
A Low Overhead Self-adaptation Technique for KPN Applications
on NoC-based MPSoCs
Onur Derin
1
, Prasanth Kuncheerath Ramankutty
1
, Paolo Meloni
2
and Giuseppe Tuveri
2
1
ALaRI - Faculty of Informatics, University of Lugano, Via G. Buffi 13, 6904 Lugano, Switzerland
2
DIEE - Faculty of Engineering, University of Cagliari, 09123 Cagliari, Italy
Keywords:
Kahn Process Networks, Networks-on-Chip, Self-adaptation, Event-based Control.
Abstract:
Self-adaptive systems are able to adapt themselves to mutating internal/external conditions so as to meet
their goals. One of the challenges to be tackled when designing such systems is the overhead introduced
in making the system monitorable and adaptable. A large overhead can easily compensate the benefits of
adaptation. In this work, we are addressing this challenge within the context of KPN applications on NoC-
based MPSoCs. In particular, parametric adaptations at the application level are considered. We present a low
overhead technique for the implementation of the monitor-controller-adapter loop, which is present in self-
adaptive systems. The technique is fundamentally based on an extended network interface which provides the
ability to interrupt remote tiles on a NoC-based multiprocessor platform. Results from the MJPEG case study
show that the proposed interrupt-based approach incurs an overhead as low as 0.4% without compromising
the quality of the adaptation control. Our new technique provides an improvement of approximately 6.25%
compared to another state-of-the-art technique that interacts with the application using KPN semantics (i.e.,
blocking channels). Moreover, the sensitivity of the overhead to the complexity of the adaptation controller is
much lower in case of our interrupt-based technique as compared to the blocking channel based scheme.
1 INTRODUCTION
There has been a paradigm shift in the design of pro-
cessors in order to achieve scalable performances by
moderately increasing the power consumption. Pro-
cessors are being integrated on the same chip with
ever-increasing numbers alongside a network-on-chip
(NoC) (Micheli and Benini, 2006) as the communica-
tion backbone. Memory organization and program-
ming models are also affected by these changes. No
remote memory access (NORMA) and message pass-
ing models allow scalability on such platforms.
As systems become more complex, modeling their
behavior and analyzing their performances become
more challenging. Offline analysis may prove to be
more difficult or impossible. Even if possible, chang-
ing internal or external conditions may turn the opti-
mal configuration chosen at design time into a non-
optimal one. Self-adaptivity has emerged as a solu-
tion to these issues. Self-adaptivity is the ability of a
system to adapt itself dynamically to changing inter-
nal and external conditions. It allows systems to meet
their non-functional goals such as high performance,
high dependability and low power consumption.
An important challenge in designing self-adaptive
systems is the implementation of monitoring and
adaptation capabilities with low overheads. There
are two types of overhead. The steady state over-
head is the overhead experienced simply due to the
additional hardware or software for enabling moni-
toring and adaptation capabilities. It is present even
when there are no ongoing adaptations. This overhead
should be minimized because it has to be afforded at
all times. The transient overhead is the overhead ex-
perienced while an adaptation is taking place. The
major sources of this overhead are the adaptation con-
trol logic and the realization of an adaptation. If the
system is expected to have frequent adaptations, then
care must be taken to minimize this type of overhead.
The techniques to be developed for implement-
ing self-adaptive applications depend heavily on the
adopted model of computation. In this paper, we
adopt Kahn Process Networks (KPN) (Kahn, 1974)
model due to its suitability for NORMA-based NoC
multiprocessor systems-on-chip (MPSoCs). KPN is
a stream-oriented computation model, where an ap-
plication is organized as streams and computational
blocks; streams represent the flow of data, while com-
262
Derin O., Kuncheerath Ramankutty P., Meloni P. and Tuveri G..
A Low Overhead Self-adaptation Technique for KPN Applications on NoC-based MPSoCs.
DOI: 10.5220/0004389802620269
In Proceedings of the 3rd International Conference on Pervasive Embedded Computing and Communication Systems (SANES-2013), pages 262-269
ISBN: 978-989-8565-43-3
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

putational blocks represent operations on a stream of
data, making it a suitable computation model to rep-
resent most of the signal processing and multimedia
applications of the embedded systems world.
The particular focus of this paper is the self-
adaptivity overhead in the context of streaming ap-
plications based on the KPN model and running on
NORMA-based NoC multiprocessors. The main con-
tribution of this work is a low overhead technique for
the implementation of the monitor-controller-adapter
(MCA) loop based on an extension in the Network In-
terface (NI) which allows interrupting remote tiles on
the NoC platform. In doing so, the realization of self-
adaptation is investigated with regard to two interac-
tion styles between the MCA and the application. Ex-
perimental results are provided comparing these ap-
proaches.
The rest of the paper is organized as follows. An
overview of the related work is provided in Section 2.
Section 3 describes the NoC-based platform and inter-
processor interrupt support. Section 4 presents the
proposed interrupt-based self-adaptation technique.
Section 5 explains shortly the MJPEG case study, fol-
lowed by the experimental results in section 6. Fi-
nally, section 7 concludes the paper.
2 RELATED WORK
Run-time management on MPSoC platforms have
gained an increasing attention in the recent years. It
can be used for various purposes such as management
of quality of service, power, temperature, variability
as well as load balancing and fault tolerance. (Nollet
et al., 2010) surveys several works from the academia
and the industry that address different aspects of run-
time adaptation. In terms of their classification cri-
teria, our work can be classified as quality manage-
ment since we address application-level performance
goals. It can be incorporated into the generic self-
adaptive run-time environments proposed in (Nollet
et al., 2010; Derin et al., 2009) and reside alongside
other self-adaptation services such as fault-tolerance
(Meloni et al., 2012).
Some emerging NoC-based multi-core architec-
tures provide inter-processor interrupt (IPI) support.
For example, Tilera’s Tile64 can deliver interrupts to
notify user-space processes of message arrival (Went-
zlaff et al., 2007). This allows it to support both
polling and interrupt-based message delivery. In-
tel’s SCC also provides a hardware message passing
mechanism that triggers an interrupt on the receiv-
ing core, before returning from a write() call (Matt-
son et al., 2010). The OpenScale platform (Busseuil
et al., 2011), which is quite similar to the presented
NoC-based MPSoC, can handle packet reception by
both interrupt and polling methods; the interrupt oc-
curs when the number of elements inside the incom-
ing FIFO reaches a given threshold. Anyway, to the
best of our knowledge there are no works evaluating
the impact of the use of interrupts on the overhead
related to the self-adaptivity of the system.
The self-adaptation framework presented in (De-
rin et al., 2012) (hereafter referred to as MCA-EB,
short for event-based MCA using blocking channels)
uses blocking FIFO channels for the interaction be-
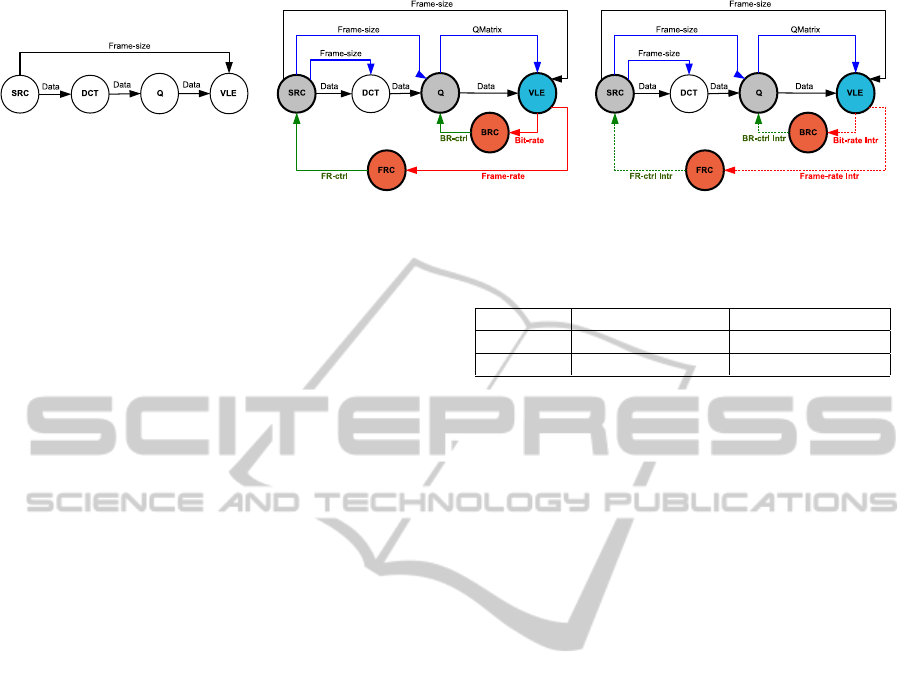
tween MCA and the application tasks. Fig. 1(a)
and Fig. 1(b) shows a simple KPN application and
its self-adaptive version based on this framework re-
spectively. MCA-EB represents a self-adaptive ap-
plication in terms of the following entities: adap-
tive tasks implementing adapter functions, monitoring
tasks calling monitoring functions, adaptation con-
troller(s) and adaptation propagation channels (APC)
alongside the original task graph. MCA-EB deploys
event-driven control (Sandee, 2006), where the mon-
itor and control actions are triggered upon the gener-
ation of a specific application event. Such an event
causes the monitoring task to measure the required
application parameter and sent it to the controller task
using the monitor channel (MC). The controller task
reads this data from the blocking channel, runs the
control algorithm to generate the control command
and sends it to the adaptive task using the control
channel (CC). Adaptive task reads these commands
from the blocking channel (at a predefined place in
the code) and performs the adaptation.
Self-adaptive applications built using MCA-EB
approach suffer from reduced throughput due to
pipeline stalls caused by the blocking-channel inter-
action between the application tasks and the con-
troller. That is, for every event that triggers the adap-
tation control, the adaptive tasks in the application
pipeline have to wait for the control algorithm to fin-
ish, thus preventing the processing of subsequent in-
put data by them. This causes the pipeline to be emp-
tied and filled often, thus reducing the throughput.
In P
3
N (Zhai et al., 2011), a parameterized poly-
hedral process network model is defined to support
run-time parametric adaptations. P
3
N allows analyz-
ing where and how parameter values can be changed
dynamically and consistently according to depen-
dence relations between parameters. It also enables
extracting the dependence relation between depen-
dent parameters at design time. As explained later, in
our approach, the identification of the adaptation ex-
ecution points and adaptation propagation channels is
to be done manually by the application programmer.
ALowOverheadSelf-adaptationTechniqueforKPNApplicationsonNoC-basedMPSoCs
263

3 INTER-PROCESSOR
INTERRUPT SUPPORT IN NoCs
The platform proposed in (Meloni et al., 2012) is
adopted as the hardware base for this work. In the pro-
posed approach the system architecture can be seen as
a network of tiles, interconnected by means of a NoC
communication infrastructure.
The communication network is built by using an
extended version of the the ×pipes-lite library of syn-
thesizable components (Bertozzi and Benini, 2004).
Network Interfaces (NI) are in charge of construct-
ing the packets on the basis of the communication
transactions requested by the cores. NIs have been
extended with support for message-passing commu-
nication model. A programmable message manager
with DMA capabilities is integrated with the NI inside
a module called Network Adapter (NA). Communi-
cation and synchronization mechanisms are managed
accessing memory-mapped registers at the network
interfaces.
3.1 Programming Model
Reference primitives implementing message-passing
communication are built, according to the general
definition of such model, upon two base functions:
send() and receive(). These two primitives are imple-
mented in C, and interact with memory mapped reg-
isters inside the NA. According to the usual message-
passing signatures, to send a message with a send(),
the programmer has to specify the address (SendAd-
dress hereafter) inside the private memory that con-
tains the information to be sent (message data), a tag
assigned to the message (SendTag), the size of the
transfer (SendDim), and the ID of the destination pro-
cessor (SendID). The receive() parameters are the tag
of the expected message (ReceiveTag), the sender ID
(ReceiveID) and the address where the received mes-
sage data has to be stored (ReceiveAddress). Two
implementations of the receive() are provided, with
blocking and non-blocking behavior.
3.2 Message Passing Support
The Network Adapter architecture is connected to
dual port data and instruction private memories, in or-
der to allow the processor to continue with the execu-
tion while the other ports are used to load/store data
from/to the memory in case of message send/receive.
The NA integrates a module called DMA message-
passing handler (MPH), embedding the memory-
mapped registers to be programmed by the processor,
when controlling send and receive operations, to set
the needed primitive parameters.
It also includes an address generator in charge of
generating the addresses when the private memories
must be accessed from the port reserved for message
passing.
When the processor wants to call a send(), the mi-
crocode that implements the primitive stores the val-
ues of primitive parameters into a set of send-related
memory-mapped registers. As soon as the registers
are programmed, the address generator starts to load
SendDim words from the memory, starting from ad-
dress SendAddr, and propagates them to the NA of the
processor that has SendID as network address. The
SendTag is an identifying tag assigned to the specific
message and is sent, together with the size and the
destination address inside the packet header, to be de-
coded by the receiving network interface. The storing
inside the SendTag register triggers the starting of the
NoC transaction.
At the other end of the communication, the pro-
cessor needs to execute a receive() to complete the
transaction. The receive() microcode, as a first step,
stores the primitive parameters inside three memory-
mapped registers. Once such registers are pro-
grammed, the processor keeps polling the DMA han-
dler, where a dedicated circuitry is in charge of com-
paring the incoming messages with the contents of
the three registers. In case of matching, the message
data is stored in memory, at the location identified by
ReceiveAddress. It is useful to point out that, when
the receive is not already executed at the time that the
message reaches the destination NA, the address gen-
erator is capable of temporarily store the data in a re-
served region of the memory used as buffer until it is
needed.
3.3 Interrupt Generation Support
As a further extension, a tag decoder has been instan-
tiated inside the Network Adapter. It is in charge of
detecting a set of predetermined tag configurations,
that are reserved for the purpose of remote interrupt
generation. In case of matching, the tag decoder trig-
gers an interrupt signal that is connected to the pro-
cessor interrupt controller. This feature can be used to
allow a processor in the system to generate an asyn-
chronous event on another processor, such as, for ex-
ample, the monitoring and control related signaling
that is exploited in this paper. The number and the
range of reserved tag configurations are configured at
design time. By default, the tag is 16 bits wide, and 16
different configurations generate a different interrupt
signal to the processor. This means that 16 compara-
PECCS2013-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
264

(a) KPN application (b) MCA-EB (c) MCA-EI (d) Legend
Figure 1: Self-adaptation approaches for KPN applications on NoC.
tors and 16 registers are instantiated inside the NA
netlist after synthesis. If the interrupt signal is gener-
ated directly by the comparing logic, some spurious
fluctuations can be generated at the receiving of the
message, during the transient of the circuitry switch-
ing. Being the interrupt controller set to be sensitive
on rising edge of the interrupt signal, in order to avoid
such fluctuations to generate an interrupt in the pro-
cessor, the interrupt signal is buffered in a register be-
fore being forwarded to the interrupt controller. This
hardware overhead can be customized reducing the
number of reserved tags according to the application
features.
Besides implementing the monitoring and control
interrupts that will be described more in detail in the
following, the interrupt generation is used to imple-
ment a request based flow control between KPN tasks
mapped on the NoC platform. Such flow control re-
lies on two software FIFOs created for every com-
munication channel in the task graph, more in de-
tail respectively in the producer and consumer private
memory. The producer keeps writing the produced
data inside the software FIFO and blocks only when
it is full. The consumer, at the other end of the chan-
nel, keeps reading input data from its software FIFO.
When this FIFO is empty, a request interrupt message
is sent from the consumer to the producer, triggering
it to perform a send of all the data inside its software
FIFO.
4 INTERRUPT-BASED
SELF-ADAPTATION FOR KPN
APPLICATIONS ON NoC
In this section, we present our new approach, event-
based MCA using inter-processor interrupts (MCA-
EI), for implementing self-adaptive KPN applications
on NoC-based MPSoCs. Similar to MCA-EB, MCA-
EI introduces an MCA feedback loop into the ap-
plication pipeline. The monitor (equivalent to sen-
sors) measures various parameters to check whether
the application meets its goals. The controller takes
decisions so as to steer the system towards the goal,
whereas adapters (similar to actuators) are in charge
of actually performing adaptations. Since processes
are generally mapped to different resources on MP-
SoCs, it is quite possible that the parameter to be mon-
itored is present on one tile, whereas the task to be
adapted may exist on a different tile. This forces the
monitor,controller and adapters to be implemented on
different tiles in a distributed manner. Both MCA-EB
and MCA-EI incorporate a generic fuzzy logic based
adaptation controller and implement similar monitor-
ing and adaptation techniques. Similarly both uses
event-based control; which means the adaptation con-
trol is triggered upon the occurrence of specific events
in the system. However they differ based on how
the MCA mechanism interacts with the application.
MCA-EB uses blocking-channels to this end, whereas
MCA-EI is based on inter-processor interrupts.
Similar to MCA-EB scheme, MCA-EI also repre-
sents a self-adaptive application in terms of the fol-
lowing entities: monitoring tasks calling monitoring
functions, adaptive tasks implementing adapter func-
tions, adaptation controller(s) and adaptation propa-
gation channels alongside the original task graph. A
simple self-adaptive application pipeline built using
MCA-EI framework is shown in Fig. 1(c). The design
and usage of monitoring functions, adapter functions
and fuzzy adaptation control algorithm are as detailed
in (Derin et al., 2012). Hence only the main differ-
ences in comparison with the MCA-EB is presented
here.
Fig. 2 depicts the pseudo-code representing a
monitoring task in MCA-EI scheme. The modifica-
tion done on a normal KPN task to convertit to a mon-
itoring task (i.e.; by adding calls to monitoring func-
tions) is colored in blue. In this example the task is
equipped with throughput (in terms of bit-rate) mon-
itoring capabilities. The difference to be noted com-
pared to MCA-EB is that, instead of sending the mon-
itored parameter value over blocking channel it is sent
as an interrupting message to the NoC tile where the
controller is run.
As compared to MCA-EB (where the controller
is a separate task), the control algorithm is run as
part of interrupt handler in MCA-EI. As shown in
the pseudo-code of the controller given in Fig. 3,
ALowOverheadSelf-adaptationTechniqueforKPNApplicationsonNoC-basedMPSoCs
265
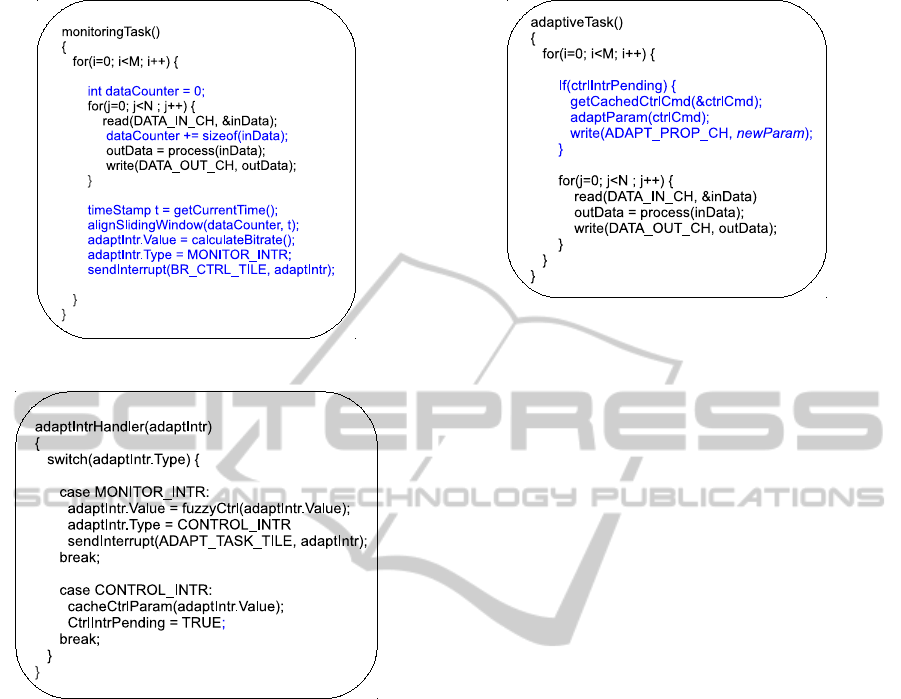
Figure 2: A monitoring task in MCA-EI scheme.
Figure 3: Adaptation interrupt handler in MCA-EI scheme.
the interrupt handler handles two kinds of interrupts;
a) monitor interrupts (MI) - from monitoring task’s
tile to adaptation controller’s tile, b) control inter-
rupts (CI) - from adaptation controller’s tile to adap-
tive task’s tile. Upon receiving an MI, the interrupt
handler runs the fuzzy control algorithm with the re-
ceived monitored parameter value as the argument to
generate the control command. Subsequently it in-
terrupts the adaptive task’s tile (using CI) to send the
control command. On the other hand, CI is handled
as follows; first the received control command will be
cached so that it can be processed by the adaptive task
later, second a flag is set to inform the adaptive task
that a control interrupt had occurred.
An adaptive task in MCA-EI is shown in Fig. 4. It
checks for any previous interrupts from the controller
tile at a fixed location in the task body. In case of
any previous interrupts the adaptive function will be
invoked (with the cached value of control command)
to perform the required actions. Further it also sends
the modified values of the adapted parameter to other
Figure 4: An adaptive task in MCA-EI scheme.
tasks (using APC) which need these updated param-
eters. In KPN model, processes can receive external
input only via blocking FIFO channels. Checking the
pending controller interrupt flag is a non-blocking op-
eration, thus it does not affect the liveness of the ap-
plication.
The functioning of MCA-EI can be summarized
as follows. When the event which triggers the
adaptation control is generated, the monitoring task
performs monitoring and interrupts the adaptation-
controller’s tile. The controller tile receives this in-
terrupt and runs the control algorithm as part of the
interrupt handler. Subsequently, the controller inter-
rupts the tile of the adaptive task to send the control
command. The interrupt handler of the adaptive task
tile caches the interrupts received, to be processed by
the adaptivetasklater. When the adaptivetask reaches
the predefined point of execution, it checks for any
cached interrupts and performs the required adapta-
tions if necessary.
The MCA-EI approach increases the application
throughput by using an interrupt mechanism instead
of blocking FIFO channels in the MCA feedback
loop. MCA-EI scheme has the advantage of not
stalling the application pipeline since the adaptive
tasks never wait for blocking control commands from
the controller. This helps the system to attain higher
throughput as compared to the MCA-EB scheme.
In our work, the correctness of the reconfigura-
tion relies on the KPN processes reaching an execu-
tion point at which their state does not relate to any
computation done using the parameter to be updated.
An adaptation command via a control channel or an
adaptation propagation channel can only be served at
such points. For a general KPN application, the iden-
tification of the adaptation execution points and adap-
tation propagation channels is to be done manually by
the application programmer. It should be done care-
fully to guarantee a correct parameter reconfiguration.
PECCS2013-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
266
(a) MJPEG Encoder Pipeline (b) MCA-EB (c) MCA-EI
Figure 5: Self-adaptive MJPEG encoder using different approaches.
Otherwise, the functional correctness may be compro-
mised and also deadlocks may be introduced. In the
specific case of polyhedral process networks (PPN)
(Verdoolaege, 2010), the state of processes reduce to
the iterator values at the top of the for-loops of each
process. Therefore such locations, as shown in Fig. 4,
are ideal candidates for adapting PPN processes.
5 CASE STUDY: MOTION JPEG
(MJPEG)
This section presents MJPEG (Lieverse et al., 2001),
as a case study to demonstrate our technique. A typ-
ical MJPEG encoder pipeline is shown in Fig. 5(a),
where all the components are modeled as KPN tasks.
The SRC task captures the input video frame-by-
frame and feeds it to the DCT task one block (8×8
pixels) at a time, to perform the discrete cosine trans-
form. The Q task quantizes each video block using an
8×8 QMatrix, whereas VLE task does entropy cod-
ing on the video blocks before generating the final
MJPEG stream by inserting headers/markers to indi-
cate the start/end of each frame.
5.1 Self-adaptive MJPEG
We implemented two self-adaptive MJPEG encoders
on our 2× 2 NoC-based FPGA platform using the
MCA-EB and MCA-EI approaches respectively as
shown in Fig. 5. Our implementations support au-
tonomous control of bit-rate (BR) and frame-rate (FR)
at run-time. Bit-rate adaptation is achieved by con-
trolling the quality of encoding (by scaling the QMa-
trix accordingly), whereas frame-size scaling is used
to control the frame-rate. The implementation de-
tails of the sliding-windowbased monitor,fuzzy-logic
controller and the bit-rate/frame-rateadapters are pro-
vided in (Derin et al., 2012).
Table 1: Comparison of steady-state overheads.
FR-Overhead (%) BR-Overhead (%)
MCA-EI 0.385 0.386
MCA-EB 6.663 6.667
6 RESULTS
In this section, the results from the adaptive MJPEG
case study using a 128×128 test video are presented.
The MCA-EI approach is compared against MCA-
EB in terms of the adaptation overhead and the con-
trol quality. Adaptation overhead is measured as the
reduction in frame-rate and bit-rate, whereas control
quality is quantified using rise-time/fall-time (RT/FT)
and mean-absolute-error (MAR). To calculate these
two metrics for a monitored parameter, the encoder is
run for a fixed number of frames of a test video with
an initial value of the parameter. Then its value is
changed to the target value and the system is allowed
to adapt. The time taken for the parameter to reach
within a tolerance band (±5%) about its target value
is the rise/fall time. The absolute error value for the
parameter is calculated for all measurements starting
from where it reached the tolerance band till the last
frame. The mean of these absolute error values gives
the MAR.
6.1 Adaptation Overhead
To measure the overhead due to the introduction of
the MCA feedback loop in the application pipeline,
the following procedure is used. First, the encoder is
run without the feedback loop as well as the adapta-
tion propagation channels to obtain the average val-
ues of FR and BR without the framework. The ex-
periment is repeated after introducing the MCA loop
and the additional channels to obtain the reduced val-
ues. In this case both BR and FR control is turned off
inside the controller, since only the overhead due to
the framework needs to be measured. Table 1 com-
ALowOverheadSelf-adaptationTechniqueforKPNApplicationsonNoC-basedMPSoCs
267

(a) Bit-rate adaptation (b) Frame-rate adaptation
Figure 6: Results for initial BR = 200000 bps, initial FR = 8 fps and final BR = 300000 bps, final FR = 16 fps.
pares the steady-state overhead (in terms of bit-rate
and frame-rate reduction) for MCA-EI and MCA-
EB schemes. It can be seen that the overhead in
case of the MCA-EB is much more than MCA-EI
because the application pipeline is stalled at the end
of every frame. Firstly, the tasks from adaptive tasks
till the monitoring task are stalled consecutively un-
til the final frame block is processed by the moni-
toring task. Only then, the monitoring can be per-
formed and the controllers can provide the control
command required to unblock the adaptive tasks. In
case of MCA-EI the pipeline is never stalled, yield-
ing higher throughput. Also in MCA-EI, the adapter
tiles will not be interrupted by the controller during
steady-state; whereas in MCA-EB, the adaptive tasks
have to wait for the control command for every frame
even in the steady-state. The throughput reduction in
the MCA-EI scheme (about 0.4%) is due to the ex-
ecution of the controller inside the interrupt service
routine (in our experiments, the controller is mapped
on the processor with the heaviest workload).
6.2 Control Quality
Fig. 6 shows how the framework adapts (using MCA-
EB and MCA-EI) when the encoder is run with ini-
tial BR = 200000 bits/s (bps), initial FR = 8 frames/s
(fps), final BR = 300000 bps and final FR = 16 fps.
Here the goals are changed from initial to final at the
60
th
frame and the framework is configured such that
the control algorithm is run for every third frame.
Table. 2 compares the two schemes in terms of
rise-times (RT) and mean-absolute-errors (MAR) for
this experiment. It can be seen that the rise-times
for the MCA-EB scheme is considerably higher than
MCA-EI due to the stalling of the pipeline at the end
of each frame. However, the MAR is within tolerable
limits (±5% of final values) for both.
Figure 7: Effect of controller workload on adaptation over-
head.
6.3 Adaptation Overhead vs. Controller
Workload
Workload of the controller - represented as the cal-
culation time of the control decision, is simulated by
introducing delay in the controller code. To obtain
the steady-state overhead, the MJPEG encoder is run
with the MCA feedback loop in place but the bit-
rate and frame-rate control being turned off. Fig. 7
shows the variation in the steady-state overhead (as
percentage frame-rate reduction) with respect to the
controller workload for the MCA-EB and MCA-EI
schemes. As obvious, the overhead increases with
increasing controller workload. But this increase is
far less in interrupt-based scheme as compared to
the blocking-channel case. In case of the MCA-EB
scheme the entire encoder pipeline is stalled while the
control algorithm is run, irrespective of on which tile
the controller is located. The throughput reduction in
the MCA-EI scheme is due to the controller stealing
several cycles from the application task that runs on
its tile. These experiments are carried out with the
controller running on the processor with the heaviest
workload (i.e., the tile of DCT) and shows that the in-
PECCS2013-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
268
Table 2: Comparison of control-quality.
RT-BR (secs) RT-FR (secs) MAR-BR (bits) MAR-FR (frames)
MCA-EI 0.364 0.364 6551 (2.2%) 0.57 (3.6%)
MCA-EB 0.579 0.579 7958 (2.7%) 0.63 (4.0%)
terrupt based approach is much superior for complex
controllers that consume more time. Furthermore,
the overhead can be almost eliminated in the MCA-
EI scheme by running the controller on a tile where
no application task is present. However, such an im-
provement is not possible for the MCA-EB scheme.
7 CONCLUSIONS
In this paper, we presented the MCA-EI approach
aimed towards developinglow-overheadself-adaptive
KPN applications on NoC-based MPSoCs. Com-
pared to the MCA-EB scheme (Derin et al., 2012),
it makes use of inter-processor interrupts to increase
the application throughput. Results from the MJPEG
case study show that the MCA-EI scheme outper-
forms MCA-EB in terms of overhead (about 6.25%
reduction) while offering similar or better quality of
control. The sensitivity of adaptation overhead to
controller workload is also much less in case of MCA-
EI. However, MCA-EI requires platform support to
send data to remote tiles using interrupting messages
over the NoC. This support is implemented by extend-
ing the network interface with a tag decoder.
ACKNOWLEDGEMENTS
This work was funded by the European Commission
under the project MADNESS (No. FP7-ICT-2009-4-
248424). The paper reflects only the authors’ view;
the European Commission is not liable for any use
that may be made of the information contained herein.
REFERENCES
Bertozzi, D. and Benini, L. (2004). Xpipes: a network-on-
chip architecture for gigascale systems-on-chip. Cir-
cuits and Systems Magazine, IEEE, 4(2):18 – 31.
Busseuil, R., Barthe, L., Almeida, G. M., Ost, L., Bruguier,
F., Sassatelli, G., Benoit, P., Robert, M., and Torres, L.
(2011). Open-Scale: A scalable, open-source NOC-
based MPSoC for design space exploration. In Pro-
ceedings of the International Conference on Reconfig-
urable Computing and FPGAs (ReConFig’11), pages
357–362, Los Alamitos, CA, USA.
Derin, O., Ferrante, A., and Taddeo, A. V. (2009). Coor-
dinated management of hardware and software self-
adaptivity. J. Syst. Archit., 55(3):170–179.
Derin, O., Ramankutty, P. K., Meloni, P., and Cannella, E.
(2012). Towards self-adaptive KPN applications on
NoC-based MPSoCs. Advances in Software Engineer-
ing, 2012(Article ID 172674):13 pages.
Kahn, G. (1974). The semantics of a simple language for
parallel programming. In Information Processing ’74:
Proceedings of the IFIP Congress. North-Holland.
Lieverse, P., Stefanov, T., van der Wolf, P., and Deprettere,
E. (2001). System level design with SPADE: an M-
JPEG case study. In Proceedings of the IEEE/ACM
International Conference on Computer Aided Design
(ICCAD’01).
Mattson, T. G., Riepen, M., Lehnig, T., Brett, P., Haas, W.,
Kennedy, P., Howard, J., Vangal, S., Borkar, N., Ruhl,
G., and Dighe, S. (2010). The 48-core SCC processor:
the programmer’s view. In Proceedings of the Interna-
tional Conference for High Performance Computing,
Networking, Storage and Analysis, SC ’10.
Meloni, P., Tuveri, G., , Raffo, L., Cannella, E., Stefanov,
T., Derin, O., Fiorin, L., and Sami, M. (2012). System
adaptivity and fault-tolerance in NoC-based MPSoCs:
the MADNESS Project approach. In Proceedings of
15th EUROMICRO Conference on Digital System De-
sign Architectures, Methods and Tools (DSD’12).
Micheli, G. D. and Benini, L. (2006). Networks on Chips:
Technology and Tools. Morgan Kaufmann, San Fran-
sisco, 1st edition.
Nollet, V., Verkest, D., and Corporaal, H. (2010). A safari
through the mpsoc run-time management jungle. J.
Signal Process. Syst., 60(2):251–268.
Sandee, J. (2006). Event-driven control in theory and prac-
tice - trade-offs in software and control performance.
PhD thesis, Eindhoven University of Technology.
Verdoolaege, S. (2010). Polyhedral process networks.
Handbook of Signal Processing Systems, pages 931–
965.
Wentzlaff, D., Griffin, P., Hoffmann, H., Bao, L., Edwards,
B., Ramey, C., Mattina, M., Miao, C.-C., Brown III,
J. F., and Agarwal, A. (2007). On-chip interconnec-
tion architecture of the Tile processor. IEEE Micro,
27(5):15–31.
Zhai, J., Nikolov, H., and Stefanov, T. (2011). Model-
ing adaptive streaming applications with parameter-
ized polyhedral process networks. In Proceedings of
the 48th Design Automation Conference, pages 116–
121. ACM.
ALowOverheadSelf-adaptationTechniqueforKPNApplicationsonNoC-basedMPSoCs
269
