
Design of an Intelligent Interface for the Software Mobile Agents
using Augmented Reality
Kazuto Kurane
1
, Munehiro Takimoto
2
and Yasushi Kambayashi
3
1
Graduate School of Computer and Information Engineering, Nippon Institute of Technology,
4-1 Gakuendai, Miyashiro-machi, Minamisaitama-gun, Saitama, Japan
2
Department of Information Sciences, Tokyo University of Science, 2641 Yamazaki, Noda, Chiba, Japan
3
Department of Computer and Information Engineering, Nippon Institute of Technology,
4-1 Gakuendai, Miyashiro-machi, Minamisaitama-gun, Saitama, Japan
Keywords: Agent, Mobile Agent, Augmented Reality, Kinect, Gesture.
Abstract: In this paper we propose an intelligent interface for the mobile software agent systems that we have
developed. The interface has two roles. One is to visualize the mobile software agents using augmented
reality (AR) and the other is to give human users a means to control the mobile software agents by gesture
using a motion capture camera. Through the interface we human beings can intuitively grasp the activities
of the mobile agents, i.e. through augmented reality. In order to provide proactive inputs from user, we
utilize a Kinect motion capture camera to recognize the human users’ will. The Kinect motion capture
camera is mounted under the ceiling of the room, and they monitor the user as well as robots. When the user
points at a certain AR image, and then points at another robot through gesture, the monitoring software
recognizes the will of the user and conveys instructions to the mobile agent based on the information from
the Kinect. The mobile agent that is represented by the image moves to the robot that was pointed. This
paper reports the development of the intelligent user interface described above.
1 INTRODUCTION
In the last decade, robot systems have made rapid
progress not only in their behaviors but also in the
way they are controlled. We have demonstrated that
a control system based on multiple software agents
can control robots efficiently (Kambayashi et al.,
2009). We have constructed various mobile multi-
robot systems using mobile software agents (Abe et
al., 2011).
In the constructions, the mobile agents are bulit
as autonomous entities. Human users have no roles
to control the mobile software agents. However, in
an application of multiple robots searching for an
object, and if the user knows the location of the
object, the user should be able to tell the mobile
software agent that control the mobile robots where
to migrate, then the controlling software agent can
move to the most conveniently located mobile robot,
thus can capture the object without unnecessary
movements. In this paper, we propose an intelligent
interface that has two roles. One is to visualize the
mobile software agents using augmented reality
(AR) and the other is to give human users a means to
control the mobile software agents by gestures using
a motion capture camera. We believe that our
intelligent interface system opens a new horizon of
the interaction between human users and
autonomous mobile software agents and robots.
The structure of the balance of this paper is as
follows. In the second section we describe the
background. The third section describes the design
of the system, and the fourth section describes how
the design is implemented. We conclude the
discussion and present the future directions in the
fifth section.
2 BACKGROUND
It is common to observe that sensors and robots are
connected in networks today. We have studied
hierarchical mobile agent systems in order to control
them systematically. In particular, we have pursued
a development of the control system for autonomous
robots using mobile software agents (Abe et al.,
439
Kurane K., Takimoto M. and Kambayashi Y..
Design of an Intelligent Interface for the Software Mobile Agents using Augmented Reality.
DOI: 10.5220/0004331304390442
In Proceedings of the 5th International Conference on Agents and Artificial Intelligence (ICAART-2013), pages 439-442
ISBN: 978-989-8565-38-9
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

2011); (Kambayashi et al., 2009). On the other hand,
we have not investigated any user interface for
mobile agents, even though there are quite a few
research and developments of visualizing software
entities using AR (Azuma, 1997); (Feiner et al.,
1993); (Tomlinson et al., 2005). We have not
provided any means for users to intervene the
behaviours of the mobile software agents after their
departure.
If there is an interface that let a user can control
software agents intuitively, the user can
communicate with agents and thus with robots. The
interface will widen the range of the applications by
using such techniques. Therefore, we are developing
a visual representation of the mobile software agent
by using AR. The user will be able to intuitively
grasp the presence of the mobile software agent by
their AR representations. In addition to the
representation, we are developing an intuitive means
of control them by gesture using Xbox Kinect.
Xbox Kinect was developed by Microsoft to
provide intuitive interface in game machines
manufactured by the same company (Microsoft,
2012). The development of Kinect SDK opened the
various human computer interface researches using
Kinect. Kinect can be employed in the human
interface of the robot systems with the SDK. We
have developed an interface that recognizes users'
gestures using the Kinect. The interface also directs
the mobile agents to migrate over the robots when
the user points at. If a user can communicate with
software agents as well as mobile robots by an
intuitive method the width of the applications over
mobile robots should widen.
We have developed the mobile agent
environment using Agentspace. Agentspace is a
framework to build mobile agent environment and is
developed by Ichiro Sato (Satoh, 1999). In the
environment, a mobile software agent is defined as a
set of callback methods in Agentspace.
In our development, we utilize AR using
ARToolKit. ARToolKit is a library for realizing
augmented reality developed by Hirokazu Kato
(Kato, 2002). The library makes the implementation
of the real time AR relatively easily. Since each
robot has a unique marker, when the web camera
finds the marker in the image, ARToolKit calculates
the position and orientation of the marker. Then we
can project a virtual object on the basis of
information on the position and posture. An agent's
existence is represented as a virtual object on the
marker. When the agent moves from a robot to
another robot, ARToolKit erases the virtual object
on the image of the source robot and put the same
virtual object on the image of the destination robot.
The interface provides visual representations of
the mobile software agents, and depicts how they
move between the robots in the manner described
above. Figure 1 shows a virtual object that
represents a software agent that sits on the marker.
Since ARToolKit can acquire the three-dimensional
coordinates of the marker seen from the camera, the
system determines which robot the user points using
three-dimensional coordinates of the joints of the
human user and the three-dimensional coordinates of
the markers.
Figure 1: A virtual object on a robot.
3 SYSTEM DESCRIPTION
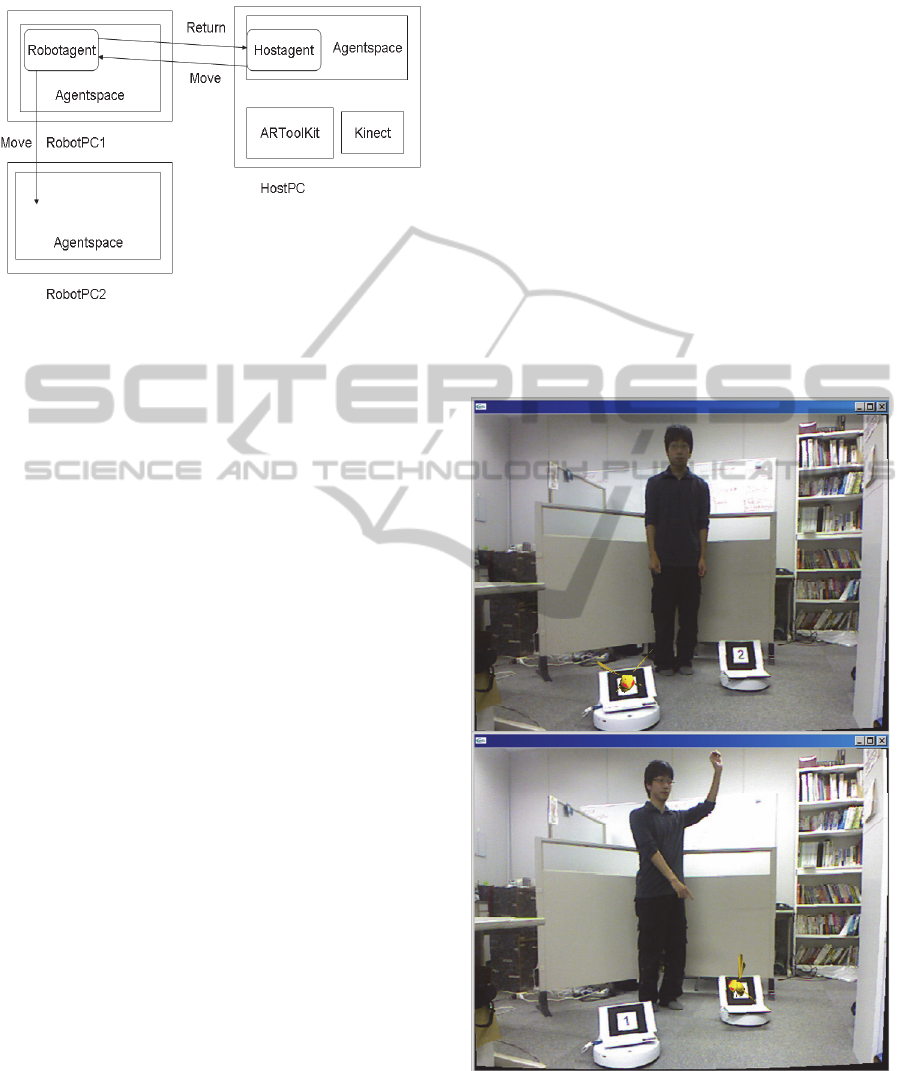
Figure 2 shows the schematic diagram of the system.
The system is assumed to be used indoors. The
system consists of a host PC, Kinect, multiple robots
with PCs. Host PC and PCs on the robots are
connected by the Internet.
In the system, there are two types of agents. They
are robot agents, which migrate to robots to drive
them, and a host agent. Robot agents can reside in
any PC on the robots that are connected by the
networks. A robot agent controls the residing robot
while it is moving. The host agent is an agent and
resides in the host computer, and occasionally visits
PCs on the robots to give the moving instructions to
robot agents.
When the user performs a gesture, the host agent
conveys the instructions for the robot agent by
migrating to the robot on which the agent resides.
When the robot with which a robot agent exists is
captured by the camera of Kinect, ARToolKit
projects the virtual object which expresses a robot
agent on the robot in the screen. Kinect is connected
to host PC. Kinect is installed under the ceiling of the
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
440
room and monitors the user and the robots.
Figure 2: Schematic diagram of the system.
ARToolKit expresses a robot agent's movement
in the following manner. Each robot has a unique
marker on it. ARToolKit projects a virtual object
expressing a robot agent on the marker on the robot
on which the robot agent resides. When a robot
agent migrates from a robot to another robot,
ARToolKit changes the marker on which the virtual
object is projected from the marker on the source
robot to the marker on the destination robot. Thus
the virtual object representing the robot agent moves
from the source robot to the destination robot.
When the user performs a certain gesture, Kinect
recognizes the gesture and determines which robot
the user points by the following methods. The user
raises the left hand while pointing at the robot on
which the desired agent resides and then points at
the robot to which the user wants the agent moves.
The user declares that he is performing gesture to
Kinect by raising his left hand. Kinect acquires the
three-dimensional coordinate of the right hand, right
shoulder, and right knee by the captured image from
the camera. Kinect makes a straight line connecting
the point of the right shoulder and the right hand of
the user. The straight line is extended up to the
height of the user's knee. Kinect gets the point that
the field in the knees and straight line crossed. That
point is where the user is pointed. The system
acquires the three-dimensional coordinate of each
marker by the camera and projects on the screen
using ARToolKit. The system can measure the
distance between the coordinates that the user points
and the coordinate of each marker. The robot agent
moves to the robot with that marker.
4 IMPLEMENTATION
The system we are developing needs to use two or
more markers. However, ARToolKit can read only
one kind of marker. Therefore we extended
ARToolKit so that it can read several markers.
Furthermore, we have created a special file that
assists the management of the projection of virtual
objects by the extended ARToolKit. The information
which marker the extended ARToolKit should use to
project a virtual object on the screen image is written
in this file. The extended ARToolKit decides which
object it should project on a particular marker by
reading this file. The host agent can switch the
markers on which the virtual object be displayed by
rewriting this file. Thus the host agent can manage
the projection of the virtual objects that represent the
robot agents.
Figure 3: A virtual object moves from a robot to a robot
along with a mobile agent.
The followings are how the system moves the virtual
objects in the cyber space as well as the robot agents
in the physical space.
DesignofanIntelligentInterfacefortheSoftwareMobileAgentsusingAugmentedReality
441

1. After having pointed at the robot on which the
user wants the robot agent to move by the right
hand, the user raises the left hand.
2. Kinect recognizes the user has performed a
gesture.
3. Kinect recognizes which robot the user is
pointing at by using the coordinates of the
markers and the coordinates of the joints of the
user.
4. Kinect sends the information about the pointed
robot to the host agent.
5. The host agent rewrites the file which has the
managing information of the display of the
virtual objects in the extended ARToolKit.
6. The extended ARToolKit projects the virtual
object which represents the mobile agent on the
robot which the robot agent is supposed to move
to.
7. The host agent moves to the PC on which the
robot agent resides.
8. The host agent passes the information to the
robot agent to which robot it should move.
9. The robot agent moves to the robot that the user
has pointed.
10. The host agent is returned to the host PC.
By the operations described above, the system
makes it possible to visually represent the software
agents that are moving between the robots and the
user directs the agents by gestures. Figure 3 shows a
user performing the gestures to direct a software
agent.
5 CONCLUSIONS AND FUTURE
DIRECTIONS
We have proposed an intelligent interface for the
mobile software agent systems that we have
developed. Through the interface, the users can
intuitively grasp the activities of the mobile agents.
In order to provide proactive inputs from user, we
have utilized the Kinect motion capture cameras to
capture the users’ will expressed by the gestures.
Since the Kinect motion capture camera is mounted
under the ceiling of the room, we currently have the
following problems.
1. This system is confined indoor. Kinect must be
placed on a place where it can monitor the robots
as well as the user. Therefore the system cannot
be used outdoors.
2. ARToolKit cannot recognize markers when a
robot leaves the scope of the Kinect. If Kinect is
about 3.0m or more away from a marker,
ARToolKit cannot detect the marker.
3. Kinect sometimes makes mistakes about the
gestures. Kinect recognizes that the user is
performing a gesture when a user raises the left
hand. Even if the user does not intend to do a
gesture, Kinect may misidentify that the user has
done a gesture.
In order to mitigate these problems, we are
extending the ARToolKit so that Kinect can
cognizes the users’ gestures more precisely as well
as looking for some other medium to capture the
scene in the open field.
REFERENCES
Abe, T., Takimoto, M. and Kambayashi, Y. (2011).
Searching Targets Using Mobile Agents in a Large
Scale Multi-robot Environment, Proceedings of the
Fifth KES International Conference on Agent and
Multi-Agent Systems: Technologies and Applications,
LNAI 6682, 221-220.
Azuma, R. (1997). Survey of Augmented Reality,
Presence: Teleoperators and Virtual Environments,
vol.6, no.4, 355-385.
Feiner, S., Maclintyre, B. and Seligmann, D. D. (1993).
Knowledge-Based Augmented Reality,
Communications of the ACM, vol. 36, no.7, 52-62.
Kambayashi, Y., Ugajin, M., Sato, O., Tsujimura, Y.,
Yamachi, H. and Takimoto, M. (2009). Integrating
Ant Colony Clustering Method to Multi-Robots Using
Mobile Agents, Industrial Engineering and
Management System, vol.8, no.3, 181-193.
Kato, H. (2002). ARToolKit: Library for Vision-based
Augmented Reality. IEIC Technical Report,vol.101,
no.652, 79‐86.
Microsoft Kinect Homepage (2012).
http://research.microsoft.com/en-us/um/redmond/
projects/kinectsdk/default.aspx.
Satoh, I. (1999). A Mobile Agent-Based Framework for
Active Networks, Proceedings of IEEE System Man
and Cybernetics Conference, 71-76.
Tomlinson, B., Yan, M. L., O’ Connell, J., Williams, K.,
Yamaoka, S. (2005). The Virtual Raft Project: A
Mobile Interface for Interacting with Communities of
Autonomous Characters, Proceedings of ACM
Conference on Human Factors in Computing Systems,
1148-1149.
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
442
