
Automated Scenario Generation
Coupling Planning Techniques with Smart Objects
Gwen R. Ferdinandus
1
, Marieke Peeters
1,2
, Karel van den Bosch
2
and John-Jules Ch. Meyer
1
1
Information and Computing Sciences, Utrecht University, Utrecht, The Netherlands
2
Training & Performance Innovations, TNO, Soesterberg, The Netherlands
Keywords:
Automated Scenario Generation, Adaptive Educational Games, Serious Games, Scenario-based Training.
Abstract:
Serious games allow for adaptive and personalised forms of training; the nature and timing of learning ac-
tivities can be tailored to the trainee’s needs and interests. Autonomous game-based training requires for the
automatic selection of appropriate exercises for an individual trainee. This paper presents a framework for an
automated scenario generation system. The underlying notion is that a learning experience is defined by the
objects and agents that inhabit the training environment. Our system uses automated planning to assess the
behaviour required to achieve the (personalised) training objective. It then generates a scenario by selecting
semantically annotated (or ‘smart’) objects and by assigning goals to the virtual characters. The resulting
situations trigger the trainee to execute the desired behaviour. To test the framework, a prototype has been
developed to train the First Aid treatment of burns. Experienced instructors evaluated scenarios written by
three types of authors: the prototype, first-aid experts, and laymen. The prototype produced scenarios that
were at least as good as laymen scenarios. First-aid experts seemed the best scenario writers, although dif-
ferences were not significant. It is concluded that combining automated planning, smart objects, and virtual
agent behaviour, is a promising approach to automated scenario generation.
1 INTRODUCTION
Serious games have become increasingly popular as
educational tools. Advances in graphic and AI tech-
niques have provided us with virtual environments,
inhabited by believable characters, where the trainee
can practise the learning tasks autonomously. To en-
hance the effectiveness of these environments, serious
games incorporate features from efficacious training
forms (e.g. Peirce et al. (2008) and Peeters et al.
(2012). A training methodology that, because of its
story-like nature, lends itself especially well for this
prupose is Scenario-based Training (SBT). SBT pri-
marily concentrates on the type of exercises, i.e. con-
textualized, whole-task storylines, exemplifying the
learning-by-doing approach to training (Oser et al.,
1999; Salas et al., 2006). In SBT the trainee is con-
fronted with a representative sequence of events (the
scenario) within a simulated environment (e.g. the
game). Of course, most training methodologies also
recommend a certain ordering of learning tasks (Mer-
rill, 2002). However, the planning and ordering of
learning tasks is not the issue in the work presented
here.
The problem discussed in this paper is that once
such an ordering has been established, suitable exer-
cises need to be created to provide the trainee with
practice opportunities regarding the selected learn-
ing task. Since manual scenario creation is a time-
consuming process, most systems reuse a limited set
of scenarios linked to each learning task, however,
after several occasions, scenario repetitions becomes
inevitable. This is a problem for training directed
at skill maintenance, i.e. continued training. More-
over, to ensure effectiveness, the exercises (scenarios)
should be adapted to the individual needs and abil-
ities of the trainee, and offer him varied experiences
(Peeters et al., 2012). As such, the need for automated
scenario generation arises.
In this paper we propose an automated scenario
generation framework to produce training scenarios
that encompass a previously selected learning objec-
tive while warranting complete and coherent story-
lines. The next section first considers related work
on automated scenario generation. Section 3 then de-
tails the design, followed by the evaluation in Section
4. Finally, Section 5 discusses the implications of our
research and opportunities for future work.
76
R. Ferdinandus G., Peeters M., van den Bosch K. and Ch. Meyer J..
Automated Scenario Generation - Coupling Planning Techniques with Smart Objects.
DOI: 10.5220/0004354600760081
In Proceedings of the 5th International Conference on Computer Supported Education (CSEDU-2013), pages 76-81
ISBN: 978-989-8565-53-2
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

2 RELATED WORK
There is no generally accepted solution to scenario
generation, despite it being a growing subject of in-
terest. This section discarusses some existing ap-
proaches.
The two works discussed below focus on the cre-
ation of a game world that matches the intended learn-
ing task. Martin et al. (2009) propose to construct an
initial scenario based on the training task, which in
turn is extended by adding events to increase the com-
plexity level. The requirements on the game world
that follow from the resulting conceptual scenario are
addressed using a shape grammar. Lopes and Bidarra
(2011a) also focus on the realisation of the scenario
within the virtual world, arguing that the contents of
the game world determine the trainee’s experience.
They propose the use of Smart Objects (Kallmann and
Thalmann, 1998), which are annotated with the ser-
vices they offer to their surroundings, such as the ex-
periences they could offer a player. These annotations
can be used to steer the content selection process. Al-
though in both of these approaches content generation
sprouts from the initial learning objective, the lack of
an explicit task representation makes it difficult to in-
terpret the resulting training scenario within the con-
text of the training domain. It is also impossible to
derive the expected action plan for the trainee.
In contrast, Niehaus and Riedl (2009) employ au-
tomated planning techniques to construct a scenario
based on the trainee’s expected action sequence. By
adapting a default scenario plan, consisting of ordered
high level tasks, these action sequences can be ad-
justed to the needs and abilities of the trainee while
maintaining a coherent storyline . An important ad-
vantage of this approach is the possibility to track the
actions the trainee is required to perform to accom-
plish the learning task. Moreover, the action sequence
has been derived from an explicit representation of the
training domain, which promotes the interpretation of
the scenario with respect to the learning content.
The next two approaches select events to persuade
the trainee into performing the desired actions. Grois
et al. (1998) employ probabilistic networks to com-
pute a set of events likely to cause an opportunity for
practising the learning task. Zook et al. (2012) use a
basic set of events and, subsequently, use a genetic al-
gorithm to extend, mutate and improve the sequence
of events until an acceptable scenario has been gen-
erated. Both approaches offer interesting alternatives
(or additions) yet require very specific data such as
probability functions and quantitative scenario evalu-
ation functions, that are all but trivial to define. None
of the last three approaches discuss how the scenario
should be facilitated by the game world.
3 DESIGN
This section describes the Scenario Generator frame-
work. First, we consider the requirements for effec-
tive training scenarios that have driven the design pro-
cess. Then, the general design is presented, followed
by an explanation of the framework’s two main com-
ponents: the Action Planner, and the Object Selector.
3.1 Scenario Requirements
To understand which elements determine the effec-
tiveness of a training scenario we have gathered in-
formation from literature studies (Martin et al., 2009;
Issenberg et al., 2005; Peeters et al., 2012) and in-
terviews with experienced instructors from different
training domains (i.e. First Aid, In-Company Emer-
gency Assistance, and the Dutch Royal Navy). From
this research, we concluded that in order to be ef-
fective a training scenario must be 1) focused on the
learning objective, 2) adapted to the trainee’s com-
petency level, 3) representative of real life situations,
and 4) complete with respect to high level procedures.
The last requirement is illustrated by the following
example: a first-aid training exercise should not be
restricted to the treatment of the victim, but each ex-
ercise should also contain the preceding steps of se-
curing the environment and determining the problem,
since real life situations will never encompass merely
the treatment of the victim.
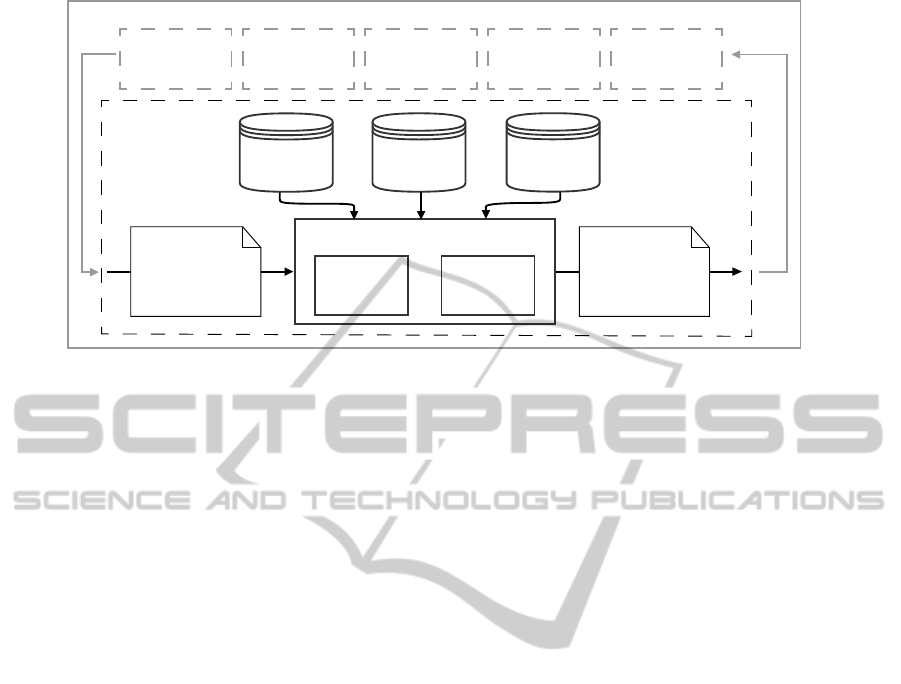
3.2 The Scenario Generator
The Scenario Generator has been designed to work
within the context of an agent-based Adaptive Edu-
cational Game (AEG). Figure 1 depicts the general
design of the Scenario Generator within the context
of the AEG. The system consists of two main parts:
an Action Planner and an Object Selector. The Ac-
tion Planner uses the learning task provided by the
AEG to generate a complete and coherent action plan
for the trainee (see Section 3.2.1). The resulting ac-
tion plan imposes requirements on the game world;
e.g. actions may require the presence of objects or co-
ordination with tasks performed by other characters
(agents). The Object Selector warrants that such re-
quirements are met by selecting the appropriate ob-
jects and agents (see Section 3.2.2).
The Scenario Generator requires the following in-
put from the AEG. 1) The learning task encompass-
ing the learning goal that the trainee is supposed to
AutomatedScenarioGeneration-CouplingPlanningTechniqueswithSmartObjects
77
Student
Model
Task
Model
World
Knowledge
Base
Adaptive Educational Game
Trainee actions,
Agent goals,
Smart objects
Action
Planner
Object
Selector
Scenario Generator
Learning task,
Diculty level,
Scenario template,
Setting
Learning
goal
selection
Learning task &
diculty level
selection
Performance
evaluation &
feedback
Student
model update
Scenario play
Figure 1: An overview of the Scenario Generator within the Adaptive Educational Game.
practise during the scenario (e.g. ‘treat burn’). 2) The
difficulty level at which the learning task should be
practiced. This level is defined as a value between
0 and 1, representing the skill level required to suc-
cessfully perform the learning task, where 0 indicates
no skill and 1 represents mastery. 3) The scenario
template: an ordered list of high-level tasks that con-
stitute a complete training exercise. 4) The setting,
identifying the desired contextual location of the sce-
nario (e.g. ‘the kitchen’). The setting is used to en-
sure authenticity and influences the object selection
process. Additionally, the Scenario Generator is as-
sumed to have access to a student model containing
the trainee’s current performance levels, a domain-
specific task model containing information about the
decomposition of learning tasks, and a world knowl-
edge base describing the available objects and agents
along with their domain-specific features.
The output of the Scenario Generator is a scenario
plan that contains all the information required by the
AEG. 1) Trainee Action Plan: a partially ordered list
of actions the trainee is expected to perform. 2) Agent
Goals: a list of high-level goals for the virtual agents
(e.g. ‘create fire’). 3) Smart Objects: a list of the re-
quired Smart Objects annotated with parameters that
influence the difficulty level at which they offer the
required services (i.e. interaction possibilities).
3.2.1 Action Planner
The Action Planner creates a coherent action se-
quence for the trainee that encompasses the learning
task, and constitutes a complete training exercise be-
cause of the scenario template used in the process. In
addition, the planner determines the goals for the vir-
tual agents (i.e. events) that are expected to trigger
this action sequence. Like Niehaus and Riedl (2009),
the action planner employs a hybrid HTN plan-space
planner. Such a planner employs domain-specific
knowledge to decompose abstract high-level tasks
into concrete actions meanwhile addressing open pre-
conditions by adding new actions and introducing
causal links between existing actions. The domain-
specific knowledge used by the HTN planner is stored
in the form of so-called methods. A method specifies
how a high-level task can be decomposed into sub-
tasks (see Ghallab et al. (2004) for a more formal def-
inition). For our particular purpose, we extend the
domain knowledge stored in an HTN method with
two components: preconditions in the form of ser-
vices that must be offered by the game world before
a method can be applied; and an indicator of the dif-
ficulty level of the method. An example of a precon-
dition would be that to decompose the task ‘remove
danger’ into ‘extinguish fire’ the service ‘fire’ must
first be offered. The difficulty level, a value between
0 and 1, allows the Action Planner to influence the dif-
ficulty of the scenario by comparing applicable meth-
ods in terms of complexity. For example, decompos-
ing the task ‘treat arm injury’ into ‘clean wound’ and
‘dress wound’ might be less complex than decompos-
ing the same task into ‘clean wound’, ‘dress wound’
and ‘apply splint’. The difficulty level is determined
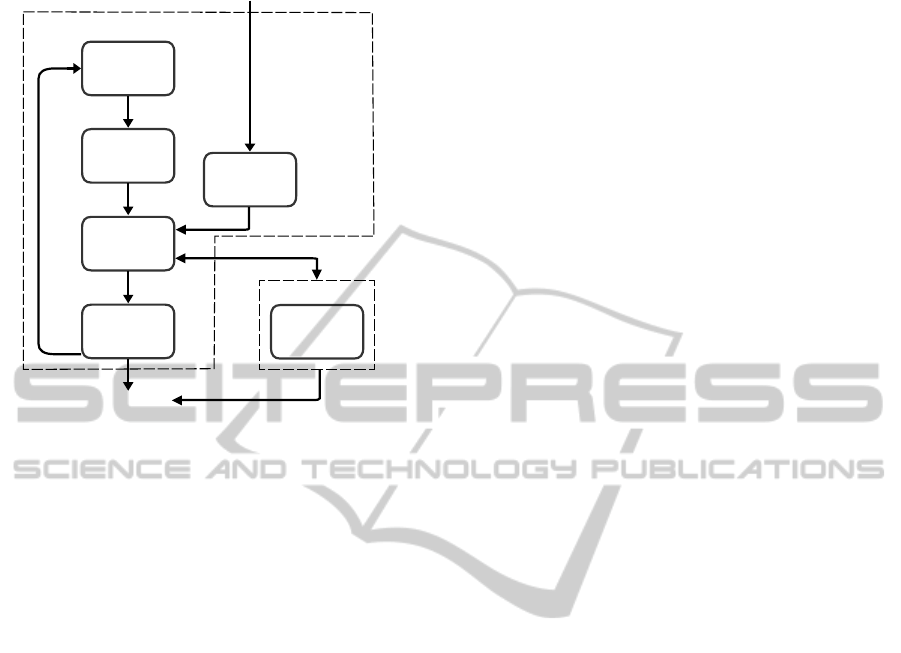
by domain experts. The following paragraphs will
continue the description of the action planner by de-
tailing the different steps of the scenario generation
process (also depicted in Figure 2).
Incorporate the Learning Task. To ensure a com-
plete training exercise, the scenarios need to contain
the learning task and follow the scenario template.
Therefore, the planner searches for (sequences of)
HTN methods that can be applied to decompose the
high-level task(s) from the scenario template into a
series of subtasks containing the learning task.
CSEDU2013-5thInternationalConferenceonComputerSupportedEducation
78
Select Task
Select Method
Establish
Preconditions
Apply
Decomposition
Method
Select Object
Object Selector
Action Planner
Learning Task &
Diculty Level
Scenario Plan
Incorporate
Learning Task
Figure 2: Flowchart depicting the planning process of the
Scenario Generator.
Select Task. Once the learning task has been intro-
duced in the planning, the system iteratively addresses
the remaining high-level tasks in the scenario tem-
plate. During this process the system randomly se-
lects the next task to work on in order to promote va-
riety between scenarios with the same input.
Select Method. Each selected task is decomposed
into actions by applying decomposition methods.
This process is guided by two considerations: the pre-
conditions already established by the game world so
far, and the difficulty level of the method. First, the
planner selects the methods with the highest number
of established preconditions thereby ensuring the co-
herence of the scenario. If there are multiple candi-
dates, the selection process is guided by the smallest
difference between the method’s difficulty level and
the desired difficulty level. If the task at hand is the
learning task, the desired difficulty level is received
from the AEG, otherwise the desired difficulty level
is retrieved from the student model. Any remaining
ties between methods are broken randomly.
Establish Preconditions. Before a method can be ap-
plied, all its preconditions (required services) must
be fulfilled. The Action Planner forwards the ser-
vice requests to the Object Selector. Sometimes a
service can only be offered after a certain goal has
been achieved, e.g. a ‘fire’ can only be offered after
it has been ignited. The Object Selector returns these
goals to the Action Planner which plans an action se-
quence for a virtual agent to achieve this goal. NB:
Although the action sequence is not relevant for the
output (the virtual agents require goals only), it must
be computed since the actions may in turn require new
services from the game world.
Apply Decomposition Method. The final step in the
process is to actually replace the high-level task with
the subtasks specified in the selected method. If these
subtasks are actions, the Action Planner also needs to
ensure any open preconditions of the actions.
3.2.2 Object Selector
The Object Selector is grants the service requests
posed by the Action Planner, by reasoning about the
services (i.e. interaction possibilities) the available
Smart Objects can offer, such as a match offering the
service ‘fire’. Agents are considered to be a special
kind of Smart Object that can offer more complicated
services. In addition, Smart Objects are annotated
with preconditions for their offered services, an in-
dication of their belonging in specific settings, and a
difficulty level. The preconditions can be other re-
quired services, or goals that should be achieved by
an agent. The difficulty level is based on three as-
pects: the complexity of its use, the obviousness of its
intended use for the service, and the adaptability of its
difficultylevel (i.e. a fire can be small and controllable
or a raging inferno). The Object Selector determines
the most appropriate object based on its belonging in
the provided scenario setting and its match to the de-
sired difficulty level. If the selected object requires
any other services, the Object Selector iteratively ful-
fils these requests; if the object requires the achieve-
ment of specific goals the Object Selector forwards
the request to the Action Planner.
4 EVALUATION
A (proof of concept) implementation of the scenario
generator was evaluated, be it with some additional
simplifications due to time and resource constraints.
The prototype employs a rudimentary HTN planner
(not an HTN plan-space planner); all service precon-
ditions are defined as actions (not goals), and there are
no ordering constraints on the actions of the agents.
These simplifications are of no great concern for the
current test setup, though should be addressed in fu-
ture implementations to fully exploit the advantages
of using autonomous agents. The prototype is devel-
oped for the training domain of First Aid, which has
the advantage that it requires no complex world rep-
resentations and has clearly defined procedures. To
further limit the size of the knowledge base the proto-
type was restricted to burn-related incidents.
AutomatedScenarioGeneration-CouplingPlanningTechniqueswithSmartObjects
79
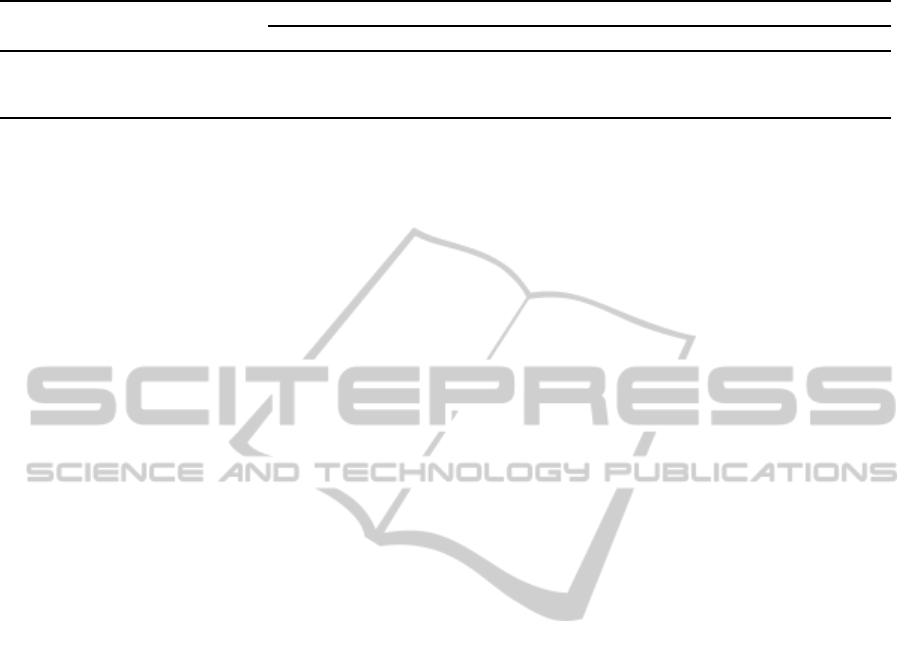
Table 1: Data exploration: mean scores (and standard deviations) over all raters.
Scenario Source
Dependent Variable
Expert Layman System
Overall
competency suitability
.867 (.448) -.061 (.431) .000 (.527) .269 (.413)
task suitability
1.933 (.290) .389 (.453) .800 (.534) 1.041 (.358)
authenticity
1.733 (.210) .450 (.400) .583 (.199) .922 (.167)
4.1 Method
Evaluators - oblivious of the research question -
rated scenarios written by the system, human ex-
perts and laymen in random order. The sce-
narios were evaluated on three of the require-
ments identified in Section 3.1: suitability for the
learning task (task suitability), suitability for the
trainee’s competency level (competency suitability),
and authenticity. Completeness of the exercise was
omitted, it being too hard to recognize by just the sce-
nario description (the trainee’s expected action plan
should be included). It was hypothesised that for all
dependent variables the experts would score best, fol-
lowed by the system followed by the laymen. The
setup was a within-subjects design; all evaluators
rated all scenarios from all sources.
Participants. The experiment used 5 evaluators (all
First Aid instructors), and 9 writers (5 First Aid in-
structors and 4 laymen).
Scenarios. The test set consisted of 36 scenarios: 12
scenarios for each source (experts, laymen, and sys-
tem). All authors wrote scenarios based on 3 features:
1) the learning task (i.e. treat burn, calm victim, or
ensure ABC), 2) the trainee’s competency level (i.e.
beginner or advanced), and 3) the setting (i.e. home,
restaurant, laboratory, or park). Counterbalancing
ruled out any possible effects resulting from these fea-
tures. The authors used a predefined format, consist-
ing of the background story (i.e. what happened), in-
structions for the ‘victim agent’, and a list of required
objects. The output of the system was not in natural
language and was manually rewritten following pre-
defined translation rules.
Questionnaires. Each page of the questionnaire
contained a scenario description followed by 3 7-
point Likert-scale questions. The task suitability
and competency suitability were measured indi-
rectly; the evaluators rated the suitability of the sce-
nario for a beginner and for an advanced trainee.
The highest of the two was used to represent the
task suitability. The score of the question matching
the intended difficulty level was used as a measure of
the competency suitability.
Procedure. In advance of the experiment proper and
after an extensive instruction, inter-rater reliability
was fostered by a joint discussion on 2 sets of 6 ex-
ample scenarios.
Results. Table 1 shows the means and standard
deviations of the test set. The results follow the
hypothesised trend with the experts scoring high-
est followed by the system followed by the lay-
men. The table also shows large standard devia-
tions, in particular for the system and layman sce-
narios. The intraclass correlation coefficient (ICC)
using the 2-way random model suggested substan-
tial agreement (r=0.732; p<.001). Any missing val-
ues (0.01% of the 540 values) were imputed using
the SPSS expectation-maximisation procedures (Lit-
tle and Rubin, 1989). A repeated measures ANOVA
revealed significant differences between the sources
for task suitability (F(2, 8) = 6.699; p = .020) and
authenticity (F(2, 8) = 6.220; p = .023), but not for
competency suitability (F(2, 8) = 3.529; p = .080).
Post-hoc tests using the Bonferroni correction proce-
dure revealed no significant differences between the
sources in one on one comparisons.
Discussion. The experiment revealed no significant
differences between the scenarios coming from dif-
ferent sources (i.e. experts, laymen, and system). One
possible explanation might have been the large stan-
dard deviations, which could havebeen caused by dis-
agreement among the evaluators, however, the ICC
analysis rules out that possibility. Several points for
discussion that may shed some light on these results
are discussed. First of all, the settings were purpose-
fully varied to show that the prototype is capable of
generating scenarios for various situations. However,
these settings may have forced the experts to write
scenarios for settings they normally would not use.
Secondly, the current template does not include the
unfolding of the scenario, nor the trainee’s expected
action sequence, thereby failing to reveal the source’s
intentions underlying the produced scenarios. The
evaluators may have used their experience to interpret
the scenario descriptions to infer these aspects, cover-
ing up any possible differences. A final point of atten-
tion is the importance of involving domain experts in
the development of the knowledge base: the task de-
compositions and the objects used. Even though the
used knowledge base contained accurate information,
the instructors indicated that it contained some con-
tent they would never use in their own scenarios, e.g.
electrical burns.
CSEDU2013-5thInternationalConferenceonComputerSupportedEducation
80

5 DISCUSSION & CONCLUSIONS
This paper addressed the issue of automated scenario
generation within the context of an Adaptive Educa-
tional Game (AEG). The proposed framework inte-
grates a hybrid HTN planner to plan the trainee’s ac-
tions with a content selection mechanism based on
Smart Objects to control the realisation of the sce-
nario within the game world. This results in a separa-
tion of the action plan construction - enabling the re-
trieval of the scenario’s underlying didactic intentions
- and the game world creation - enabling the use of
a separate smart objects database which is easily ex-
tended, in contrast to hard-coded objects in the plan-
ner itself. Although the evaluation experiment did
not provide significant results, the authors are hopeful
that further experimentation will provide more defini-
tive answers.
Several directions for further research can be sug-
gested. First of all, the experiment showed that some
of the desired functionalities of the system interfered
with its primary goal of producing scenarios with a
complexity level that fits the skill level of the trainee.
Since the prototype generated complete training exer-
cises, additional tasks were addressed in the scenario
on top of the learning task. Because a global diffi-
culty level was used, the trainee is expected to per-
form the additional tasks at the same difficulty level as
the learning task. This combination of multiple tasks
seemed too much to handle for the trainee. Two pos-
sible (and complimentary) solutions are the integra-
tion of a more fine-grained difficulty control system
such as for example a performance curve suggested
by Zook et al. (2012) and the introduction of ‘col-
league agents’ that take over part of the responsibili-
ties of the trainee. A second suggestion for further re-
search is the comparison of the different approaches
proposed for automated scenario generation. So far
it has been difficult to compare different approaches
since each system uses its own standards and criteria.
However, a comparison might be highly informative
and show the strengths and weaknesses of the differ-
ent approaches, possibly leading to hybrid solutions.
To conclude, the framework presented here is a
first step towards a system that can generate effective
and personalized scenarios automatically. In the fu-
ture, attaching the system to a game-based training
program will offer trainees extensive access to high-
quality training opportunities.
REFERENCES
Ghallab, M., Nau, D., and Traverso, P. (2004). Automated
Planning: Theory & Practice. Morgan Kaufmann
Publishers Inc., San Francisco, CA, USA.
Grois, E., Hsu, W. H., Voloshin, M., and Wilkins, D. C.
(1998). Bayesian network models for generation of
crisis management training scenarios. In Proc. IAAI-
98, volume 10, pages 1113–1120. AAAI.
Issenberg, S., McGaghie, W., Petrusa, E., Gordon, D., and
Scalese, R. (2005). Features and uses of high-fidelity
medical simulations that lead to effective learning: a
beme systematic review. Medical Teacher, 27(1):10–
28.
Kallmann, M. and Thalmann, D. (1998). Modeling objects
for interaction tasks. In Proc. Eurographics Workshop
on Animation and Simulation, volume 9, pages 73–86.
Citeseer.
Little, R. and Rubin, D. (1989). The analysis of social sci-
ence data with missing values. Sociological Methods
& Research, 18(2-3):292–326.
Lopes, R. and Bidarra, R. (2011). Adaptivity challenges
in games and simulations: A survey. IEEE Transac-
tions on Computational Intelligence and AI in Games,
3(2):85–99.
Martin, G., Schatz, S., Bowers, C., Hughes, C. E., Fowlkes,
J., and Nicholson, D. (2009). Automatic scenario
generation through procedural modeling for scenario-
based training. In Proc. HFES-09, volume 53, pages
1949–1953. SAGE Publications.
Merrill, M. D. (2002). First principles of instruction.
ETR&D, pages 43–59.
Niehaus, J. and Riedl, M. O. (2009). Scenario adaptation:
An approach to customizing computer-based training
games and simulations. In Proc. Workshop on Intelli-
gent Educational Games (AIED-09), volume 3, pages
89–98.
Oser, R. L., Cannon-Bowers, J. A., Salas, E., and
Dwyer, D. J. (1999). Enhancing Human Perfor-
mance in Technology-Rich Environments: Guide-
lines for Scenario-Based Training, volume 9 of
Human/Technology Interaction in Complex Systems,
pages 175–202. Jai Press Inc.
Peeters, M., Bosch, K., Meyer, J. J., and Neerincx, M.
(2012). Situated cognitive engineering: the require-
ments and design of directed scenario-based training.
In Proc. ACHI-12, volume 5, pages 266–272. XPS.
Peirce, N., Conlan, O., and Wade, V. (2008). Adaptive
educational games: Providing non-invasive person-
alised learning experiences. In Proc. DIGITEL-08,
volume 1, pages 28–35. IEEE.
Salas, E., Priest, H. A., Wilson, K. A., and Shawn Burke,
C. (2006). Scenario-Based Training: Improving Mili-
tary Mission Performance and Adaptability, volume 2
of Military Life: the psychology of serving in peace
and combat, chapter 3, pages 32–53. Praeger Security
International.
Zook, A., Urban, S. L., Riedl, M. O., Holden, H. K., Sotti-
lare, R. A., and Brawner, K. W. (2012). Automated
scenario generation: toward tailored and optimized
military training in virtual environments. In Proc.
FDG-12, volume 7, pages 164–171. ACM.
AutomatedScenarioGeneration-CouplingPlanningTechniqueswithSmartObjects
81
