
Grid-based Spatial Keypoint Selection for Real Time Visual Odometry
Volker Nannen
1∗
and Gabriel Oliver
2†
1
Departament d’Arquitectura i Tecnologia de Computadors, Universitat de Girona, Girona, Spain
2
Departament de Ci`encies Matem`atiques i Inform`atica, Universitat de les Illes Balears, Palma de Mallorca, Spain
Keywords:
Robot Vision, Robot Navigation, Real-time Systems, Robust Estimation, Spatial Distribution.
Abstract:
Robotic systems can achieve real-time visual odometry by extracting a fixed number of invariant keypoints
from the current camera frame, matching them against keypoints from a previous frame, and calculating
camera motion from matching pairs. If keypoints are selected by response only they can become concentrated
in a small image region. This decreases the chance for keypoints to match between images and increases the
chance for a degenerate set of matching keypoints. Here we present and evaluate a simple grid-based method
that forces extracted keypoints to follow an even spatial distribution. The benefits of this approach depend
on image quality. Real world trials with low quality images show that the method can extend the length of
a correctly estimated path by an order of magnitude. In laboratory trials with images of higher quality we
observe that the quality of motion estimates can degrade significantly, in particular if the number of extracted
keypoints is low. This negative effect can be minimized by using a large number of grid cells.
1 INTRODUCTION
Precise real-time odometry is an active research field
in underwater robotics. Autonomous underwater ve-
hicles usually rely on acoustic baseline stations and/or
dead reckoning for global localization. When operat-
ing close to the ground or to equipment that needs in-
spection and manipulation, visual odometry provides
a high level of precision at a relatively low cost. Mo-
tion can be estimated from a series of camera frames
by tracking a set of images features or keypoints that
are invariant under various image transformations.
After a first processing step, a camera frame will of-
ten yield thousands of potential keypoints, each with
a response value (e.g., contrast) that is specific to the
feature detection method. Because of the computa-
tional cost involved in constructing an invariant key-
point descriptor and matching it against another set
of keypoint descriptors, from the initially large num-
ber of m keypoints only those n ≪ m keypoints with
the highest response value will be extracted, as those
are most likely to be detected in another image of the
same scene. A threshold response value is often used,
∗
Supported by the Spanish Ministry of Education and
Science’s Juan de la Cierva contract JCI-2011-10400.
†
Supported by the European Commission’s Seventh
Framework Programme FP7/2007-2013 under grant agree-
ment 248497 (TRIDENT Project).
but in real time odometry it is more convenient to se-
lect a fixed number of keypoints with the highest re-
sponse, say 100 (Nannen and Oliver, 2012).
Underwater, satisfactory visibility often requires a
distance of no more than one or two meters from the
inspected surface. Objects fade with distance, which
makes the clarity of detail highly variable on irregular
surfaces. Even on flat surfaces we find that regions
which are rich in features often alternate with regions
that are virtually featureless. Feature rich objects like
crustaceans tend to concentrate the high response key-
points in small image regions. As a result, the set
of extracted keypoints might not overlap between im-
ages, or, if keypoints overlap and match, they might
come from too small a region to allow for a reliable
motion estimate with six degrees of freedom. A small
feature rich object like a crustacean might also have
its own independent trajectory.
An obvious remedy is to force the extracted key-
points to follow a more or less even spatial distribu-
tion over the image. In practice this means that se-
lection by response needs to be interwoven with se-
lection by spatial density. The literature provides a
number solutions that offer promising results. (Brown
et al., 2005) introduced adaptive non-maximal sup-
pression (ANMS) to achieve such an even distribu-
tion. This method calculates for each keypoint a sup-
pression radius, which is the distance to the closest
586
Nannen V. and Oliver G. (2013).
Grid-based Spatial Keypoint Selection for Real Time Visual Odometry.
In Proceedings of the 2nd International Conference on Pattern Recognition Applications and Methods, pages 586-589
DOI: 10.5220/0004270005860589
Copyright
c
SciTePress

keypoint with significantly higher response, and se-
lects the keypoints with the largest suppression ra-
dius for further processing. ANMS reports promis-
ing results but suffers from quadratic time complex-
ity in the number of considered keypoints. (Gauglitz
et al., 2011) suggest a number of heuristics to reduce
the time complexity of ANMS, and also offer an im-
proved version of ANMS, called suppression via disk
covering, which is of time complexity O(mlogm).
By contrast, (Cheng et al., 2007) achieve an even
spatial distribution by distributing keypoints over a
given number of c cells by means of a k-d tree. Start-
ing with a cell that covers the entire image and con-
tains all keypoints, the algorithm divides the cells re-
cursively into smaller cells, each containing half the
keypoints of the mother cell. For each division, the
spatial variance along the x and y-axis is computed,
and the cell is divided along the median value of the
dimension that has the larger variance. From the key-
points of each cell the n/c keypoints with the highest
response value are then selected for further process-
ing, again achieving a time complexity of O(mlogm).
(Cheng et al., 2007) recommend c = 64 cells if n =
100 keypoints are to be extracted.
Here we study and evaluate a selection method
that is even simpler than even k-d trees. We propose
to partition an image into a regular grid of c cells, to
assign all detected keypoints to their corresponding
cells, and to select from each cell the n/c keypoints
with the highest response value. As sorting by re-
sponse value cannot be avoided, the time complexity
is again O (mlogm), yet the constant factor is reduced
to a minimum. That is, compared with k-d trees, we
eliminate the need to calculate the variance in x and y-
dimension and the median for the winning dimension
for m keypoints for every division level. Calculation
of the median requires an extra sort at every division
level. K-d trees with 64 cells requires log
2
64 = 6 di-
vision levels and 7 sorts, while grid-based selection
requires only one sort.
Real world trials on underwater images show that
already a 2x2 grid can lead to dramatic improvement
over selection by response only. A 2x2 grid requires
only two greater-than comparison operations per key-
point, yet in our trials it extended the average vehicle
distance over which the visual odometer can correctly
estimate motion by an order of magnitude, from sev-
eral meters to several dozens of meters. The images
of these trials were recorded by remote vehicle off the
coast of the Balearic island of Mallorca and contain
thousands of images per sequence. The vehicle op-
erator tried to steer the vehicle at an average distance
of 1 meter from the sea floor. Due to the rocky na-
ture of the underwater terrain, with frequent boulders,
cliffs, and crevices, actual distance to image objects is
highly variable, as is the clarity of image features be-
tween images. It is important to note that in this case,
doubling the number of extracted keypoints per im-
age did not significantly increase the average length
of correct motion estimates.
Visual inspection of image pairs for which a 2x2
grid gave such a dramatic improvement shows that
they are typically of low quality—bad lighting and
much blur and fade—over most of the image, but
with a small image region of medium quality, such
that almost all extracted keypoints cover that small
region. This small region is then either not present
in both images of a pair, or has changed significantly
between images due to changes in lighting, blur or
fade. Response-based selection continues to be con-
centrated on this small region even when more key-
points are extracted, while grid-based selection forces
the low-quality region to be considered as well.
With this promising result at hand, the question
arises whether grid-based selection is also beneficial
or at least not detrimental when motion can already
be estimated well with response-based selection only.
If it is detrimental, a real-time system might require
additional logic to decide when to use grid-based se-
lection and when not. In the remainder of this article
we report on systematic experiments in a highly con-
trolled environment that evaluate the effect of grid-
based selection on motion estimates from image se-
quences of higher quality than in the real-world trials
described above.
2 EXPERIMENTAL SETUP
We base our evaluation on over 2,000 images that
were collected by a downward looking camera aboard
the Girona500 autonomous submarine (Prats et al.,
2012) during two controlled test dives in the labora-
tory pool of the VICOROB research group in Girona.
Image resolution is 384 by 288 pixels. Lighting con-
ditions were good and the water was clean. Motion
blur and light scatter are negligible. The floor of the
pool was covered by a life-size high resolution color
poster that shows a coral reef off the coast of Florida.
The poster was spread out flat, resulting in a planar
image scene. The digital version of the poster allows
us to calculate the ground truth per images with an ac-
curacy of 0.5 pixels. For a complete description of the
image acquisition and the calculation of the ground
truth see (Nannen and Oliver, 2012).
With a planar scene, motion can be estimated by
computing the homography that projects keypoints
from one image coordinate frame to the coordinate
Grid-basedSpatialKeypointSelectionforRealTimeVisualOdometry
587

frame of another image. A homography can be de-
composed into the rotation of the camera around its
axes, translation of the camera along the x and the y-
axis of the camera plane, and translation along its z
axis up to a scale parameter. See (Caballero et al.,
2009) for an overview of recent methodology. Roll
and pitch of the Girona500 did not exceed the ob-
served measurement error, and so we will consider
only yaw in the analysis.
For feature extraction and description we use
two independent open source implementations of the
SURF algorithm (Bay et al., 2008) without modifi-
cation: one by (Evans, 2009) and one included in the
OpenCV image processing library which is developed
and distributed by Willow Garage. For reference we
also report results on the SIFT algorithm, again as
included in the OpenCV library. For the computa-
tion of the homography we use RANSAC (?, Ran-
dom Sample Consensus,)]Fischler:1981 in combina-
tion with least squares.
The Girona500 moved at a constant altitude of
one meter over the poster. Its path consisted of 10
stretches of either 2 or 4 meters length, with 18 right
angle turns in between. During the straight runs,
the robot occasionally slowed down, rotated to adjust
its path, and continued. We considered pairs of im-
ages that are consecutive (distance 1) and that are of
distance {2, 3,. .. , 30}, totalling over 60,000 image
pairs. Average motion between images is 10 pixels,
mostly along the vertical axis, such that 2 consecutive
images overlap by 96%, and images at distance 10
still overlap by 2/3 of their area. Images at distance
30 only overlap if the robot slowed down or turned.
We consider 17 different grid arrangements, from
a grid size of 1, which is the 0-hypothesis, to a grid
size of 5× 8 = 40 cells. We consider 3 different num-
bers n of extracted keypoints per image: 50, 100, and
200. For each grid arrangement and for each value of
n we try to calculate a motion estimate for all 60,000
image pairs. When the number of grid cells is not a
multiple of the number of extracted image keypoints,
for example 30 grid cells and 100 extracted keypoints,
we first allocate a larger multiple of keypoints over
the grid cells, 120 in this example, so that every cell
has 4 keypoints. We then order all cells by the lowest
response value of the keypoints they contain, and re-
move the lowest keypoints from those cells that rank
lowest until the desired number of keypoints is ob-
tained. In this example, that would leave 10 cells with
4 keypoints, and 20 with 3 keypoints. Note that this
additional sort is over the number c of cells, not over
the much larger number m of keypoints.
When evaluating the quality of a motion estimate
we distinguish between the error in spatial translation,
Table 1: Definition of quality thresholds.
t.h. I
at least 6 inliers
t.h. II e
x,y
≤ 1.82 e
yaw
≤ .008 e
scale
≤ .021
t.h. III
e
x,y
≤ 0.75 e
yaw
≤ .004 e
scale
≤ .008
t.h. IV e
x,y
≤ 0.33 e
yaw
≤ .002 e
scale
≤ .003
the error in rotation about the z axis, and error in scale.
The translation error e
x,y
is the Euclidean distance in
pixels between the translation vector of the motion es-
timate that is based on the homography between two
images, and the translation vector according to the
ground truth. The rotation error e
yaw
is the absolute
difference in radians between yaw as measured from
the homographies between two images, and yaw ac-
cording to the ground truth. A homography allows
for the robot motion along the z axis of the camera to
be computed only up to scale. Since this scale varies
only slightly in this image set, always being close to
one, we will only consider an error in the estimation
of its real value. We define the scaling error e
scale
as
the absolute difference between the relative scale as
measured from the homography between two images
and the relative scale according to the ground truth.
To quantify the quality of a motion estimate we
count the number of image pairs that pass certain
quality thresholds. The lowest quality threshold,
threshold I, counts the number of image pairs with
at least six inliers as selected by RANSAC. Three
more thresholds count the number of image pairs
with translation, rotation and scaling errors that are
all lower than some respective predefined error levels
e
x,y
, e
yaw
, and e
scale
. See (Nannen and Oliver, 2012)
for a discussion of the problem of suitable thresholds,
and the choice presented in Table 1.
3 RESULTS
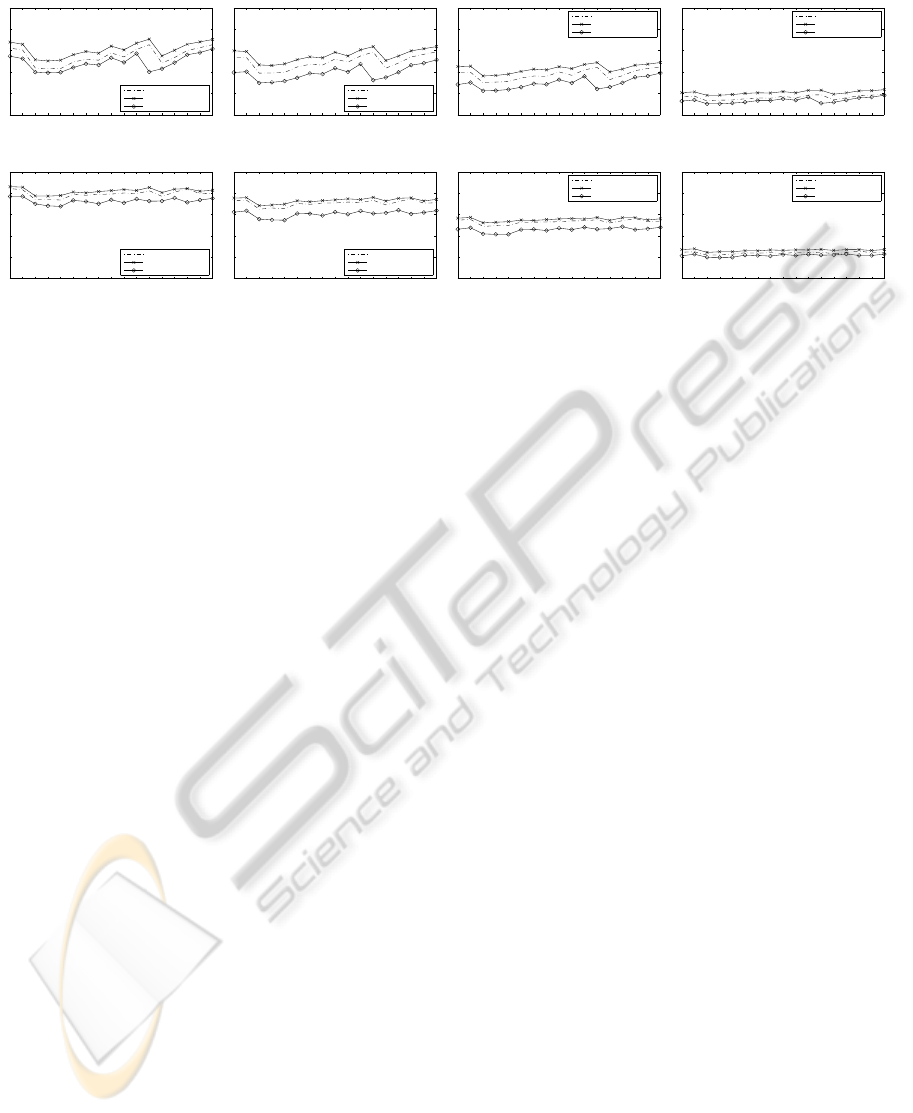
Figure 1 shows the results for 50 and 100 extracted
keypoints per image. Results for 200 extracted key-
points per image are very similar to those for 100 ex-
tracted keypoints, but lie 5 percent points higher on
the y-axis. The results are clear insofar as grid-based
spatial distribution never improves the estimate when
image quality is good, and significantly degrades it
for low numbers of extracted keypoints and low num-
bers of grid cells. The worst performance can be ob-
served for 50 keypoints, 4 or 6 cells, in which case
the number of image pairs for which the motion es-
timate the given thresholds decreases by about 25%.
With larger numbers of grid cells the performance ap-
proaches that of no grid-based spatial distribution, but
never exceeds it.
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
588
50 keypoints, threshold I
1x1 2x1 2x2 3x2 4x2 3x3 4x3 5x3 4x4 5x4 6x4 5x5 7x4 6x5 7x5 6x6 8x5
0
10
20
30
40
50
SURF C. Evans
SURF Willow Garage
SIFT Willow Garage
50 keypoints, threshold II
1x1 2x1 2x2 3x2 4x2 3x3 4x3 5x3 4x4 5x4 6x4 5x5 7x4 6x5 7x5 6x6 8x5
0
10
20
30
40
50
SURF C. Evans
SURF Willow Garage
SIFT Willow Garage
50 keypoints, threshold III
1x1 2x1 2x2 3x2 4x2 3x3 4x3 5x3 4x4 5x4 6x4 5x5 7x4 6x5 7x5 6x6 8x5
0
10
20
30
40
50
SURF C. Evans
SURF Willow Garage
SIFT Willow Garage
50 keypoints, threshold IV
1x1 2x1 2x2 3x2 4x2 3x3 4x3 5x3 4x4 5x4 6x4 5x5 7x4 6x5 7x5 6x6 8x5
0
10
20
30
40
50
SURF C. Evans
SURF Willow Garage
SIFT Willow Garage
100 keypoints, threshold I
1x1 2x1 2x2 3x2 4x2 3x3 4x3 5x3 4x4 5x4 6x4 5x5 7x4 6x5 7x5 6x6 8x5
0
10
20
30
40
50
SURF C. Evans
SURF Willow Garage
SIFT Willow Garage
100 keypoints, threshold II
1x1 2x1 2x2 3x2 4x2 3x3 4x3 5x3 4x4 5x4 6x4 5x5 7x4 6x5 7x5 6x6 8x5
0
10
20
30
40
50
SURF C. Evans
SURF Willow Garage
SIFT Willow Garage
100 keypoints, threshold III
1x1 2x1 2x2 3x2 4x2 3x3 4x3 5x3 4x4 5x4 6x4 5x5 7x4 6x5 7x5 6x6 8x5
0
10
20
30
40
50
SURF C. Evans
SURF Willow Garage
SIFT Willow Garage
100 keypoints, threshold IV
1x1 2x1 2x2 3x2 4x2 3x3 4x3 5x3 4x4 5x4 6x4 5x5 7x4 6x5 7x5 6x6 8x5
0
10
20
30
40
50
SURF C. Evans
SURF Willow Garage
SIFT Willow Garage
Figure 1: Percentage of motion estimates that pass a given quality threshold as a function of the number of cells. The x-axis
shows the number of cells with the understanding that a label like “5x4” stands for 5 cells on the image horizontal and 4 cells
on the image vertical, for a total of 20 cells. The y-axis shows the percentage of image pairs that pass the threshold. An x-axis.
We conclude that when a visual odometer cannot
estimate motion due to low image quality, grid-based
selection is a simple and lightweight solution. It pro-
vides a sufficient number of matching keypoints be-
tween images by forcing the selected keypoints of
each image to follow an even spatial distribution. In
real world trials the method extended the average
length of a correctly estimated path by an order of
magnitude. When images are of higher quality, a neg-
ative effect on the motion estimate must be noted, in
particular when the number of extracted keypoints is
very low, e.g., 50. This negative effect can be mini-
mized by using a large number of grid cells.
ACKNOWLEDGEMENTS
We thank the Computer Vision and Robotics (VI-
COROB) group in Girona for valuable support.
REFERENCES
Bay, H., Ess, A., Tuytelaars, T., and van Gool, L. (2008).
Speeded-Up Robust Features (SURF). Computer Vis.
Image Underst., 110(3):346–359.
Brown, M., Szeliski, R., and Winder, S. (2005). Multi-
image matching using multi-scale oriented patches.
In IEEE Conf. Comput. Vision Pattern Recogn.,
CVPR’05, pages 510–517. IEEE.
Caballero, F., Merino, L., Ferruz, J., and Ollero, A. (2009).
Vision-Based Odometry and SLAM for Medium and
High Altitude Flying UAVs. J. Intell. Robotic Syst.,
54(1-3):137–161.
Cheng, Z., Devarajan, D., and Radke, R. J. (2007). De-
termining Vision Graphs for Distributed Camera Net-
works Using Feature Digests. EURASIP J. Adv. Signal
Process., 2007(1):057034.
Evans, C. (2009). Notes on the OpenSURF Library. Tech-
nical Report CSTR-09-001, University of Bristol.
Fischler, M. A. and Bolles, R. C. (1981). Random sample
consensus: a paradigm for model fitting with appli-
cations to image analysis and automated cartography.
Comm. ACM, 24(6):381–395.
Gauglitz, S., Foschini, L., Turk, M., and Hollerer, T. (2011).
Efficiently selecting spatially distributed keypoints for
visual tracking. In IEEE Int. Conf. Image Process.,
ICIP’11, pages 1869–1872. IEEE.
Nannen, V. and Oliver, G. (2012). Optimal Number of
Image Keypoints for Real Time Visual Odometry.
In IFAC Worksh. Navig. Guid. Control Underw. Veh.
(NGCUV), pages 1–6, Porto.
Prats, M., Ribas, D., Palomeras, N., Garc´ıa, J. C., Nannen,
V., Wirth, S., Fern´andez, J. J., Beltr´an, J. P., Cam-
pos, R., Ridao, P., Sanz, P. J., Oliver, G., Carreras, M.,
Gracias, N., Mar´ın, R., and Ortiz, A. (2012). Recon-
figurable AUV for intervention missions: a case study
on underwater object recovery. Intel. Serv. Robot.,
5(1):19–31.
Grid-basedSpatialKeypointSelectionforRealTimeVisualOdometry
589
