External Cameras and a Mobile Robot for Enhanced Multi-person
Tracking
A. A. Mekonnen
1,2
, F. Lerasle
1,2
and A. Herbulot
1,2
1
CNRS, LAAS, 7 avenue du Colonel Roche, F-31400 Toulouse, France
2
Univ de Toulouse, UPS, LAAS, F-31400 Toulouse, France
Keywords:
Multi-target Tracking, Multi-sensor Fusion, Automated Human Detection, Cooperative Perception Systems.
Abstract:
In this paper, we present a cooperative multi-person tracking system between external fixed-view wall mounted
cameras and a mobile robot. The proposed system fuses visual detections from the external cameras and laser
based detections from a mobile robot, in a centralized manner, employing a “tracking-by-detection” approach
within a Particle Filtering scheme. The enhanced multi-person tracker’s ability to track targets in the surveilled
area distinctively is demonstrated through quantitative experiments.
1 INTRODUCTION
Automated multi-person detection and tracking are
indispensable in video-surveillance, robotic and sim-
ilar systems. Unfortunately, automated multi-person
perception is very challenging due to variations in hu-
man appearance. These challenges are further am-
plified in robotic platforms due to mobility, limited
Field-Of-View (FOV) of on-board sensors, and lim-
ited on-board computational resources. Relatively
successful multi-person perception systems have been
reported in classical video-surveillance frameworks
that rely on visual sensors fixed in the environ-
ment (Hu et al., 2004). Even though these systems
benefit from global perception from wall-mounted
cameras, they are still susceptible to occlusions and
dead-spots. To circumvent these shortcomings, we
propose a cooperativemulti-personperception system
consisting of a mobile robot and two wall-mounted
fixed-view cameras. This system benefits from the
global perception of the wall-mounted cameras and
additionally, from the mobile platform which pro-
vides local perception, a means for action, and as it
can move around, the ability to cover dead spots and
possibly alleviate occlusions resulting in enhanced
perception capabilities. Similar systems have been
proposed in (Chia et al., 2009) and (Chakravarty
and Jarvis, 2009). Contrary to both works, our pro-
posal fuses cooperative information in a centralized
manner. The proposed system has the ability to
complement local perception with global perception
and vice-versa, enhancing each individual approach
through cooperation. To the best of our knowledge
this cooperative framework has not been addressed in
the literature.
Touchscreen
ELO
RF
Antennas
2D SICK
Laser
Firewire Camera
on PTU
Laptop
Camera 1
Flea RGB
Camera 2
Flea RGB
Hub
Firewire
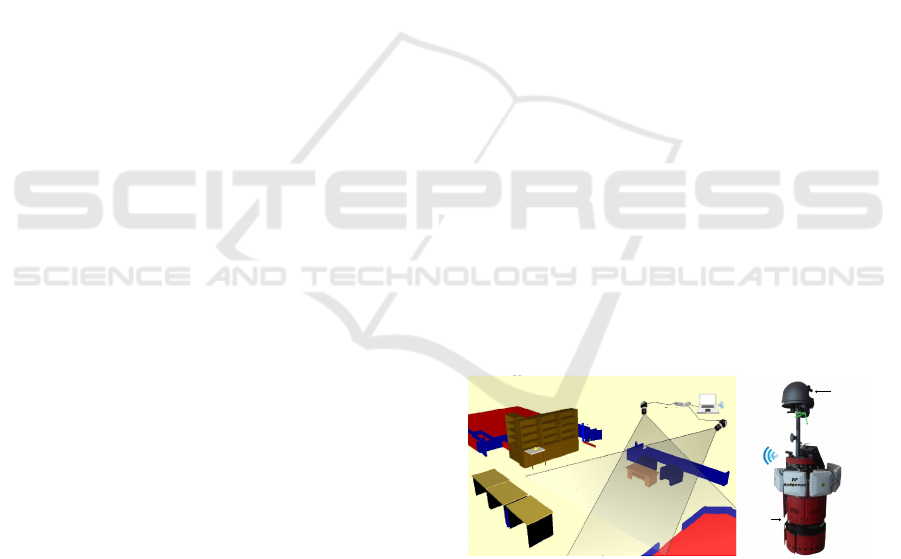
Figure 1: Perceptual platform; static cameras (with rough
positions and fields of view) and Rackham.
This paper is structured as follows: architecture of
the cooperative system is presented in section 2. Sec-
tion 3 describes the different detection modalities that
drivethe multi-person tracker (presented in section 4).
Evaluations and results are presented in section 5 fol-
lowed by concluding remarks in section 6.
2 ARCHITECTURE
Our cooperative framework is made up of a mobile
robot and two fixed view wall-mounted RGB flea2
cameras (figure 1). The cameras havea maximum res-
olution of 640x480pixels and are connected to a dual-
core Intel Centrino Laptop via a fire-wire cable. The
robot, called Rackham, is an iRobot B21r mobile plat-
form. It has various sensors, of which its SICK Laser
411
Mekonnen A., Lerasle F. and Herbulot A..
External Cameras and a Mobile Robot for Enhanced Multi-person Tracking.
DOI: 10.5220/0004294904110415
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2013), pages 411-415
ISBN: 978-989-8565-48-8
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
Range Finder (LRF) is utilized in this work. Commu-
nication between the mobile robot and the computer
hosting the cameras is accomplished through a wi-fi
connection.
Leg Detection
Foreground Segmentation
(Detection)
HOG based Person
Detection
Multi-Person Tracking
2D SICK Laser
(on robot)
Flea2 RGB
cameras (wall mounted)
TRACKING
DETECTION
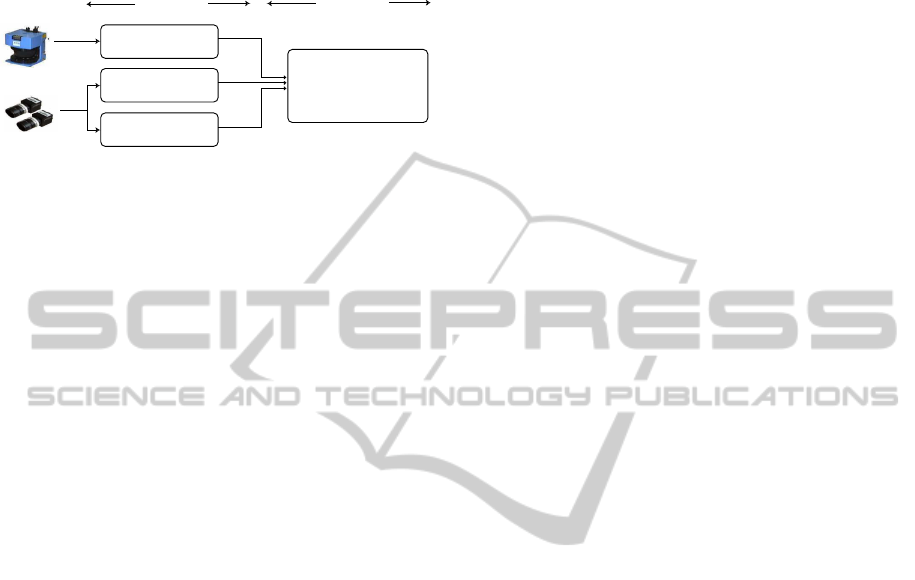
Figure 2: Multi-person detection and tracking system block
diagram.
Figure 2 shows block diagram of the envisaged
multi-person perceptual system. It has two main
parts. The first part deals with automated multi-
person detection. The second part is dedicated for
multi-person tracking. It takes all detections as in-
put and fuses them in a Particle Filtering framework.
Each of these parts are discussed in detail in subse-
quent sections. It is worth mentioning here that the
entire system is calibrated with respect to a global ref-
erence frame. Both the intrinsic and extrinsic param-
eters of the fixed cameras are known and in addition
the mobile robot has localization module that local-
izes its pose with respect to the reference frame using
laser scan segments.
3 MULTI-PERSON DETECTION
The perceptual functionalities of the entire system are
based on various detections. The detection modules
are responsible for automatically detecting persons in
the area. Differentperson detection modalities are uti-
lized depending on the data provided by each sensor.
Leg Detection with LRF: the LRF provides hori-
zontal depth scans with a 180
o
FOV and 0.5
o
reso-
lution at a height of 38cm above the ground. Person
detection, hence, follows by segmenting leg patterns
within the scan. In our implementation a set of ge-
ometric properties characteristic to human legs and
outlined in (Xavier et al., 2005) are used.
Person Detection from Wall Mounted Cameras:
to detect persons using the wall mounted cameras,
two different modes are used. First, a foreground
segmentation using a simple Σ-∆ background subtrac-
tion technique (Manzanera, 2007) is used. The mo-
bile robot is masked out of the foreground images us-
ing its position from its localization module. Second,
Histogram of Oriented Gradients (HOG) based per-
son detection (Dalal and Triggs, 2005) is used. This
method makes no assumption of any sort about the
scene or the state of the camera (mobile or static). It
detects persons in each frame using HOG features.
Both detections are projected to yield ground posi-
tions, (x, y)
G
with associated color appearance infor-
mation in the form of HSV histograms (P´erez et al.,
2002), of individuals in the area.
4 MULTI-PERSON TRACKING
Multi-person tracking in our context, is concerned
with the problem of tracking a variable number of
persons, possibly interacting, in the ground plane.
The literature in multi-target tracking contains differ-
ent approaches but when it comes to tracking mul-
tiple interacting targets of varying number (Khan
et al., 2005) has clearly shown that Reversible
Jump Markov Chain Monte Carlo - Particle Filters
(RJMCMC-PFs) are more appealing taking perfor-
mance and computational requirements into consid-
eration. Inspired by this, we have used RJMCMC-
PF, adapted to our cooperativeperceptual strategy, for
multi-person tracking driven by the various heteroge-
neous detectors. The actual detectors are: the LRF
based person detector, the foreground segmentation
(detection) and HOG based detections from each wall
mounted camera. Implementations choices crucial to
any RJMCMC-PF are briefly discussed below.
State Space: the state vector of a person i in hy-
pothesis n at time t is a vector encapsulating the id
and (x, y) position of an individual on the ground
plane with respect to a defined coordinate base, x
n
t,i
=
{Id
i
, x
n
t,i
, y
n
t,i
}.
Proposal Moves: RJMCMC-PF accounts for the
variability of the tracked targets by defining a variable
dimension state space. Proposal movespropose a spe-
cific move on each iteration to guide this variable state
space exploration. In our implementation, four sets of
proposal moves, m = {
Add
,
Update
,
Remove
,
Swap
},
are used. The choice of the proposals privileged in
each iteration is determined by q
m
, the jump move
distribution. These values are determined empir-
ically and are set to {0.15, 0.8, 0.02, 0.03} respec-
tively. Equation 1 shows computation of the accep-
tance ratio, β, of a proposal X
∗
at the n
th
iteration.
It makes use of the jump move distribution, q
m
; pro-
posal move distribution, Q
m
(), associated with each
move; the observation likelihood, π(X
n
t
); and the in-
teraction model, Ψ(X
n
t
).
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
412

β = min
1,
π(X
∗
)Q
m∗
X
n−1
t
|X
∗
q
m∗
Ψ(X
∗
)
π
X
n−1
t
Q
m
X
∗
|X
n−1
t
q
m
Ψ
X
n−1
t
(1)
where m ∈ {
Add
,
Update
,
Remove
,
Swap
} and m
∗
de-
notes the reverse operation.
Update
and
Swap
moves
are self reversible.
Add
: the add move, randomly selects a detected per-
son, x
p
, from the pool of provided detections and ap-
pends its state vector on X
n−1
t
resulting in a proposal
state X
∗
. The proposal density driving the
Add
pro-
posal, Q
Add
X
∗
|X
n−1
t
, is then computed according
to equation 2.
Q
Add
X
∗
|X
n−1
t
=
∑
d
k
d
.
N
d
∑
j=1
N
x
p
;z
d
t, j
, Σ
.
1− k
m
N
t
∑
j=1
N
x
p
;
ˆ
X
t−1, j
, Σ
!
(2)
where d represents the set of detectors, namely: from
laser (l), fixed camera 1 (c
1
), and fixed camera 2 (c
2
);
d ∈ {l, c
1
, c
2
}, N
d
the total number of detections in
each detector, k
d
is a weighting term for each detector
such that
∑
d
k
d
= 1, N
t
is the number of targets in the
MAP, and k
m
is a normalizationconstant. When a new
person is added, its appearance is cross-checked with
the appearance of persons that have been tracked for
re-identification.
Remove
: this move randomly selects a tracked person
x
p
from the particle being considered, X
n−1
t
, and re-
moves it, proposing a news state X
∗
. Contrary to the
add move, the proposal density used when comput-
ing the acceptance ratio, Q
Remove
(X
∗
|X
n−1
t
) (equation
3), is given by the distribution map from the tracked
persons masked by a map derived from the detected
passers-by.
Q
Remove
X
∗
|X
n−1
t
=
1−
∑
d
k
d
.
N
d
∑
j=1
N
x
p
;z
d
t, j
, Σ
!
.
k
m
N
t
∑
j=1
N
x
p
;
ˆ
X
t−1, j
, Σ
!
(3)
Update
: here, the state vector of a randomly cho-
sen passer-by is perturbed by a zero mean nor-
mal distribution. The update proposal density,
Q
update
(X
∗
|X
n−1
t
), is a normal distribution with the
position of the newly updated target as mean.
Swap
: the swap move handles the possibility of id
switches amongst near or interacting targets. When
this move is selected, the ids of the two nearest
tracked persons are swapped and a new hypothesis X
∗
is proposed. The acceptance ratio is computed similar
to the
Update
move.
Interaction model (Ψ(.)): is used to maintain
tracked person identity and penalize fitting of two
trackers on the same object during interaction. A
Markov Random Field (MRF), similar to (Khan et al.,
2005), is adopted to address this.
Observation Likelihood (π(.)): the observation
likelihood, in equation 1, is derived from all detec-
tor outputs except the laser for which blobs formed
from the raw laser range data, denoted as l
b
, are con-
sidered. If the specific proposal move is an
Update
or
Swap
move, a Bhattacharyya likelihood measure is
also incorporated. Each detection is represented as
a Gaussian, N (.), centered on the detection. Rep-
resenting the measurement information at time t as
z
t
, the observation likelihood of the n
th
particle X
n
t
at
time t is computed as shown in equation 4.
π(X
n
t
) = π
B
(X
n
t
).π
D
(X
n
t
)
π
B
(X
n
t
) =
∏
M
i=1
∏
2
c=1
e
−λB
2
i,c
, if m =
Update
or
Swap
1 , otherwise
π
D
(X
n
t
) =
1
M
M
∑
i=1
∑
d
k
d
.π
x
i
|z
d
t
!
,
∑
d
k
d
= 1
π
x
i
|z
d
t
=
1
N
d
N
d
∑
j=1
N
x
i
;z
d
t, j
, Σ
(4)
Above, B
i
represents the Bhattacharyya distance
computed between the appearance histogram of a pro-
posed target i in particle X
n
t
and the target model in
each camera c. M represents the number of targets
in the particle, and N
d
the total number of detections
in each detection modality d, d = {l
b
, c
1
, c
2
}, in this
case including the measures from the laser blobs. k
d
is a weight assigned to each detection modality tak-
ing their respective accuracy into consideration and x
i
represents the position of target i in the ground plane.
5 EVALUATIONS AND RESULTS
To evaluate the performance of our RJMCMC-PF
multi-person tracker, three sequences acquired using
Rackham and the wall mounted cameras are used.
Each sequence contains a laser scan and video stream
from both cameras. Sequence I and II contain 200
frames each and consist of two and three targets con-
secutively. Sequence III is 186 frames long contain-
ing four targets moving in the vicinity of the robot.
The evaluation is carried out using the CLEAR MOT
metrics (Bernardin and Stiefelhagen, 2008), Multi-
ple Object Tracking Accuracy (MOTA) and Precision
(MOTP). To clearly observe the advantages of each
ExternalCamerasandaMobileRobotforEnhancedMulti-personTracking
413

Table 1: Multi-person tracking evaluation results.
Sequence
Laser-only Fixed Cameras only Cooperative
MOTP MOTA MOTP MOTA MOTP MOTA
µ σ µ σ µ σ µ σ
I 15.62 2.34 0.41 0.05 19.80 0.14 0.79 0.03 17.01 1.87 0.84 0.03
II 19.90 1.66 0.27 0.07 22.79 1.35 0.70 0.05 17.73 0.50 0.79 0.03
III 21.94 1.75 0.20 0.07 28.44 1.60 0.46 0.07 21.30 1.34 0.54 0.04
sensor modality, the evaluation is carried out by do-
ing the tracking using (1) laser-only information, (2)
vision-only data from the two wall mounted cameras,
and finally (3) laser and the two cameras coopera-
tively. A hand labeled ground truth with (x, y) ground
positions and unique id for each person is used in the
evaluation. Each sequence is run eight times to ac-
count for the stochastic nature of the filter. Results
are reported as mean value and associated standard
deviation in table 1.
The results presented in table 1 clearly attest the
improvements in perception brought by the cooper-
ative fusion of laser and wall mounted camera per-
cept. The cooperative system consisting of laser and
two wall mounted cameras exhibit an MOTA of 0.841
when tracking two targets, 0.793 for three targets.
These results clearly indicate the enhanced perfor-
mance of this system. Sample tracking sequences
from sequence II are shown in figure 3
1
. Evidently,
the LRF-only has low accuracy owing to the mistakes
made with leg like structures in the environment, sen-
sitivity to occlusion, and lack of discriminating infor-
mation amongst tracked passers-by. The results ob-
tained using the wall mounted cameras show major
improvements though their position tracking preci-
sion is relatively lower compared to those which in-
clude laser measurement. The final tracker runs at
1f ps. Most of the computation time, ≈ 700ms, is
spent on HOG based person detection.
6 CONCLUSIONS
The work presented herewith makes its main contri-
bution in the vein of multi-person tracking by propos-
ing a cooperative scheme between overhead cam-
eras and sensors embedded on a mobile robot in or-
der to track people in crowds. Our Bayesian data
fusion framework with the given sensor configura-
tion enhances typical surveillance systems with only
fixed cameras and complete embedded systems with-
1
For complete run, visit the URL homepages.laas.fr/
aamekonn/videos/
(a) (b)
Figure 3: Multi-person tracking illustrations taken from se-
quence II at a) frame 60, and b) frame 94.The top row im-
ages show camera streams and the bottom shows the ground
floor with tracked persons’ trajectories superimposed
1
.
out wide FOV and straightforward (re)-initialization
ability. The presented results are a clear indication of
the framework’s notable tracking performance.
REFERENCES
Bernardin, K. and Stiefelhagen, R. (2008). Evaluating mul-
tiple object tracking performance: the CLEAR MOT
metrics. EURASIP Journal on Image and Video Pro-
cessing, 2008:1:1–1:10.
Chakravarty, P. and Jarvis, R. (2009). External cameras
and a mobile robot: A collaborative surveillance sys-
tem. In Australasian Conf. on Robotics and Automa-
tion (ACRA’09), Sydney, Australia.
Chia, C., Chan, W., and Chien, S. (2009). Cooperative
surveillance system with fixed camera object localiza-
tion and mobile robot target tracking. In Advances
in Image and Video Technology, volume 5414, pages
886–897. Springer Berlin / Heidelberg.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In Int. Conf. on Com-
puter Vision and Pattern Recognition (CVPR’05), San
Diego, CA, USA.
Hu, W., Tan, T., Wang, L., and Maybank, S. (2004). A
survey on visual surveillance of object motion and be-
haviors. IEEE Trans. Syst., Man, Cybern., Syst., Part
C: Applications and Reviews, 34(3):334 –352.
Khan, Z., Balch, T., and Dellaert, T. (2005). Mcmc-based
particle filtering for tracking a variable number of in-
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
414

teracting targets. IEEE Trans. Pattern Anal. Mach. In-
tell., 27(11):1805–1918.
Manzanera, A. (2007). Sigma - delta background subtrac-
tion and the zipf law. In Iberoamericann Congress on
Pattern Recognition (CIARP’07), Valparaiso, Chile.
P´erez, P., Hue, C., Vermaak, J., and Gangnet, M. (2002).
Color-based probabilistic tracking. In Europ. Conf. on
Computer Vision (ECCV’02), Copenhagen, Denmark.
Xavier, J., Pacheco, M., Castro, D., and Ruano, A. (April,
2005). Fast line, arc/circle and leg detection from laser
scan data in a player driver. In Int. Conf. on Robotics
and Automation (ICRA’05), Barcelona, Spain.
ExternalCamerasandaMobileRobotforEnhancedMulti-personTracking
415
