
Stereo-based Spatial and Temporal Feature Matching Method for
Object Tracking and Distance Estimation
Young-Chul Lim, Chung-Hee Lee and Jonghwan Kim
Daegu Gyeongbuk Institute of Science & Technology, 50-1 Sang-Ri, Hyeonpung-Myeon, Dalseong-Gun, Daegu, Korea
Keywords: Stereo Vision, Object Tracking, Distance Estimation, Feature Tracking, Feature Matching.
Abstract: In this paper, we propose a stereo-based object tracking and distance estimation method using spatial and
temporal feature matching scheme. Our work aims to track an object robustly and to estimate its distance
accurately without stereo matching processing, which requires a considerable amount of processing time
and numerous processing resources. Our method combines temporal feature matching and spatial feature
matching schemes. Our experimental results demonstrate that the proposed method can provide good object
tracking and distance estimation performance in real-world environments.
1 INTRODUCTION
Stereo-based detection and tracking methods have
been widely researched and applied in various fields
over the past few decades. Stereo vision system can
detect and track an object reliably while also
estimating the distance of the object accurately.
Generally, stereo matching processing is required to
obtain a 3D depth image from two rectified 2D
images. Stereo matching performs a process known
as brute-force corresponding searching, a complex
and time-consuming task. Moreover, this task is
vulnerable to the illumination difference between
left and right images, which often causes matching
errors under external environments. The erroneous
matching result results in poor detection and
tracking performance.
Feature-based object tracking attempts to find
corresponding features using a distinctive feature
extraction method such as Harris corner detection
(Harris and Stephens, 1988), scale-invariant feature
transform (SIFT) (Lowe, 2004), and speeded up
robust features (SURF) (Bay et al., 2008), and
features from accelerated segment test (FAST)
(Rosten et al., 2010). Feature-based object tracking
establishes these correspondences in consecutive
frames and estimates the transform matrix of the
feature pairs. The Kanade-Lucas-Tomasi (KLT)
feature tracker using Harris corner detection (Jianbo
and Tomasi, 1994) has been widely used in many
feature-based object tracking applications. The
method basically depends on the sum of squared
differences in the window. It often fails to track the
features during illumination changes. SIFT is robust
against rotation, translation, scaling, and
illumination changes. SURF can perform similarly
to SIFT while processing much faster. When these
feature detectors are used for feature tracking, the
interest points of the two images are matched by
descriptor comparisons. A descriptor is a vector with
a fixed size of its floating point values, which
represent the direction and magnitude of the gradient
around the key point. Therefore, these features need
much more time to extract the key points and to
match their descriptors compared to the KLT
method. Recently, the binary robust independent
elementary features (BRIEF) (Calonder et al., 2012)
method using binary strings as a feature descriptor
was proposed to reduce substantially the
computation amount while yielding higher matching
rates under certain restricted conditions.
Feature-based object tracking involves the
following procedure. The region of interest (ROI) of
the target object is located in the first frame, either
manually or automatically, using an object-specific
detector. The corresponding feature candidates of
the previous frame are estimated using the above-
mentioned feature extraction method. Transform
matrixes such as a homography matrix (eight
degrees of freedom (DOF)) or an affine matrix (6
DOF) are estimated using RANdom SAmple
Consensus (RANSAC) (Torr and Murray, 1997)
over the set of matching candidates to minimize
model estimation error due to the outlier feature
492
Lim Y., Lee C. and Kim J. (2013).
Stereo-based Spatial and Temporal Feature Matching Method for Object Tracking and Distance Estimation.
In Proceedings of the 2nd International Conference on Pattern Recognition Applications and Methods, pages 492-496
DOI: 10.5220/0004333904920496
Copyright
c
SciTePress

Figure 1: Block diagram of the proposed method.
pairs. However, if the number of outlier features
increases due to the misaligned ROI, the RANSAC
algorithm fails to estimate the model parameters
correctly.
Most feature-based object tracking methods were
used in the 2D image plane. In these methods,
projection errors may occur when the motion
parameters of the features are expressed by a
transform matrix. Feature tracking and feature
clustering in 3D are regarded as the similar problem
(Agrawal et al., 2005). In this paper, we propose an
object tracking method which uses an integrated
spatial and temporal feature matching scheme. The
proposed method offers enhanced tracking
performance by means of temporal feature matching
while accurately estimating the object distance by
means of spatial feature matching.
The rest of our paper is organized as follows. We
describe proposed method in Section 2. First, we
introduce an overview of our method and the spatial
and temporal feature matching method.
Experimental results and an analysis of real-world
image sequences are presented in Section 4. Finally,
Section 5 concludes this paper and discusses future
works.
2 THE PROPOSED METHOD
2.1 Overview of the Proposed Method
Our framework consists of temporal feature
extraction, temporal feature matching, outlier
rejection, ROI estimation, spatial feature extraction,
spatial feature matching, and distance estimation, as
shown in Figure 1. Before the spatial feature
matching process, calibration and rectification
processes are required to align the epipolar line.
Temporal features are extracted in the ROI of the
previous reference image and candidate region of the
current reference image using the FAST detector
(Rosten et al., 2010). The BRIEF method (Calonder
et al., 2012) is used as a descriptor of the FAST
features due to its speed and robustness. Temporal
features are matched by the Hungarian algorithm
(Kuhn, 1955). The outliers are removed, and the
transform matrix and ROI are estimated using the
prior disparity information of the features and the
RANSAC algorithm. Spatial features are extracted
in the search region of the current corresponding
image and then matched between left and right
features. The epipolar constraint and prior disparity
information reduce the spatial matching errors.
Finally, the 3D position of the tracking object is
calculated using an inverse perspective map (IPM)
(Lim et al., 2010).
2.2 Temporal and Spatial Feature
Matching
Temporal features are extracted in the search regions
of the current reference images using the FAST
detector. The search region (
T
t
) of temporal
features is determined by the motion model of the
target object (Figure 2).
1
,,
11 1
,,
, ,
,, ,, ,,
,, , ,
t
txtyt
TT T TTT
ttt ttv
TTTTTTTTT
tttttttutvt
TTTTTT
tttvvv
XXVtSS St
XS X uv V v v
SwhSss
(1)
T
t
X and
T
t
V respectively denote the center of the
search region and the velocity of the object’s motion,
and
T
t
S and
T
v
t
S likewise denote the scale (width and
height) of the search region and the variance of the
ROI size. Additionally,
t
is the frame rate. The
BRIEF descriptor is used to match the features of
reference and corresponding features. The
Hungarian algorithm is used for the globally optimal
one-to-one feature matching.
, 1 , 1
,
...
:::
...
,
...
:::
...
,
11
1
111
1
111
11
minarg
ˆ
n
i
m
j
ijij
nmn
m
nmn
m
n
j
m
i
ij
A
aa
aa
aa
A
cc
cc
C
ac
ij
A
(2)
In this equation, C is the cost matrix and A is the
assignment matrix, which should be mutually
exclusive. The cost matrix is calculated by the
Hamming distance between the descriptors of the
two features. A transform matrix is estimated using
matched feature pairs.
Stereo-basedSpatialandTemporalFeatureMatchingMethodforObjectTrackingandDistanceEstimation
493

Figure 2: Spatial and temporal matching method.
p
k
k
Rt
k
Rttt
W
ffW
tt
tt
W
1
2
,,11/
minarg
1/
1/
,
(3)
where
k
Rt
f
,1
and
k
Rt
f
,
are the k
th
matched features
in the previous and current reference images, and
1/ tt
W denotes the affine transform matrix. The
RANSAC algorithm and prior disparity information
are used to remove any outlier features and to
estimate the ROI more robustly.
Spatial features are extracted in the ROI region
of the current reference image and in the search
region of the current corresponding image. The
search region of the spatial features is determined in
a valid disparity range (
max,min,
,
tt
dd ) using the
predicted object distance (
t
z ) and velocity (
1
ˆ
t
z
v )
(Figure 2),
1
,min ,max
11
1
, ,
ˆ
ˆˆ
,
ˆ
t
tt
tz tz
tt z t
t
bb
d round d round
zz
b
zz vtz
d
(4)
where b and
are the baseline of the stereo camera
and the focal length expressed in pixel units, and
1
ˆ
t
d and
z
correspondingly represent the disparity
estimated in the previous images and the reliability
of the predicted distance. In spatial feature matching,
a 2D corresponding search problem can be reduced
to a 1D searching problem due to the epipolar
constraint.
,
11
2
,
,,
,
,,
minarg
ˆ
l
i
m
j
ji
xCt
t
ji
xRt
d
fdf
t
t
d
(5)
where
ji
xLt
f
,
,,
and
ji
xRt
f
,
,,
denote the horizontal position
of the matched feature of the i
th
row and the j
th
column in the reference and corresponding images.
(a) (b)
(c) (d)
Figure 3: Test datasets: (a) scene 1 (total 101 frames): size
change, (b) scene 2 (total 177 frames): illumination
change, (c) scene 3 (total 100 frames): partial occlusion
due to windshield, (d) scene 4 (total 200 frames): cluttered
environment.
Figure 4: Tracking error in scene 2 due to the severe
lighting condition.
The global position of the object in the current frame
is calculated by the following equation:
.
)sincos(
ˆ
00
yyyyy
d
yb
z
prpld
d
t
(6)
where
t
z
ˆ
is the longitudinal distance of the target
object, y
pl
is the vertical positions of the left image
coordinates, y
0
is the optical center,
is the angle
between the Z direction and the optical axe of the
cameras, α is the focal distance expressed in the
units of pixels.
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
494
4 EXPERIMENTAL RESULTS
We implement our method with visual C++ 9.0 and
the OPENCV 2.2 library. Our method is tested and
verified by test datasets which are captured from
Table 1: Experimental results.
Scene 1 Scene 2 Scene 3 Scene 4
# of Failure 0 5 0 0
Precision 0.726 0.683 0.803 0.855
Process time 483 ms 49.1 ms 153 ms 275 ms
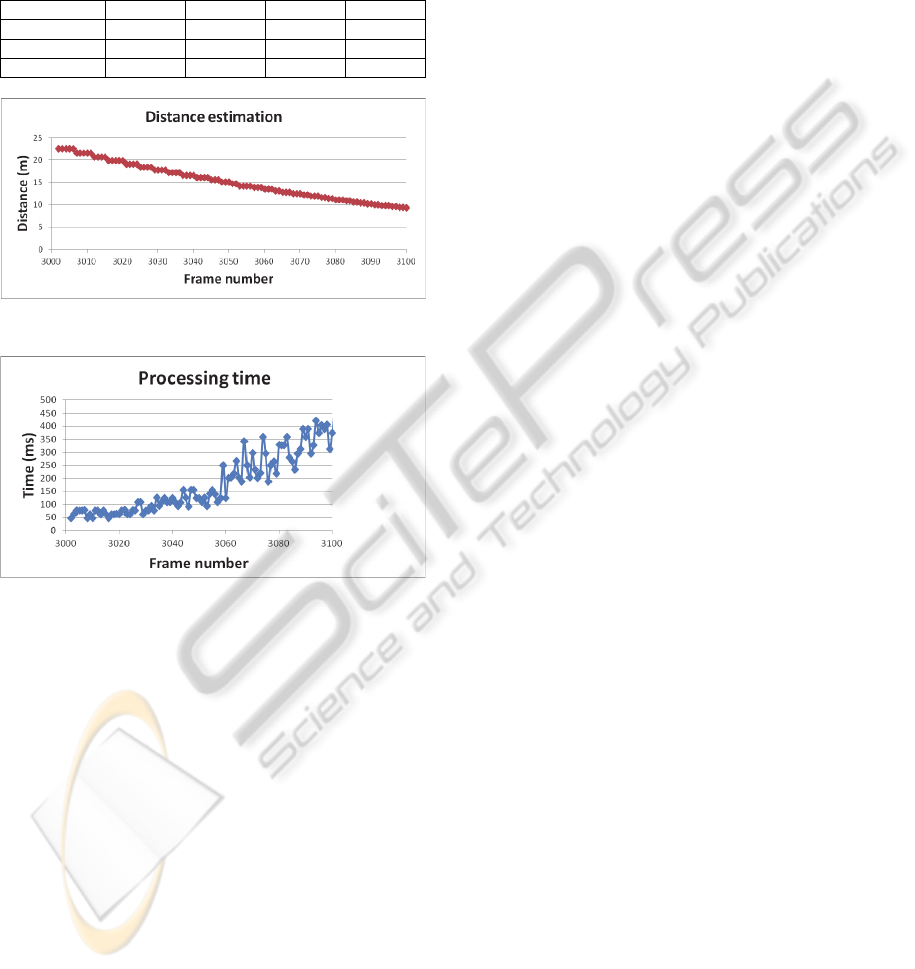
Figure 5: Distance estimation (scene 1).
Figure 6: Processing time (scene 1).
a few real and challenging road environments, as
shown in Figure 3. The moving vehicles are
manually initialized in the first frame, after which
the trackers estimate the ROI of the target object. If
a tracker fails to estimate the position of the target,
the errors are counted and the ROI is reinitialized by
the ground truth.
As shown in Table 1, the experimental results
demonstrate that our method demonstrates robust
tracking performance except in scene 2. In scene 2,
our method often fails to track objects in the tunnel
(Figure 4). Our method has a shortcoming under
severe lighting conditions. The processing times are
highly dependent of the number of features. The
distance estimation results and the processing time
for scene 1 are illustrated in Figure 5 and Figure 6,
respectively.
5 CONCLUSIONS
In this paper, we proposed a stereo-based spatial and
temporal matching method that can track an object
robustly and estimate its global position accurately
without dense stereo matching processing. Our
experimental results verified that the proposed
method is capable of accurately estimating distances
and robustly tracking objects. However, severe
illumination often causes tracking failures. In
addition, the processing time increases drastically if
the number of features increases. Our future work
will center on a more robust feature matching
algorithm and methods that reduce the processing
time.
ACKNOWLEDGEMENTS
This work was supported by the DGIST R&D
Program of the Ministry of Education, Science and
Technology of Korea.
REFERENCES
Agrawal, M., Konolige, K., and Iocchi, L., 2005. Real-
Time Detection of Independent Motion using Stereo.
in Proc. of IEEE Workshop on Motion and Video
Computing, Vol. 2, pp. 207-214.
Bay, H., Ess, A., Tuytelaars, T., and Gool, L. V., 2008.
SURF: speeded up robust features. Computer Vision
and Image Understanding, vol. 110, no. 3, pp. 346-359.
Calonder, M., Lepetit, V., Özuysal, M., Trzcinski, T.,
Strecha, C., and Fua, P., 2012. BRIEF: Computing a
Local Binary Descriptor Very Fast. IEEE Transactions
on Pattern Analysis and Machine Intelligence, vol. 34
no.7, pp. 1281-1298.
Harris, C. and Stephens, M., 1988. A combined corner and
edge detector. In Alvey Vision Conference, pp. 147-
151.
Lim, Y. C., Lee, Mh, Lee, C. - H., Kwon, S., and Lee, J.-
H., 2010. Improvement of stereo vision-based position
and velocity estimation and tracking using a stripe-
based disparity estimation and inverse perspective
map-based extended Kalman filter. Optics and Lasers
Engineering. vol. 48, no.9, pp. 859-868.
Jianbo, S. and Tomasi, C., 1994. Good features to track. In
Proc. of IEEE Computer Vision and Pattern
Recognition, pp. 593-600.
Kuhn, H. 1955. The Hungarian method for the assignment
problem. Naval Research Logistic, vol. 2, pp. 83-97.
Lowe, D. G., 2004. Distinctive Image Features from
Scale-Invariant Keypoints. International Journal of
Computer Vision, vol. 60, no. 2, pp. 91-110.
Rosten, E., Porter, R., and Drummond. T., 2010. Faster
Stereo-basedSpatialandTemporalFeatureMatchingMethodforObjectTrackingandDistanceEstimation
495

and Better: A Machine Learning Approach to Corner
Detection. IEEE Transactions on Pattern Analysis and
Machine Intelligence, vol. 32, no.1, pp. 105-119.
Torr, P. H. S. and Murray, D. W., 1997. The Development
and Comparison of Robust Methods for Estimating the
Fundamental Matrix. International Journal of
Computer Vision, vol. 24, no. 3, pp. 271-300.
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
496
