
Using Whole and Part-based HOG Filters in Succession to Detect Cars
in Aerial Images
Satish Madhogaria
1
, Marek Schikora
1,2
and Wolfgang Koch
1
1
Dept. Sensor Data and Information Fusion, Fraunhofer FKIE, Wachtberg, Germany
2
Department of Computer Science, Technical University of Munich, Munich, Germany
Keywords:
Car Detection, Image Analysis, HOG, SVM, LSVM, Part Models, Aerial Images.
Abstract:
Vehicle detection in aerial images plays a key role in surveillance, transportation control and traffic monitoring.
It forms an important aspect in the deployment of autonomous Unmanned Aerial System (UAS) in rescue
and surveillance missions. In this paper, we propose a two-stage algorithm for efficient detection of cars in
aerial images. We discuss how sophisticated detection technique may not give the best result when applied to
large scale images with complicated backgrounds. We use a relaxed version of HOG (Histogram of Oriented
Gradients) and SVM (Support Vector Machine) to extract hypothesis windows in the first stage. The second
stage is based on discriminatively trained part-based models. We create a richer model to be used for detection
from the hypothesis windows by detecting and locating parts in the root object. Using a two-stage detection
procedure not only improves the accuracy of the overall detection but also helps us take complete advantage
of the accuracy of sophisticated algorithms ruling out it’s incompetence in real scenarios. We analyze the
results obtained from Google Earth dataset and also the images taken from a camera mounted beneath a flying
aircraft. With our approach we could achieve a recall rate of 90% with a precision of 94%.
1 INTRODUCTION
In this paper we address the task of solving object de-
tection in large-scale aerial images. When we talk
about large-scale aerial images, car detection could
be termed as one of the most challenging task as car
appear very small in large images and vary greatly
in shapes and sizes. Besides, the appearance of the
object within the observed scene changes quite often
depending on the flight altitude and camera orienta-
tion. Given the complexity of the problem and the
scope for improving the accuracy of detection makes
it an important topic of research. This work is inspired
from the fact that although the problem of aerial car
detection is attempted number of times, still, there is
much scope for improving the accuracy and efficiency
of the task. Various approaches have been proposed
for vehicle detection in aerial images like that of neu-
ral network-based hierarchical model for detection in
(Ruskone et al., 1996), use of gradient features to cre-
ate a generic model and Bayesian network for classifi-
cation as shown in (Zhao and Nevatia, 2001), feature
extraction comprising of geometric and radiometric
features and detection using top-down matching ap-
proach shown in (Hinz, 2003; Nguyen et al., 2007).
(Han et al., 2006) proposed a two-stage method to
detect people and vehicles by using HOG+SVM as
the final verfication stage. HOG-based features (Dalal
and Triggs, 2005) have consistently outperformed in
various object detection tasks, however, it has its lim-
itation when it comes to small objects like that of
cars in aerial images because many details of the cars
are not always visible. There are attempts to com-
bine hog features with several other feature extraction
technique for performance improvement. The most
recent work is the one shown in (Kembhavi et al.,
2011), where the authors combine HOG with Color
probability Maps and Pairs of pixels to form a high-
dimensional feature set and shows good result. Com-
parisons of results can easily prove that the perfor-
mance of the proposed method improves.
The main aim of this work is to build an effec-
tive system which can distinguish cars from the back-
ground in aerial images with high accuracy. We pro-
pose a two-stage method for detecting vehicles in
large-scale aerial images. We show that using the
standard HOG filters (Dalal and Triggs, 2005) in two
steps, one for the root object detection and another
for parts detection (Felzenszwalb et al., 2008), in se-
ries can greatly improve the detection accuracy. First,
681
Madhogaria S., Schikora M. and Koch W..
Using Whole and Part-based HOG Filters in Succession to Detect Cars in Aerial Images.
DOI: 10.5220/0004297406810686
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2013), pages 681-686
ISBN: 978-989-8565-47-1
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

Figure 1: Proposed vehicle detection method.
we apply the HOG filter to extract hypothesis win-
dows followed by part-based filters on each of the hy-
pothesis windows to detect parts at twice the resolu-
tion of original image. Although part-based models
have high accuracy rate, it is often avoided in big im-
ages because of efficiency issues. In addition, when
such sophisticated models are applied to large-scale
images with multiple small objects, we show that it
misses out objects (see Figure 3). However, when se-
lected windows are given as an input to the part-based
model, it can give an impressive performance. In our
approach, the second stage is strongly constrained by
specific knowledge and the first stage is more general
and less constrained.
We test our method using two different data sets.
First, we create a library of training and test images
from Google Earth. Our second set of testing images
consists of high resolution camera images taken from
a camera mounted on an aircraft. With our approach,
we could achieve a detection rate of more than 90%
with a precision of 94%. We also show that our ap-
proach achieves higher accuracy when compared to
each step applied individually to the test images.
In the next section (2), we describe the methods
adapted for use in vehicle detection task and follow it
up with the performance analysis and results (Section
3) and conclusion (Section 4)
2 SYSTEM OVERVIEW
Figure 1 shows how the two steps work in series.
The overall system is based on HOG filters. In the
first stage, a relaxed version of HOG+SVM method is
used to generate hypothesis windows. We make sev-
eral deviations from the standard HOG+SVM (Dalal
and Triggs, 2005) in order to have negligible or a very
low miss rate. The hypothesis windows are generated
at multiple orientations. These subwindows and the
cartesian coordinates in image space serves as an in-
put to the second stage. The second stage is highly
constrained by using part-based filters to verify the
presence of object parts in the hypothesis windows.
The part-based filters are applied at double the reso-
lution at which single HOG filters are applied. The
part filters give an overall score to each of the hypoth-
esis window and a decision whether it contains a car
is made by thresholding the score. Finally, the non-
maximal suppression method is used to remove the
overlapping windows.
2.1 Relaxed HOG+SVM Detection
To create a less constrained model, we use the ”his-
togram of orientation gradient” feature descriptors
(Dalal and Triggs, 2005) to extract features that can
resemble a car. Since the time HOG features are intro-
duced to detect people, there has been constant mod-
ifications to the standard HOG in order to improve
the detection of people as well as other objects in im-
ages (Wang and Zhang, 2008; Monzo et al., 2011;
Meng et al., 2012). In this work, as we are interested
in using HOG features and a Linear SVM classifier
(Cortes and Vapnik, 1995; Chang and Lin, 2001) to
extract hypothesis windows. HOG features count the
occurrences of gradient orientations within overlap-
ping rectangular blocks in the search window. HOG
filters are rectangular templates defining weights for
features. Let x be an image subwindow and Θ(x) de-
note its extracted feature. x is labeled as a ”hypothesis
window”, if
f (x) > 0, f (x) = w · Θ(x) (1)
where w is the filter. Here, w is obtained from the
linear SVM training of positive and negative training
samples.
To Achieve High Detection Rate in First Stage:
1. In the detection step, we keep the window strides
low so as to have as many detection as possible
around the same object. This in turn increases the
probability of detection of the object in the second
stage.
2. The threshold, defined by the distance between
the feature and SVM classifying plane, is kept
lower than usual to improve the detection rate. We
conduct several initial experiments with different
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
682

(a) (b) (c) (d)
Figure 2: (a) shows the HOG filter. (b) Shows higher resolu-
tion part filters and (c) shows the deformation model which
defines the cost of placing part filters inside the root filter.
(d) shows the parts located in a hypothesis windows.
threshold values and choose the one which can de-
tect nearly all the cars. Despite the fact that it re-
sults in high number of false detection, the overall
performance of the detector is least affected be-
cause of the highly accurate second stage of our
algorithm.
3. We do not suppress the overlapping windows in
the first stage since the detection rate improves
slightly when the second classifier is given mul-
tiple windows around the same object.
Besides, the window size also plays an important role
in improving the performance of the detector. We
chose 48x96 size window to represent the object. Ex-
periments show that having a size smaller than 48x96
reduces the detection. To detect objects at multiple
scales, the given input image is upscaled or down-
scaled depending on the altitude.
Rotation-invariance Detection in the First Stage.
As the first stage is relatively faster because of parallel
implementation, during the first stage, we detect cars
at all possible orientations. Since the HOG fe.atures
provide slight invariance in rotation (depending on the
number of orientation bins), instead of smaller angle
we rotate the image in steps of 30
◦
each time up to
150
◦
. The detected window coordinates are rotated
and translated back with respect to the input image.
Saved window coordinates and the patches represent-
ing subwindows in the input image serves as an input
to the second stage. In our first stage, since the image
is rotated 6 times and then precessed to detect cars at
each rotation angle, it adds to the overall time taken
to evaluate the image. Currently, it takes less than 1
second on a 2.8 GHz intel processor with NVIDIA
GeForce GT 430 graphics card to extract hypothesis
windows at all rotations from a 1000x1000 image.
2.2 Part-based Detection
We now build a model which is strongly constrained
by part locations in the whole object. For this pur-
pose we adapt a sophisticated approach described
in (Felzenszwalb et al., 2010) to use as the second
stage detection model. Part-based models are built on
the pictorial structural framework, first introduced in
(Fischler and Elschlager, 1973). The main concept
introduced in (Felzenszwalb et al., 2008) was that of
”Latent SVM”, which enables the use of part posi-
tions as latent variables. The latent SVM formulation
of Equation (1) would be:
f
β
(x) = max
z∈Z(x)
β · Θ(x, z) (2)
where β is the concatenation of whole filter, part fil-
ters and deformation cost weights, z are latent values,
in this case part placements and Θ(x, z) is the con-
catenation of subwindows and part deformation fea-
tures. Part filters are defined at double the resolution
of root filter which means that they represent finer
edges compared to the root filter. The model for an
object with n parts is defined by a root filter and a
set of part models (P
1
, ..., P
n
). To make a decision on
whether the hypothesis window contains car or not,
we score the window according to the best possible
placement of the parts and threshold this score. A
placement of a model in HOG feature space is de-
fined by z = (p
0
, ..., p
1
), where p
0
is the location of
root filter and p
1
, ..p
n
are the location of part filters.
The score of placement z is expressed by Equation
(2). For further details about how the model is trained
using latent variables we recommend reading (Felzen-
szwalb et al., 2008).
Improving the Accuracy of the Part-based Detec-
tor:
1. When given a small search area, in this case ”hy-
pothesis windows” the object detector automati-
cally becomes more efficient, given the fact that
the detection need not be done at multiple scales
and rotations. In this case we, have fixed size win-
dows on which parts are located using the part fil-
ters and a confidence value is generated based on
the location of parts in the whole object.
2. We use 6 part filters as it shows slight improve-
ment in the detection rate in comparison to 4 or 5
parts.
3. Since the part models are used as the final decid-
ing model, we could increase the threshold (the
distance between the classifying plane and the
feature vector) slightly to be able to reduce false
alarms keeping the recall rate constant, thereby
having greater precision in overall detection.
Apart from improving the detection rate (see Table 1),
there are several advantages of using the two-stage
approach: First, for effective detection in a sliding
window approach, part-based decision model must
UsingWholeandPart-basedHOGFiltersinSuccessiontoDetectCarsinAerialImages
683
be applied at all positions (orientations, if we want
to have rotation-invariance detections). Considering
only the positions, the decision model would have to
make decisions for more than 900,000 windows for
a 1000x1000 image. In the current scenario, these
models are not fast enough to be used for such large
images. With our approach, we generate hypoth-
esis windows using the parallel implementation of
HOG+SVM. The number of windows, given as an in-
put to the second stage is reduced to a few hundreds
as against close to a million if we were to evaluate
directly with part-based detection method. Second,
the rotation-invariance and the scale factor is taken
care of in the much faster stage 1 of our algorithm.
Therefore, in the second stage, the need of evaluation
at multiple scales and orientations is averted which,
therefore, makes it more efficient apart from being
highly accurate.
2.3 Using Two Detectors in Sequence
In many cases, we have seen that a number of weak
classifiers are used in series and the decision is passed
from left-to-right. Normally, different sets of train-
ing samples are used in order to generate weak clas-
sifiers and the combination of weak classifiers gives
the final decision. However, in this case, we use two
strong classifiers using the same set of training sam-
ples. To use two classifiers in series, we should try not
to miss objects in the first stage, which is why, we re-
lax the detection parameters of the first stage. Given
the range of our test images, we deduce an optimal
threshold for detection, by which we make sure that
the minimal number of cars are missed. In Figure 5,
we show one example where we reduce the threshold
value (from (a) to (c)), so that all cars are detected.
This however, generates many false windows. Alto-
gether, we call them ”hypothesis windows”. Depend-
ing on the size and complexity of the image, num-
ber of such windows can be anywhere between 50
and 500 (note that the rotation-invariance detection
increases this number considerably). In this exam-
ple, we show that with a threshold of 0.8, all the cars
are detected. Likewise, we use the same threshold
value for evaluating all our test images. Also, using
the hypothesis windows from first stage allows us to
increase the threshold of the part-based detector to re-
duce the false alarms in the second stage. We also
compare the results obtained separately from stan-
dard HOG+SVM classifier (Dalal and Triggs, 2005),
part-based classifier (Felzenszwalb et al., 2010) and
our approach (see Figure 3 and Table 1). For com-
parison, we evaluate the images at fixed orientation
as Felzenszwalb’s part-based model is not rotation-
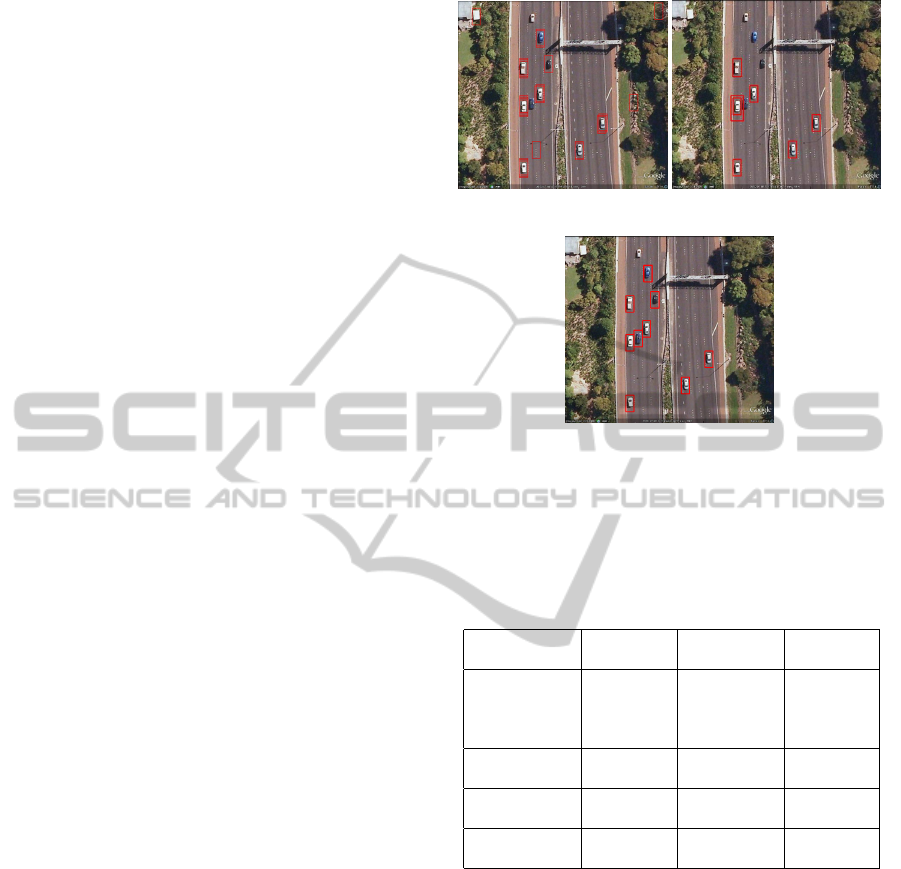
(a) Standard HOG+SVM approach (b) Part-based detection in the entire
image
(c) Our approach
Figure 3: Example comparing 3 different approaches -
We see that the sophisticated approach such as HOG part-
based models, when applied to a large image misses objects.
However, with our approach where we give hypothesis win-
dows as an input to the part-based approach, the detection
is improved to a great extent.
Table 1: Performance Comparison.
Dalal &
Triggs
Felzenszwalb
et al.
Our
approach
No of images
processed
(Fixed orien-
tation)
32 32 32
No of cars
present
240 240 240
Detection
Rate
65.1% 82.2% 91.1%
False Alarm
Rate
42% 5.2% 6%
Shows overall comparison of 3 methods in terms of
”detection rate” and ”false alarm rate”.
invariant. The Table 1 shows that our approach out-
performs the part-based detection method by 9% and
the HOG+SVM method by about 26%. This clearly
proves the superiority of using a whole and part filter
in succession as against the part-based detection alone
in a large-scale image.
3 RESULTS
We verify the performance of our method using the
images taken from Google Earth. The data set con-
sists of 35 images with varying urban background
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
684

(a) Threshold = 1.2 (b) Threshold = 1.0 (c) Threshold = 0.8 (d) Part-based detection applied on (c)
Figure 5: The first stage is designed is such a way that it detects nearly all the cars in our test data set. From (a) to (c), we
can see that lowering the threshold results in all the cars being detected. We call these detections as the hypothesis windows
which are given as an input to the part-based detection method. (d) shows the final result of the classifier.
(a) Positive Samples (b) Negative Samples
Figure 4: Training data samples -
c
Google 2011.
and multiple cars present in each image with image
size ranging from 700x700 to 1200x1200 (approxi-
mately). Training data (Figure 4) consists of about
200 cars and 600 non-car images. In these experi-
ments, we have kept the window size fixed to 48x96
because the size of cars is more or less within a con-
fined window size for a given altitude. For varying al-
titudes, the input image should be upscaled or down-
scaled depending on the height at which the image
is taken. In Figure 6, we see sample results, each
from Google Earth and an image from flight exper-
iment. In the first stage, the hypothesis windows are
generated at multiple orientations. Each of these sub-
windows is validated by the part-based models in the
second stage. Figure 8 displays few more results ob-
tained from our approach. The performance of our
system is analyzed by means of the precision-recall
curve shown in Figure 7. We see that the precision
rate and the recall rate remains above 85% for all our
test images. Table 2 gives a clearer picture of the over-
all performance. With this method, we could detect
90% of the total cars with a precision of 94%. It is
worth mentioning that out of 374 total cars present in
the test data set, 21 were missed in the first stage it-
self because of occlusion or shadows, which means
that the actual recall rate of the second stage stands at
95%.
(a) Google Earth image
(b) Image from flight experiment
Figure 6: Shows sample results from our two-stage ap-
proach. The rotation-invariant method is able to detect cars
at all orientation with high recall rate and good precision.
4 CONCLUSIONS
We presented a two-stage approach to detect cars in
aerial images. Instead of choosing several classifiers
in series (which is a more usual practice), we select
UsingWholeandPart-basedHOGFiltersinSuccessiontoDetectCarsinAerialImages
685

Figure 8: Shows some more results from Google Earth images.
Figure 7: Illustrates the performance of the two-stage algo-
rithm on Google Earth data set.
Table 2: Performance of our two-stage approach
No. of images
processed
No. of cars Overall
RR
Overall PR
36 374 90% 94%
The overall recall and precision rate gives a clearer picture
of an impressive performance obtained through our
approach.
two strong classifiers one after the other. In the pro-
cess, we improve the detection rate of the first clas-
sifier in order not to miss objects in the first stage
and improve the precision of the second classifier.
Hence, we were able to achieve a high recall rate and
with very high precision rate. We have achieved very
good results in terms of accuracy, however, to make
it a robust system, more work in this direction is re-
quired. Knowing that the proposed system performs
well, we would be interested in a faster implementa-
tion of sophisticated approach such as part-based de-
tection methods so that we are able to detect objects in
large images in real time. Besides, we expect to de-
velop a more efficient rotation-invariance scheme to
be used in the first stage.
REFERENCES
Chang, C.-C. and Lin, C.-J. (2001). LIBSVM: a library for
support vector machines.
Cortes, C. and Vapnik, V. (1995). Support vector networks.
In Machine Learning, volume 20, pages 273–297.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In International Con-
ference on Computer Vision & Pattern Recognition,
volume 2, pages 886–893.
Felzenszwalb, P., McAllester, D., and Ramanan, D. (2008).
A discriminatively trained, multiscale, deformable
part model. In Computer Vision and Pattern Recog-
nition, 2008. CVPR 2008. IEEE Conference on.
Felzenszwalb, P. F., Girshick, R. B., McAllester, D., and
Ramanan, D. (2010). Object detection with discrimi-
natively trained part-based models. IEEE Trans. Pat-
tern Anal. Mach. Intell., 32(9).
Fischler, M. A. and Elschlager, R. A. (1973). The repre-
sentation and matching of pictorial structures. IEEE
Trans. Comput., 22.
Han, F., Shan, Y., Cekander, R., Sawhney, H., and Kumar,
R. (2006). A two-stage approach to people and vehicle
detection with HOG-based SVM. In The 2006 Perfor-
mance Metrics for Intelligent Systems Workshop.
Hinz, S. (2003). Detection and counting of cars in aerial
images. In International Conference on Image Pro-
cessing.
Kembhavi, A., Harwood, D., and Davis, L. (2011). Vehicle
detection using partial least squares. Pattern Analy-
sis and Machine Intelligence, IEEE Transactions on,
33(6):1250 –1265.
Meng, X., Lin, J., and Ding, Y. (2012). An extended HOG
model: SCHOG for human hand detection. In Systems
and Informatics (ICSAI), 2012 International Confer-
ence on.
Monzo, D., Albiol, A., Albiol, A., and Mossi, J. (2011).
Color HOG-EBGM for face recognition. In Im-
age Processing (ICIP), 2011 18th IEEE International
Conference on.
Nguyen, T., Grabner, H., Bischof, H., and Gruber, B.
(2007). On-line boosting for car detection from aerial
images. In International Conference on Research, In-
novation and Vision for the Future.
Ruskone, R., Guigues, L., Airault, S., and Jamet, O.
(1996). Vehicle detection on aerial images: A struc-
tural approach. In International Conference on Pat-
tern Recognition, pages 900–904.
Wang, Q. J. and Zhang, R. B. (2008). LPP-HOG: A
new local image descriptor for fast human detection.
In Knowledge Acquisition and Modeling Workshop,
2008. KAM Workshop 2008. IEEE International Sym-
posium on.
Zhao, T. and Nevatia, R. (2001). Car detection in low res-
olution aerial image. In International Conference on
Computer Vision.
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
686
