for running the simulator.
These parameters are clarified as follows:
‘Total nodes’ determines how many
individuals-smartphone are participating in the
evacuation. 200 nodes provide a density of
4.71%.
‘Swarm nodes’ configures the percentage of
the total nodes using ERAM to find their way.
‘GPS log length’ refers to the maximum
amount of GPS samples that are stored within
a NA with a frequency of 0.25 samples/round.
‘Wi-Fi range’ determines the range, in pixels,
of the Wi-Fi signal of the smartphones.
‘ACO random’ determines the chance of a RA
to migrate randomly instead of following the
best pheromone value.
w
1~3
are the weights for SAV calculation.
‘GA/RA cooldowns are the number of rounds
that takes for a node to produce the next
mobile agent.
Table 2: Parameters default values.
Parameter Value Parameter Value
Total nodes 200 w
1
0.1
Swarm nodes 10% nodes w
2
0.5
GPS log length 100 samples w
3
0.4
Wi-Fi range 70 pixels GA cooldown 50 rounds
ACO random 10% RA cooldown 5 rounds
We use discrete time, a floor plan with
800px*600px, and nodes represented by
circumferences of 6px radius moving at a maximum
speed of 2px/round. Approximating these values to
meters, nodes are 70cm diameter circumferences,
from which it can be derived that a pixel is 5.83cms
and they can move up to 1.16 m/s in a 46.7m x 35m
physical environment.
Finally, default values have been chosen for the
purpose of keeping the performance metric low,
which enables the behavior to be easily analyzed
through modifying them.
4.3 Simulation Results
The results focus on the success rate of finding the
evacuation route rather than on the overall route
optimization. This is due to the fact that for
measuring the improvement, comparison between
virtual evacuation time using ERAM and real
evacuation time is required, and in order to obtain
the real one, sophisticated human behaviour
simulation is needed.
In these results, the performance is measured as
the success rate of finding evacuation route in terms
of the previously defined variables previously
defined. Assuming that all swarm nodes that
successfully reach a safe area are caused by the
usage of ERAM, success rate of the route discovery
algorithm can be formally defined as follows.
success rate
swarmnodessaved
swarmnodes
(3)
Because of the probabilistic nature of the simulator,
in order to get reasonable results, each sample
reflects the average of five simulations using the
same parameter values.
4.3.1 GPS Log Length
When configuring a real implementation of ERAM,
one of the main parameters is the GPS log length.
Every node needs to exchange this information
constantly with connected nodes in order to reflect
lag-free geographic information. This data exchange
is critical for the framework but it is also the most
bandwidth consuming, and thus, it is crucial to size
it optimally.
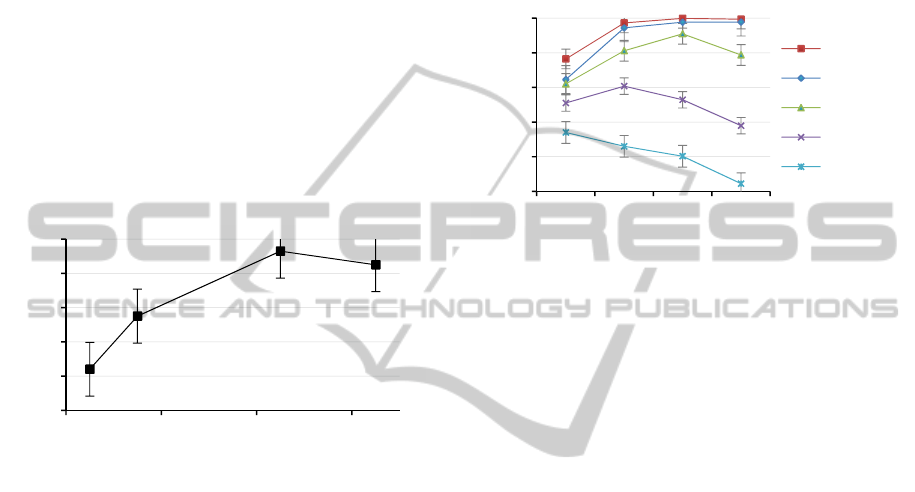
Figure 7: Success rate depending on GPS log length.
As can be seen in Figure 7, the longer the length
of the GPS log is, the higher the success rate of route
discovery becomes. This is caused by the fact that, it
is more probable to find intersections between GPS
logs, and consequently for the system to allow more
agent migrations. By easing agent migration, route
discovery of swam nodes increases and so does the
success rate.
Nevertheless, this metric is mainly bounded by
two facts, both responsible of the plateau at around
70% success rate in Figure 7. The first one is related
0%
20%
40%
60%
80%
100%
10 50 100 150 200 250 300 350 400
GPSloglength(samples)
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
124
to a physical constraint and is impossible to avoid. It
is that regardless the GPS log length there might be
nodes located where others have never come,
making any GPS intersection nonexistent. The
second one has to do with technical limitations and
is interesting as can be predicted more easily. It is
that although there are GPS intersections, if the Wi-
Fi signal is much shorter than the GPS log, nodes
cannot be aware of it, and therefore migrations will
not take place.
4.3.2 Wi-Fi Signal
Studying how Wi-Fi signal influences the success
rate is interesting, because it not only determines the
bounding the GPS log length, but also it eventually
provides minimum technical requirements for the
ERAM framework to work properly.
Figure 8: Success rate depending on Wi-Fi range.
Figure 8 shows an improvement in success rate
similar to the one exposed for the GPS log length.
Again, by increasing the Wi-Fi signal more nodes
will be connected in the MANET, and this way,
more GPS log intersections will be found by agents.
On the other hand, the GPS log length also
bounds the improvement of Wi-Fi signal. Regardless
the range of the signal connecting nodes, technically
allowing agents to migrate, when GPS logs are not
long enough, intersections will hardly occur and
then migration constraint will not be satisfied.
With this simulation configuration, having a Wi-
Fi signal 1.5 times wider than the GPS log length
produces a success rate of 93%.
4.3.3 Density and Swarm Nodes
Finally, we discuss the interest of using ERAM
depending on the density of people in the evacuation
and how the framework performs when only a few
of them know the way to a safe zone.
Note that swarm nodes in this simulation walk
towards safe zones only when they have obtained an
evacuation route through ERAM. Hence
measurements do not concern about 0% or 100%
swarm nodes scenarios. Having none swarm node
would mean there is nothing to measure, and having
all swarm nodes would mean no human knowledge
about safe areas and therefore success rate equal to
zero.
Figure 9: Success rate depending on density and
percentage of swarm nodes.
As shown in Figure 9, as density grows the
overall success rate increase, highlighting that
ERAM presents superior performance for mass
evacuations. Given the map the simulation uses, 100
nodes mean a density of 2.36%, and 500 nodes
11.78%.
This improvement is derived from two main
facts: first of all, the topology of the MANET mesh
is more interconnected; and secondly, more GPS
logs stored in the system leads to more GPS
intersections.
Another dimension that Figure 9 explores is the
impact of swarm nodes percentage. As can be
observed, as the number of swarm nodes increases
the success rate decreases in low-density settings.
This can be explained because the more swarm
nodes participating in the evacuation, the less
informed nodes, and thus, only a few safe nodes will
be produced. In addition, having low densities
makes the MANET connectivity too reduced,
producing some isolated sub-MANETs with fewer
chances to transmit agents towards one of those
scarce safe nodes.
When density increases, however, and
consequently so does MANET connectivity, RAs
laying pheromone down makes, even for highly
isolated MANETs, the success rate of this
migrations increase up to almost 100% of swarm
nodes. Eventually this makes almost all the swarm
nodes reach safe areas even when only a few nodes
know the way to the safe area.
0%
20%
40%
60%
80%
100%
50 75 100 125 150 175 200
Wi-Fi range (pixels)
0%
20%
40%
60%
80%
100%
10% 40% 70% 90%
Swarm nodes (%)
500 nodes
400 nodes
300 nodes
200 nodes
100 nodes
ERAM-EvacuationRoutingusingAntColonyOptimizationoverMobileAdHocNetworks
125

These results indicate that encouraging the active
usage of ERAM (swarm nodes) for evacuations in
scenarios such as public buildings, sport events, or
cities will provide good results.
It should be clear that this metric is extremely
pessimistic due to the simplistic human behavior
simulation. As in a real situation a swarm node can
become an informed one asking other people,
following signs or by visual contact with the safe
area.
5 CONCLUSIONS AND FURTHER
WORKS
ERAM represents a novel usage of ACO for hybrid
environments. Routing people by the passive and
active usage of the smartphone opens a new horizon
of study. This project provides not only the first
formal definition of the framework but also a
software tool to test it.
A great amount of uncertainty and imprecision
will be present in a real scenario because of the
usage of commercial GPS, and unsuitable conditions
for geo-location. The simulation results, however,
indicate that the direction of our investigation is
right. It is now clear that smartphone and ACO are a
suitable combination to develop the new safe
evacuations systems.
Our experiments on the simulator so far show
promising results regarding the evacuation route
discovery algorithm, especially for high-density
evacuation. This first iteration of ERAM is,
however, the initial stage, and still far from
achieving the optimal evacuation routing. Further
works can be summarized in three main topics:
framework refinement, simulator realism, and
extensive experimentation.
In regard of framework refinement, first,
pheromone calculation of the ACO algorithm needs
to find the proper values for weights. One approach
to solve this while at the same time making it even
more flexible should be applying some sort of neural
network to dynamically adapt the weights to the
different type of context, i.e. pedestrian or car
evacuations. It is also interesting incorporate into the
framework solutions for scenario difficulties as
described in section 2.
ERAMsim needs further works in order to
demonstrate the feasibility of the framework in
different scenarios under much more complex
environments. For doing so, it will be necessary to
adopt more realistic simulation approaches. On the
one hand, a realistic network simulation would allow
measuring the congestion of agents’ interactions
produce as well as obtaining the actual time it takes
to find an evacuation route. On the other hand,
utilizing physical environment simulations as shown
in (Rodriguez and Amato, 2010) and (Rodriguez and
Amato, 2011) would allow to measure how route
optimizing routing improves survival rate.
The simulator, although must be improved, is
good enough to show a current state and to explore
the limits of this framework by retrieving results
beyond the ones shown in this paper.
Concluding, and regarding the feasibility of a
future real implementation, we believe that we have
enough technological components to implement
ERAM. The usage of smartphones is being
widespread. We are trying to implement an ad hoc
network using solely smartphones. Upon completion
of such network, it is possible to have a mobile agent
system without explicit network infrastructures. It is
also possible to have alternative location system
other than GPS. For example, it should be relatively
easy to construct infrastructure using RFID rather
than GPS that provides the precision needed to
provide dynamic routing in controlled environments
such as museums for providing new features besides
evacuation routing.
REFERENCES
Bejuri, W. M., Mohamad, M. M., & Sapri, M. (2011).
Ubiquitous Positioning: A Taxonomy for Location
Determination on Mobile Navigation System.
International Journal of Signal & Image Processing ,
2 (1), 24-34.
Colorni, A., Dorigo, M., & Maniezzo, V. (1992).
"Distributed Optimization by Ant Colonies". Proc. 1st
European Conference on Artificial Life, (pp. 132-142).
Cambridge.
De Rango, F., & Socievole, A. (2011). "Meta-Heuristics
Techniques and Swarm Intelligence in Mobile Ad Hoc
Networks". In Mobile Ad-hoc Networks: Applications.
Di Caro, G., Ducatelle, F., & Gambardella, L. (2006). "An
analysis of the different components of the AntHocNet
routing algorithm". Proc. 5th International Workshop
on Ant Colony Optimization and Swarm Intelligence
(ANTS2006). Brussels.
Di Caro, G., Ducatelle, F., & Gambardella, L. (2005).
"AntHocNet: An adaptive nature-inspired algorithm
for routing in mobile ad hoc networks". EUROPEAN
TRANSACTIONS ON TELECOMMUNICATIONS, 16,
pp. 443-455.
Di Caro, G., Ducatelle, F., & Gambardella, L. (2004).
"AntHocNet: an Ant-Based Hybrid Routing Algorithm
for Mobile Ad Hoc Networks". Proc. 8th International
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
126

Conference on Parallel Problem Solving from Nature
(PPSN VIII). Birmingham,.
Di Caro, G., Ducatelle, F., & Gambardella, L. (2005).
"Using Ant Agents to Combine Reactive and Proactive
Strategies for Routing in Mobile Ad Hoc Networks".
International Journal of Computational Intelligence
and Applications (IJCIA) , 5 (2), 169-184.
Dorigo, M., & Gambardella, L. (1997). "Ant Colony
System: A Cooperative Learning Approach to the
Traveling Salesman Problem". IEEE Transactions on
Evolutionary Computation, 1, pp. 53-66. Brussels.
Ducatelle, F. (2007). "Adaptive Routing in Ad Hoc
Wireless Multi-hop Networks". PhD Thesis, Università
della Svizzera Italiana, Istituto Dalle Molle di Studi
sull'Intelligenza Artificiale, Lugano.
Ducatelle, F., Di Caro, G., & Gambardella, L. (2010).
"Principles and applications of swarm intelligence for
adaptive routing in telecommunications networks".
Swarm Intelligence , 4 (3).
Gajurel, S., & Heiferling, M. (2009). "A Distributed
Location Service for MANET Using Swarm
Intelligence". Proc. IEEE Mobile WiMAX Symposium,
(pp. 220-225).
Kambayashi, Y., & Harada, Y. (2007). "A Resource
Discovery Method Based on Multi-agents in P2P
Systems". Proc. 1st KES International Symposium on
Agent and Multi-Agent Systems: Technologies and
Applications, (pp. 364-374). Verlag.
Kambayashi, Y., & Harada, Y. (2009). "Integrating Ant
Colony Optimization in a mobile-agent based resource
discovery algorithm". Proceedings of the IADIS
International Conference on Intelligent Systems and
Agents (pp. 149-158). Antonio Palma dos Reis.
Nakamoto, S. (2008). "Bitcoin: A Peer-to-Peer Electronic
Cash System". From Bitcoin:
http://bitcoin.org/bitcoin.pdf
Proulx, G. (2001). "Occupant Behaviour and Evacuation".
Proc. 9th International Fire Protection Symposium,
(pp. 25-26).
Rodriguez, S., & Amato, N. (2010). "Behavior-based
evacuation planning". Proc. IEEE International
Conference on Robotics and Automation (ICRA), (pp.
350-355). Anchorage.
Rodriguez, S., & Amato, N. (2011). "Utilizing Roadmaps
in Evacuation Planning". Proc. Computer Animation
and Social Agents, (pp. 67-73).
Woodman, O., & Harle, R. (2008). Pedestrian localisation
for indoor environments. Proc. of the 10th
international conference on Ubiquitous Computing
(pp. 114-123). New York: ACM.
Ziane, S., & Melouk, A. (2005). "A swarm intelligent
multi-path routing for multimedia traffic over mobile
ad hoc networks". Proc. Q2SWinet, (pp. 55-62). New
York.
ERAM-EvacuationRoutingusingAntColonyOptimizationoverMobileAdHocNetworks
127
