
Filtering Fringe Patterns
with the Extended Non Local Means Algorithm
Maciej Wielgus and Krzysztof Patorski
Institute of Micromechanics and Photonics, ul. Św. A. Boboli 8, 02-525 Warsaw, Poland
Keywords: Fringe Pattern Processing, Image Filtration, Non Local Means.
Abstract: The quality of interferometric measurements substantially benefits from the digital noise filtration.
Recently, robust non local filtration algorithms were introduced to optical metrology, the non local means
algorithm in particular. These methods allow to take advantage from the information redundancy spread in
the whole image domain for processing each pixel, constituting a powerful image denoising tool. We
evaluate how the denoising performance quality of the non local means algorithm can be further increased
by the introduction of geometrical transformations of the compared patches.
1 INTRODUCTION
Uncertainty is an intrinsic feature of every
measurement, appearing as noise in the measuring
system output. For fundamental reasons it is
impossible to fully remove its influence by hardware
setup modification. Instead of increasing the
hardware requirements most (if not all) systems for
interferometric measurements introduce some digital
noise filtration, applied to the registered pattern
before further processing. In many cases this is
a simple down-pass filtration by averaging with
binary or Gaussian mask. Median filter is a popular
choice as well. Dozens of more sophisticated
methods were proposed throughout the years.
One of the attractive novel developments in
image processing is the notion of the non local
filtration such as the non local means algorithm –
NLM (Buades et al., 2005). This group of methods
was recognized in the fringe pattern analysis just
recently. In (Wielgus and Patorski, 2012) basic
NLM algorithm was tested against several popular
filtration methods for interferometric pattern
filtration, while in (Fu and Zhang, 2012) modified
technique was proposed. The power of non local
methods lays in their ability of utilizing redundancy
in the whole image domain rather than in limited
neighbourhood of the considered pixel. Typically in
non local processing we compare patches (small
subimages containing the central pixel and its
neighbourhood) and average the intensities of their
central pixels based on established measure of patch
similarity. Unlike local averaging, the non local
method enables to avoid oversmoothing the image
and blurring its delicate features.
Robustness of non-local filtration for
photographic images, as shown in (Buades et al.,
2012), could be found as a surprising issue, as these
images do not represent any visible similarity of
distant patches. However, as noted in (Wielgus and
Patorski, 2012), situation is very different with
fringe patterns, which are quasiperiodic in nature
and therefore display similarity even between
significantly distant patches. To illustrate and
quantitatively evaluate this effect we calculate the
correlation of the fringe pattern presented in Figure
1 (a) with its chosen patch, located in the centre of
the image. This is a fragment of an experimentally
obtained interferogram of a silicone micromembrane
(Salbut et al., 2003). In Figure 1 (b) we show the
map of cross-correlation between the image and the
selected patch (brighter color = more similarity).
Note that it is a nonmonotonic function of distance
from the considered patch and that correlation
reaches high values even quite far away from the
chosen patch. This explains why non local methods
are supposed to fit particularly well for the fringe
pattern filtration. For the sake of clarity, only pixels
with normalized correlation larger than 0.3 are
shown.
In this paper we intend to exploit another
property of fringe patterns to further increase the
redundancy from which non local methods benefit,
52
Wielgus M. and Patorski K..
Filtering Fringe Patterns with the Extended Non Local Means Algorithm.
DOI: 10.5220/0004339500520055
In Proceedings of the International Conference on Photonics, Optics and Laser Technology (PHOTOPTICS-2013), pages 52-55
ISBN: 978-989-8565-44-0
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

namely the similarity under the geometrical
operations of symmetry and rotation. In Figure 1 (c)
correlation map for the very same patch as in
Figure 1 (a-b) is shown for the case of allowing the
comparison between rotated and mirrored patches.
Clearly, there are many more patches that can be
possibly used for the filtration and therefore more
redundancy can be utilized. It can be quantitatively
expressed in terms of the norm of correlation maps,
which is 2.18 times larger for the map of Figure 1(c)
than for the map presented in Figure 1 (b).
(a)
(b)
(c)
Figure 1: Fringe pattern with indicated chosen patch (a),
correlation map of the pattern and the patch (b),
correlation map of the pattern and the patch with
geometric transformations allowed (c).
2 NLM ALGORITHM
The non local means algorithm (Buades et al., 2005)
can be considered as a basic method for the non
local patch-based filtration. It estimates the value of
image intensity I
E
in pixel k as a weighted average
of intensities I in other pixels
(1)
where weights are specified based on similarities of
the corresponding patches P
k
and P
m
(2)
|| . ||
2
σ
denotes Gaussian-averaged Euclidean distance
between patches, h is the characteristic parameter of
the algorithm. Normalization factor N(k) is simply
(3)
The choice of the negative exponential function of
squared distance between patches is not unique, as
any smooth function monotonically decreasing for
positive arguments and reaching 0 at +∞ could be
used. It is important to emphasize that distance
between pixels have no influence on weights, which
is exactly what is meant by algorithm non-locality.
Nevertheless, in any useful implementation, patches
are compared only in certain regions limited by the
distance from considered patch. The only reason for
such limitation is the reduction of the computational
load.
3 GEOMETRIC
TRANSFORMATIONS
Proposed extension to the basic NLM algorithm lays
in consideration of not only similarities between
patches, but between mirrored and rotated patches as
well. Such an extension is very well motivated for
the fringe pattern filtration as cosine is not only
periodic, but also symmetric function as well since
orientation of fringes may strongly vary for different
pixel locations. In total, we consider 6 distinct
transformed patches I
(n)
(P
k
), n = 1, 2, ..., 6:
initial one,
3 rotations (90, 180 and 270 degrees),
2 symmetries (with respect to the horizontal and
vertical axis).
We calculate the weights similarly as in (2), only for
each pair of patches P
k
and P
m
we choose the best
weight from 6 transformations
(4)
In this manner we are capable of recognizing and
utilizing for denoising purposes the pixels that are
very similar but lay in the rotated (different fringe
orientation) or mirrored (different side of the fringe)
neighborhoods. Information gain was presented in
Figure 1.
FilteringFringePatternswiththeExtendedNonLocalMeansAlgorithm
53

4 NUMERICAL EXPERIMENTS
In the following experiment we compare filtration
results obtained by Gaussian smoothing, median
filtration, and more sophisticated anisotropic
diffusion filter based on (Tang et al., 2008), classic
NLM algorithm and finally our extended NLM
algorithm. We demonstrate the algorithm
performance on the synthetic pattern of vertical
fringes with slight phase distortion, spoiled with
additive white Gaussian noise (signal to noise ratio
smaller than 2), Figure 2 (b). Knowing the original
pattern (one without the noise, Figure 2 (a)), we are
able to quantitatively evaluate the denoising
performance in terms of the root mean square error
(the difference between fringe pattern without any
noise imposed and the filtration result), which is
summarized in the Table 1. We also include the full
processing error evaluation, which is the root mean
square error of the Fourier method based phase
calculation performed on the denoised image.
Table 1: Filtration quality evaluation for the synthetic
pattern.
Algorith
m
Denoising
RMSE
Noise
reduction
[%]
Phase
RMSE
No
filtration
64.20 0 50.42
median 34.64 46.0 26.10
Gaussian 28.84 55.1 19.82
Tang 23.20 63.9 17.95
NLM 20.16 68.6 16.23
Extended
NLM
18.57 71.1 15.48
The significant drawback of many simple filtration
algorithms is oversmoothing in the regions of
considerable fringe deformations or pattern
discontinuities, e.g., in the region of a sudden
change in the specimen height. In Fig. 4 we show
the denoising result of the extended NLM algorithm
for the case of synthetic data with fringe
discontinuity to indicate the algorithm satisfactory
behavior in such a region.
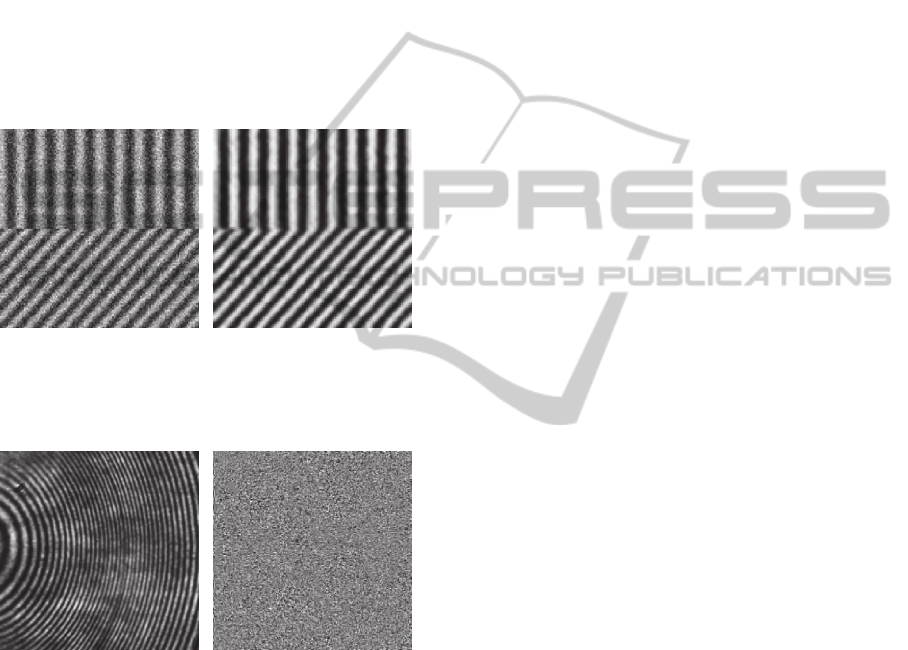
In Figure 4 the results of denoising the real
interferogram, shown in Fig. 1 (a), are presented.
Once again, high quality of the extended NLM
denoising is observable.
No fine tuning of the algorithms parameters was
done. The extended NLM method has shown
abilities to perform high quality fringe pattern
denoising.
(a)
(b)
(c)
(d)
(e) (f)
(g)
Figure 2: Synthetic interferogram (a), interferogram with
added noise (b), result of Gaussian denoising (c), median
filter denoising (d), (Tang et al., 2008) (e), the regular
NLM algorithm (f), and the extended NLM (g).
5 CONCLUSIONS
We showed how a simple extension of the non local
means algorithm, namely the consideration of
geometrically transformed patches, can increase the
fringe pattern filtration quality. The denoising
procedure quality have strong influence on the
performance of further processing, such as phase
PHOTOPTICS2013-InternationalConferenceonPhotonics,OpticsandLaserTechnology
54
decoding and therefore impacts on the quality and
sensitivity of the whole measurement process. One
could imagine extension of this method to any
arbitrary angle, which would vastly increase
redundancy in case of non-uniform, smoothly
varying fringe orientation angle. However, this
would as well further increase already rather high
numerical cost of computations. In fact, this seems
to be the main disadvantage and limitation of the
non-local filtration methods. The situation is
expected to change in the forthcoming years with
further growth of computer computational power as
well as with increasing popularity of computations
on parallel architecture, which is highly suitable for
the non local filtration implementations.
(a) (b)
Figure 3: Performance of the extended NLM method in
the fringe discontinuity region. The pattern (a) and the
denoising result (b).
(a) (b)
Figure 4: Denoised real interferogram (a) and difference
between the original and denoised images (b).
ACKNOWLEDGEMENTS
This research was supported by the fundings of the
Faculty of Mechatronics, Warsaw University of
Technology.
REFERENCES
Buades, A., Coll, B., Morel, J. M., 2005. A review of
image denoising algorithms, with a new one.
Multiscale Model. Simul. 4(2) 490-530.
Wielgus, M., Patorski, K., 2012. Non-local fringe image
filtration: a new interferometric data filtration
paradigm? Photonics Letters of Poland 4(2) 66-68.
Fu, S., Zhang, C., 2012. Fringe pattern denoising using
averaging based on non-local similarity. Optics
Communications 285 2541-2544.
Salbut, L., Patorski, K., Jozwik, M., Kacperski, J.,
Gorecki, C., Jacobelli, A., Dean, T., 2003. Active
micro-elements testing by interferometry using time-
average and quasi-stroboscopic techniques. Proc.
SPIE 5145, 23–32.
Tang, C., Han, L. Ren, H.., Zhou, D., Chang, Y., Wang.,
X., Cui, X., 2008. Second-order oriented partial-
differential equations for denoising in electronic-
speckle-pattern interferometry fringes. Optics Letters,
Vol. 33. No. 19, 2179-2181.
FilteringFringePatternswiththeExtendedNonLocalMeansAlgorithm
55
