
Opportunistic Spatiotemporal Routing in Wireless Sensor Networks
Seungmin Oh, Yongbin Yim, Jeongcheol Lee, Hosung Park and Sang-Ha Kim
Department of Computer Engineering, Chungnam National University, Daejeon, Republic of Korea
Keywords: Opportunistic Routing, Real-time Routing, Wireless Sensor Networks.
Abstract: We propose an opportunistic spatiotemporal data dissemination protocol in order to solve the transmission
failure problem in error-prone WSNs. Retransmission is well-known for recovery of transmission failure;
however, this may cause the severe time delay possibly to violate the real-time requirement. To solve the
problem, our protocol exploits both broadcasting nature and temporal opportunity concept. In a radio-range
of a sensor node, there may be multiple neighbor nodes to satisfy the real-time requirement. By
broadcasting property, all neighbors can receive a data from a node, and only each satisfying neighbor
decides its relay toward the destination by using temporal selection function. The temporal function is
related to the tolerable time period to be able to satisfy the real-time requirement. By giving the priority to
the node with smaller tolerable time, we have more opportunities to forward toward the destination. That is,
even if a node with a long tolerable time waits for the longer period of time, it still has a chance to forward
with the real-time requirement. In summary, the proposed protocol attains the high reliability and real-time
requirement by removing data retransmission and multiple opportunities with temporal consideration.
1 INTRODUCTION
Wireless Sensor Networks (WSNs) gather their
objective information from a large number of sensor
nodes with limited communication and computing
power. The sensor nodes generate reporting data
about events and forward them to sinks via multi-
hop communication. Many applications in WSNs,
such as battlefield surveillance and earthquake
response systems, should be tailored to interact with
fast changing events and required to gather the event
data in an application desired time deadline. The
geographical real-time data dissemination protocols
typically try to maintain a desired delivery speed
across the sensor network. The protocols choose the
nodes which have the relay speed faster than the
desired delivery speed. However, the protocols focus
the data dissemination within the desired time
deadline and do not consider the reliable
communication.
Several routing protocols have been developed
for reliable communication due to the limitation of
sensor nodes in error-prone WSNs. Some reliable
data dissemination schemes (Akyildiz, 2002) in
WSNs are based on the retransmission in which
either the source node or the relay nodes are
responsible for detecting packet loss and
retransmitting the lost packet for recovering error.
The schemes choose only a sensor node as a next-
hop node and transmit data packets to the selected
node. But, in case of transmission failure to the
selected node, the schemes should require data
retransmission to the same neighbor or possibly
another neighbour in order to increase reliability.
Other reliable data dissemination protocols
(Felemban, 2006) exploit the multipath routing. The
protocols make the multiple copies of data packets
and forward them through multiple paths. The data
redundancy could provide the high reliable
communication.
However, the reliable data dissemination
protocols still have some problems. The
retransmission protocols are well-known for
recovering the transmission failure; however, they
may cause the severe time delay possibly to violate
the real-time requirement. And the multipath routing
protocols only increase data delivery ratio but could
not assure that all data packet arrive at the
destination node. It also wastes an amount of
network energy, shortens the network lifetime and
leads to traffic congestion.
In this paper, we propose an opportunistic
spatiotemporal data dissemination protocol in order
to increase the reliability by using broadcasting
233
Oh S., Yim Y., Lee J., Park H. and Kim S..
Opportunistic Spatiotemporal Routing in Wireless Sensor Networks.
DOI: 10.5220/0004315702330236
In Proceedings of the 3rd International Conference on Pervasive Embedded Computing and Communication Systems (PECCS-2013), pages 233-236
ISBN: 978-989-8565-43-3
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
nature and temporal opportunity concept. By
broadcasting property, all the neighbors can receive
a data from a node. Among the neighbors, there may
be multiple sensor nodes which could fulfil the real-
time requirement, and each neighbour among the
nodes decides its relay toward the destination by
using temporal selection function. The temporal
function is related to the remaining time, which
stands for the tolerable time period to be able to
satisfy the real-time requirement. By giving the
priority to the node with smaller remaining time, we
have more opportunities to forward toward the
destination. That is, even if a node with a long
remaining time waits for the longer period of time, it
still has a chance to forward with the real-time
requirement. In summary, the proposed protocol
attains the high reliability and real-time requirement
by removing data retransmission and multiple
opportunities with temporal consideration.
Simulation results show that the proposed protocol is
superior to the existing protocols in terms of real-
time data dissemination.
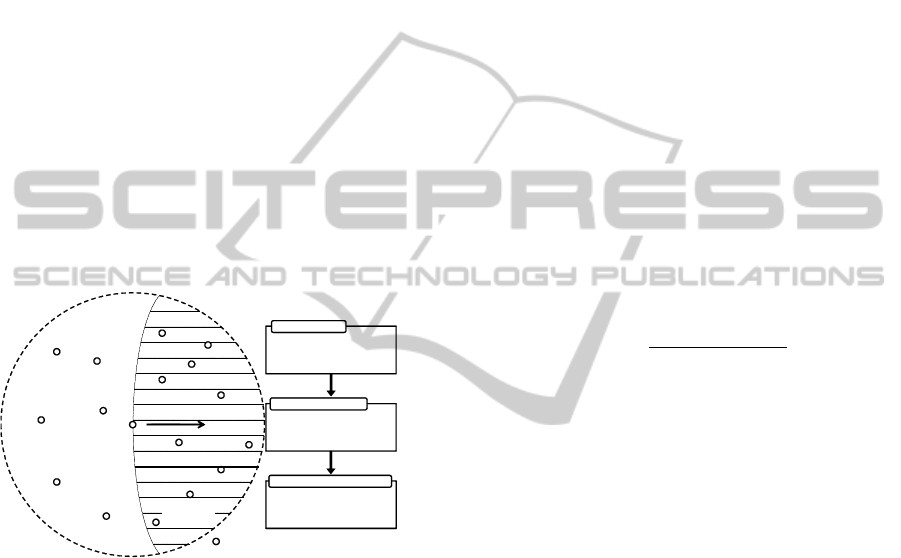
Figure 1: Next-hop candidate decision.
2 NETWORK MODEL
Our proposed protocol relies on several assumptions
that are explicitly and implicitly exploited in other
studies about real-time routing (He, 2005)
(Felemban, 2006) and many geographic unicasting
routing protocols (Akyildiz, 2002) as follows.
A large number of homogeneous sensor nodes
are deployed over a vast field, and then the nodes
self-organize an ad-hoc network. Long distance data
delivery is performed through multi-hop
communication manner.
Once a phenomenon appears, the sensor nodes
surrounding the phenomenon collectively gather
information and one of them becomes the source to
generate data of the phenomenon.
The source nodes that generate event data could
be provided the location of sink by one of the sink
location services.
For the geographic unicasting routing, which is
one of the stateless routing method, each sensor
node is aware of its own location after deployment
by receiving Global Positioning System (GPS)
signals or using some localization techniques.
Every sensor node has its own neighbor node
table including the coordinates and the estimated
delay of its neighbors by periodic beacon signaling.
The existing protocols (He, 2005); (Felemban, 2006)
for real-time data dissemination mainly exploit the
spatiotemporal approach in order to deliver data
from a source to a static sink within a desired time
deadline T
setdeadline
. While in multi-hop wireless
sensor network, since communication is physically
bounded, the end-to-end delay depends not only on
single hop delay (temporal), but also on the distance
a packet travels (spatial). For this, source nodes
initially calculate a desired delivery speed S
setspeed
with the time deadline and the end-to-end distance
d(source, sink) from the source to the sink as follows:
,
In the protocols, each node on the dissemination
route selects a node as its next-hop node which is
nearer to the sink and provides a better relay speed
than the desired delivery speed S
setspeed
. The relay
speed means the advance in distance to each next
node dividing by the delay to forward a packet to the
each next node. The end-to-end real-time data
dissemination is achieved by maintaining the desired
delivery speed from sources to the sink. However, if
the sink moves around, the distance between them
changes dynamically, so that the end-to-end distance
and the data delivery speed S
setspeed
should be also
altered. But the re-calculation of the distance and the
delivery speed per every hops let the sensor nodes
have an amount of computing overhead.
3 OPPORTUNISTIC REAL-TIME
ROUTING PROTOCOL (ORRP)
For routing, sender nodes have the two following
tasks: next-hop selection and data forwarding. The
sender nodes select one node as the next-hop node
among its 1-hop neighbor nodes. Then, the nodes
include the address or geographical coordinates of
the next-hop node into data packets for the next-hop
node to receive the packets. In the proposed
Broadcasting Range
Greedy Area
N1 – 3m/s
N2 – 6m/s
N3 – 7m/s
N4 – 4m/s
N5 – 8m/s
N7 – 3m/s
N8 – 5m/s
N9 – 6m/s
N10 – 4m/s
N6 – 5m/s
S
setspeed
= 5m/s
N16
N15
N14
N13
N12
N11
N1, N2, N3, N4, N5,
N6, N7, N8, N9, N10
Greedy Nodes
N2, N3, N5, N6, N8, N9
Forwarding Candidates
N5, N8, N9, N3, N2, N6
(if, T
N5
< T
N8
< T
N9
< T
N3
< T
N2
< T
N6
)
Ordered Forwarding Candidates
Node_Number – Delivery Speed
Toward Si nk
PECCS2013-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
234
protocol, the selection of the next-hop node is
determined by the next-hop candidates. The next-
hop candidates could receive the data packets from
its previous sender. The proposed protocol gives the
opportunity for data packet forwarding to receiver
nodes that receive the data packets successfully.
Before the data forwarding, each nodes obtain the
information of its own neighbor nodes by beacon
signaling. The information includes the location of
neighbor nodes and the processing time for a data
packet, namely, hop delay. Similar to other real-time
data dissemination protocols, each node keeps a
neighbor table to store the information. By the
information, the each forwarding nodes select the
candidate node as its next-hop node which are closer
to the destination (sink) and which delay speed is
faster than desired speed Ssetspeed. In the proposed
protocol, sender nodes include the list of candidates
into the packet header. The data packets are
broadcasted by the sender node. The neighbor nodes
which receive the data packets determine whether
itself will forward the data packets or not, with the
information of the packets.
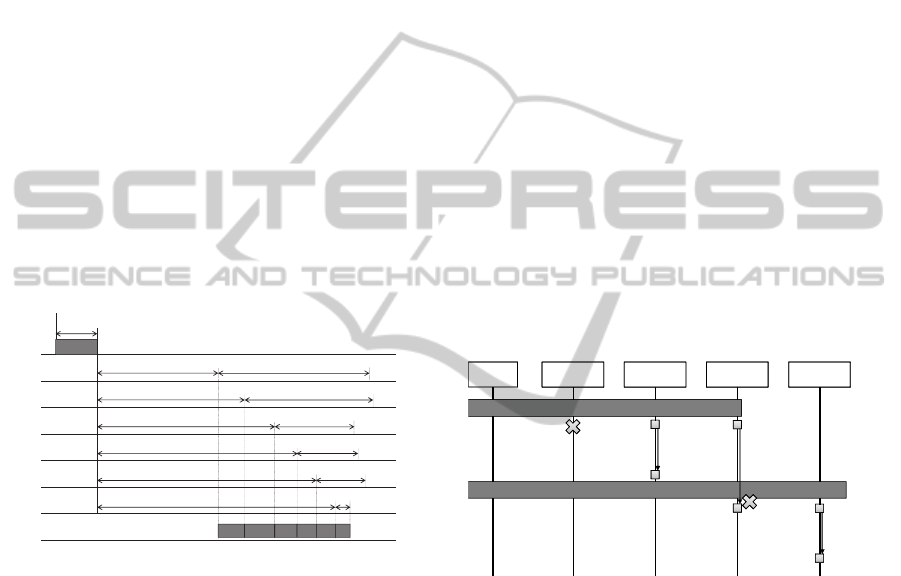
Figure 2: Temporal opportunity.
Before forwarding data packets, sender nodes
(including source nodes) select the candidates that
will receive the data packets. Neighbor node set NS
i
includes the multiple neighbor nodes within the
radio range of the node i. As described above, the
node i stores the coordinates and single hop delay of
the members in NS
i. The node divides NSi with the
forwarding candidate set and the non-forwarding
candidate set. For the forwarding candidate set, the
proposed protocol chooses some nodes which are
closer than the sender node toward the destination.
Based on the set, the sender node calculates the relay
speed RS
Cn
of each node n
Cn
with the following
equation:
where dist(n, dest) is the distance between the node
n and the destination and hopdelay
Cn
i
is the single
hop delay from the node i to the node Cn. In the
forwarding candidate set, only the neighbor nodes,
which have the larger relay speed than the desired
delivery speed, are included. The forwarding
candidate set list and the single hop delay of the
forwarding candidates are sent with the data packets
to the candidates. The forwarding candidate set in
the data packet is sorted with the single hop delay in
order to preferentially select the node which has the
shortest hop delay. As shown in Fig. 1, the sorted list
could provide the opportunity to forward data
packets to maximum candidates. The candidates
could relay the data packets after the sum of
transmission delay T
data
and their own single hop
delay T
ni
due to the queueing delay of the sensor
nodes. And the data packets could not be forwarded
after the per-hop desired time deadline since the data
packet is out-dated after that time. The per-hop
desired time T
hop-deadline
between node i and node Cn is:
(dist(n
i
,dest)-dist(n
Cn
,dest))/ S
setspeed
. As a result, the
data packets should be forwarded in the time from
T
ni
to T
hop-deadline
. The nodes have the data forwarding
opportunity in order of the single hop delay. By the
temporal opportunity, the i
th
node could forward data
packets in T
i
~ T
i+1
.
Figure 3: Time diagram for next-hop decision.
The sensor nodes, which receive data packets
and forwarding candidate list from their upstream
node, decide whether they will relay the data packets
or not. First, nodes check that the node is included in
the forwarding candidate list. If the node is one of
the candidates, the node sets its timer with its single
hop delay. As shown in Fig. 2 and 3, all candidates
start their timers. The node C1 needs not to start the
timer since C1 does not receive the data packets
successfully. The candidates overhear the same
packet transmission of the other candidates because
the multiple candidates could concurrently send the
packet. It might cause the transmission failure due to
the collision. The overheard node cancels its own
timer and discards the data packet. If the timer of a
candidate is released with no overheard transmission,
the node starts the next-hop forwarding for the data
DATA
Sender
N5
N8
N9
N3
N2
N6
T
N5
T
N8
T
N9
T
N3
T
N2
T
N6
Temporal Opportunity
O
N5
O
N8
O
N9
O
N3
O
N2
O
N6
T
data
((, ) (, ))/
Cn
Cn
iCn i
RS
dist n dest dist n dest hopdelay
Sender Candidate1 Candidate2 Candidate3
Next-hop
Candidates
Broadcasting the packet #n from the sender
Transmission
Failure
Timer set
Timer set
Broadcasting the packet #n from the candidate2
Overheard &
Timer canceled
Timer set
Overheard Overheard
OpportunisticSpatiotemporalRoutinginWirelessSensorNetworks
235
packet. The opportunistic routing has a constraint
that the nodes in forwarding candidate set should be
able to hear from each other. Otherwise, the packet
duplication would occur. For prohibiting from the
packet duplication, the previous node sends a control
message for timer cancel. Because only the previous
sender node could send the message to all candidates
including not-overheard candidates.
4 PERFORMANCE
EVALUATION
We have implemented the proposed protocol in the
Qualnet network simulator. We compare the
proposed protocol with SPEED (He, 2005) and
MMSPEED (Felemban, 2006), the most popular
real-time protocols. The simulation network space
consists of 500 sensor nodes uniformly deployed in
a 500m X 500m square area. The radio range of each
sensor nodes is about 50m. The source node
generates 30 byte-data packets with interval 0.05s.
The simulation time is 50s and the required
reliability is 85%. The results are the average value
of 100 times of simulation.
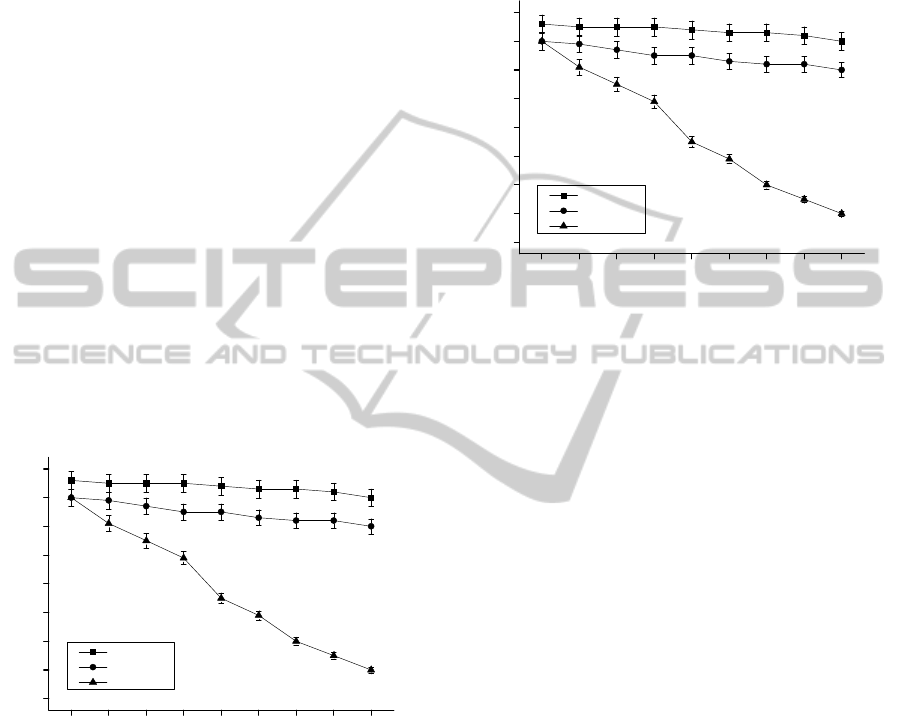
Figure 4: Time diagram for next-hop decision.
Figure 4 and 5 show the TDSR impacted by the
end-to-end distance and the number of sensor nodes.
In SPEED, the longer the end-to-end distance, the
lower the time deadline success ratio. It is because
that SPEED does not consider the packet reliability
and a number of data packets are lost in SPEED. The
TDSR of MMSPEED is similar to the desired
reliability since MMSPEED branches the multiple
paths when the calculated reliability is under the
desired reliability. The multiple path increases the
time deadline success ratio. The proposed protocol
results in the high TDSR since the per-hop reliability
is proportional to the opportunity to forward data.
The number of sensor nodes means the node density
in the sensor field. The larger the node density is, the
larger the number of 1-hop neighbor nodes is. As the
number of sensor nodes increases, the TDSR is
converged to almost 95%.
Figure 5: Time diagram for next-hop decision.
5 CONCLUSIONS
In this paper, we propose an opportunistic routing
protocol for real-time data in order to increase the
reliability of transmission. Since our protocol gives
the opportunities to forward data to multiple
neighbor nodes, using the nature of broadcasting and
the temporal opportunity distribution, the protocol
could increase the reliability of real-time data.
REFERENCES
Akyildiz, I. F. et al., 2002. A survey on sensor networks,
IEEE Communications, Vol. 40, No. 8, pp.102-114.
He, T. et al., 2005. A Spatiotemporal communication
protocol for wireless sensor networks, IEEE
Transactions on Parallel and Distributed Systems, Vol.
16, No. 10, pp.995-1006.
Felemban, E., Lee, C., and Ekici, E., 2006. MMSPEED:
Multipath Multi-SPEED Protocol for QoS Guarantee
of Reliability and Timeliness in Wireless Sensor
Networks, IEEE Transactions on Mobile Computing,
Vol. 5, No. 6, pp. 738-754.
100 150 200 250 300 350 400 450 500
20
30
40
50
60
70
80
90
100
TDSR (Time Deadline Success Ratio, %)
End-to-end Distance (m)
ORRP
MMSPEED
SPEED
100 150 200 250 300 350 400 450 500
20
30
40
50
60
70
80
90
100
TDSR (Time Deadline Success Ratio, %)
End-to-end Distance (m)
ORRP
MMSPEED
SPEED
PECCS2013-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
236
