
Human Motion Analysis under Actual Sports Game Situations
Sequential Multi-decay Motion History Image Matching
Dan Mikami
1
, Toshitaka Kimura
2
, Koji Kadota
3
, Harumi Kawamura
1
and Akira Kojima
1
1
Media Intelligence Laboratories, NTT, 1-1 Hikarino-oka, Yokosuka, Kanagawa, Japan
2
Communication Science Laboratories, NTT, 3-1 Morinosato-Wakamiya, Atsugi, Kanagawa, Japan
3
Graduate School of Medicine, Osaka University, 1-17, Machikaneyamacho, Toyonaka, Osaka, Japan
Keywords:
Motion Analysis, Motion History Image, MHI, Multiple Decay Parameter, Baseball.
Abstract:
This paper proposes a sequential multi-decay motion history image matching with the aim of analyzing human
motions captured in actual game situations without subjecting people to any intrusive measures. The motion
history image (MHI) is a well- known motion representation method, which can be used without foreground
detection. In MHIs, pixels on which motion is detected have large pixel values. As time elapses following the
latest motion detection, the values decrease according to a decay parameter. Two improvements were made to
enable MHI-based template matching to be applied to motion analysis; introducing a template MHI sequence
matching process that enables analysis of the temporal development of motions and extending MHIs to include
multiple decay parameters. Due to the MHI sequence, a reference motion includes target motions of various
speeds. Since the appropriate decay parameter varies with motion speed, no one predefined decay parameter
can be the best one. These improvements enable our method to effectively analyze human motions in actual
game situations. Experiments carried out indoors with capturing of 3D motion data and outdoors under real
games situations verified the effectiveness of the proposed method.
1 INTRODUCTION
Human motion analysis is one of the most im-
portant research areas in the field of computer vi-
sion. Its widespred applicability ranges from auto-
matic surveillance and human-computer interaction
to biomechanics and rehabilitation. Human motion
analyses for automatic surveillance and/or human-
computer interaction (Mikami et al., 2009) require
recognition of motion categories independent from
persons. In other words, a given human motion analy-
sis needs to absorb the person-dependent motion dif-
ferences and to recognize the motion category.
On the other hand, in cases when a human mo-
tion analysis aims at a quantification of motions for
biomechanical and/or rehabilitations purposes, slight
differences among multiple trials of the same mo-
tion become significant information (Vasconcelos and
Tavares, 2008).
The target of this paper is analysis of repetitive
human motion; the proposed method aims at analysis
and visualization of small differences among trials.
Conventionally, human motion analyses for sports
biomechanics have used motion capture systems. Al-
though these systems can effectively acquire 3D posi-
tion information of body parts, they have severe cap-
turing limitations. These limitations are as follows:
1. Equipping of markers
Though there are some marker-less motion cap-
ture systems, most commercially available sys-
tems require that target persons to be equipped
with markers to enable their movements to be ob-
served. In addition, to make the markers visible,
target persons are required to wear a body-fitting
cloth.
2. Illumination conditions
Motion capture systems are basically designed to
be used in laboratories and do not work in direct
sunlight.
3. Calibration of multiple cameras
Motion captures require multiple cameras that
need to be calibrated. For example, the well-
known commercial motion capture system ”Qual-
isys” requires at least three cameras for motion
capturing. In addition, once a camera is moved,
the calibration process needs to be carried out
again.
229
Mikami D., Kimura T., Kadota K., Kawamura H. and Kojima A..
Human Motion Analysis under Actual Sports Game Situations - Sequential Multi-decay Motion History Image Matching.
DOI: 10.5220/0004272202290236
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2013), pages 229-236
ISBN: 978-989-8565-48-8
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

Some previous studies have made use of depth
sensors such as ”Microsoft Kinect” for analyzing hu-
man motions (Oikonomidiset al., 2011; Shotton et al.,
2011). These sensors also have limitations, however,
on items such as sensor-target distance and illumina-
tion conditions. As a result, analyzing the motions of
athletes in actual game situations is a still challenging
problem.
We aim at developing a human motion analysis
method that is completely non-intrusive, i.e., requir-
ing neither special device nor body-fitting cloth, thus
making it suitable for use in actual game situations.
The motion history image (MHI) approach, which
was proposed by Bobick and Davis (Bobick and
Davis, 1996; Bobick and Davis, 2001), is acknowl-
edged as a motion analysis and representation method
that is robust against capturing environments. Each
pixel value of an MHI represents a temporal distance
from the latest motion detected at the pixel. Bright
pixels denote pixels in which motions are detected,
and with the elapse of time following the most recent
motions, the pixels become dark. As a result, the MHI
resembles an afterimage. The degree of to which pix-
els become dark is controlled by a decay parameter.
A lot of MHI-based motion representation and
detection studies have been carried out. For exam-
ple, gradient information is used for enhancing sen-
sitivity of both pose and directional motion informa-
tion (Bradski and Davis, 2002), motion history vol-
umes, which is an extension of the input from 2D
image to 3D volume data, was proposed as a free-
viewpoint motion representation (Valstar et al., 2004),
and multilevel intervals for MHI creation was pro-
posed to overcome self-occlusion problem (Weinland
et al., 2006). The most important advantage of the
MHI approach is its robustness under various captur-
ing environments. In addition, MHI-based motion de-
tection can be applied to an image sequence without
any calibrations.
In the context of motion detection in sports,
Mikami et al. used MHI for detecting pitching scenes
from baseball videos. In (Mikami et al., 2007), a ref-
erence pitching motion is represented by an MHI, and
then pitching motions in the target video are retrieved
by the reference motion. This method detects pitching
motions with high accuracy. However, it is not able to
analyze the temporal development of motions.
To the best of our knowledge, temporal develop-
ment of motion is not targeted by MHI-based mo-
tion analysis. This paper proposes a sequential multi-
decay MHI matching process that includes two im-
portant improvements over existing MHI template
matching approaches. First, the proposed method
newly introduces a temporal sequence of MHIs to rep-
resent a reference motion. By comparing a reference
MHI sequence with MHIs from the target video, it
simultaneously detects and analyzes the motion. Its
use of sequential reference MHIs enables to analyze
differences in temporal development among the mo-
tions.
Second, the method extends existing MHI to in-
clude multiple decay parameters. This compensates
for the innate problem of sequential matching. The
reference motion sequence includes both quick and
slow motions. A small decay parameter for quick mo-
tion yields an MHI with many bright pixels, which
deteriorates the spatial resolution of analysis. On the
other hand, a large decay parameter for slow motion
may yield an MHI with no or only a few motion his-
tory, which also deteriorates detection accuracy. Con-
sequently, no one predefined decay parameter can be
the best one. If the MHI-based method is to be ex-
tended to include sequential MHI matching, it must
be able to handle variations in motion speed.
In this paper, we use pitching motions in a base-
ball game as the target of analysis. Our method can be
more widely applied, however, to analyzing repetitive
motions such as tennis serves and golf swings.
The remainder of this paper is organized as fol-
lows. Section 2 reviews the MHI method. Section 3
proposes a temporal MHI sequence matching process.
Section 4 shows experimental results and Section 5
concludes the paper with a summary of key points.
2 MOTION HISTORY IMAGE:
MHI
The MHI approach, a method of motion represen-
tation proposed by Bobick and Davis (Bobick and
Davis, 1996; Bobick and Davis, 2001), has been
widely used because of its ease of implementation.
Many studies to enhance the method have been car-
ried out, as well as many studies using MHI as a
motion representation methods have been carried out.
Since these have been well described in the literature
(Ahad et al., 2012), we will introduce only the basic
idea and implementation of the MHI, here.
Figure 1 shows an MHI and snapshots of the cor-
responding image sequence shown from left to right
in time order. In the MHI, the value of each pixel
shows how recently a motion was detected on the
pixel. Bright (white) pixels denote pixels at which
motions are detected. With the elapse of time follow-
ing the most recent motion, the pixels turn dark.
The pixel value of MHI, H(x, y, t) at position (x, y)
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
230

(a) MHI (b) Corresponding image sequence
Figure 1: (a) The MHI. (b) Snapshots of the subject rais-
ing his leg. As shown in (a), a moving foreground can be
obtained without foreground detection.
Time
Similarity
Reference
Target video
Matching
Threshold
Detected motions
MHI creation
MHI sequence
t
t
Figure 2: Conventional MHI-based motion detection. At
each time step, an MHI is created from the original image
sequence. Target motions are detected on the basis of com-
parison with the reference and subsequent thresholding of
similarity.
and time t can be obtained by
H(x, y, t) =
(
255 D(x, y, t) = 1,
H(x, y, t − 1) − g otherwise,
(1)
where 255 (i.e., white) is a pixel value for pixels on
which a motion is detected, and D(x, y, t) denotes a
motion detection function. Inter-frame difference is
commonly used as the motion detection function. In
addition, g denotes a decay parameter; if small g is
used, the resulting MHI is affected by motions of long
past.
Template matching-based motion detection meth-
ods that use MHI for motion representation have been
proposed. Similarity criteria have also been proposed.
The simplest criterion in these methods is an inverse
of Euclidian distance as shown by
S(i, j) =
1
∑
x,y
H
i
(x, y) − H
j
(x, y)
. (2)
If the similarity is larger than a threshold, the tar-
get motions are detected (Fig. 2).
MHI-based motion detections, the decay parame-
ter g is predetermined on the basis of motion speed.
The most appropriate decay parameter varies with
motion speed. If a too small decay parameter is used
for fast movements, many motions are mixed together
and the precise detection of a target motion becomes
difficult. On the other hand, if too large decay param-
eter is used for slow movements, the ability of motion
expression becomes low. Therefore, accuracy of mo-
tion detection will be deteriorated.
3 PROPOSED METHOD:
SEQUENTIAL MULTI-DECAY
MOTION HISTORY IMAGE
MATCHING FOR MOTION
ANALYSIS
The proposed method detects and analyzes repetitive
human motions simultaneously by comparing them
with a reference motion. In our method, a reference
motion is represented by a sequence of MHIs.
To enable MHI-based template matching to be ap-
plied to motion analysis, the proposed method im-
proves the existing MHI-based template matching
procedure in two ways:
1. Expanding a template MHI to a temporal se-
quence of MHIs to represent a reference motion
(sequential MHI matching),
2. Expanding an MHI to a set of MHIs with multiple
decay parameters (multi-decay MHI matching).
The former enables analysis of the temporal devel-
opment of a motion. The latter is necessary to obtain
good matching between sequences. This is an impor-
tant improvement because a template, being a set of
temporal sequences by the former improvement, may
include both fast and slow movements. And, most ap-
propriate decay parameter varies on the basis of mo-
tion speed.
The proposed method consists of two steps; a tem-
plate registration step and a motion detection/analysis
step. At the motion registration step, the area and start
and end time of reference motion are manually set.
It generates the sequential multi-decay MHI. Then,
at the detection/analysis step, the most similar MHI
among the sequential multi-decay MHI, similarity be-
tween them, and a position where it was found were
obtained for each time step.
The improvements are described in the next two
subsections.
3.1 Sequential MHI Matching
The proposed method uses a sequence of MHIs to rep-
resent a reference motion. Hereafter, we refer to it as
the “reference MHI sequence.” Figure 3, a template
ID is applied to each image in the reference MHI se-
quence; the ID corresponds to the amount of time (in
frames) from the beginning of the template motion.
HumanMotionAnalysisunderActualSportsGameSituations-SequentialMulti-decayMotionHistoryImageMatching
231

1 2 3 4 5 6 7 8 9 10
21 22 23 24 25 26 27 28 29 30
Figure 3: Example sequence of MHIs; a template ID is assigned to each MHI. To be exact, each MHI is extended to multi-
decay MHI as described in Section 3.2.
Reference
Target video
Matching
MHI creation
MHI sequence
t
t
t
Reference
Target video
Detected motions
t
v
t
r
Simirality
Threshold
t
Figure 4: Proposed MHI-based motion detection. At each
time step, an MHI is created from the original image se-
quence. Target motions are detected on the basis of com-
parison with the reference and subsequent thresholding of
similarity.
The proposed method uses the reference MHI se-
quence R
R
R = {R(1), ··· , R(L)} to retrieve the motion
from the MHI sequence created from a target video,
where L is the number of images within the reference.
At each time step, it obtains the template ID of the
most similar of the MHIs in the reference MHI se-
quence. At the same time, the similarity of the MHI
with the retrieved most similar template MHI and the
position where it is retrieved are also obtained. The
graph at the top of balloon in Fig.4 denotes the tem-
poral transition of the retrieved template ID. The dot
in the graph demonstrates that the MHI whose tem-
plate ID = t
r
is the closest to the MHI at time t
v
. The
graph at the bottom shows the transition of the simi-
larity between them.
A lot of sequence matching methods have been
proposed; dynamic time warping (DTW) and Hid-
den Markov Model are the most famous examples
and they can be applied to our method. However, to
simply verify the effectiveness of using the reference
MHI sequence, the proposed method first detects the
most similar of the MHIs in the reference MHI se-
quence. Then, on the basis of the temporal transition
of the template ID, it simultaneously detects and ana-
lyzes the target motion.
Our sequential MHI matching approach can be
written as follows:
e
k(t) = argmin
k∈{1,···,L}
S(H(k), R(k)), (3)
m(t) =
L
∑
i=1
|i−
e
k(t + i)|. (4)
If m(t) is lower than a threshold, the proposed method
detects it as a targeted motion.
3.2 Multi-decay MHI
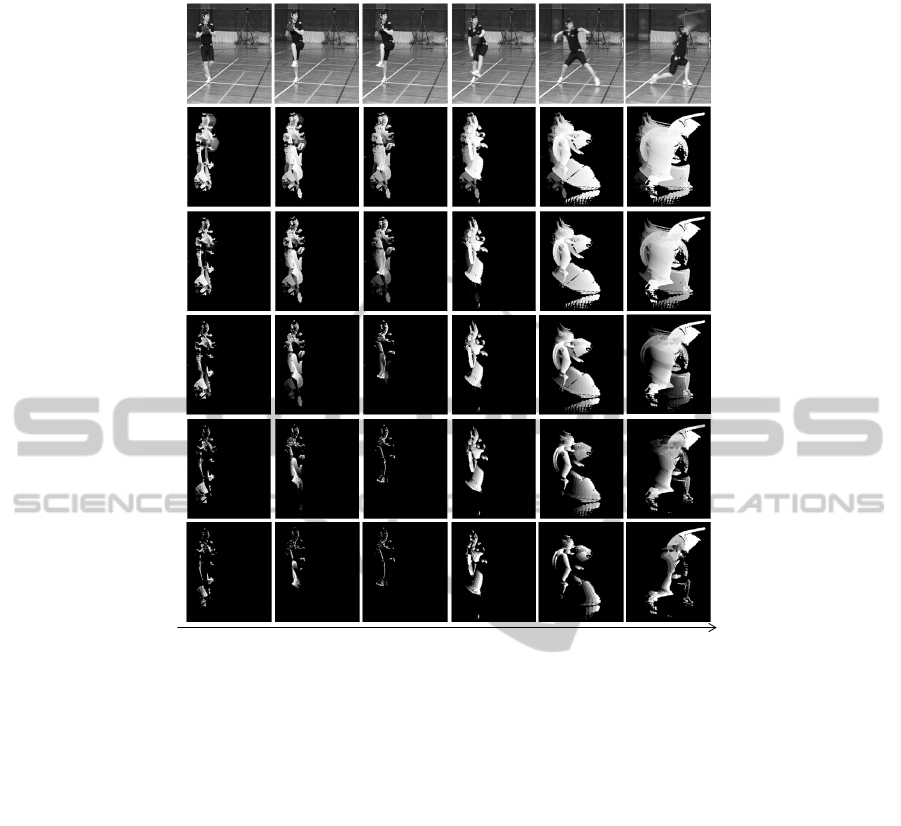
Figure 5 shows MHIs of the decay parameters 4, 8,
16, 32, and 64 for the same motion. The motion is
that of a pitcher pitching as seen from a side view; the
pitcher raises his left leg, steps forward, and throws
the ball. In Fig. 5, the horizontal axis is time. The
top row shows the original images and the lower rows
show MHIs with decay parameters in increasing or-
der.
A small decay parameter for a quick target’s
movement yields an MHI that includes too much past
motion information; template matching using such an
MHI deteriorates spatial resolution of motion detec-
tion. In contrast, a large decay parameter for a slow
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
232
Time [frame]
t t+10 t+20 t+30 t+40 t+50
4
8
16
32
64
Figure 5: MHIs of different decay parameters. The lines show MHIs with the decay parameters 4, 8, 16, 32, and 64, respec-
tively. The left row shows the view immediately after the pitching motion started.
movement yields an MHI that includes no or only a
few motion information; such an MHI cannot provide
a good motion template.
3.2.1 Definition of Multi-decay MHI
As can be observed in Fig. 5, appropriate decay
parameters are affected by motion speed. However,
since the matching method has been expanded to MHI
sequence matching as described in Sect. 3.1, the ref-
erence motion includes both quick and slow move-
ments. Therefore, no decay parameter is unable to
yield good MHIs for the sequence. To overcome this
problem, we expand the MHI to a new multi-decay
MHI, which is actually a set of MHIs with multiple
decay parameters.
The new multi-decay MHI, M(t), at time t is de-
fined as
M(t) = {H
(1)
(t), ··· , H
(g)
(t), ··· , H
(G)
(t)}, (5)
where H
(g)
(t) denotes MHI at time t with decay pa-
rameter g. It can be re-written as follows.
M(x, y, t) = {H
(1)
(x, y, t), ··· , H
(g)
(x, y, t),
··· , H
(G)
(x, y, t)}, (6)
where M(x, y, t) denotes a set of pixel values at (x, y),
which is a G dimensional vector. Here,
H
(g)
(x, y, t) =
(
255 D(x, y, t) = 1,
H(x, y, t − 1) − g otherwise,
(7)
the same as in previous MHI.
3.2.2 Similarity between Multi-decay MHIs
The similarity between multi-decay MHIs
Φ(M(i), M( j)), i.e., the similarity between M(i)
and M( j), is defined as follows.
Φ(M(i), M( j)) = S(H
(bg)
(i), H
(bg)
( j)) (8)
bg = argmin
g
|var(H
(g)
(i)) −V|,(9)
where var(H
(g)
(i)) denotes a variance of pixel val-
ues within H
(g)
(i). This means that the decay level
HumanMotionAnalysisunderActualSportsGameSituations-SequentialMulti-decayMotionHistoryImageMatching
233

Thrower
Catcher
Cameras for Qualisys
Cameras for image-based methods
Figure 6: Experimental setup. Seven cameras were used for
Qualisys (motion capture system). Two cameras were used
for capturing videos.
bg is selected from the variance of H
(g)
(i), and then
the MHIs with decay level bg are used for similarity
calculation. Note that, decay level bg employed for
comparison target is also bg. Here, Φ(M(i), M( j)) is a
pseudo-distance, so Φ(M(i), M( j)) 6= Φ(M( j), M(i)).
However, it is not a problem for retrieving similar
movements. The variable V is a parameter to deter-
mine appropriate variance, which is determined as 50
experimentally.
4 EXPERIMENTAL
To verify the effectiveness of our method, we con-
ducted experiments by using two types of videos of
pitchers throwing a baseball. Those of the first type
were in a gym and the motion capture system “Qual-
isys” was used for taking measurements. With this
system we captured 3D positions for 28 of pitcher’s
joints. Two cameras were used simultaneously to take
the videos; the settings are shown in Fig. 6. A total of
121 pitching trials were captured using two subjects.
Those of the second type were taken during ac-
tual baseball games; pitching motions made during
the game were detected and analyzed.
The sequential template MHIs were set manually.
4.1 Motion Analysis with Proposed
Method
4.1.1 Effect of Sequential Matching
Figure 7 shows an example output of our proposed
method and Fig. 8 shows the vertical position ob-
tained from 3D motion camera data for corresponding
trials.
In Fig. 7, the reference motion is shown in the top
left window and the detected motion is shown in the
Template ID
Horizontal
position
Vertical
position
Template Motion Trial #25
Figure 7: Results obtained with proposed method. The top
left window shows the video of the template motion; the
top right window shows a video of a detected trial. Both
motions are synchronized. The bottom row shows tempo-
ral transitions of the detected template ID (left) and those
of positions where the templates are detected (middle and
right).
top right one. For purpose of visibility, normal videos
are shown, although MHIs are used for detection and
analysis. The detected template ID and the transitions
of detected positions are depicted at the bottom.
As can be seen from the red circled area in Fig.
7, templates with IDs larger than that of the refer-
ence motion are detected at the same timings at the
detected motions. This means that the detected mo-
tion starts faster than the template motion. After that,
both motions are synchronized well.
This was also observed from motion capture data
(Fig. 8). Checking the movements of the left
toe showed that the detected movement (green line)
started faster than the reference movement (red line).
Good synchronization of both movements was also
observed. In contrast, no differences were observed
for the right hand and the right toe.
As described here, our proposed method compre-
hensively obtains movements and visualizes differ-
ences between motions. This intuitive output is one
of the method’s most attractive advantages. Motion
capture data makes it possible to obtain precise three-
dimensional data of body joints. Although it makes
detailed analysis possible, there is a possibility that
important information may be hidden within such vo-
luminous data.
4.1.2 Effect of Multi-decay MHI
To verify the effectiveness of introducing multi-decay
MHI, we compared the proposed method to sequen-
tial MHI matching with fixed decay parameters. The
results are shown in Fig. 9, which shows temporal
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
234

Left toe
Right toe
Right hand
Figure 8: The 3D position data obtained via motion cap-
ture. The target motion is the same as that in Fig. 7. The
graphs show the elevation occurring within the 3D data of
the joints.
transition of the detected ID and positions where it is
observed. As shown in Fig. 9, when the fixed decay
parameter 64 was used, the matching was failed from
frame 1105 to frame 1110. On the other hand, cases
that the decay parameter was 16 and the multi-decay
parameter, the correct matching were done.
Figure 10 shows the MHI at frame 1107 and the
MHIs of frame 25 and 85 from the beginning of the
template sequence; frame 25 of template MHI se-
quence was selected as the most similar one for frame
1107. The MHIs with decay parameter 64 included
quite few motion information. As a result of low mo-
tion representation ability, the matching failed. On
the contrary, the MHIs with decay parameter 16 in-
clude rather much motion information, which led the
correct matching of motions.
4.2 Other Examples
Figure 11 shows another example of motion detec-
tion and analysis by our method. On the basis of the
transitions of matched template ID, detected motion,
which is denoted by green, started faster than refer-
ence, which is denoted by yellow. This can be well
observed from the snapshot.
During the pitching motion, horizontal position of
detected motion became large as shown at the bottom
graph. Though the difference is quite small and is
difficult to be recognized, our method well visualized
such small difference.
0
10
20
30
40
50
60
70
80
1030 1040 1050 1060 1070 1080 1090 1100 1110 1120
template ID
time [frame]
Fix (g=8)
Fix (g=64)
Proposed
(a) ID
0
5
10
15
20
25
30
35
1030 1040 1050 1060 1070 1080 1090 1100 1110 1120
horizontal position [pixel]
time [frame]
Fix (g=8)
Fix (g=64)
Proposed
(b) Horizontal position
0
10
20
30
40
50
1030 1040 1050 1060 1070 1080 1090 1100 1110 1120
vertical position [pixel]
time [frame]
Fix (g=8)
Fix (g=64)
Proposed
(c) Vertical position
Figure 9: Temporal transition of ID that is the most similar
and positions where it is found.
5 CONCLUSIONS
This paper described a sequential multi-decay motion
history image (MHI) matching method we have de-
veloped and here propose with the aim of analyzing
human motions made in game situations without sub-
jecting subjects to any intrusive measures. Two im-
provements were made to enable MHI-based template
matching to be applied to motion analysis. The first is
introducing a template MHI sequence matching pro-
cess and the second is extending MHIs to include
multiple parameters. These improvements enable our
method to effectively analyze human motions in ac-
tual game situations.
Future work will include developing an analysis
method to improve the association between results
and body parts. At present our method handles move-
ments comprehensively; however, more detailed anal-
ysis should is required to improve its performance.
HumanMotionAnalysisunderActualSportsGameSituations-SequentialMulti-decayMotionHistoryImageMatching
235

(a) MHI at frame 1107
(d) MHI at frame 1107
(b) 25th MHI in
template
Decay
param.
= 64
Decay
param.
= 16
(c) 85th MHI in
template
(e) 25th MHI in
template
(f) 85th MHI in
template
Figure 10: Comparison of created MHI at frame 1107 and
multi-decay MHIs in the template.
Template ID
Horizontal position
Figure 11: Another example of motion detection and anal-
ysis.
REFERENCES
Ahad, M. A. R., Tan, J. K., Kim, H., and Ishikawa, S.
(2012). Motion history image: its variants and appli-
cations. Machine Vision and Applications, 23(2):255
– 281.
Bobick, A. F. and Davis, J. W. (1996). Real-time recog-
nition of activity using temporal templates. In Proc.
of 3rd IEEE workshop on Applications of Computer
Vision (WACV), pages 39 – 42.
Bobick, A. F. and Davis, J. W. (2001). The recognition
of human movement using temporal templates. IEEE
Trans. PAMI, 23(3):257 – 267.
Bradski, G. R. and Davis, J. W. (2002). Motion segmenta-
tion and pose recognition with motion history gradi-
ents. Machine Vision and Applications, 13(3):174 –
184.
Mikami, D., Konya, S., and Morimoto, M. (2007). Pitch by
pitch event detection using impulse sound detection
and moving image clustering. IEICE Trans. Informa-
tion and Systems, J90-D(2):526–534.
Mikami, D., Otsuka, K., and Yamato, J. (2009). Memory-
based particle filter for face pose tracking robust under
complex dynamics. In Proc. of IEEE Computer Vision
and Pattern Recognition (CVPR), pages 999 – 1006.
Oikonomidis, I., Kyriazis, N., and Argyros, A. A. (2011).
Efficient model-based 3D tracking of hand articula-
tions using Kinect. In Proc. of BMVC.
Shotton, J., Fitzgibbon, A., Cook, M., Sharp, T., Finocchio,
M., Moore, R., Kipman, A., and Blake, A. (2011).
Real-time human pose recognition in parts from a sin-
gle depth image. In Proc. of IEEE Computer Vision
and Pattern Recognition (CVPR).
Valstar, M., Pantic, M., and Patras, I. (2004). Motion history
for facial action detection in video. In Proc. of IEEE
Int’l conf. on System, Man and Cybernetics, volume 1,
pages 635–640.
Vasconcelos, M. J. M. and Tavares, J. M. R. (2008). Human
motion analysis: Methodologies and applications. In
Proc. of Int’l Symposium on Computer Methods in
Biomechanics and Biomedical Engineering.
Weinland, D., Ronfard, R., and Boyer, E. (2006). Free
view point action recognition using motion history
volumes. Computer Vsion and Image Understanding,
104(2–3):249–257.
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
236
