
Artificial Neural Network based Methodologies
for the Spatial and Temporal Estimation of Air Temperature
Application in the Greater Area of Chania, Greece
Despina Deligiorgi
1
, Kostas Philippopoulos
1
and Georgios Kouroupetroglou
2
1
Division of Environmental Physics and Meteorology, Department of Physics, University of Athens, Athens, Greece
2
Division of Signal Processing and Communication, Department of Informatics and Telecommunications,
University of Athens, Athens, Greece
Keywords: Air Temperature Prediction, Artificial Neural Networks, Time-series Forecasting, Spatial Interpolation.
Abstract: Artificial Neural Networks (ANN) propose an alternative promising methodological approach to the
problem of time series assessment as well as point spatial interpolation of irregularly and gridded data.
ANNs can be used as function approximators to estimate both the time and spatial air temperature
distributions based on observational data. After reviewing the theoretical background as well as the relative
advantages and limitations of ANN methodologies applicable to the field of air temperature time series and
spatial modelling, this work focuses on implementation issues and on evaluating the accuracy of the AAN
methodologies using a set of metrics in the case of a specific region with complex terrain. A number of
alternative feed forward ANN topologies have been applied in order to assess the spatial and time series air
temperature prediction capabilities in different horizons. For the temporal forecasting of air temperature
ANNs were trained using the Levenberg-Marquardt back propagation algorithm with the optimum
architecture being the one that minimizes the Mean Absolute Error on the validation set. For the spatial
estimation of air temperature the Radial Basis Function and Multilayer Perceptrons non-linear Feed Forward
AANs schemes are compared. The underlying air temperature temporal and spatial variability is found to be
modeled efficiently by the ANNs.
1 INTRODUCTION
Air temperature measurements in high resolution
time series are available only at limited stations
because meteorological data are generally recorded
at specific locations and derived from different
meteorological stations with non-identical
characteristics. Spatial interpolation approaches
essentially transfer available information in the form
of data from a number of adjacent irregular sites to
the estimated sites. Thus, spatial interpolation
methods are frequently used to estimate values of air
temperature data in locations where they are not
measured. Various methods have been developed
with the purpose to compare the performance of
different traditional spatial interpolation methods for
air temperature data (Price et al., 2000); (Chai et al.
2011). Accurate ambient temperature estimates are
important not only in spatial but also in temporal
scales. Air temperature time series forecasting is one
of the most significant aspects in environmental
research and in climate impact studies. Time series
forecasts are valuable in renewable energy industry,
in agriculture for estimating potential hazards, and
within an urban context, in air quality studies for
assessing the risk of adverse health effects in the
general population.
During the last few decades, there has been a
substantial increase in the interest on Artificial
Neural Networks (ANN). ANNs have been
successfully adopted in solving complex problems in
many fields. Essentially, ANNs provide a
methodological approach in solving various types of
nonlinear problems that are difficult to deal with
using traditional techniques. Often, a geophysical
phenomenon exhibits temporal and spatial
variability, and is suffering by issues of nonlinearity,
conflicting spatial and temporal scale and
uncertainty in parameter estimation (Deligiorgi and
Philippopoulos, 2011). ANNs have been proved
(Deligiorgi et al., 2012) to be flexible models that
669
Deligiorgi D., Philippopoulos K. and Kouroupetroglou G..
Artificial Neural Network based Methodologies for the Spatial and Temporal Estimation of Air Temperature - Application in the Greater Area of Chania,
Greece.
DOI: 10.5220/0004373906690678
In Proceedings of the 2nd International Conference on Pattern Recognition Applications and Methods (PRG-2013), pages 669-678
ISBN: 978-989-8565-41-9
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

have the capability to learn the underlying
relationships between the inputs and outputs of a
process, without needing the explicit knowledge of
how these variables are related.
Recently, numerous applications of AANs to
estimate air temperature data have been presented,
e.g. in areas with sparse network of meteorological
stations (Snell et al., 2000); (Chronopoulos et al.,
2008) for the prediction of hourly (Tasadduq,
Rehman and Bubshait, 2002), daily (Dombayc and
Golcu, 2009) and year-round air temperature (Smith
et al., 2009) or room temperature (Mustafaraj et al.,
2011) as well as for simulating the Heat Island
(Mihalakakou et al., 2002).
In this work first we briefly present the
theoretical background of ANN methodologies
applicable to the field of air temperature time series
and spatial modeling. Next, we focus on
implementation issues and on evaluating the
accuracy of the aforementioned methodologies using
a set of metrics in the case of a specific region with
complex terrain at Chania, Crete Island, Greece. A
number of alternative Feed-forward ANN topologies
are applied in order to assess the spatial and time
series air temperature prediction capabilities in
different time horizons.
2 ANN PREDICTION MODELING
Artificial Neurons are Process Element (PE) that
attempt to simulate in a simplistic way the structure
and function of the real physical biological neurons.
A PE in its basic form can be modelled as non-liner
element that first sums its weighted inputs x
1
, x
2
, x
3
,
...x
n
(coming either from original data, or from the
output of other neurons in a neural network) and
then passes the result through an activation function
Ψ (or transfer function) according to the formula:
n
i
jjiii
wxy
1
(1)
where y
j
is the output of the artificial neuron, θ
j
is an
external threshold (or bias value) and w
ji
are the
weight of the respective input x
i
which determines
the strength of the connection from the previous
PE’s to the corresponding input of the current PE.
Depending on the application, various non-linear or
linear activation functions Ψ have been introduced
(Fausett, 1994); (Bishop, 1995) like the: signum
function (or hard limiter), sigmoid limiter, quadratic
function, saturation limiter, absolute value function,
Gaussian and hyperbolic tangent functions. Artificial
Neural Networks (ANN) are signal or information
processing systems constituted by an assembly of a
large number of simple Processing Elements, as they
have been described above. The PE of a ANN are
interconnected by direct links called connections and
cooperate to perform a Parallel Distributed
Processing in order to solve a specific computational
task, such as pattern classification, function
approximation, clustering (or categorization),
prediction (or forecasting or estimation),
optimization and control. One the main strength of
ANNs is their capability to adapt themselves by
modifying the interaction between their PE. An-
other important feature of ANNs is their ability to
automatically learn from a given set of
representative examples.
The architectures of ANNs can be classified into
two main topologies: a) Feed-forward multilayer
networks (FFANN) in which feedback connections
are not allowed and b) Feedback recurrent networks
(FBANN) in which loops exist. FFANNs are
characterized mainly as static and memory-less
systems that usually produce a response to an input
quickly (Jain et al., 1996). Most FFANNs can be
trained using a wide variety of efficient conventional
numerical methods. FBANNs are dynamic systems.
In some of them, each time an input is presented, the
ANN must iterate for a potentially long time before
it produces a response. Usually, they are more
difficult to train FBANNs compared to FFANNs.
FFANNs have been found to be very effective
and powerful in prediction, forecasting or estimation
problems (Zhang et al., 1998). Multilayer
perceptrons (MLPs) and radial basis function (RBF)
topologies are the two most commonly-used types of
FFANNs. Essentially, their main difference is the
way in which the hidden PEs combine values
coming from preceding layers: MLPs use inner
products, while RBF constitutes a multidimentional
function which depends on the distance
cxr
between the input vector x and the center c (where
denotes a vector norm) (Powell, 1987). As a
consequence, the training approaches between MLPs
and RBF based FFANN is not the same, although
most training methods for MLPs can also be applied
to RBF ANNs. In RBF FFANNs the connections of
the hidden layer are not weighted and the hidden
nodes are PEs with a RBF, however the output layer
performs simple weighted summation of its inputs,
like in the case of MLPs. One simple approach to
approximate a nonlinear function is to represent it as
a linear combination of a number of fixed nonlinear
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
670

RBFs
)(xz
i
, according to (2):
l
i
ii
wxzx
1
)(
(2)
Typical choices for RBFs
cxFz
i
are:
piecewise linear approximations, Gaussian function,
cubic approximation, multiquadratic function and
thin plate splines.
A MLP FFANN can have more than one hidden
layer. But theoretical research has shown that a
single hidden layer is sufficient in that kind of
topologies to approximate any complex nonlinear
function (Cybenco, 1989); (Hornik et al., 1989).
There are two main learning approaches in
ANNs: i) supervised, in which the correct results are
known and they are provided to the network during
the training process, so that the weights of the PEs
are adjusted in order its output to much the target
values and ii) unsupervised, in which the ANN
performs a kind of data compression, looking for
correlation patterns between them and by applying
clustering approaches. Moreover, hybrid learning
(i.e. a combination of the supervised and supervised
methodologies) has been applied in ANNs.
Numerous learning algorithms have been introduced
for the above learning approaches (Jain et al., 1996).
The introduction of the back propagation
learning algorithm (Rumelhart et al., 1986) to obtain
the weight of a multilayer MLP could be regarded as
one of the most significant breakthroughs for
training AANs. The objective of the training is to
minimize the training mean square error E
mse
of the
AAN output compared to the required output for all
the training patterns:
Yj
p
k
kji
p
k
kmse
dy
N
EE
1
2
1
2
1
(3)
where: E
k
is the partial network error, p is the
number of the available patterns and Y the set of the
output PEs. The new configuration in time t > 0 is
calculated as follows:
ji
jiji
w
E
kwkw
)1()(
(4)
)]2()1([ kwkw
jiji
To speed up the training process, the faster
Levenberg-Marquardt Back propagation Algorithm
has been introduced (Yu and Wilamowski, 2011). It
is fast and has stable convergence and it is suitable
for training AAN in small-and medium-sized
problems. The new configuration of the weights in
the k+1 step is calculated as follows:
)()()1(
1
kJIJJkwkw
TT
(5)
The Jacobian matrix for a single PS can be written
as follows:
01
0
11
1
1
www
www
J
p
n
pp
n
(6)
1
1
1
1
11
pp
n
n
xx
xx
where: w is the vector of the weights, w
0
is the bias
of the PE and ε is the error vector, i.e. the difference
between the actual and the required value of the
ANN output for the individual pattern. The
parameter λ is modified based on the development of
the error function E.
3 APPLICATION OF ANN IN AIR
TEMPERATURE ESTIMATION
The present work aims to quantify the ability of
ANNs to estimate and model the temporal and
spatial air temperature variability at a coastal
environment. We focus on implementation issues
and on evaluating the accuracy of the
aforementioned methodologies in the case of a
specific region with complex terrain. A number of
alternative ANN topologies are applied in order to
assess the spatial and time series air temperature
prediction capabilities in different time scales.
Moreover, this work presents an attempt to
develop an extensive model performance evaluation
procedure for the estimation of the air temperature
using ANNs. This procedure incorporates a variety
of correlation and difference statistical measures. In
detail, the correlation coefficient (R), the coefficient
ArtificialNeuralNetworkbasedMethodologiesfortheSpatialandTemporalEstimationofAirTemperature-Application
intheGreaterAreaofChania,Greece
671
of determination (R
2
), the mean bias error (MBE),
the mean absolute error (MAE), the root mean
square error (RMSE) and the index of agreement (d)
are calculated for the examined predictive schemes.
The formulation and the applicability of such
measures are extensively reported in (Fox, 1981);
(Willmott, 1982).
3.1 Area of Study
The study area is the Chania plain, located on the
northwestern part of the island of Crete in Greece.
The greater area is constricted by physical
boundaries, which are the White Mountains on the
south, the Aegean coastline on the northern and
eastern part and the Akrotiri peninsula at the
northeast of Chania city (Figure 1). The topography
of the region is complex due to the geophysical
features of the region. The influence of the island of
Crete on the wind field, especially during summer
months and days where northerly etesian winds
prevail, is proven to cause a leftward deflection and
an upstream deceleration of the wind vector
(Koletsis, 2009); (Koletsis et al., 2010); (Kotroni,
2001). Moreover, the wind direction of the local
field at the broader area of Chania city varies
significantly due to the different topographical
features (Deligiorgi et al., 2007).
In this study, mean hourly air temperature data
are obtained from a network of six meteorological
stations, namely Airport, Souda, Platanias, Malaxa,
Pedio Volis and TEI (Figure 1). The measurement
sites cover the topographical and land-use variability
of the region (Table 1). The climatological station at
the Airport is representative of the meteorological
conditions that prevail at the Akrotiri peninsula and
in this application it will be used as the reference
station for examining the performance of the
temporal and spatial pattern recognition approaches.
TEI, Souda and Malaxa stations are situated along
the perpendicular to the Aegean coastline north-
south axis of the Chania basin,, while the TEI and
Platanias stations are representative of the coastal
character of the basin. Moreover, TEI station is
located at the east and in close proximity to the
densely populated urban district of Chania city.
The topography induces significant spatial air
temperature variation. In detail, the inland stations at
Souda and at the Airport exhibit the highest diurnal
temperature ranges (7.75 °C and 6.56 °C
respectively), while the spatial minimum is observed
at Pedio Volis (2.32 °C), a finding that is attributed
to the effect of altitude and the proximity of the site
to the Aegean coastline. The highest daily maximum
temperature values, averaged over the experimental
period, are reported at the Airport (24 °C) and the
lowest at Malaxa (19.46 °C).
3.2 Spatial Estimation of Air
Temperature
3.2.1 Implementation
For the spatial estimation of air temperature the non-
linear Feed Forward Artificial Neural Networks
MLPANN and RBFANN are compared. The method
aims to estimate air temperature at a target station,
using air temperature observations as inputs from
adjacent control stations.
The target station is located at Airport, while the
concurrent air temperature observations from the
remaining sites - control stations (Souda, Malaxa,
Platanias, PedioVolis and TEI) are used as inputs in
the MLPANN and RBFANN models.
The study period is from 19 July 2004 to 31
August 2006 and due to missing observations the
input datasets consist of 12416 simultaneous
samples of hourly observations for each station. The
60% of the available data (7450 cases from 19 July
2004 at 23:00:00 to 1 Oct. 2005 at 09:00:00) was
used for building and training the models (training
set), the subsequent 20% as the validation set (2483
cases from 1 Oct. 2005 at 10:00:00 to 26 March
2006 at 11:00:00) and the remaining 20% (2483
cases from 26 March 2006 at 12:00:00 to 31 Aug.
2006 at 22:00:00) as the test set which is used to
examine the performance of both the RBFANN and
the MLPANN models. In MLPANNs the validation
Table 1: Geographical characteristics of the meteorological stations.
Station Name Latitude (°N) Longitude (°W) Elevation (m) Characterization
Airport 24° 07΄ 00΄΄ 35° 33΄ 00΄΄ 140 Rural
TEI 35° 31΄ 09΄΄ 24° 02΄ 33΄΄ 38 Suburban – Coastal
Souda 35° 30΄ 30΄΄ 23° 54΄ 40΄΄ 118 Suburban
Platanias 35° 29΄ 46΄΄ 24° 03΄ 00΄΄ 23 Rural – Coastal
Malaxa 35° 27΄ 57΄΄ 24° 02΄ 33΄΄ 556 Rural
Pedio Volis 35° 34΄ 11΄΄ 24° 10΄ 20΄΄ 422 Rural
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
672
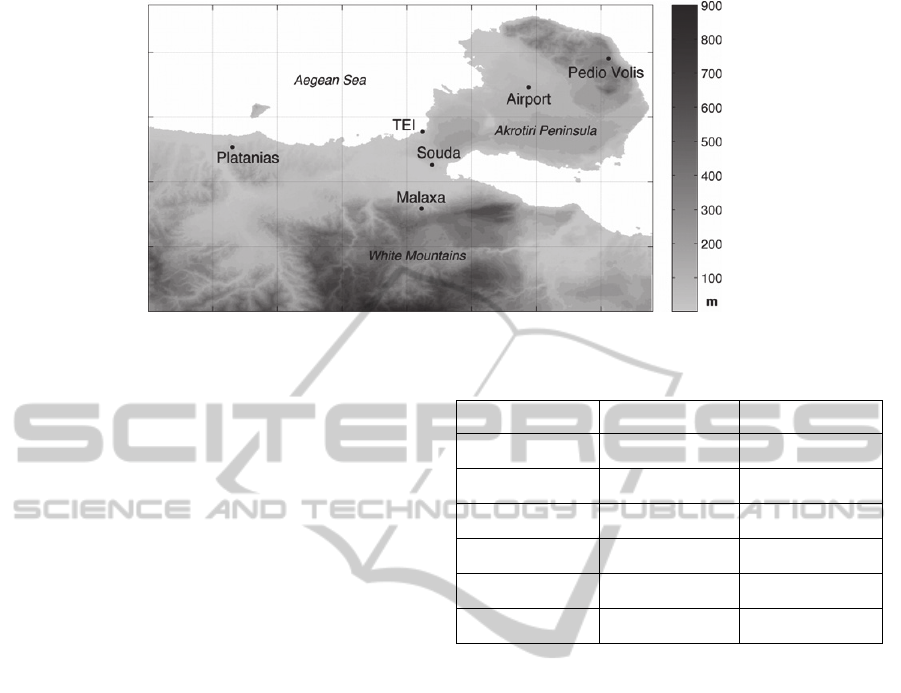
Figure 1: Area of study and location of meteorological stations.
set is used for early stopping and to determine the
optimum number of hidden layer neurons and in the
RBFANNs to determine the optimum value of the
spread parameter of the radial basis function. Large
spread values result into a smooth function
approximation that might not model the temperature
variability adequately, while small spread values can
lead to networks that might not generalize well. In
our case the validation set is used for selecting the
optimum value of the spread parameter, using the
trial and calculating the error procedure by
minimizing the MAE.
The optimum architecture for the MLPANN
model is 5-17-1 (5 inputs, 17 hidden layers and 1
output neuron). The RBFANN used had five inputs
and a radial basis hidden layer with 7450 artificial
neurons using Gaussian activation functions
radbas(n) = exp(-n
2
). The output layer had one PE
with linear activation function.
3.2.2 Results
The model evaluation statics for the Airport station
for both MLPANN and RBFANN approaches are
presented in Table 2. A general remark is that both
models give accurate air temperature estimates with
MAE values less than 0.9 °C and with very high d
values and minimal biases. Furthermore the
explained variance is 95.9% for the RBFANN model
and 96.3% for the MLPANN scheme. The metrics
indicate that MLPANN slightly outperforms the
trained RBFANN network.
The comparison of the observed and the
predicted air temperature values for both models are
presented in Figure 2 scatter plots and the respective
residuals’ distributions are given in Figure 3.
Limited data dispersion is observed for both models
and in both cases the residuals are symmetrically
distributed around 0 °C.
Table 2: ANN based model performance.
MLPANN RBFAAN
R
0.981
0.979
R
2
0.963
0.959
MBE (°C)
-0.008
0.034
MAE (°C)
0.819
0.871
RMSE (°C)
1.067
1.120
d
0.990
0.989
Moreover, a time series comparison between the
observed and the predicted air temperature form the
MLPANN and RBFANN models are presented in
Figure 4 for the period 10-23/8/2006. The predicted
air temperature time series follows closely the
observed values with no signs of systematic errors.
The temperature estimation errors are further
examined by calculating the MAE hourly values
(Figure 5). The analysis for both ANN models
reveals two maxima, which are observed during the
early morning warming period and during the late
afternoon temperature decrease. The increase in the
model errors can be attributed to the different
heating and cooling rates between stations, a
mechanism that is highly site specific and is greatly
influenced by the local topography. For the
remaining hours, both models are very accurate with
errors less than 0.7 °C, a fact, which indicates the
ability of the models to estimate in high accuracy the
maximum, minimum and diurnal temperature range
for the examined site.
ArtificialNeuralNetworkbasedMethodologiesfortheSpatialandTemporalEstimationofAirTemperature-Application
intheGreaterAreaofChania,Greece
673
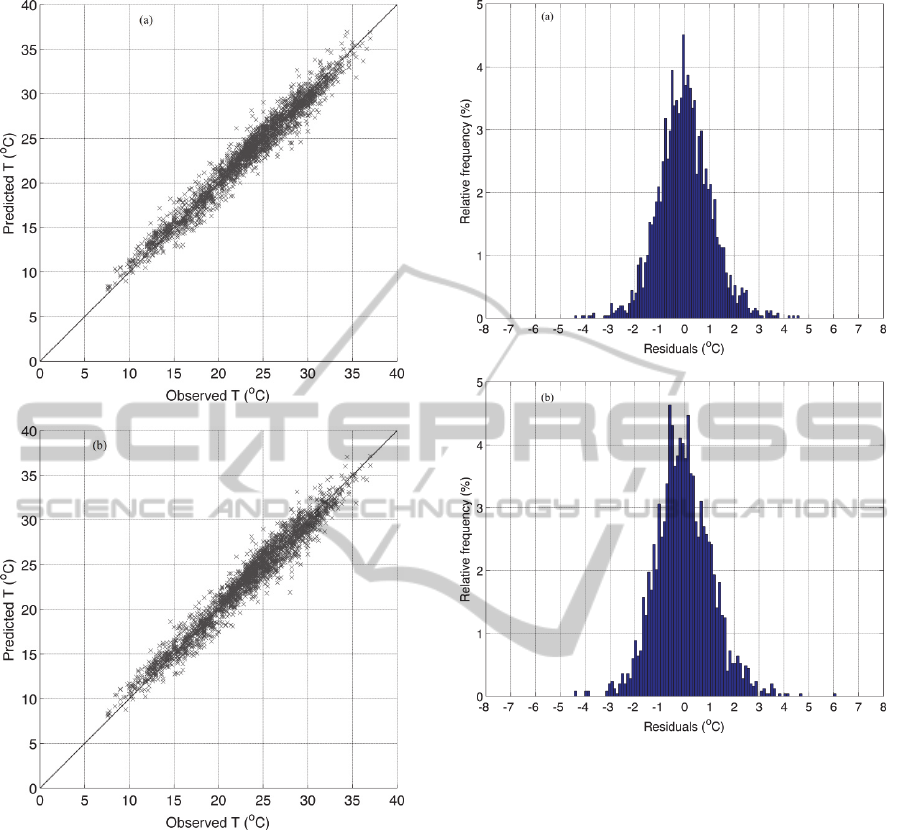
Figure 2: Comparison of the observed and predicted air
temperature values for the (a) MLPANN and (b)
RBFANN schemes.
3.3 Temporal Estimation of Air
Temperature
3.3.1 Implementation
For the temporal forecasting of air temperature
ANNs are used as function approximators aiming to
estimate the air temperature in a location using the
current and previous air temperature observations
from the same site.
In this application the Feed-Forward Artificial
Neural Network architecture with one hidden layer
is selected for predicting the air temperature time
series.
Figure 3: The residuals’ distribution for the (a) MLPANN
and the (b) RBFANN models.
Separate ANNs are trained and tested for predicting
the one hour (ANN-T1), two hours (ANN-T2) and
three hours (ANN-T3) ahead air temperature at
Airport station, based on the current and the five
previous air temperature observations from the same
site Therefore, the input in each ANN is the air
temperature at t, t-1, t-2, t-3, t-4 and t-5 and the
output is the air temperature at: t+1 for the ANN-T1,
t+2 for the ANN-T2 and t+3 for the ANN-T3.
The study period is from 19 July 2004 to 31
August 2006. In all cases, the first 60% of the
dataset is used for training the ANNs, the subsequent
20% for validation and the remaining 20% for
testing, as was described for the case of spatial
estimation of air temperature.
The optimum architecture (number of PEs in the
hidden layer) is related to the complexity of the
input and output mapping, along with the amount of
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
674
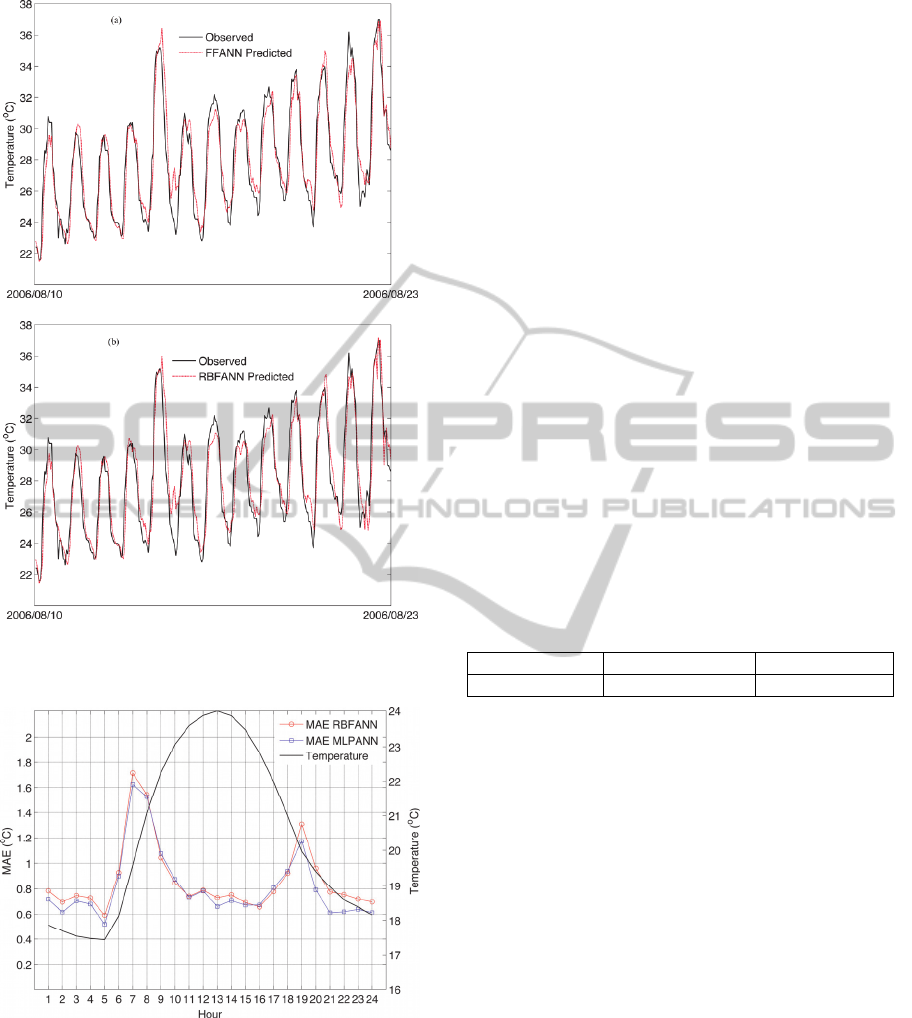
Figure 4: Comparison of the observed and predicted time
series for the (a) MLPANN and (b) RFBANN models.
Figure 5: Hourly MAE values and comparison with the
hourly temperature evolution and the Airport station.
noise and the size of the training data. A small
number of PEs result to a non-optimum estimation
of the input-output relationship, while too many PEs
result to overfitting and failure to generalize
(Gardner and Dorling, 1998). In this study the
selection of the number of PEs in the hidden layer is
based on a trial and error procedure and the
performance is measured using the validation set. In
each case, ANNs with a varying number from 5 to
25 PEs in the hidden layer were trained using the
Levenberg-Marquardt backpropagation algorithm
with the optimum architecture being the one that
minimizes the Mean Absolute Error (MAE) on the
validation set. A drawback of the backpropagation
algorithm is its sensitivity to initial weights. During
training, the algorithm can become trapped in local
minima of the error function, preventing it from
finding the optimum solution (Heaton, 2005). In this
study and for eliminating this weakness, each
network is trained multiple times (50 repetitions)
with different initial weights. A hyperbolic tangent
sigmoid transfer function tansig(n) = 2/(1+exp(-
2n))-1 was used as the activation function Ψ for the
PEs of the hidden layer. In the output layers, PEs
with a linear transfer function were used.
The optimum topologies of the selected ANNs
that minimized the MAE on the validation set are
presented in Table 3. In all cases, the architecture
includes six PEs in the input layer and one PE in the
output layer. The results indicate that the number of
the neurons in the hidden layer is increased as the
lag for forecasting the air temperature is increased.
Table 3: Optimum ANN architecture – number of PEs at
the input, hidden and output layer.
FFANN-T1 FFANN-T2 FFANN-T3
6 – 12 – 1 6 – 13 – 1 6 – 21 – 1
3.3.2 Results
The model evaluation statistics for the Airport
station are presented in Table 4 and the observed and
AAN based predicted air temperature values are
compared in the scatter plots of Figure 6. A general
remark is that the ANNs performance is decreased
with increasing the forecasting lag. In all cases the
MAE is less than 1.4 °C and the explained variance
decreases from 97.7% for the ANN-T1 to 88.7% for
the ANN-T3 model.
The ANN-T1 model exhibits very good
performance, as it is observed from the limited
dispersion along the optimum agreement line of the
one-hour air temperature (Figure 6a). The data
dispersion for the ANN-T2 (Figure 6b) and for the
ANN-T3 (Figure 6c) scatter plots is increased and a
small tendency of over-estimation of the low air
temperature values along with an under-estimation
of the high air temperature values is observed. This
finding is furthermore established from the increased
MBE for the ANN-T3 model
(°C).
ArtificialNeuralNetworkbasedMethodologiesfortheSpatialandTemporalEstimationofAirTemperature-Application
intheGreaterAreaofChania,Greece
675
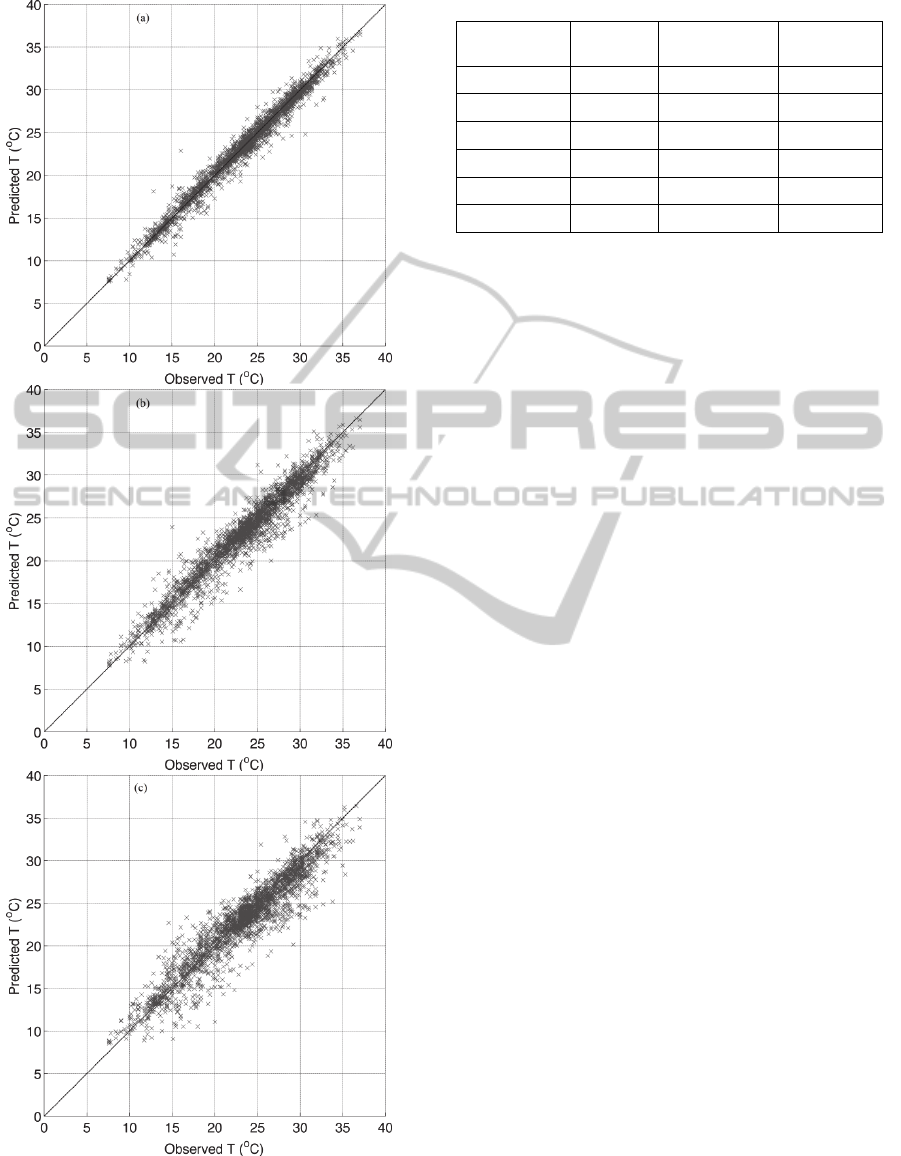
Figure 6: Comparison of the observed and ANN based
predicted air temperature values for the (a) one-hour, (b)
two-hour (b) and (c) three-hour ahead estimation.
Table 4: ANN based model performance.
FFANN
-T1
FFANN-T2
FFANN-
T3
R
0.988
0.967 0.942
R
2
0.977
0.935 0.887
MBE (°C)
-0.068
-0.225 -0.405
MAE (°C)
0.589
0.996 1.361
RMSE (°C)
0.844
1.427 1.904
d
0.994 0.983
0.968
Regarding the residuals distributions (Figure 7), the
errors for the ANN-T1 and for the ANN-T2 are
approximately centered at 0 °C, while for the ANN-
T3 model the maxima of the distribution is shifted to
negative residual values, a fact which is attributed to
the tendency of the ANN-T3 model to underestimate
the air temperature values.
4 CONCLUSIONS
The ability of neural networks to spatial estimate
and predict short term air temperature values is
studied extensively and is well established. We
reviewed the theoretical background and the relative
advantages and limitations of ANN methodologies
applicable to the field of air temperature time series
and spatial modeling. Then, we have applied ANNs
methodologies in the case of a specific region with
complex terrain at Chania coastal region, Crete
island, Greece. Details of the implementation issues
are given along with the set of metrics for evaluating
the accuracy of the methodology. A number of
alternatives feed-forward ANN topologies have been
applied in order to assess the spatial and time series
air temperature prediction capabilities. For the one
hour, two hours and three hours ahead air
temperature temporal forecasting at a specific site
ANNs were trained based on the current and the five
previous air temperature observations from the same
site using the Levenberg-Marquardt back-
propagation algorithm with the optimum architecture
being the one that minimizes the Mean Absolute
Error on the validation set. For the spatial estimation
of air temperature at a target site the non-linear
Radial Basis Function and Multilayer Perceptrons
non-linear Feed Forward AANs schemes were
compared. The underlying air temperature temporal
and spatial variability is found to be modeled
efficiently by the ANNs.
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
676
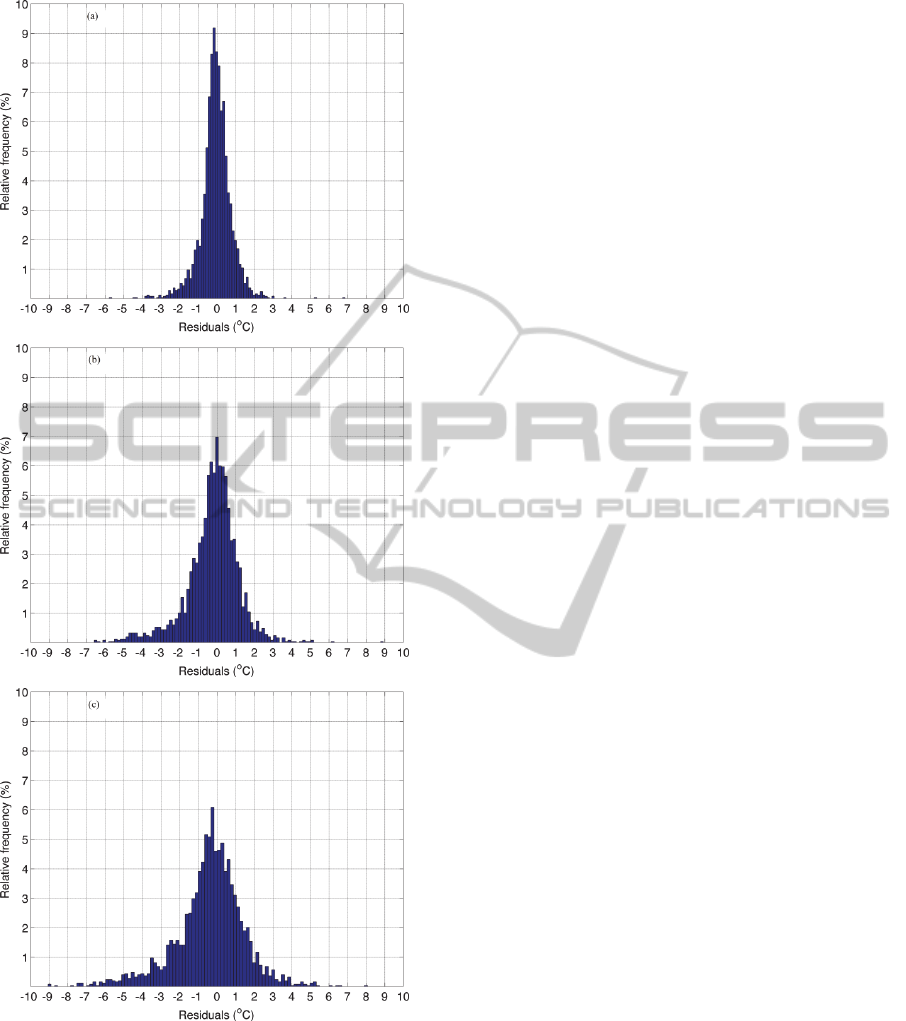
Figure 7: Comparison of the residuals distributions for the
(a) FFANN-T1, (b) FFANN-T2 and (c) FFANN-T3
models.
ACKNOWLEDGEMENTS
This research was partially funded by the University
of Athens Special Account for Research Grants.
REFERENCES
Bishop, C. M. (1995). Neural networks for pattern
recognition (1st ed.). Cambridge: Oxford University
Press.
Chai, H., Cheng, W., Zhou, C., Chen, X., Ma, X. & Zhao,
S. (2011). Analysis and comparison of spatial
interpolation methods for temperature data in Xinjiang
Uygur Autonomous Region, China. Natural Science,
3(12), 999-1010. doi:10.4236/ns.2011.312125.
Chronopoulos, K., Tsiros, I., Dimopoulos, I. & Alvertos,
N. (2008). An application of artificial neural network
models to estimate air temperature data in areas with
sparse network of meteorological stations. Journal of
Environmental Science and Health, Part A:
Toxic/Hazardous Substances and Environmental
Engineering, 43(14), 1752–1757. doi: 10.1080/
10934520802507621.
Cybenco, G. (1989). Approximation by superposition of a
sigmoidal function. Mathematics of Control Signals
and Systems, 2(4), 303–314. doi:
10.1007/BF02551274.
Deligiorgi, D., Kolokotsa, D., Papakostas, T., Mantou, E.
(2007). Analysis of the wind field at the broader area
of Chania, Crete. Proceedings of the 3rd
IASME/WSEAS International Conference on Energy,
Environment and Sustainable Development (pp 270-
275). Agios Nikolaos, Crete: World Scientific and
Engineering Academy and Society Press. Retrieved
from: http://www.wseas.us/e-
brary/conferences/2007creteeeesd/papers/562-194.pdf.
Deligiorgi, D., Philippopoulos, K. (2011). Spatial
Interpolation Methodologies in Urban Air Pollution
Modeling: Application for the Greater Area of
Metropolitan Athens, Greece. In F. Nejadkoorki (Ed.)
Advanced Air Pollution, Rijeka, Croatia: InTech
Publishers. doi: 10.5772/17734.
Deligiorgi, D., Philippopoulos, K., & Kouroupetroglou, G.
(2012, to appear). Artificial Neural Network based
methodologies for the estimation of wind speed. In F.
Cavallaro, F. (Ed.) Assesment and Simulation tools for
Sustainable energy Systems. Berlin: Springer.
Dombayc, O. & Golcu, M. (2009). Daily means ambient
temperature prediction using artificial neural network
method: A case study of Turkey. Renewable Energy,
34(3), 1158–1161. doi: 10.1016/j.renene.2008.07.007.
Fausett, L. V. (1994). Fundamentals neural networks:
architecture, algorithms, and applications. New
Jersey: Prentice-Hall, Inc.
Fox, D. G. (1981). Judging air quality model performance.
Bulletin of the American Meteorological Society,
62(5), 599–609. doi: 10.1175/1520-0477(1981)062<
0599:JAQMP>2.0.CO;2.
Gardner, M. W. & Dorling, S. R. (1998). Artificial neural
networks (the multilayer perceptron)-A review of
applications in the atmospheric sciences. Atmospheric
Environment, 32(14-15), 2627–2636. doi: 10.1016/
S1352-2310(97)00447-0.
Heaton, J. (2005). Introduction to Neural Networks with
Java. Chesterfield: Heaton Research Inc.
ArtificialNeuralNetworkbasedMethodologiesfortheSpatialandTemporalEstimationofAirTemperature-Application
intheGreaterAreaofChania,Greece
677

Hornik, K., Stinchcombe, M. & White, H. (1989).
Multilayer feedforward networks are universal
approximators. Neural Networks 2(5), 359–366. doi:
10.1016/0893-6080(89)90020-8.
Jain, A. K., Mao, J. & Mohiuddin, K. M. (1996). Artificial
neural networks: a tutorial. Computer 29(3), 31–44.
doi:10.1109/2.485891.
Koletsis, I., Lagouvardos, K., Kotroni, V. & Bartzokas,
A., (2009). The interaction of northern wind flow with
the complex topography of Crete island-Part 1:
Observational study. Natural Hazards and Earth
System Sciences, 9, 1845–1855. doi: 10.5194/nhess-9-
1845-2009.
Koletsis, I., Lagouvardos, K., Kotroni, V. & Bartzokas. A.
(2010). The interaction of northern wind flow with the
complex topography of Crete island-Part 2: Numerical
study. Natural Hazards and Earth System Sciences 10,
1115–1127. doi: 10.5194/nhess-10-1115-2010.
Kotroni, V., Lagouvardos, K. & Lalas, D. (2001). The
effect of the island of Crete on the etesian winds over
the Aegean sea. Quarterly Journal of the Royal
Meteorological Society 127(576), 1917–1937. doi:
10.1002/qj.49712757604.
Mihalakakou, G., Flocas, H., Santamouris, M. & Helmis,
C. (2002). Application of Neural Networks to the
Simulation of the Heat Island over Athens, Greece,
Using Synoptic Types as a Predictor. Journal of
Applied Meteorology, 41(5), 519-527. doi: 10.1175/
1520-0450(2002)041<0519:AONNTT>2.0.CO;2.
Mustafaraj, G., Lowry, G. & Chen, J. (2011). Prediction of
room temperature and relative humidity by
autoregressive linear and nonlinear neural network
models for an open office. Energy and Buildings,
43(6), 1452-1460. doi: 10.1016/j.enbuild.2011.02. 007
Powell, M. J. D. (1987). Radial basis functions for
multivariable interpolation: a review. Mason, J. C. &
Cox, M. G. (Eds) Algorithms for Approximation,
Oxford: Clarendon Press.
Price, D. T., McKenney, D. W., Nalder, I.A., Hutchinson,
M. F. & Kesteven, J. L. (2000). A comparison of two
statistical methods for spatial interpolation of
Canadian monthly mean climate data. Agricultural
and Forest Meteorology, 101(2-3), 81-94.
doi:10.1016/S0168-1923(99)00169-0.
Rumelhart, D. E., Hinton, G. E. & Williams, R. J. (1986).
Learning representations by back-propagating errors.
Nature 323, 533–536. doi: 10.1038/323533a0
Smith, B., Hoogenboom, G. & McClendon, R. (2009).
Artificial neural networks for automated year-round
temperature prediction. Computers and Electronics in
Agriculture 68(1), 52–61. doi: 10.1016/j.compag.
2009.04.003.
Snell, S., Gopal, S. & Kaufmann, R. (2000). Spatial
Interpolation of Surface Air Temperatures Using
Artificial Neural Networks: Evaluating Their Use for
Downscaling GCMs. Journal of Climate, 13(5), 886-
895. doi: 0.1175/1520-0442(2000)013<0886: SIOSAT
>2.0.CO;2.
Tasadduq, I., Rehman, S. & Bubshait, K. (2002).
Application of neural networks for the prediction of
hourly mean surface temperatures in Saudi Arabia.
Renewable Energy, 25(4), 545–554. doi: 10.1016/
S0960 -1481(01)00082-9.
Willmott, C. J. (1982). Some comments on the evaluation
of model performance. Bulletin American
Meteorological Society, 63(11), 1309–1313. doi: 10.
1175/1520-0477(1982)063<1309:SCOTEO>
2.0.CO;2.
Yu, H. & Wilamowski, B. M. (2011). Levenberg–
Marquardt training. Wilamowski, B.M. & Irwin, J.D.
(Eds) Industrial Electronics Handbook (2nd ed.). Boca
Raton: CRC Press.
Zhang, G. P., Patuwo, E. & Hu, M. (1998). Forecasting
with artificial neural networks: the state of the art.
International Journal of Forecasting, 14(1), 35–62.
doi: 10.1016/S0169-2070(97)00044-7.
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
678
