
GPU-accelerated Real-time Markerless Human Motion Capture
Christian Rau and Guido Brunnett
Computer Graphics Group, Chemnitz University of Technology, Strasse der Nationen 62, Chemnitz, Germany
Keywords:
Motion Capturing, Shape-from-Silhouette, Voxelization, Pose Estimation, GPGPU.
Abstract:
We present a system for capturing human motions based on video data from multiple cameras. It realizes a 3-
dimensional voxel-based reconstruction of the human together with an estimation of the pose of his complete
body in each frame. The use of an underlying kinematic skeleton together with an idealized geometric model
can guarantee a valid pose even in the face of occlusions caused by the incomplete spatial information gained
from the cameras. The data-parallel nature of the used algorithms makes them well-suited for the implementa-
tion on modern graphics hardware. In this way the motion can be captured in real-time on a single PC despite
the computation of a reconstruction accurate enough for a high quality pose estimation.
1 INTRODUCTION
Most systems for accurately measuring human mo-
tion require the human to wear special markers or
sensors, which may restrict his movement and can be
time-consuming to attach. Furthermore, the complex
technology of those systems makes them quite expen-
sive. For these reasons there has been much research
on approaches to markerless motion capturing, trying
to recreate the motion based solely on the image data
from one or more cameras without requiring the hu-
man to wear special equipment. But the problem of
extracting a 3-dimensional motion from a set of 2-
dimensional videos is a complex task often preventing
the methods from performing in real-time.
But recently the programmability of graphics pro-
cessors has reached a flexibility which enables them
to be used for various tasks beyond just the genera-
tion of images, often outperforming CPUs by orders
of magnitude for highly data-parallel computations,
like those arising in markerless human motion captur-
ing techniques. In this work we want to present such
a system doing markerless motion capture on modern
graphics hardware in real-time.
2 RELATED WORK
The markerless capturing of human motions has
been studied extensively, a thorough overview can
be gained from (Moeslund et al., 2006). The usual
approach is to first extract the relevant information
(the human) from the cameras’ images by doing a so-
called background subtraction (Toyama et al., 1999).
In the next step a 3-dimensional representation of
the human needs to be computed from this informa-
tion. Whereas there exist approaches for the extrac-
tion of surface-based polyhedral reconstructions (Ma-
tusik et al., 2001), the usual approach is the approxi-
mation by voxelization (Cheung et al., 2000)(Caillette
and Howard, 2004)(Kehl and Gool, 2006)(Corazza
et al., 2010). From this reconstruction the pose of
the human can be estimated. This is often done us-
ing an underlying kinematic model of the human mo-
tion system (Luck et al., 2001)(Caillette and Howard,
2004)(Kehl and Gool, 2006)(Corazza et al., 2010).
Estimation can be based on various clues, be it im-
age space information (Kehl and Gool, 2006), cluster
analysis (Cheung et al., 2000)(Caillette and Howard,
2004), or anatomical knowledge about the human
body (Luck et al., 2001).
In (Caillette and Howard, 2004) a hierarchical
voxel grid is used to accelerate the capturing and
achieve real-time performance, but a hierarchical grid
can introduce a severe discretization error based on
the coarseness of the base grid. The highly data-
parallel nature of graphics hardware has already been
used in (Hasenfratz et al., 2003) for accelerating the
voxel reconstruction of a human actor from images,
but hardware was not as flexible at that time, requir-
ing the mapping of computational problems into the
restricted domain of graphics processing.
397
Rau C. and Brunnett G..
GPU-accelerated Real-time Markerless Human Motion Capture.
DOI: 10.5220/0004282203970401
In Proceedings of the International Conference on Computer Graphics Theory and Applications and International Conference on Information
Visualization Theory and Applications (GRAPP-2013), pages 397-401
ISBN: 978-989-8565-46-4
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

3 3D SHAPE RECONSTRUCTION
In a first step the relevant information, in this case the
captured human, has to be extracted from the individ-
ual camera images by background subtraction. This
results in a binary silhouette image with each pixel
marked as either belonging to the human or to the
irrelevant background. In this work we employ the
technique presented in (Cheung et al., 2000).
Once the silhouette images for the current frame
have been computed successfully, they are used to re-
construct a 3-dimensional representation of the hu-
man. This is achieved by the theoretical concept of
the visual hull, the largest volume whose projection
into the cameras’ image planes exactly matches the
corresponding silhouettes.
Due to the fact that this visual hull can have an
arbitrary shape, it is usually only approximated by
discretizing the 3-dimensional space into a finite grid
of voxels and finding the subset of voxels that best
represents the actual visual hull. This is achieved by
projecting each voxel into the image planes of the in-
dividual cameras and classifying it as part of the vi-
sual hull if its projection intersects the corresponding
silhouette image. For checking this intersection the
projected voxel area is sampled at a small number of
pixels and the whole region is classified based sim-
ply on the ratio of silhouette sample pixels to non-
silhouette sample pixels, as in (Cheung et al., 2000).
We further simplify the computation of the projected
voxel region by representing a voxel with a disk par-
allel to the image plane, resulting in an easy to sample
circular shape, instead of the hexagonal projection re-
sulting from a cubic voxel.
Since we ultimately want to match the recon-
structed object to a surface model of the human body
(see 4), the further removal of any internal vox-
els, identified by having all of their respective 6-
connected neighbors belonging to the foreground, is
an obvious optimization step to reduce the complex-
ity of the following steps.
4 POSE ESTIMATION
Based on the 3-dimensional reconstruction of the hu-
man his current pose is to be estimated, as represented
by the joint angles of a kinematic skeleton. The use of
an underlying kinematic skeleton as an abstraction of
the human motion system guarantees a valid pose in-
side the constraints of the human body in each frame.
Unfortunately the visual hull does not carry any
topological or semantic information, it need not even
be connected due to errors in the background subtrac-
tion or the voxel reconstruction. The usual approach
is therefore to match the visual hull to an idealized
geometric model of the human body (Cheung et al.,
2000)(Caillette and Howard, 2004)(Kehl and Gool,
2006)(Corazza et al., 2010). Due to the human body
mainly consisting of tubular parts, the simplest geo-
metric model to represent its shape is a set of ellip-
soids (Cheung et al., 2000)(Luck et al., 2001)(Cail-
lette and Howard, 2004), assigning each skeleton seg-
ment to a corresponding ellipsoid that describes the
geometry of the surrounding body part.
So in a first step the ellipsoid model has to real-
ize the current pose of the reconstructed human by
adapting it to his current voxel reconstruction. For
this classic cluster analysis problem an Expectation-
Maximization algorithm is a viable approach (Cheung
et al., 2000)(Caillette and Howard, 2004):
1. Each voxel is assigned to the ellipsoid with the
shortest distance to it, resulting in the classifica-
tion of the voxels into body parts (fig. 1 (a)).
2. The ellipsoids’ parameters are recomputed using
a principal component analysis of the assigned
voxels, resulting in the ellipsoids adapting to the
voxel hull’s pose (fig. 1 (b)).
Once the pose of the geometry and the locations
of the individual body parts are known, the corre-
sponding kinematic pose can be extracted therefrom.
The joint angles are therefore computed using inverse
kinematics, with the ellipsoids’ center points defining
the goals of their corresponding skeleton segments’
centers (fig. 1 (c)). The iterative nature of the numeric
IK methods profits from the previous frame’s skeleton
pose already being a good intial value for the estima-
tion of the current frame’s pose. Occlusions or errors
in the background subtraction may result in ellipsoids
not fitted correctly, which should not be used to drive
the IK. Therefore, whenever the number of assigned
voxels of an ellipsoid does not reach half the aver-
age number of assigned voxels over the whole motion,
this ellipsoid does not define a goal for its correspond-
ing segment, similar to the measure used in (Caillette
and Howard, 2004).
In practice doing a complete IK over the whole
skeleton turns out to be not very robust due to the high
maneuverability of the root joint. Therefore, the po-
sition and orientation of the root is precomputed ex-
plicitly based on a few assumptions:
• The line connecting both hip joints always lies in
a horizontal plane.
• The horizontal orientation of the root is equal to
the horizontal orientation of the upper torso.
• The height of the root above the ground does not
change significantly over the whole motion.
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
398
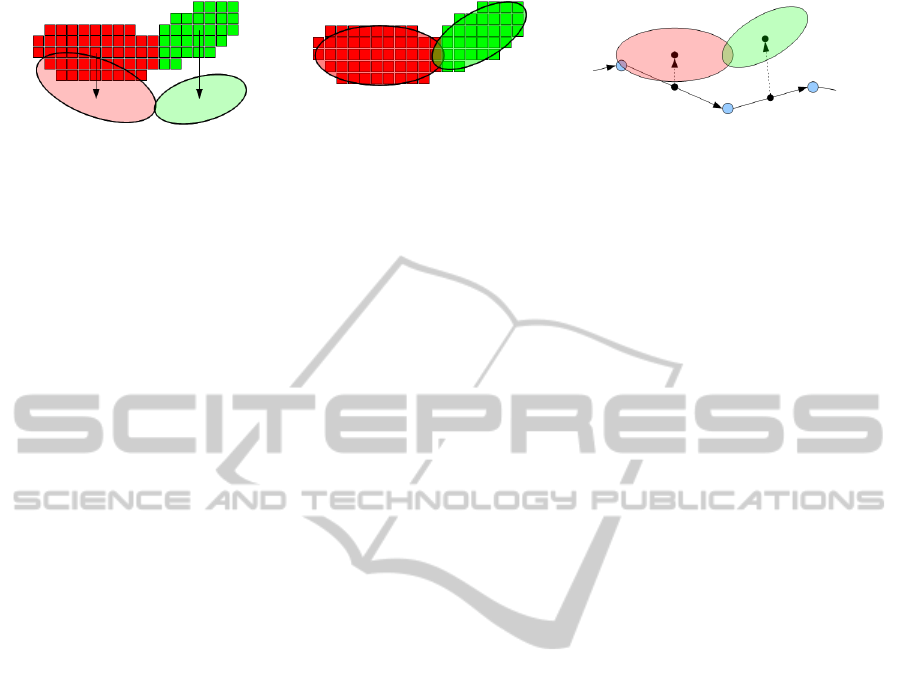
(a) expectation
→
(b) maximization
→
(c)
Figure 1: Ellipsoid fitting and IK-based pose estimation: (a) Assign voxels to closest ellipsoids. (b) Recompute ellipsoid
parameters based on assigned voxels. (c) Ellipsoid centers as IK targets for corresponding segments.
Based on those assumptions the root orientation
can be derived from the line connecting the shoulder
joints as a measure for the horizontal orientation of
the upper torso and from the up-axis of the torso found
by a principal component analysis of all the torso’s
voxels. Since we don’t know the shoulder joints’ po-
sitions yet, the values from the previous frame are
used, based on the frame-to-frame coherence. The
position of the root joint can be derived from the di-
rection of the upper legs, given by the corresponding
ellipsoids, intersected with a horizontal plane at the
hips’ height.
During the whole pose estimation process we
make heavy use of the frame-to-frame coherence by
requiring the ellipsoid model’s and skeleton’s pose to
match the human’s pose of the previous frame. Of
course this does not hold for the first frame. There-
fore, the skeleton pose and ellipsoid parameters for
the first pose have to be determined manually at the
beginning. This can be simplified by requiring the
human to take a certain reference pose. But in addi-
tion to a proper initialization we also need to correct
the ellipsoid model each frame by readapting it to the
computed kinematic pose. Otherwise the ellipsoids
would tend to degenerate over the course of the mo-
tion, especially in the presence of incorrectly assigned
ellipsoids.
5 GPU IMPLEMENTATION
The high data-parallel nature of the used algorithms
makes them well suited for being implemented on
modern many-core architectures, in particular mod-
ern programmable graphics accelerators (GPUs). In
this way they can be accelerated up to real-time per-
formance even for very detailed voxel grids.
The background subtraction transforming the
camera images into the binary silhouette images is
a standard image processing task done independently
for each pixel and requiring no synchronization be-
tween individual pixels, which makes it well suited
for being implemented on the GPU. One might think
about incorporating the background subtraction di-
rectly into the voxel’s foreground test and thus per-
forming it for each sample pixel of each voxel instead
of each image pixel. But in practice this approach
performs less efficiently, especially for larger voxel
grids where the number of sample pixels is much
larger than the number of image pixels, which makes
the increased complexity of the voxel foreground test
hide any possible gain from the omission of the back-
ground subtraction step.
The voxels’ foreground test can also be invoked
independently for each individual voxel. In this case
we assign one thread to each voxel of the grid. This
utilizes the GPU’s resources sufficiently and since this
thread performs a silhouette test for each individual
sample pixel and each camera, its computational com-
plexity is still high enough to hide memory latencies.
The silhouette test of the sample pixels in turn profits
from the GPU’s texturing hardware optimized for 2-
dimensional memory access. After the internal voxels
have been marked as background in a following step,
we finally have the boolean foreground flags of each
individual voxel of the whole grid. In order for the
next steps to concentrate on the relevant data only, the
voxel grid needs to be compacted into a list of only
the foreground voxels. This is a standard stream com-
paction problem often arising as part of data-parallel
algorithms and can be solved efficiently by a parallel
prefix sum to compute the foreground voxels’ list in-
dices (Sengupta et al., 2008), followed by a scattering
step realizing the actual compaction. Since the po-
sition of a voxel is uniquely encoded in its position
inside the grid and the grid resolution of each dimen-
sion does not need to be larger than 256 in practice,
each foreground voxel can be compactly represented
with a single 32-bit value, leaving one byte for addi-
tional state.
The expectation step of the ellipsoid fitting can
again be parallelized easily without the need for syn-
chronization by assigning a single thread to each indi-
vidual foreground voxel. Since this thread computes
the distance of the voxel to each ellipsoid, it again has
a high computational complexity compared to a small
number of memory accesses, requiring only a single
load and store from/to global off-chip memory that
GPU-acceleratedReal-timeMarkerlessHumanMotionCapture
399

(a) reconstruction
→
(b) expectation
→
(c) maximization
→
(d) pose estimation
Figure 2: Workflow of the motion capturing process for a single frame.
can be coalesced between multiple threads for maxi-
mum memory throughput. The ID of the nearest el-
lipsoid can thereby be stored compactly in the vacant
byte of the 32-bit voxel state.
In order for the ellipsoids’ means and covari-
ance matrices needed for the maximization step to
be accumulated efficiently, we first sort the voxels
based on the IDs of their nearest ellipsoids. This can
be achieved efficiently using a parallel bucket sort
(Satish et al., 2009), since the number of ellipsoids
is very small (15 in our case). The actual accumu-
lation of the means and covariances can then be im-
plemented as a segmented reduction as a modification
of the segmented prefix sum, computing the data for
each ellipsoid (segment). The only problem with this
approach is the quite large amount of shared on-chip
memory required by the individual means and covari-
ance matrices of the voxels, which slightly reduces
the number of resident threads and therefore the uti-
lization of the GPU’s resources.
Since the complexity of the final IK-based pose
estimation does not depend on the number of voxels
but only on the very small number of kinematic joints,
it would not profit from a GPU implementation and
is therefore still done on the CPU. But since it only
needs information about the ellipsoids computed in
the previous steps, it is not necessary to retrieve the
voxel data from the GPU. And since the voxel data
is computed anew each frame based on the silhouette
images, the only large data that needs to be copied
between CPU and GPU each frame are the cameras’
images. But in practice these are usually needed on
the GPU for visualizing them, anyway.
6 RESULTS
The workflow of the system for a single frame is
depicted in fig. 2. To evaluate the presented mo-
tion capturing system we tested it in an artificial sce-
nario, generated by capturing the animation of a vir-
Table 1: Performance of the CPU and GPU based imple-
mentations for different voxel grid resolutions.
grid 32
3
64
3
128
3
256
3
CPU FPS 25 12 4 1
GPU FPS 124 121 106 49
tual human from 4 different viewpoints and emulating
a standard camera setup with an image resolution of
640×480 pixels at 30 Hz per camera. The advantage
of using artificial input data is that we know the exact
motion from which it was generated and can, there-
fore, objectively evaluate the quality of the captured
motion. The used motion in this case is a 25 second
dancing motion which exhibits a large range of dif-
ferent sub-motions. For measuring the error of the
capturing, we can simply take the distance between
the joint positions in the captured pose and the refer-
ence pose for each joint in each frame. This error can
further be averaged over all joints and over all frames
to gain an overall measure of the capturing quality,
lieing between 3 and 4 cm for the tested scenario.
For evaluating the influence of the voxel grid res-
olution on the capturing quality fig. 3 shows the aver-
age joint errors for different voxel grids plotted over
the course of the whole motion. It can be seen that an
increase of the voxel grid resolution results both in a
smaller overall error, as well as a much smoother er-
ror curve, eliminating high-frequency errors and thus
resulting in a smoother motion. This is a natural con-
sequence of the reconstruction quality’s direct depen-
dence on the voxelization’s discretization error.
The performance is shown in tab. 1 for both a
CPU-based solution tested on an Intel Core i7 with
3.4 GHz and the proposed GPU-based solution tested
on an NVIDIA GeForce GTX 580 (implemented with
OpenCL). It can be seen that the GPU implementation
realizes motion capturing in real-time up to a maxi-
mum voxel grid resolution of 256
3
voxels.
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
400

Figure 3: Average joint errors in meters over the whole motion for different voxel grid resolutions.
7 CONCLUSIONS AND FUTURE
WORK
As we have seen the markerless capture of human mo-
tions is well suited for implementation on GPUs. This
allows the capturing to be realized in real-time while
providing a highly accurate voxel reconstruction, nec-
cessary for a smooth and accurate motion capture.
But there is still much room for improvement of
the presented system. First of all, we haven’t tested it
yet with real input data, which requires additional re-
search for the background subtraction method. This
was a trivial problem for the tested artificial sce-
nario, but in reality one has to cope with illumina-
tion changes through shadows and similar problems.
Furthermore, the initialization of the model for the
initial pose has to be done manually, leaving room
for automatization of this process. Last but not least
the pose estimation makes some slightly restricting
assumptions about the captured motion and still has
problems with very fast motions.
REFERENCES
Caillette, F. and Howard, T. (2004). Real-time markerless
human body tracking with multi-view 3-d voxel re-
construction. In Proceedings of BMVC, pages 597–
606.
Cheung, K.-M., Kanade, T., Bouguet, J.-Y., and Holler, M.
(2000). A real time system for robust 3d voxel re-
construction of human motions. In Proceedings of the
2000 IEEE Conference on Computer Vision and Pat-
tern Recognition (CVPR ’00), pages 714–720.
Corazza, S., M
¨
undermann, L., Gambaretto, E., Ferrigno,
G., and Andriacchi, T. P. (2010). Markerless motion
capture through visual hull, articulated icp and subject
specific model generation. International Journal of
Computer Vision, 87(1):156–169.
Hasenfratz, J.-M., Lapierre, M., Gascuel, J.-D., and Boyer,
E. (2003). Real-time capture, reconstruction and in-
sertion into virtual world of human actors. In Vision,
Video and Graphics, pages 49–56. Elsevier.
Kehl, R. and Gool, L. V. (2006). Markerless tracking of
complex human motions from multiple views. Com-
puter Vision and Image Understanding, 104(2):190–
209.
Luck, J., Small, D., and Little, C. (2001). Real-time track-
ing of articulated human models using a 3d shape-
from-silhouette method. In Robot Vision, Lecture
Notes in Computer Science, pages 19–26. Springer
Verlag.
Matusik, W., Buehler, C., and McMillan, L. (2001). Polyhe-
dral visual hulls for real-time rendering. In Proceed-
ings of the 12th Eurographics Workshop on Rendering
Techniques, pages 115–126. Springer Verlag.
Moeslund, T. B., Hilton, A., and Kr
¨
uger, V. (2006). A sur-
vey of advances in vision-based human motion cap-
ture and analysis. Computer Vision and Image Under-
standing, 104(2):90–126.
Satish, N., Harris, M., and Garland, M. (2009). Design-
ing efficient sorting algorithms for manycore gpus. In
Proceedings of the 2009 IEEE International Sympo-
sium on Parallel and Distributed Processing, pages
1–10. IEEE Computer Society.
Sengupta, S., Harris, M., and Garland, M. (2008). Efficient
parallel scan algorithms for gpus. Technical report,
NVIDIA.
Toyama, K., Krumm, J., Brummit, B., and Meyers, B.
(1999). Wallflower: Principles and practice of back-
ground maintenance. In Proceedings of the Seventh
IEEE International Conference on Computer Vision,
pages 255–261.
GPU-acceleratedReal-timeMarkerlessHumanMotionCapture
401
