
Curve Recognition for Underwater Wrecks and
Handmade Artefacts
Davide Moroni, Maria Antonietta Pascali and Marco Reggiannini and Ovidio Salvetti
Institute of Information Science and Technologies (ISTI),
National Research Council of Italy (CNR), Pisa, Italy
Abstract. In the framework of the development of autonomous vehicle in order
to perform a survey of extreme environments, such as the seabed, the demand for
computer vision to support the on-board decision system is increasing. In particu-
lar we devote this work to improve the existing underwater curve detection proce-
dures. We propose a method that statistically highlights archaeological artefacts
among its environment, weighting properly the persistence of meaningful curves
in the video sequence.To this aim we made use of an existing parameterless algo-
rithm ELSD, suitable for digital image processing [1].
1 Introduction
The recent advances in underwater robotics and communications fostered a lot of work
in artificial intelligence and computer vision algorithms to be integrated in modern Au-
tonomous Underwater Vehicles. The marine environment and the seafloor present very
challenging conditions for a theoretical and experimental setting. Actually there exist
many different techniques (e.g. [2, 3]) for the seafloor survey and the underwater object
detection. Many choices in term of device employed, or environment settings (deep or
shallow water, etc.), and the difficulty in each validation procedure produce a rich fam-
ily of techniques and no settled standards(e.g. [4–7]. In particular there are not relevant
methods and algorithms performing a real time detection of archaeological objects,
based on their geometrical description. This is mainly due to the fact that the efforts
of the scientific communities have been primarily devoted to the offline detection and
classification of archaeological artefacts, e.g. based on model fitting.
This paper faces the specific problem of curve detection and recognition in the un-
derwater environment. The focus on curve detection is motivated by the fact that a high
concentration of regular curves is a marker for the presence of manmade objects or ship-
wrecks. Our results show that there is a nice correlation between the weighted index of
detection and the groundtruth assessed in our underwater acquisitions. At the same time
we propose a statistical and iterative method to give relevance to a finding in the scene
with respect to its natural surroundings; this way we point to automate the parameters
setting and free the AUV intelligence from the operator intervention. Our results are
promising albeit preliminary because of the scarcity of available data. Anyway we aim
at carrying out more interesting tests on the data that will be acquired in the AUV’s
surveys, planned for the ongoing projects THESAURUS and ARROWS.
Moroni D., Pascali M., Reggiannini M. and Salvetti O..
Curve Recognition for Underwater Wrecks and Handmade Artefacts.
DOI: 10.5220/0004392300140021
In Proceedings of the 4th International Workshop on Image Mining. Theory and Applications (IMTA-4-2013), pages 14-21
ISBN: 978-989-8565-50-1
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

2 State of the Art
The automatic detection of elementary geometric features (line segments, elliptical
arcs) in images, is quite an old issue in computer vision [8, 9]. The current proce-
dures for geometric features recognition can be roguhly classified into two categories:
Hough-based and edge chaining methods.
The Hough-based algorithms implement variants of the Hough transform. These
methods ensure that pixels belonging to the same geometric stucture are mapped to the
same point into an appropriately defined parameter space. We can define an accumulator
array in which every cell, corresponding to specific parameter values, is augmented ev-
ery time that a pixel is mapped on that cell. Computing the peaks of this array allows to
identify the potential candidates. Standard Hough-based implementation requires high
computational burden handling, especially for elliptical shape recognition: indeed, in
that case the parameter space has five dimensions, corresponding to the five parame-
ters of the ellipse, resulting in a O(n
5
) complexity. Basc¸a et al. [10] have proposed
a method for speeding up the candidate identification process by implementing a ran-
dom search method. This allows to lower the computational complexity more than two
orders of magnitude.
A second class of detection methods relies on edge chaining techniques, which use
extensively the geometric properties of the sought features, such as straightness criteria
for line segments or curvature properties for ellipses. Usually these algorithms begin
with a seed pixel (or a group of pixels), and subsequently, other pixels are added, pro-
vided they obey some geometric properties of the sought feature.
Nguyen and Kerautret proposed a method for ellipse detection based on a prelimi-
nary decomposition of an edge image into curve primitives followed by a fitting tech-
niques. First the image is processed by an edge detection filter in order to extract a set
of digital curves representing the image contours. The analysis is then limited to every
single group of pixels representing a contour curve in the image. The curve undergoes
a particular transformation that maps the contour lines into the so called tangent space.
As it is explained in [11] the tangent space representation allows a much easier assess-
ment of the curvature properties of the grouped contour. More in detail it is possible
to decide whether a set of line segments belongs to a straight line or if these segments
are part of more elliptical structures. The final assessment is carried out by a fitting
procedure in order to decide whether the curve can be classified as a circle or an ellipse.
This paper is inspired by a successful parameterless approach that was introduced
by Desolneux et al. [12], known as the a contrario approach. The detection algorithm is
based on a three-stage process: first, a candidate selection stage is carried out by gather-
ing groups of pixels sharing appropriate orientation properties (for example line recog-
nition requires the alignment between pixels where as for circles and ellipses detection
some curvature constraints must be fulfilled); in a second stage (validation stage), the
candidates are further analysed in order to decide whether they are meaningful struc-
tured groups of pixels or if they represent an unstructured cluster. This is an important
step since it allows the rejection of false positives by automatic computation of detec-
tion threshold. The estimation process is based on the so called Helmoltz’s perception
principle: it essentially states that there is no perception in white noise. In the final
stage (model selection) the candidates are classified as belonging to a specific model
15

(line, circle, ellipse) by considering the most suitable model as the one producing fewer
false alarms.
In the following you may find a description of the implemented algorithm and the
related experimental results.
3 Methods
As stated above the starting point of our method is the ELSD algorithm presented in [1];
it extends a previous one detecting locally straight contour in digital images to the
detection of locally circular and elliptical contours: LSD (see [13, 14].
LSD is a linear-time Line Segment Detector giving subpixel accurate results. It is
designed to work on any digital image without parameter tuning and it controls its own
number of false detections (on average, one false alarms is allowed per image). The al-
gorithm is based on Burns, Hanson, and Riseman’s method [15], and uses an a-contrario
validation approach according to Desolneux, Moisan, and Morel’s theory [12]. The a-
contrario model, used for line segment detection, is defined as a stochastic model of
the level-line field satisfying certain properties. The generalization of the theoretical
approach to the detection of circles and ellipses is clearly explained in [1]. The most
interesting feature is the accuracy in the ellipse fitting, due to a non-iterative technique
that uses gradient orientations and the algebraic formalization of the conic fitting.
We experienced quite good performances of ELSD on synthetic and natural images.
Then we tried to apply it in order to get an automated curve detector for on-board optical
analysis to be performed during the AUV survey. As we already said, this is not an easy
task because of the several variables making each part of the survey very different from
the previous one. To overcome such randomness in the boundary / natural conditions,
we propose the following pipeline:
1. image acquisition and preprocessing
2. ELSD for a sequence of 10 adjacent frames - fine tuning of internal parameters (e.g.
ρ gradient magnitude threshold, τ angle tolerance, D minimal density of aligned
points for each candidate region), computation of the discovery threshold (based on
weighted sum of curve detections)
3. ELSD for a sequence of 90 adjacent frames - reporting suprathreshold detection
The core step in the proposed method is the definition of the discovery threshold . This
threshold is newly defined at each cycle as the weighted sum of the number of curve
detected and recognized. We set {3, 2, 1} as weights for each type of sought curve {
ellipse, circle, line }. This choice is motivated by the strong belief that elliptical and
circular arc are more meaningful (and rare) than line segments in the archaeological
object we look for (e.g. amphoras, and plates, commonly found in the cargoes of ancient
vessels). Then we compute the weighted average over the detected curves W A for the
test set of 10 frames, take as discovery threshold the W A incremented of a 20%; this
threshold is applied to each frame (included the first 10 fs on which it is computed) and a
warning is produced for each frame containing a suprathreshold number of detections.
As shown in the graphics of the next Section there is a nice correlation between all
16

0
10
20
30
40
50
60
70
80
1
7
13
19
25
31
37
43
49
55
61
67
73
79
85
91
97
103
109
115
121
127
133
139
145
151
157
163
169
175
181
187
193
199
205
211
217
223
229
235
241
247
253
259
265
271
277
283
289
295
301
307
313
319
325
331
337
343
349
355
361
367
373
379
385
391
397
403
409
415
421
427
433
439
445
451
457
463
469
475
481
487
493
499
505
511
517
Curve detected (blue=ell; red=circ; green=line)
Series1 Series2 Series3
0
2
4
6
8
10
12
14
16
18
20
1
7
13
19
25
31
37
43
49
55
61
67
73
79
85
91
97
103
109
115
121
127
133
139
145
151
157
163
169
175
181
187
193
199
205
211
217
223
229
235
241
247
253
259
265
271
277
283
289
295
301
307
313
319
325
331
337
343
349
355
361
367
373
379
385
391
397
403
409
415
421
427
433
439
445
451
457
463
469
475
481
487
493
499
505
511
517
Weights: 3,2,1
Fig. 1. Graphs of the Curve Detection, and of the Weighted Curve Detection (computed on the
first video acquisition).
these three sets of data: detections, discovery threshold, and groundtruth of discovery
(manually evaluated with four degrees of interest).
In particular we decided to increase ELSD sensitiveness to intensity changes suit-
able modifying the internal parameters, such as ρ, τ, D.
4 Results
Our first results were achieved thanks to some experiments held in a pool in Pistoia,
and near the Elba island, in Tuscany. In both cases data were acquired through an ana-
logic colour camera (precisely Bowtech) designed for underwater environment, with
high light sensitivity (it is the same optical device that has been integrated in the AUV
acquisition platform, and the acquisition is part of the experiment preliminary to the
HW/SW integration).
To the aim of an integration in the AUV acquisition platform, we need to consider
at least two important preprocessing steps:
- Perform a frame extraction from the whole frame sequence, according to AUV
speed and to the consumption time of the algorithm (that depends on each image size);
- Select the balance between RGB channels, and then the proper intensity to be
used for the gradient field computation and the contour extraction. This results in an
enhancement of the video quality, and it depends on the natural environment and it
could be set only once per survey.
We processed only 5fps, because the slow speed of the boat allowed a large overlap
between two adjacent frames. Also we applied the ELSD algorithm to an intensity ob-
tained as a balance between the RGB channels that solves the problem of diverse degree
of absorption of colours in underwater imaging. This last preprocessing was not needed
in the second video, because the distance between the optical device and the target is
not large, and the optical device was equipped with proper filter.
4.1 Pool Experiment
The pool has a depth of about 2 m, and we placed on the pool bottom a set of mock-up
17
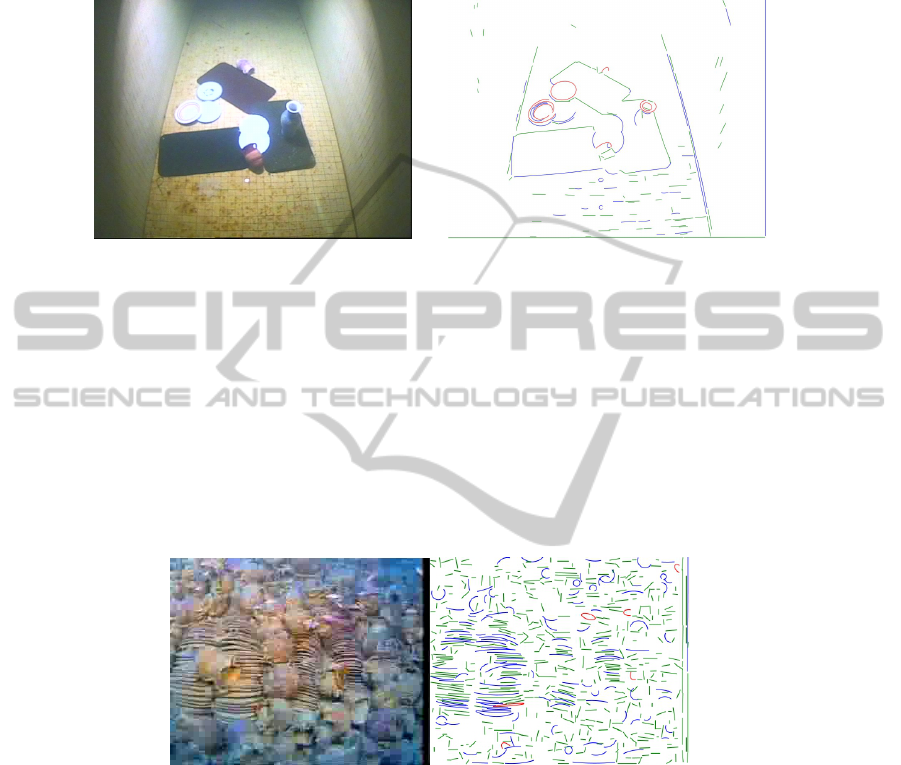
objects (amphora, plates, and small carpets). As you can see in the images below, the
algorithm used is quite efficient in detecting the geometric curves in the scene.
Fig. 2. Results of the primary curve detection applied to a frame in which an amphora is visible.
4.2 Elba Shipwreck Site
We processed a video of a known archaeological site near Elba. The video shows a sur-
vey of the area, large and rich in amphoras and plates. Actually, it shows many amphoras
and plates in the 90% of the images. Even if the video sequence is not representative of
a simulation of a discovery (the real setting for which this method has been thought),
the suprathreshold detections give account of the geometric richness of the seabed sat-
isfactorily. In the following images it is shown the result of detection, Fig. 3; then, in
Fig. 4, the graphics comparing the weighted detection with the groundtruth, and the
suprathreshold detections with the groundtruth.
Fig. 3. Results of the primary curve detection applied to a frame in which a set of plates is visible.
4.3 Elba Survey
A mock-up target (modern amphora) has been placed on the sandy seabed. Due to
favorable water and weather conditions in Elba, we could acquire a nice set of data, at
about 24 fps, in PAL resolution, despite the distance between the optical device and the
target (about 9 m). In the following images it is shown the result of detection, Fig. 5;
then, in Fig. 6, the graphics comparing the weighted detection with the groundtruth, and
the suprathreshold detections with the groundtruth.
18

0
50
100
150
1
13
25
37
49
61
73
85
97
109
121
133
145
157
169
181
193
205
217
229
241
253
265
277
289
301
313
325
337
349
361
373
385
397
409
421
433
445
457
469
481
493
505
517
529
541
553
565
577
589
601
613
625
637
649
661
673
685
697
709
721
733
Detection(blue) vs. GroundTruth(red)
0
50
100
150
1
13
25
37
49
61
73
85
97
109
121
133
145
157
169
181
193
205
217
229
241
253
265
277
289
301
313
325
337
349
361
373
385
397
409
421
433
445
457
469
481
493
505
517
529
541
553
565
577
589
601
613
625
637
649
661
673
685
697
709
721
733
GroundTruth(red) vs. Suprathreshold Detections (blue)
Fig. 4. Graphs of the video sequence of the shipwreck near Elba island: Detections and
Suprathreshold vs. GroundTruth
Fig. 5. Results of the primary curve detection applied to a frame in which an amphora is visible.
0
2
4
6
8
10
12
14
16
18
20
1
7
13
19
25
31
37
43
49
55
61
67
73
79
85
91
97
103
109
115
121
127
133
139
145
151
157
163
169
175
181
187
193
199
205
211
217
223
229
235
241
247
253
259
265
271
277
283
289
295
301
307
313
319
325
331
337
343
349
355
361
367
373
379
385
391
397
403
409
415
421
427
433
439
445
451
457
463
469
475
481
487
493
499
505
511
517
Detection(blue) vs. GroundTruth(red)
-2
0
2
4
6
8
10
12
1
7
13
19
25
31
37
43
49
55
61
67
73
79
85
91
97
103
109
115
121
127
133
139
145
151
157
163
169
175
181
187
193
199
205
211
217
223
229
235
241
247
253
259
265
271
277
283
289
295
301
307
313
319
325
331
337
343
349
355
361
367
373
379
385
391
397
403
409
415
421
427
433
439
445
451
457
463
469
475
481
487
493
499
505
511
Grountruth (red) vs. Suprathreshold Detections (blue)
Fig. 6. Graphs of the Elba experiment: Detections and Suprathreshold vs. GroundTruth.
5 Conclusions and Further Work
In this paper we have presented a new method for man-made object recognition in
underwater environment. More in detail our research was inspired by the work of Pa-
traucean et al. [1], who developed a robust and efficient curve recognition algorithm
able to detect and recognize line-segments, arcs of circle and ellipse in images. Starting
19

from that we implemented a procedure for automatic recognition of interesting objects
in the video streams captured during a survey mission. The method is based on the es-
timation of statistical parameters from a set of images in which interesting geometric
shapes have been highlighted: in particular a descriptor based on the detected number
of circular shapes has been produced and tested.
In the framework of our research work we aim to produce new technologies for un-
derwater archaeological survey, and we believe that the exploitation of standard supple-
mentary survey sensors, such as acoustic sensors, can be promising: since the pictorial
quality of well-captured sonar images is often comparable to the optical ones, computer
vision algorithms can be applied to both the data typologies. We aim to develop a data
fusion model in which the information provided by the multi-sensor platform can be
exploited for a higher level interpretation of the underwater scene.
Since our multi-sensor system is actually composed of a pair of cameras we aim also
at developing a procedure based on the 3D reconstruction of the captured scene. At the
resulting estimation we aim to apply 3D fitting procedures in order to recognize specific
archaeological models (amphoras, etc..) and assign a score to the scene depending on
the number of recognized models. This can be thought as a 3D extension of the method
presented in this paper.
Acknowledgements
This work has been partially supported by PAR FAS Tuscany Project “THESAURUS”
– Techniques for Underwater Exploration and Archaeology Through Swarms of Au-
tonomous Vehicles and by FP7 Project “ARROWS” – ARchaeological RObot systems
for the World’s Seas. We would like to thank our colleagues from Centro Piaggio in
Pisa for their contribution in a large part of the work, and also Dr. Michele Cocco e
Dr. Lavinio Gualdesi (EdgeLab s.r.l.) for their kind support and for providing access to
the testing area.
References
1. Patraucean, V., Gurdjos, P., von Gioi, R. G.: A parameterless line segment and elliptical arc
detector with enhanced ellipse fitting. In: ECCV (2). Lecture Notes in Computer Science,
Springer (2012) 572–585
2. Pizarro, O., Eustice, R., Singh, H.: Large area 3-d reconstructions from underwater optical
surveys. IEEE Journal of Oceanic Engineering 34 (2009) 150–169
3. Bonin, F., Burguera, A., Oliver, G.: Imaging systems for advanced underwater vehicles.
Journal of Maritime Research VII (2011) 65–86
4. Zhang, Q.: Extrinsic calibration of a camera and laser range finder. In: In IEEE International
Conference on Intelligent Robots and Systems (IROS. (2004) 2301–2306
5. Williams, S., Mahon, I.: Simultaneous Localisation and Mapping on the Great Barrier Reef.
In: IEEE International Conference on Robotics and Automation (ICRA). (2004)
6. Fusiello, A., Murino, V.: Augmented scene modeling and visualization by optical and acous-
tic sensor integration. IEEE Trans. Vis. and Comp. Graphics, Vol (2004) 625–636
7. Negahdaripour, S., Sekkati, H., Pirsiavash, H.: Optiacoustic stereo imaging: On system cali-
bration and 3-d target reconstruction, in review. In: Proc. IEEE Beyond Multiview Geometry.
(2007)
20

8. Hough, P.: Machine analysis of bubble chamber pictures. In: Proc. Int. Conf. High Energy
Accelerators and Instrumentation. (1959)
9. Ballard, D.: Generalizing the hough transform to detect arbitrary shapes. Pattern Recognition
13 (1981) 111–122
10. Basca, C., Talos, M., Brad, R.: Randomized hough transform for ellipse detection with result
clustering. In: Proceedings of the EUROCON 2005. (2005)
11. Nguyen, T., Kerautret, B.: Ellipse detection through decomposition of circular arcs and line
segments. In: International Conference, ICIAP’11, LNCS, Ravenna, Italy (2011)
12. Desolneux, A., Moisan, L., michel Morel, J.: Gestalt theory and computer vision. In: Seeing,
Thinking and Knowing, Kluwer (2002) 71–101
13. Grompone von Gioi, R., Jakubowicz, J., Morel, J. M., Randall, G.: LSD: a Line Segment
Detector. Image Processing On Line 2012 (2012)
14. von Gioi, R.G., Jakubowicz, J., Morel, J., Randall, G.: On straight line segment detection.
Journal of Mathematical Imaging and Vision 32 (2008) 313–347
15. J. Brian Burns, Allen R. Hanson, E. M. R.: Extracting straight lines. IEEE Transactions on
Pattern Analysis and Machine Intelligence 8 (1986) 425–455
21
