
Comparison and Multi-GPU based Implementation of a Collision
Detection Method with Z-buffer in Cyber Space
Tomoaki Iida, Hidemi Yamachi, Yasushi Kambayashi and Yasuhiro Tsujimura
Department of Computer and Information Engineering,
Nippon Institute of Technology, 4-1 Gakuendai Miyashiro-cho, Minamisaitama-gun, Japan
Keywords: Z-buffer, Collision Detection, Object Detection, Cyber Radar.
Abstract: We propose a new technique to detect objects and collisions of geometric objects in cyber space. This
technique uses depth values of the Z-buffer in rendering scene, and contributes to construct an intelligent
interface for mobile software agent that uses augment reality. We use the orthographic projection for
collision detection. Our method uses two depth value sets. One is obtained through rendering the cyber
space from the sensor object toward a target point. This set does not have the depth values of the sensor
object. Another one is obtained through rendering only the sensor object in the reverse direction. From these
two depth value sets, we obtain the distance between the sensor object and others for each pixel. This
technique requires only one or two rendering processes and it is independent from the complexity of object's
shape, deformation or motion. In this paper we evaluate the efficiency in comparison with one of the most
popular collision detection method. GPU based methods have advantage for utilizing multi-GPU system. In
order to take the advantage, we have implemented our method for multi-GPU system and evaluate the
performance of collision detection.
1 INTRODUCTION
In the last decade, robot systems have made rapid
progress not only in their behaviors but also in the
way they are controlled. We have demonstrated that
a control system based on multiple software agents
can control robots efficiently (Kambayashi et al.,
2009). We have constructed various mobile multi-
robot systems using mobile software agents.
In order to augment the usability and efficiency,
Kurane et al. propose an intelligent interface that
enables for users to assist the behaviors of the
mobile software agents by visualizing the mobile
software agents using augmented reality (AR)
(Kurane et al., 2013).
When implementing AR for mobile software
agents, it is important to detect their collisions in
order to construct natural scene with co-existing
multiple agents on a robot. We have proposed an
algorithm for the collision detection of geometric
objects named Cyber Radar (Yamachi et al., 2011).
In this paper, we describe the details of our method
and show the efficiency of it through the
comparative experiment with one of the most
popularly used collision detection method. We also
implement into multi-thread with multi GPU and
evaluate the performance by numerical experiments.
The rest of this paper is organized as follows. In
the next section, we briefly review related works. In
section 3, we describe the details of our object
detection algorithm. We show the efficiency of our
method through numerical experiments in section 4.
We conclude our discussions in section 5.
2 RELATED WORKS
Since 1980s, many researches have been conducted
to solve the collision detection problems. There are
two basic ideas for collision detection algorithms.
One technique uses bounding volume hierarchy
(BVH) which consists of convex hulls. Convex hulls
hierarchically cover an object from the whole to
each part. AABB (Bergen, 1997), Bounding Sphere
(Hubbard, 1996), OBB (Gottschalk et al., 1996) are
well known and being used. Because those
techniques detect collisions only one pair of objects
at once, they have O(n
2
) computational complexity
for n objects.
435
Iida T., Yamachi H., Kambayashi Y. and Tsujimura Y..
Comparison and Multi-GPU based Implementation of a Collision Detection Method with Z-buffer in Cyber Space.
DOI: 10.5220/0004331204350438
In Proceedings of the 5th International Conference on Agents and Artificial Intelligence (ICAART-2013), pages 435-438
ISBN: 978-989-8565-38-9
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

3 MECHANISM OF CYBER
RADAR
In order to detect other objects in the target area, we
set the view point at the sensor object (Figure 1). By
defining the orthogonal view volume which has the
same depth as the length of the sensor object and the
distance to move, as the target area, the scene is
rendered without the sensor object (Figure 2). We
call the obtained depth value set Range Distance
Scope denoted as R. If there are any pixels in the
Range Distance Scope that have the depth values
less than the target area distance d, there are some
objects in the target area.
If some objects are detected in the target area, the
collision detection is performed. The view point is
set at the other side of the target area with the
direction toward the sensor object. Then only the
sensor object is rendered to obtain the depth value
set. We named the depth value set Mask Distance
Scope denoted as M. With these two depth value
sets, we can obtain the distances between the sensor
object and other objects. We named this distance
value set LookAt Distance Scope denoted as L.
Before we describe the detail algorithm of Cyber
Radar, we define the following notations.
p
w
, p
h
: Pixel width and height of depth values
i = 1,2,… , p
w
, j = 1, 2, …, p
h
R: Range Distance Scope , a set of R
ij
M: Mask Distance Scope , a set of M
ij
L : LookAt Distance Scope , a set of L
ij
d : Target area distance
The distance between prove point and a target
object is d – R
ij
and the distance from the end of the
target area to the sensor object is d – M
ij
. Using these
values, the pixel value of LookAt Distance Scope
becomes as follows.
L
ij
= d – (d – R
ij
) – (d – M
ij
) = R
ij
+ M
ij
– d
(1)
Sensor Ob
j
ect
d
p
w
p
h
Distance to move
Figure 1: Definition of viewing volume.
If min(L), the minimum value of L, is less than
the distance to move, the collision will occur at the
pixel. The time of collision is calculated from
min(L) and the velocity of objects.
The algorithm of Cyber Radar is described as
follows.
1. Set up the rendering conditions (Figure 1)
View point at the sensor object
Rendering direction toward sensor object
to move
width and height of the target area
d
:= Target area distance
p
w
,p
h
:= Projection width and height
2. Render scene without the sensor object
(Figure 2)
3. Obtain R (Range Distance Scope)
4. if min(R) = d
return false (no object)
else
return true (objects are detected)
5. Set the rendering conditions (Figure 3)
View point at the end of the target area
Rendering direction toward sensor object
6. Render scene only sensor object
7. Obtain M (Mask Distance Scope)
Swap right and left pixel values
8. Calculate L (LookAt Distance Scope)
(Figure 4)
L := R + M – d
(2)
if min(L) > Distance to move
return false (no collision)
else
return true (collision is detected)
Draw onl
y
tar
g
et ob
j
ects
Direction to draw
d
R
ij
Figure 2: Range Distance Scope.
4 NUMERICAL EXPERIMENTS
We conducted two types of experiments. First, we
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
436

compare the performance of Cyber Radar with
Axis-aligned bounding box (AABB). We use
OPCODE for AABB collision detection
implementation. Figure 5 shows the experiment
scene. We allocate rectangular shaped objects and
change the number of objects from 10,000 to 30,000
by 2,000 to obtain the time for collision detection.
The environment is Windows7,CPU Intel Core i7
3.4GHz , GPU NVIDIA GTX 560 , 4Gbyte
memory.
Table 1 and Figure 6 show the results of the
experiment. The time of AABB varies almost
linearly while that of Cyber Radar is almost constant
when the number of objects is more than 16,000.
Since the performance of Cyber Radar largely
depends on the GPU, Cyber Radar is effective than
AABB for large number of objects to be tested
collision detection.
GPU based methods have advantage by utilizing
multi-GPU system. In order to take the advantage of
multiple GPU, we have implemented our method for
multi-GPU system based multi-thread program and
evaluate the performance of collision detection.
M
ij
d
Draw only sensor object
Direction to draw
Figure 3: Mask Distance Scope.
L
ij
M
ij
R
ij
Figure 4: Look At Distance Scope.
We compare the time to complete the collision
detection by single-thread and multi-thread
procedures. In the case of multi-thread, the time
means between the start time of the first thread and
the finish time of the last thread. We have used two
GPUs and generate multi-threads for collision
detection. The experimental environment is
WindowsXP, CPU Intel Core i7 3GHz, GPU
NVIDIA Quadro2000, 3Gbyte memory.
We have employed five to thirty teapots with
6256 polygons moving through many fixed boxes.
All of tea pots are sensor objects and detect collision
at each time step. The results are shown in Figure 7.
Two GPU cases take about half of one GPU cases
for each sensor object number.
5 CONCLUSIONS
We propose a novel technique to detect objects and
collisions of geometric objects in cyber space. This
technique uses depth values of the Z-buffer in
rendering scene. We use the orthographic projection
for collision detection. By using this method, we
should be able to produce natural AR scenes for the
intelligent human computer interface we are
building.
We have conducted experiments to evaluate the
efficiency of Cyber Radar in comparison with
AABB, one of the most popular collision detection
methods. The results show that the Cyber Radar is
more effective than AABB in case of more than
16,000 objects for collision detection.
We also implemented Cyber Radar as a multi-
thread procedure with multiple GPUs and evaluate
the difference of collision detection time with single
GPU procedure. Two GPU procedure performs in
half of time that of the single GPU procedure.
Figure 5: Scene of experiment for collision detection.
White rectangle is target area of Cyber Radar.
ComparisonandMulti-GPUbasedImplementationofaCollisionDetectionMethodwithZ-bufferinCyberSpace
437
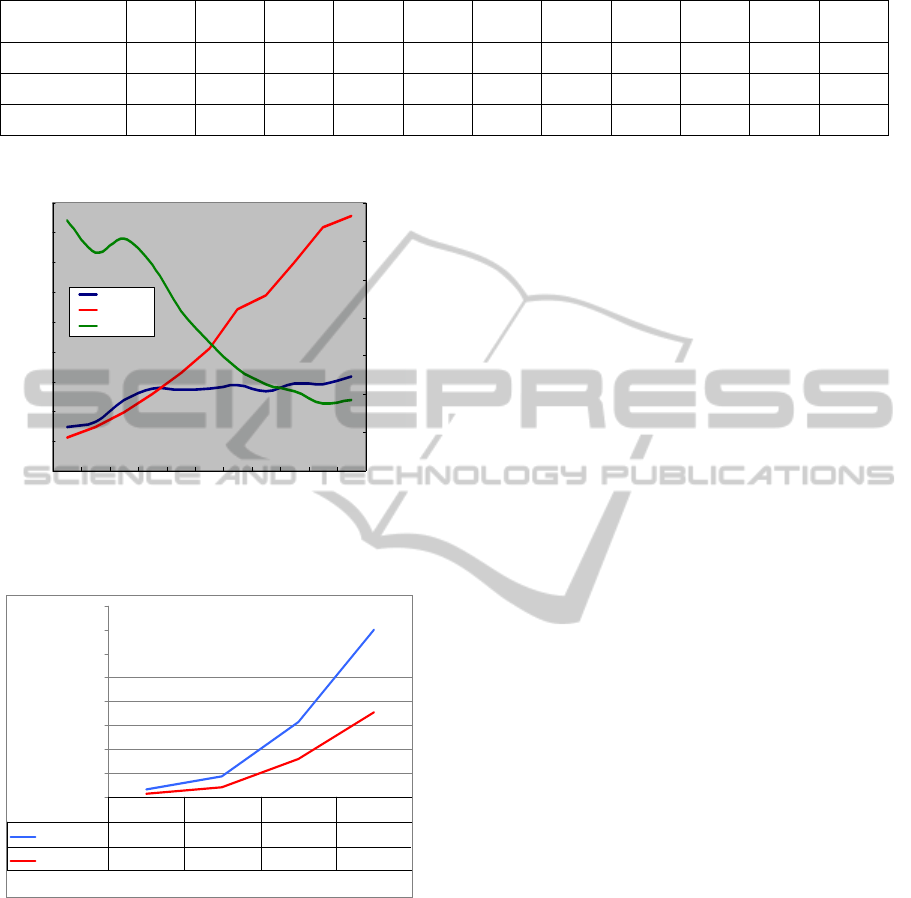
Table 1: Percentage of detection time of Cyber Radar (CR) for AABB.
10,000 12,000 14,000 16,000 18,000 20,000 22,000 24,000 26,000 28,000 30,000
CR(msec) 14.73 16.54 23.75 27.66 27.37 27.44 28.82 26.66 29.21 28.90 31.52
AABB(msec) 11.27 14.53 19.59 25.68 32.72 40.92 54.22 58.88 70.15 81.85 85.48
CR/AABB(%) 130.72 113.84 121.21 107.72 83.63 67.04 53.15 45.28 41.64 35.31 36.88
0.00
10.00
20.00
30.00
40.00
50.00
60.00
70.00
80.00
90.0
0
10, 000 12, 000 14, 000 16,000 18,000 20, 000 22,000 24, 000 26, 000 28, 000 30, 000
Number of object s
Detection time(msec)
0.00
20. 00
40. 00
60. 00
80. 00
100. 00
120. 00
140. 00
CR / AABB ( % )
CR ( msec )
AABB ( msec )
CR/ AABB( %)
Figure 6: Detection time for different numbers of objects
for Cyber Radar (CR) and AABB.
0.00
100.00
200.00
300.00
400.00
500.00
600.00
700.00
800.00
Number of objects
Detection time(msec
)
Single-thread
30.76 86.73 314.41 699.37
Multi-thread
14.00 42.67 159.76 354.90
5102030
Figure 7: Performance of multi-GPU based procedure.
Producing natural AR scenes may include lots of
complex objects that have to be tested for collision.
The results of experiments show that Cyber Radar is
effective to produce such scenes. However,
detecting many collisions with Cyber Radar takes
much computational cost. In order to mitigate this
problem, we have implemented multiple GPU
procedure. Through the experiments we can confirm
that Cyber Radar is easy to implement.
Applying this method for constructing the
intelligent human computer interface is our next aim.
ACKNOWLEDGEMENTS
This work is partially supported by Japan Society for
Promotion of Science (JSPS), with the basic
research program (C) (No. 23510178), Grant-in-Aid
for Scientific Research.
REFERENCES
Bergen, G. van den. (1997). Efficient Collision Detection
of Complex Deformable Models using AABB Trees.
Journal of Graphics Tools, vol.2, no.4, 1-14.
Gottschalk, S. Lin, M. C. Manocha, D. (1996). OBBTree:
A Hierarchical Structure for Rapid Interference
Detection, Proceedings of ACM SIGGRAPH '96, 171-
180.
Hubbard, P. M. (1996). Approximating Polyhedra with
Spheres for Time-Critical Collision Detection, ACM
Transactions on Graphics, vol. 15(3), pp.179-210.
Kambayashi, Y., Ugajin, M., Sato, O., Tsujimura, Y.,
Yamachi, H. and Takimoto, M. (2009). Integrating
Ant Colony Clustering Method to Multi-Robots Using
Mobile Agents, Industrial Engineering and
Management System, vol.8, no.3, 181-193.
Kurane, K., Takimoto, M. and Kambayashi, Y. (2013).
Design of an Intelligent Interface for the Software
Mobile Agents Using Augmented Reality,
Proceedings of International Conference on Agents
and Artificial Intelligence, to appear.
Yamachi, H. Souma, Y. Kambayashi, Y. Tsujimura, Y.
and Iida T. (2011). Evaluation of a Technique for
Collision and Object Detection with the Z-buffer in
Cyber Space. Proceedings of International Conference
on Cyberworlds 2011, 85-92.
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
438
