
Analytical Forward Kinematics to the 3 DOF Congruent Spherical
Parallel Robot Manipulator
Ping Ji
1
and Hongtao Wu
2
1
Department of Industrial and Systems Engineeering, The Hong Kong Polytechnic University,
Hung Hom, Kowloon, Hong Kong
2
Department of Mechanical Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing, P.R. China
Keywords: Robot Manipulator, Parallel Platform, Forward Kinematics, Analytical Solution.
Abstract: This paper studies the kinematics of a special three degree-of-freedom (3 DOF) spherical parallel robot
manipulator, where the two pyramids are exactly the same and so it is commonly called the 3 DOF
congruent spherical parallel platform. Due to this special structure, the movement of the mobile pyramid can
be regarded as the rotation of a rigid body from its base posture to its current status. By use of this special
property, the forward kinematics of the parallel robot manipulator is obtained in this paper, and the final
solution is a univariate quartic equation, which can be solved analytically without numerical iterations. A
numerical example is provided to illustrate the method.
1 INTRODUCTION
Compared with a serial robot manipulator, a parallel
robot manipulator has its advantages of higher
rigidity and stiffness, simpler structure, better
accuracy, and heavier loading. However, its forward
kinematics is very complex. A parallel robot
manipulator may have 16, even 40 solutions to its
forward kinematics. So very few of the parallel robot
manipulators have analytical solutions in terms of
forward kinematics, and one example of these was
presented before (Bruyninckx, 1998). On the other
hand, the general 6 DOF spherical robot manipulator
was studied by Wohlhart, and its forward kinematics
has 16 solutions (Wohlhart, 1994). This paper
analyzes a general 3 DOF spherical parallel robot
manipulator, as shown in Fig. 1. This robot
manipulator has two pyramids, and it has been
studied by many researchers (Innocenti and Parenti-
Castelli, 1993); (Gosselin et al., 1994a); (Gosselin et
al., 1994b); (Huang and Yao, 1999); (Leguay-
Durand and Reboulet, 1997); (Zhang et al., 1998).
In this parallel robot manipulator, the two
pyramids are connected together by a spherical joint
at the point O, which is also the origins of the two
coordinate systems in the two pyramids. The mobile
pyramid Oa
1
a
2
a
3
can only rotate at this point O,
consequently, the parallel robot manipulator can
only provide a movement of 3 DOF pure rotation.
The structure of the parallel platform is simple,
however, the forward kinematics of this general
platform, like others, is quite complicated, and the
final solution is a univariate eighth polynomial
equation (Innocenti and Parenti-Castelli, 1993);
(Huang and Yao, 1999), and has to be solved
numerically. This paper discusses a special structure
of this spherical parallel robot manipulator, where
the mobile pyramid is exactly the same with its
counterpart, the base pyramid, in shape. So, the
structure can be called the 3 DOF congruent
spherical parallel platform. In this robot
manipulator, the movement of the mobile pyramid,
caused by the changes of link lengths, can be
regarded as the rotation of a rigid body from its base
pyramid to its current status (the mobile pyramid).
This idea, from the screw theory (Mavriodis, 1997;
Mavriodis, 1998), was used to study some other
parallel platforms (Innocenti, 1998); (Bonev et al.,
2003); (Li and Xu, 2007); (Guo et al., 2012). By use
of this special property, the final forward kinematics
to the 3 DOF congruent parallel robot is a univariate
quartic equation, which can be solved analytically,
instead of an eighth polynomial in the general case,
which has to be solved numerically.
111
Ji P. and Wu H..
Analytical Forward Kinematics to the 3 DOF Congruent Spherical Parallel Robot Manipulator.
DOI: 10.5220/0004399601110115
In Proceedings of the 10th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2013), pages 111-115
ISBN: 978-989-8565-71-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
2 FORWARD KINEMATICS
2.1 Geometric Structure
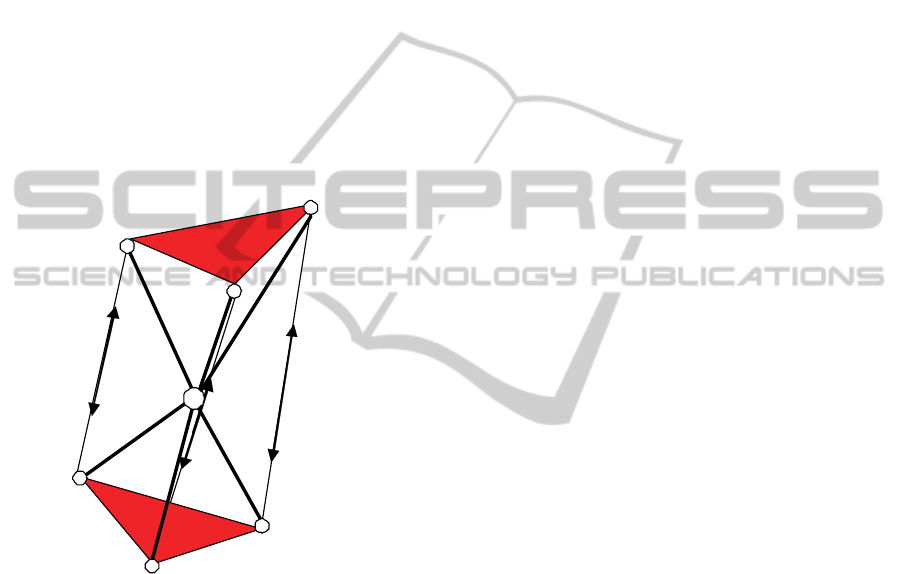
A general 3 DOF spherical parallel robot
manipulator, as shown in Fig. 1, consists of the base
pyramid with three vertices, b
1
, b
2
, b
3
and the point
O, and the mobile pyramid with three vertices, a
1
,
a
2
, a
3
and O. Here, the point O is the intersection of
the two pyramids, and also the origins of the two
coordinate systems in their respective pyramids. In
the platform, vector L
k
(its norm L
k
), that is, a link,
connects the couple vertices a
k
(its norm a
k
) and b
k
(its norm b
k
) (k = 1, 2, 3). Since the two pyramids
are the same in this special congruent platform, and
the two coordinate systems in the pyramids are also
set to be the same, we have:
Figure 1: A general 3 DOF spherical parallel platform.
a
k
= b
k
(k = 1, 2, 3) (1a)
a
k
= b
k
(k = 1, 2, 3) (1b)
For the convenience, let e
k
be the unit vector for
vector a
k
, so,
a
k
= a
k
e
k
(k = 1, 2, 3) (2)
The forward kinematics of the congruent platform is
to determine the orientation of the mobile pyramid
while the lengths of the three links, L
1
, L
2
and L
3
, are
known. From the geometric relationship in Fig. 1,
we have
L
k
= [R] a
k
– b
k
(k = 1, 2, 3) (3)
Due to Eq. (1a), Eq. (3) becomes
L
k
= ([R] – I)a
k
(k = 1, 2, 3) (4)
Here, [I] is a unit 3 × 3 matrix, and [R] is the
transformation matrix between the two coordinate
systems, or the pyramids. Obviously, Eq. (4) can be
rewritten as follows:
L
k
2
= 2a
k
2
– 2a
k
T
[R]a
k
(k = 1, 2, 3) (5)
If we set a
k
be 1 in Eq. (5), that is, L
k
stands for the
ratio between the link length L
k
and the vertex a
k
(k
= 1, 2, 3), Eq. (5) becomes
L
k
2
= 2 – 2e
k
T
[R]e
k
(k = 1, 2, 3) (6)
2.2 The Transformation Matrix
By defining λ = (λ
1
, λ
2
, λ
3
)
T
, a unit vector in space,
then the transformation matrix [R] can be written as
follows (Angeles, 1997):
[R] = e
[λ]θ
= cos(θ)I + sin(θ)[λ] + [1 – cos(θ)]λλ
T
(7)
where θ is the rotation angle around the unit vector
(axis) λ, and [λ] is a skew-symmetry matrix
generated by the unit vector λ. In fact,
0λλ
λ0λ
λλ0
12
13
23
λ
(8a)
Besides,
e
k
T
[λ]e
k
= 0 (8b)
e
k
T
(λλ
T
)e
k
= λ
T
(e
k
e
k
T
)λ (8c)
λ
T
λ = λ
1
2
+ λ
2
2
+ λ
3
2
= 1 (8d)
Obviously, Eq. (7) can be rewritten as:
[R] = (1 – V
θ
)I + S
θ
[λ] + V
θ
λλ
T
(9)
where V
θ
= 1 – cos(θ), S
θ
= sin(θ), C
θ
= cos(θ).
Consequently, Eq. (6) becomes:
L
k
2
= 2V
θ
– 2V
θ
(λ
T
e
k
)
2
(k = 1, 2, 3) (10)
That is,
2V
θ
[λ
T
(I – e
k
e
k
T
)λ] = L
k
2
(k = 1, 2, 3) (11)
Eq. (11) is symmetrical to λ, that is, if λ is the
solution to Eq. (11), –λ is also the solution.
Furthermore, it is symmetrical to θ, too.
2.3 The Solution
In order to get the final solution of the forward
kinematics, V
θ
is firstly eliminated in Eq. (11). From
Eq. (11), we have
L
3
L
2
L
1
2
a
O
2
b
3
a
1
a
1
b
3
b
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
112

2
T
2
θ
- 1
2V
k
k
e
L
λ
(k = 1, 2, 3)
(12)
So,
2
2
T
2
2
2
1
T
2
1
- 1- 1 ee λλ
LL
(13a)
2
3
T
2
3
2
2
T
2
2
- 1- 1 ee λλ
LL
(13b)
2
1
T
2
1
2
3
T
2
3
- 1- 1 ee λλ
LL
(13c)
That is,
2
2
T2
1
2
1
T2
2
2
1
2
2
ee λλ LLLL
(14a)
2
3
T2
2
2
2
T2
3
2
2
2
3
ee λλ LLLL
(14b)
2
1
T2
3
2
3
T2
1
2
3
2
1
ee λλ LLLL
(14c)
Since λ is a unit vector, that is, Eq. (8d), Eqs. (14a),
(14b) and (14c) have a homogenous form on λ, that
is,
λ
T
W
k
λ = 0 (k = 1, 2, 3) (15)
where
W
1
= L
3
2
e
2
e
2
T
– L
2
2
e
3
e
3
T
– (L
3
2
– L
2
2
)I (16a)
W
2
= L
1
2
e
3
e
3
T
– L
3
2
e
1
e
1
T
– (L
1
2
– L
3
2
)I (16b)
W
3
= L
2
2
e
1
e
1
T
– L
1
2
e
2
e
2
T
– (L
2
2
– L
1
2
)I (16c)
Set
2
3
2
2
2
2
3
2
1
1
and
L
L
t
L
L
t
(17)
Now W
k
(k = 1, 2, 3) can be simplified as:
W
1
= e
2
e
2
T
– t
2
e
3
e
3
T
– (1 – t
2
)I (18a)
W
2
= t
1
e
3
e
3
T
– e
1
e
1
T
– (t
1
– 1)I (18b)
W
3
= t
2
e
1
e
1
T
– t
1
e
2
e
2
T
– (t
2
– t
1
)I (18c)
By defining
3
2
2
1
and
yx
(19)
Eq. (15) becomes:
f
1
(x, y) = [x, y, 1]
T
W
1
[x, y, 1] = 0 (20a)
f
2
(x, y) = [x, y, 1]
T
W
2
[x, y, 1] = 0 (20b)
f
3
(x, y) = [x, y, 1]
T
W
3
[x, y, 1] = 0 (20c)
Among f
1
, f
2
and f
3
, only two of them are
independent and the other one is dependent. Using
any two of them, we can obtain a fourth polynomial
in variable x (or y) as follows:
0
4
0
4
4
3
3
2
210
k
k
k
xcxcxcxcxcc
(21)
Eq. (21) can be solved analytically without
numerical iterations and it has at most four real
roots. Once x and y are found, that is, λ is obtained,
then by Eq. (12), the rotation angle θ can be
obtained:
2
T
2
1-
- 1
0.5
- 1cos θ
k
k
L
eλ
(22)
In Eq. (22), k can be 1 or 2 or 3. However, a
verification for a valid θ for different k (k = 1, 2, 3)
is required since three θ values may not the same. If
the three θ values differ from each other, the
superfluous θ should be discarded. The reason for
the existence of a superfluous θ is that θ is related
with all of the three absolute link lengths L
k
(k = 1,
2, 3) directly while x, y and λ are obtained from the
given t
1
, t
2
(relative values of link lengths) only, as
defined in Eq. (17). Besides, if θ is a real solution,
either is -θ. This is obvious due to the cosine
function in Eq. (11). Now, both λ and θ are known,
from Eq. (7), we can obtain at most eight
transformation matrices R. Four of them are from θ,
and the other four are from –θ, which are actually
the transposes of the respective R from θ.
3 NUMERICAL EXAMPLE
The closed-form forward kinematics (21) and (22)
suggest that at most eight real solutions exist to the 3
DOF congruent spherical parallel robot manipulator.
A numerical example is presented here to show the
above method. The geometric structure data of a 3
DOF congruent spherical parallel robot manipulator
are as follows: e
1
= {0.707107, 0.0, 0.707107}, e
2
=
{-0.353553, 0.612372, 0.707107}, e
3
= {-0.353553,
-0.612372, 0.707107} for the vertex unit vectors of
the two platforms in their own frames, and the link
length ratio are L
1
/a
1
= 1.30, L
2
/a
2
= 1.42, and L
3
/a
3
= 1.44. In this case, the matrices W
1
and W
2
in Eqs.
(18a) and (18b) become:
AnalyticalForwardKinematicstothe3DOFCongruentSphericalParallelRobotManipulator
113

02860.077102.101430.0
77102.103575.088551.0
01430.088551.005005.0
1
W
1918.0731791.04593.1
731791.001735.1365896.0
4593.1365896.044195.0
2
W
So, f
1
and f
2
are:
f
1
= -0.0137924 – 0.0137924x – 0.0241368x
2
+
1.70816y – 0.854081xy – 0.0172405y
2
= 0
f
2
= 0.0924961 – 1.40750x – 0.213132x
2
–
0.705817y + 0.352909xy + 0.490620y
2
= 0
And Eq. (21) is:
0.122476 – 2.11581x + 1.71067x
2
– 0.182711x
3
–
0.0784458x
4
= 0
Finally, its four roots are:
x
1
= -6.40053;
x
2
= 0.060861;
x
3
= 1.890762;
x
4
= 2.119774.
The following table lists all the solutions:
Table 1: Final solutions.
(x, y)
λ
θ
(-6.4005, 0.1274) (-0.9878, 0.0196, 0.1543)
107.141
(0.0609, 0.0088) (0.0607, 0.0088, 0.9981)
157.375
(1.8908, 2.6451) (0.5558, 0.7775, 0.2939)
108.817
(2.1198, -2.8442) (0.5751, -0.7717, 0.2713)
108.467
4 CONCLUSIONS
The forward kinematics of the 3 DOF congruent
spherical parallel robot manipulator was first
represented as three quadric equations of three
parameters, then they were rewritten as an fourth
polynomial in one variable by eliminating the other
two variables, which provides a direct analytical
solution without numerical iterations. A numerical
example was presented to show the method
developed in the paper.
ACKNOWLEDGEMENTS
The authors would like to thank Department of
Industrial and Systems Engineering, The Hong Kong
Polytechnic University for the financial support.
REFERENCES
Angeles, J., 1997. Fundamentals of Robotic Mechanical
Systems, Springer-Verlag, New York.
Bonev, I., Zlatanov, D. and Gosselin, C. M.; 2003.
Singularity Analysis of 3-DOF Planar Parallel
Mechanisms via Screw Theory, Transactions of the
ASME, Journal of Mechanical Design, Vol. 125, pp.
573-581.
Bruyninckx, H., 1998. Closed-form forward position
kinematics for a (3-1-1-1)
2
fully parallel manipulator,
IEEE Transactions on Robotics and Automation, Vol.
14, No. 2, pp. 326-328.
Gosselin, C. M., Sefrioui, J. and Richard, M. J., 1994a. On
the direct kinematics of spherical three-degree-of-
freedom parallel manipulators with coplanar platform,
Transactions of the ASME, Journal of Mechanical
Design, Vol. 116, pp. 587-593.
Gosselin, C. M., Sefrioui, J. and Richard, M. J., 1994b. On
the direct kinematics of spherical three-degree-of-
freedom parallel manipulators of general architecture,
Transactions of the ASME, Journal of Mechanical
Design, Vol. 116, pp. 594-598.
Guo, S., Wang, C., Qu, H., and Fang, Y., 2012. A novel 4-
RRCR parallel mechanism based on screw theory and
its kinematics analysis, Proceedings of the Institution
of Mechanical Engineers, Part C: Journal of
Mechanical Engineering Science, DOI:
10.1177/0954406212469774.
Huang, Z. and Yao, Y. L., 1999. A new closed-from
kinematics of the generalized 3-DOF spherical parallel
manipulator, Robotica, Vol. 17, pp. 475-485.
Innocenti, C. and Parenti-Castelli, V., 1993. Echelon form
solution of direct kinematics for the general fully-
parallel spherical wrist, Mechanism and Machine
Theory, Vol. 28, No. 4, pp. 553-561.
Innocenti, C., 1998. Forward kinematics of a 6-6 fully-
parallel manipulator with congruent base and platform,
Advances in Robot Kinematics: Analysis and Control,
Edited by J. Lenarcic and M. L. Husty, Kluwer
Academic Publishers, pp. 137-146.
Leguay-Durand, S. and Reboulet, C., 1997. Optimal
design of a redundant spherical parallel manipulator,
Robotica, Vol. 15, pp. 399-405.
Li, Y. and Xu, Q., 2007. Kinematic analysis of a 3-PRS
parallel manipulator, Robotics and Computer-
Integrated Manufacturing, Vo. 23, pp. 395-408.
Mavroidis, C., 1997. Method to determine the
displacement Screws Related to the direct kinematics
of parallel mechanisms, Proceedings of the 5th
Applied Mechanisms and Robotics Conference,
Cincinnati, October 12-15.
Mavroidis, C., 1998. Completely specified displacements
of a rigid body and their application in the direct
kinematics of in-parallel mechanisms, Proceedings of
1998 ASME Design Engineering Technical
Conference, Atlanta, GA, September 13-16, Paper No.
DETC98/MECH-5891.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
114

Wohlhart, K., 1994. Displacement analysis of the general
spherical Stewart platform, Mechanism and Machine
Theory, Vol. 29, No. 4, pp. 581-589.
Zhang, Y., Crane III, C. D. and Duffy, J., 1998.
Determination of the unique orientation of two bodies
connected by a ball-and socket joint form four
measured displacement, Journal of Robotic Systems,
Vol. 15, No. 5, pp. 299-308.
AnalyticalForwardKinematicstothe3DOFCongruentSphericalParallelRobotManipulator
115
