
Parametric Fault Detection in Nonlinear Systems
A Recursive Subspace-based Approach
Paulo Gil
1,2
, F
´
abio Santos
3
, Alberto Cardoso
2
and Lu
´
ıs Palma
1
1
Departmento de Engenharia Electrot
´
ecnica, Faculdade de Ci
ˆ
encias e Tecnologia
Universidade Nova de Lisboa, 2829-516 Caparica, Portugal
2
CISUC, Informatics Engineering Department, University of Coimbra, P
´
olo II, 3030-290 Coimbra, Portugal
3
Visteon Corporation Ltd, Electronics Product Group, 2951-503 Palmela, Portugal
Keywords:
Model-based Fault Detection, Parametric Faults, Subspace System Identification, Recursive Parameters
Estimation, Neural Networks.
Abstract:
This paper deals with the problem of detecting nolinear systems’ parametric faults modeled as changes in
the eigenvalues of a local linear state-space model. The linear state-space model approximations are ob-
tained by recursive subspace system identification techniques, from which the eigenvalues are extracted at
each sampling time. Residuals are generated by comparing the eigenvalues against those associated with a
local nominal model derived from a neural network predictor describing the nonlinear plant dynamics in free
fault conditions. Parametric fault symptoms are generated from the eigenvalues residuals, whenever a given
predefined threshold is exceeded. The feasibility and effectiveness of the proposed framework is demonstrated
in a practical case study.
1 INTRODUCTION
Fault Detection and Isolation (FDI) consists of mak-
ing a binary decision concerning a malfunctioning hy-
pothesis, and in case of a given fault event to de-
termine its nature and location (Isermann and Ball
´
e,
1997), (Isermann, 2011). In general, FDI frame-
works incorporate the concept of redundancy, ei-
ther in terms of hardware or analytical. While
the former approaches rely essentially on duplica-
tive signals provided by additional hardware, the an-
alytical or software redundancy uses a mathemati-
cal model of the plant along with dedicated esti-
mation methods (Hwang et al., 2010). Since this
methodology normally does not require additional
hardware it is usually more cost effective. How-
ever, this approach is more challenging owing to the
need of coping with model uncertainties, noise and
unknown/unmeasurable disturbances that ultimately
distorts the computed residuals and may lead to a mis-
classification of symptoms.
Model-based fault detection and diagnosis meth-
ods use residuals between the plant and a mathemat-
ical model prediction in conjunction with a classifier
or voter that, according to the residuals’ magnitude
and additional features, generates an alarm and pro-
vides information regarding the detected symptom.
Concerning residual generation methods, they can
be implemented based on state and output observers
(Chen and Patton, 1999), parity relations (Gertler,
1998) or on parameters estimation using system iden-
tification techniques (Isermann, 1997), (Brito Palma
et al., 2005).
For a number of applications the FDI problem of
interest is to detect changes in the eigenstructure of
linear dynamic systems, being the structural vibration
monitoring a typical example. A straightforward ap-
proach relies on subspace-based linear system iden-
tification (see e.g. (Moor et al., 1999)). In (Bas-
seville et al., 2000) subspace-based methods along
with the statistical local approach have been anal-
ysed in the context of designing fault detection al-
gorithms and suggested to be useful for in-operation
modal analysis and monitoring of mechanical struc-
tures subject to vibration, while in (Basseville et al.,
2007) it is presented an overview of theory and prac-
tice of covariance-driven input/output and output only
subspace-based algorithms for structural identifica-
tion, damage detection and diagnosis, and sensor data
fusion.
In the preceding FDI works it is assumed that
the underlying system under monitoring is linear and
time-invariant. In the case of nonlinear systems these
methods are doomed to fail as a result of unreliable
82
Gil P., Santos F., Cardoso A. and Palma L..
Parametric Fault Detection in Nonlinear Systems - A Recursive Subspace-based Approach.
DOI: 10.5220/0004422100820088
In Proceedings of the 10th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2013), pages 82-88
ISBN: 978-989-8565-70-9
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

residuals due to the cumulative effect of model-plant
mismatch.
The main contribution of this work is to develop
a new framework to detect parametric faults in non-
linear dynamic systems, modelled as changes in the
internal system dynamics, by taking advantages of
recursive subspace-based system identification tech-
niques, and the approximation capabilities of nonlin-
ear autoregressive with exogenous inputs Nonlinear
Autoregressive with Exogenous Inputs (NARX) neu-
ral networks. By assuming the input-output certainty
equivalence principle, the approach first computes the
residuals of the underlying local eigenstructures. Sub-
sequently, by analysing these residuals, the change
detection module evaluates whether a parametric fault
has occurred.
2 SYSTEM IDENTIFICATION
In the context of fault detection and isolation a model
of the plant under normal or nominal operating condi-
tions is obtained by regression, upon selecting a par-
ticular model structure and a parametrization. When a
given fault affects the system it is most likely that the
system’s behaviour, in terms of outputs, inputs or in-
ternal dynamics, would differ from the behaviour pre-
dicted by the nominal operating model. This means
that fault events will be reflected in a change of the
models’ parameters. It is exactly this basic assump-
tion that most model-based identification methods for
FDI consider in order to detecting and isolating faults
based on residual signals.
Among possible model structures to approximate
the input-output behaviour of the plant, the present
work considers linear state-space system models and
NARX neural networks, with the choice of these
model structures dictated by the nature of the pro-
posed FDI framework. In the case of linear state-
space model-based identification the underlying ma-
trices are estimated by considering recursive subspace
techniques, while for NARX neural network predic-
tors their training is carried out offline using an itera-
tive optimization procedure.
2.1 Recursive Subspace Identification
2.1.1 Preliminaries
In the case of offline SID methods it is implicitly as-
sumed that a sequence of input-output data collected
from the plant is available, that is,
U
N
=
{
u(0), u(1), . . . , u(N −1)
}
Y
N
=
{
y(1), y(2), . . . , y(N)
}
(1)
In order to come up with estimates for the state-space
matrices (A, B,C, D) (up to within a similarity trans-
formation (Merc
`
ere, 2005)) and error covariance ma-
trices (Q, R, S) the estimation data are organized un-
der the form of past and future block Hankel matrices.
In what the input sequence is concerned, these block
Hankel matrices take the following form:
U
p
=
u(0) u(1) ··· u ( j −1)
u(1) u(2) ··· u( j)
.
.
.
.
.
.
.
.
.
.
.
.
u(i −1) u(i) ··· u (i + j −2)
(2)
U
f
=
u(i) u(i + 1) ··· u(i + j −1)
u(i + 1) u(i + 2) ··· u(i + j)
.
.
.
.
.
.
.
.
.
.
.
.
u(2i −1) u(2i) ··· u (2i + j −2)
(3)
and the past and future output block Hankel matrices,
Y
p
≡Y
0|i−1
and Y
f
≡Y
i|2i−1
given according to,
Y
p
=
y(0) y(1) ··· y ( j −1)
y(1) y(2) ··· y( j)
.
.
.
.
.
.
.
.
.
.
.
.
y(i −1) y(i) ··· y (i + j −2)
(4)
Y
f
=
y(i) y(i + 1) ··· y(i + j −1)
y(i + 1) y(i + 2) ··· y(i + j)
.
.
.
.
.
.
.
.
.
.
.
.
y(2i −1) y(2i) ··· y (2i + j −2)
(5)
The block Hankel matrices of the stochastic subsys-
tem, built in with the outputs y
s
(k), the process noise
ω(k) and the measurement noise υ(k) are defined as
above, namely, (Y
s
p
, Y
s
f
), (M
s
p
, M
s
f
) and (N
s
p
, N
s
f
), re-
spectively.
The past and future state vector sequence, respec-
tively, X
p
and X
f
take the following form:
X
p
=
x (0), x(1) , ··· x( j −1)
X
f
=
x (i), x(i + 1) , ··· x (i + j −1)
(6)
while the Toeplitz matrices associated with the deter-
ministic and the stochastic subsystems are given by:
H
d
i
=
D 0 0 ··· 0
CB D 0 ··· 0
CAB CB D ··· 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
CA
i−2
B CA
i−3
B CA
i−4
B ··· D
(7)
ParametricFaultDetectioninNonlinearSystems-ARecursiveSubspace-basedApproach
83

H
s
i
=
0 0 0 ··· 0
C 0 0 ··· 0
CA CB 0 ··· 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
CA
i−2
CA
i−3
CA
i−4
··· 0
(8)
The extended observability matrix associated with the
deterministic system is given by:
Γ
i
=
C
CA
CA
2
.
.
.
CA
i−1
(9)
The following input-output matrix equations play
a fundamental role in subspace identification (Bart
De Moor, 1999):
Y
p
= Γ
i
X
d
p
+ H
d
i
U
p
+Y
s
p
Y
f
= Γ
i
X
d
f
+ H
d
i
U
f
+Y
s
f
Y
s
p
= Γ
i
X
s
p
+ H
s
i
M
p
+ N
p
Y
s
f
= Γ
i
X
s
f
+ H
s
i
M
f
+ N
f
(10)
2.1.2 Recursive Algorithm
The algorithm implemented in this work comprises
two main stages: i) Online updating of the observa-
tion vector, using the QR factorization, along with
Givens rotations (see e.g. (Oku and Kimura, 2002),
(Merc
`
ere et al., 2004)) , and ii) Recursive estimation
of the extended observability matrix, considering the
online updating of the propagator.
i) QR Factorization Updating
Consider the following decomposition:
U
p
Ψ
Y
p
=
R
11
0 0
R
21
R
22
0
R
31
R
32
R
33
Q
1
Q
2
Q
3
(11)
with Ψ the instrumental variable comprising past in-
puts and outputs, such that lim
j→∞
1
J
Θ
i
Ψ
T
= 0, Θ
i
=
H
s
i
M
f
+ N
f
and rank
XΨ
T
= n. In such conditions
the following expression holds:
lim
j→∞
1
√
j
R
32
Q
2
= lim
j→∞
1
√
j
Γ
i
X (12)
The procedure for updating the QR factorization with
the next data pair {u(τ), y(τ)} is as follows:
√
λ
R
11
0 0
R
21
R
22
0
R
31
R
32
R
33
u
i
(τ + 1)
ψ(τ + 1)
y
i
(τ + 1)
Q
1
(τ) 0
Q
2
(τ) 0
0 1
(13)
with λ ∈ R
+
a forgetting factor considered to weight
past information.
Now, by applying two sequences of Givens rota-
tions in (13) the factor R in the QR decomposition
is converted into the following block lower triangular
matrix:
√
λ
R
11
0 0
R
21
R
22
0
R
31
R
32
R
33
u
i
(τ + 1)
ψ(τ + 1)
y
i
(τ + 1)
rot
G
1
(τ + 1) ·rot
G
2
(τ + 1) =
=
R
11
(τ + 1) 0 0 0
R
21
(τ + 1)
√
λR
22
(τ) 0
ˇ
ψ(τ + 1)
R
31
(τ + 1)
√
λR
32
(τ)
√
λR
33
(τ) ˇz(τ + 1)
rot
G
2
(τ + 1) =
=
R
11
(τ + 1) 0 0 0
R
21
(τ + 1) R
22
(τ + 1) 0 0
R
31
(τ + 1) R
32
(τ + 1)
√
λR
33
(τ)
ˇ
ˇz
i
(τ + 1)
(14)
with
ˇ
ψ and ˇz vectors obtained after applying the first
Givens rotation, and accounting for the information
included in u
i
, while
ˇ
ˇz is the vector obtained after the
second Givens rotation in order to include the infor-
mation embedded in
ˇ
ψ.
Taking into account (12) it follows that,
E
ˇz
i
ˇz
T
i
−
ˇ
ˇz
i
ˇ
ˇz
T
i
= Γ
i
R
x
Γ
T
i
(15)
Equation (15) shows that (14) leads asymptotically to
a given covariance matrix R
z
i
, from which the sub-
space spanned by the columns of the extended observ-
ability can consistently be extracted. The procedure
of recursively updating this covariance matrix is pre-
sented in the following equation:
˜
R
z
i
(k) = λ
ˆ
R
f
i
(k −1) + ˇz
i
(k) ˇz
T
i
(k) −
ˇ
ˇz
i
(k)
ˇ
ˇz
T
i
(k)
(16)
ii) Extended observability subspace basis updating
The process followed in this work for updating a
given basis for the extended observability matrix re-
lies on the propagator method (Munier and Delisle,
1991). This method has the advantage of enabling its
use in the context of coloured unknown disturbances.
Assume that the pair (A,C) is observable and the
system’s order n is known in advanced. Then, it is
possible to derive a given permutation matrix S ∈
R
li×li
such that the extended observability Γ
i
can be
decomposed in two blocks:
SΓ
i
=
Γ
i
1
∈ R
n×n
Γ
i
2
∈ R
(li−n)×n
(17)
Taking into account the propagator operator, (17) can
rewritten as,
SΓ
i
=
I
n
P
T
i
Γ
f
1
(18)
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
84

Now, by replacing (18) into (15) it follows that
R
z
i
=
I
n
P
T
i
R
¯x
I
n
P
i
(19)
which can be rewitten as,
R
z
i
=
R
ˇz
i
1
−R
ˇ
ˇz
i
1
R
ˇz
i
1
ˇz
i
2
−R
ˇ
ˇz
i
1
ˇ
ˇz
i
2
R
ˇz
i
2
ˇz
i
1
−R
ˇ
ˇz
i
2
ˇ
ˇz
i
1
R
ˇz
i
2
−R
ˇ
ˇz
i
2
!
=
R
¯x
R
¯x
P
i
P
T
i
R
¯x
P
T
i
R
¯x
P
i
(20)
Equation (20) shows that the propagator can be found
by minimizing the following Frobenius norm:
J (P
i
) =
ˆ
R
ˇz
i
2
ˇz
i
1
−
ˆ
R
ˇ
ˇz
i
2
ˇ
ˇz
i
1
−P
T
i
ˆ
R
ˇz
i
1
−
ˆ
R
ˇ
ˇz
i
1
2
F
(21)
In the case of all the involved matrices are nonsin-
gular (see (Merc
`
ere and Lovera, 2007)) the argument
of minimizing Eq. (21) is given by (Merc
`
ere et al.,
2008):
ˆ
P
T
i
=
ˆ
R
ˇz
i
2
ˇz
i
1
−
ˆ
R
ˇ
ˇz
i
2
ˇ
ˇz
i
1
ˆ
R
ˇz
i
1
−
ˆ
R
ˇ
ˇz
i
1
−1
(22)
This optimal solution can be recursively updated by
means of a Recursive Least Squares (RLS) algorithm.
iii) Estimation of State-space Matrices
Since recursive subspace identification methods as-
sume that the vectorial basis dimension is known in
advanced the computation of estimates for the state-
space matrices is readily obtained from the extended
observability matrix and input-output data. For matri-
ces A and C the corresponding estimates are obtained
as follows:
ˆ
C =
ˆ
Γ
i
(1 : l, :)
ˆ
A =
ˆ
Γ
i
(1 : l (i −1) , :)
†
ˆ
Γ
i
(l + 1 : li, :)
(23)
with
ˆ
Γ
i
=
I
n
ˆ
P
i
T
.
Concerning B and D estimates, they are found by
means of a least squares estimator applied to the ele-
ments of ζ(B, D) defined as (dos Santos and de Car-
valho, 2003):
ζ(B, D) =
B
ˆ
Γ
†
i−1
H
d
i−1
D 0
−
ˆ
A
ˆ
C
ˆ
Γ
†
i
H
d
i
(24)
2.2 Neural Network Predictor
Multilayer perceptrons comprising one hidden layer
are universal approximators, that is, they are able to
approximate any nonlinear function with any desired
accuracy provided that some particular conditions are
held (see e.g. (Leshno et al., 1993), (Chen et al.,
1995)).
An important subclass of multilayer perceptrons,
quite appealing in the context of nonlinear control and
identification, is the NARX neural networks, whose
input vector consists of past inputs and past outputs
(the regressor). This architecture can be analytically
represented as follows:
y
net
(k) = g (ϕ(k), θ)
(25)
with θ the neural network parameters vector consist-
ing of weights and biases, and the regressor ϕ (k)
given by:
ϕ
T
(k) =(y (k −1), . . . , y(k −n
y
),
u(k −1) , . . . , u (k −n
u
))
(26)
where u(k) and y(k) denoting the system’s input and
output, n
u
and n
y
the lag windows for past inputs and
outputs, and g(·) a nonlinear mapping performed by
the NARX neural network. This input-output rela-
tionship can be rewritten as follows:
Regarding the activation functions of neurons in-
cluded in the output layer, they are all linear, while the
nonlinear activation functions σ(·) associated with
hidden layer neurons are chosen as continuous and
differentiable sigmoidal functions, upper and lower
bounded, satisfying the following conditions (Dong
et al., 2002):
• lim
t→±∞
σ(t) = ±1;
• σ(t) = 0 ⇐t = 0;
• σ
0
(t) > 0;
• lim
t→±∞
σ
0
(t) = 0;
• max
σ
0
(t)
≤ 1 ⇐ t = 0.
For the number of neurons to be incorporated
within each layer, only those associated with the out-
put layer are directly related to the number of out-
puts of the system. Concerning the hidden and input
layers, the number of neurons should be carefully se-
lected in order to enable the neural predictor to gen-
eralize well to unseen data, while presenting the min-
imal structural complexity. As such, there is a trade-
off between structural complexity and generalization
capability.
In the case of a three-layer NARX(N
u
, N
h
, N
o
)
neural network, where N
u
, N
h
and N
o
, are respec-
tively, the number of input layer, hidden layer and out-
put layer neurons, with sigmoid activation functions
in the hidden layer and linear activation functions in
ParametricFaultDetectioninNonlinearSystems-ARecursiveSubspace-basedApproach
85
the remaining two layers, the corresponding output is
given by,
y
net
(k) = W
2
σ(W
1
·ϕ(k) + b
1
) + b
2
(27)
with W
1
∈ R
N
h
×N
u
, W
2
∈ R
N
o
×N
h
, b
1
∈ R
N
h
, b
2
∈ R
N
o
and the regressor vector given by (26).
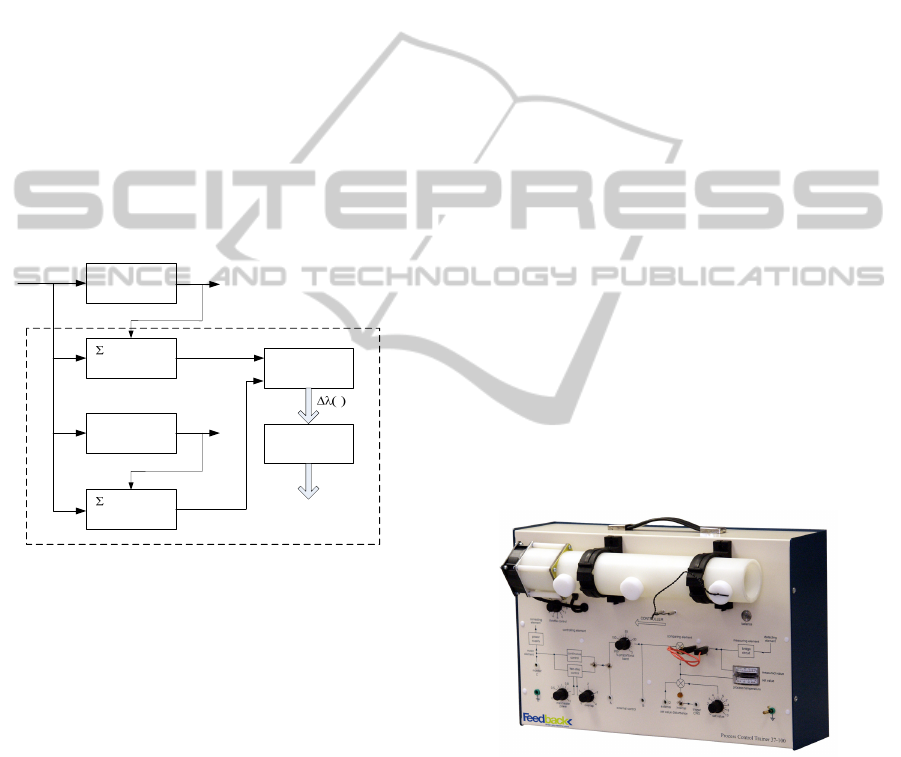
3 ARCHITECTURE
The framework for detecting parametric faults in non-
linear dynamic systems is based on comparing the
eigenstructure of two linear state-space realizations,
one for the nonlinear system under monitoring and
the other for the NARX neural network predictor. The
neural predictor was previously trained offline with an
informative enough dataset collected from the nonlin-
ear system in a fault-free context.
Process
P
(A,B,C,D)
Estimator
Neural
Network
m
(A,B,C,D)
Estimator
A
p
(k)
Residual
Generation
Decision
Making
Fault
Fault Detection
u(k)
k
y(k)
y
net
(k)
A
m
(k)
Figure 1: Parametric fault detection architecture.
Basically, the architecture (see Fig. 1) consists
of a linear state-space identification module that es-
timates, through recursive subspace system identifi-
cation techniques, local linear system matrices asso-
ciated with both the plant and the NARX neural net-
work predictor. Additionally, the platform includes
a residual generator module that computes, at each
discrete time k, and based on the eigenvalues of the
system matrices A
p
(k) and A
m
(k) a residual vector
∆λ(k) given by:
∆λ(k) =
|
λ
p
(k) −λ
m
(k)
|
(28)
with
|
·
|
the element-wise absolute value operator.
The residuals ∆λ (k) are subsequently analysed in
the decision making module, which uses statistical
tools in order to test whether they have “significantly”
deviated from zero. In particular, the decision crite-
rion is based on a threshold computed offline based on
the three-sigma limits approach (Montgomery, 2001).
If a residual exceeds the computed threshold the sys-
tem is considered in faulty operation and some ef-
fective measures should be taken to accommodate its
effects. Finally, it should be mentioned that fault
accommodation techniques are not the focus of this
work.
4 CASE STUDY
In this section the proposed approach for detecting
parametric faults in nonlinear dynamic systems is ex-
perimentally tested and validated using a laboratory
test-bed.
4.1 Test-bed
The test-bed consists of a heating system from
Feedback
R
, namely, the Process Trainer PCT 37-100
(Fig. 2). It comprises a variable-speed axial fan ad-
justed manually via a potentiometer, which circulates
an air-stream along a polypropylene tube. The airflow
rate is heated by means of a heating element under the
form of a grid with a maximum power of 80 W for an
input voltage of +10 V controlled by a thyristor cir-
cuit. A thermistor detector is included in the set-up
for sensing the temperature at one of the three avail-
able measurement points along the tube length.
The Process Control Trainer comprises a
heating element controlled by a thyristor
circuit which feeds heat into an airstream
circulated by an axial fan along a
polypropylene tube. A thermistor detector,
which may be placed at one of three
points along the tube length, senses the
temperature at that point.
The volume of air flow is controlled by
varying the speed of the fan.
Features
• A practical process in miniature
• Closed and open-loop continu-
ous control as well as two-step
control
• Fast response times
• Thermal time constants and time
transport lag
• Easy-to-read metering
Subject Areas
• Distance/Velocity Lag
• Transfer Lag
• Calibration
• Two-step Control
• Proportional Control System
Response
• Frequency Response
A comparison of these signals generates
a deviation signal which is applied to
the heater control circuit such that the
controlled condition is maintained at the
desired value. Two step (ON/OFF) and
Proportional band control is standard.
A change in setting represents a
supply side disturbance and the
effects are easily demonstrated.
The detector output is amplified to
provide both an indication of the
measured temperature and a feedback
signal for comparison with a set value
derived from a separate control.
Process
Control
37-100 SYSTEM
Process Control Trainer
Figure 2: Feedback
R
Process Trainer PCT 37-100.
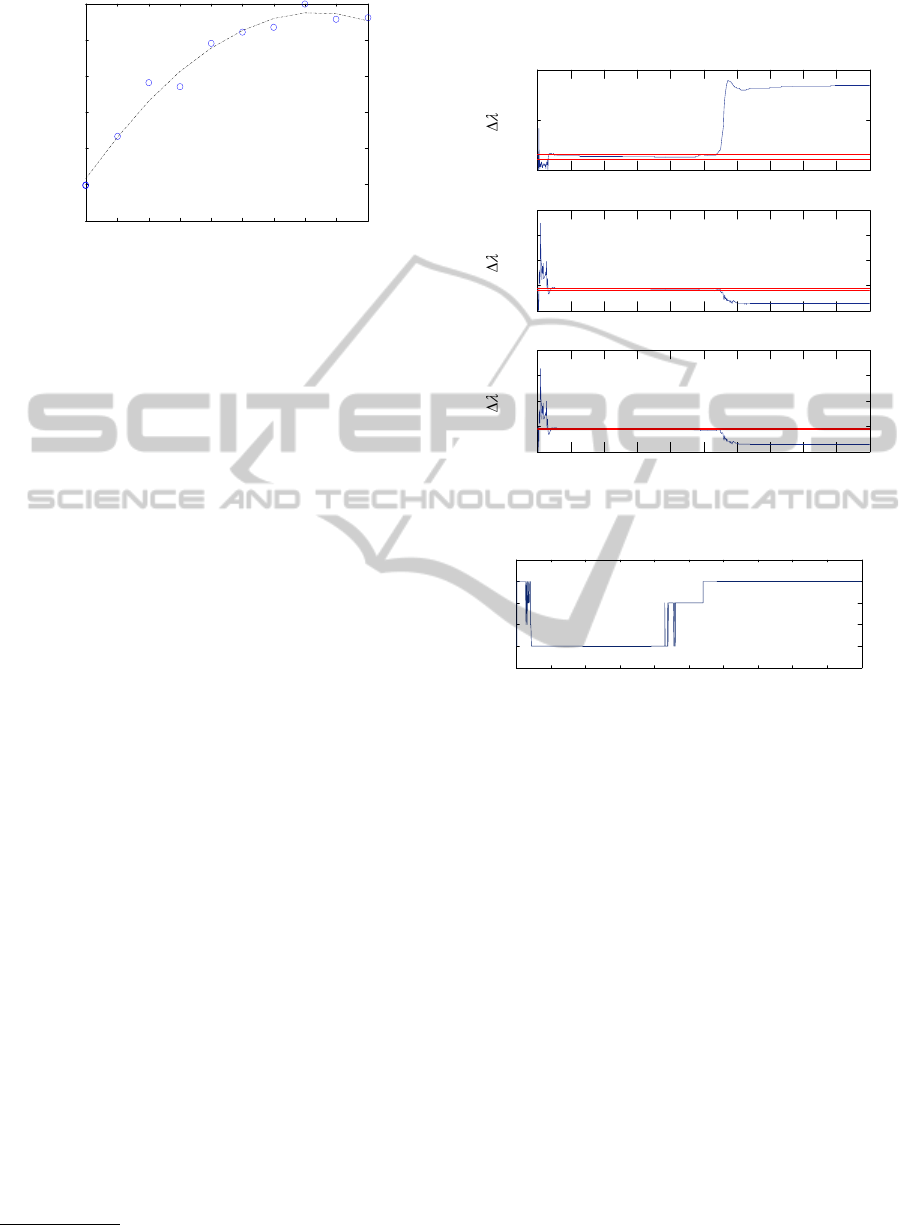
This setup represents a nonlinear time-varying
system, where the main source of nonlinearities are
associated with the input dependent static gain, while
the time variant behavior is essentially due to thermal
energy storage in the course of experiments. As can
be observed in Fig. 3, which shows the normalized
static gain as a function of the normalized input fed
to the system, the systems static gain varies with the
operation regime.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
86
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0.7
0.8
0.9
1
Normalized input
Normalized static gain
Figure 3: Feedback
R
Process Trainer PCT 37-100 static
gain.
The communication infrastructure between the
digital computer, where the fault detection platform
is installed, and the process trainer PCT 37-100 con-
sists of a peer-to-peer interconnection based on a data
acquisition board PMD-1208LS series, from the Mea-
surement Computing
R
. This device includes two 10-
bit analog outputs, 8 single-ended or 4 differential
analog inputs, and 16 digital I/O
1
.
4.2 Experiment
The experiment shown here was carried out consid-
ering the following nominal configuration: fan speed
referred to the potentiometer’s position 5, tempera-
ture sensor located at position II (140 mm from the
heater grid), and a sampling interval of 10 ms. Re-
garding the linear state-space models’ complexity,
for Σ
p
= (A
p
, B
p
,C
p
, D
p
) and Σ
m
= (A
m
, B
m
,C
m
, D
m
),
they were both chosen to be of 3
rd
order, as sug-
gested by the offline subspace algorithm. Regarding
the three-layered NARX neural network consisted of
four neurons in the input layer, seven neurons in the
hidden layer and one neuron in the output layer, while
the input to the network u
net
was represented by an ar-
ray of four elements, namely:
u
net
(k) = [u (k −1) u (k −2) y (k −1) y (k −2)]
T
(29)
In the experiment run the system’s fan potentiometer
was initially at position 5 and, subsequently, at sam-
ple 420, the fan speed was manually changed to 1.
This change resulted in a major air flow rate reduc-
tion, which impacted the static gain and pure delay
of the system. Fig. 4 shows the three residuals over
time, computed from the eigenvalues of Σ
p
and Σ
m
,
and the experimental threshold associated with each
residual, while in Fig. 5 it is presented the number
1
see http://www.mccdaq.com.
of symptoms (out of three) corresponding to residuals
outside the thresholds.
0 100 200 300 400 500 600 700 800 9001000
0
0.05
0.1
0
0.1
0.2
0.3
0.4
0
0.1
0.2
0.3
0.4
Sample
0 100 200 300 400 500 600 700 800 9001000
0 100 200 300 400 500 600 700 800 9001000
Sample
Sample
123
Figure 4: Parametric fault - residuals and thresholds.
0
1
2
3
Symptoms
Sample
0 100 200 300 400 500 600 700 800 900 1000
Figure 5: Parametric fault - symptoms.
As can be observed in Fig. 5 at the beginning of
the experiment run, even still with no fault injected
on the system, the fault detection platform generates
unexpected symptoms. This behaviour is due to the
initialization of the subspace recursive estimation al-
gorithm, which in the initial phase is responsible for
residuals outside experimental thresholds. After this
initial time frame, the number of symptoms stabilizes
at zero, which is in line with the presence of no para-
metric fault acting on the system. With the fault in-
jected at sample 420 the system dynamics underwent
a noticeable change, which should be reflected in the
linear adaptive model of the process, and ultimately
be expressed by residuals lying outside the thresholds.
5 CONCLUSIONS
This paper addressed the problem of nonlinear para-
metric fault detection in nonlinear dynamic systems.
ParametricFaultDetectioninNonlinearSystems-ARecursiveSubspace-basedApproach
87

The proposed framework is based on recursive sub-
space system identification techniques to generate
fault dependent symptoms from eigenvalues residu-
als. The parametric fault detection architecture was
tested on a nonlinear plant whose results demonstrate
the feasibility of the proposed approach in detecting
parametric faults.
ACKNOWLEDGEMENTS
This work has been supported by iCIS-Intelligent
Computing in the Internet of Services, Project
CENTRO-07-ST24-FEDER-002003.
REFERENCES
Bart De Moor, Peter Van Overschee, W. F. (1999). Algo-
rithms for subspace state space system identification
- an overview. In Datta, B. N., editor, Applied and
Computational Control, Signals and Circuits: Volume
1: Vol 1, volume Vol. 1. Birkhauser.
Basseville, M., Abdelghani, M., and Benveniste, A. (2000).
Subspace-based fault detection algorithms for vibra-
tion monitoring. Automatica, 36(1):101 – 109.
Basseville, M., Benveniste, A., Goursat, M., and Mevel,
L. (2007). Subspace-based algorithms for struc-
tural identification, damage detection, and sensor
data fusion. EURASIP J. Appl. Signal Process.,
2007(1):200–200.
Brito Palma, L., Coito, F., and Neves da Silva, R. (2005).
Diagnosis of parametric faults based on identification
and statistical methods. In Decision and Control, 2005
and 2005 European Control Conference. CDC-ECC
’05. 44th IEEE Conference on, pages 3838 – 3843.
Chen, J. and Patton, R. (1999). Robust Model-Based Fault
Diagnosis for Dynamic Systems. Kluwer Academic
Publishers.
Chen, T., Chen, H., and wen Liu, R. (1995). Approxi-
mation capability in c(r macr;n) by multilayer feed-
forward networks and related problems. Neural Net-
works, IEEE Transactions on, 6(1):25 –30.
Dong, Q., Matsui, K., and Huang, X. (2002). Existence and
stability of periodic solutions for hopfield neural net-
work equations with periodic input. Nonlinear Analy-
sis: Theory, Methods & Applications, 49(4):471 479.
dos Santos, P. and de Carvalho, J. (2003). Improving the
numerical efficiency of the b and d estimates pro-
duced by the combined deterministic-stochastic sub-
space identification algorithms. In Decision and Con-
trol, 2003. Proceedings. 42nd IEEE Conference on,
volume 4, pages 3473 – 3478 vol.4.
Gertler, J. (1998). Fault Detection and Diagnosis in Engi-
neering Systems. Marcel Dekker.
Hwang, I., Kim, S., Kim, Y., and Seah, C. (2010). A survey
of fault detection, isolation, and reconfiguration meth-
ods. Control Systems Technology, IEEE Transactions
on, 18(3):636 –653.
Isermann, R. (1997). Supervision, fault-detection and fault-
diagnosis methods: An introduction. Control Engi-
neering Practice, 5(5):639 – 652.
Isermann, R. (2011). Fault-Diagnosis Applications.
Springer-Verlag.
Isermann, R. and Ball
´
e, P. (1997). Trends in the applica-
tion of model-based fault detection and diagnosis of
technical processes. Control Engineering Practice,
5(5):709 – 719.
Leshno, M., Lin, V. Y., Pinkus, A., and Schocken, S. (1993).
Multilayer feedforward networks with a nonpolyno-
mial activation function can approximate any func-
tion. Neural Networks, 6(6):861 – 867.
Merc
`
ere, G. (2005). Contribution
`
a l’identification
r
´
ecursive des syst
`
emes par l’approche des sous-
espaces (in French). PhD thesis, Universit
´
e des Sci-
ences et Technologie de Lille, France.
Merc
`
ere, G., Bako, L., and Lecœuche, S. (2008).
Propagator-based methods for recursive subspace
model identification. Signal Processing, 88(3):468–
491.
Merc
`
ere, G., Lecœuche, S., and Lovera, M. (2004). Re-
cursive subspace identification based on instrumental
variable unconstrained quadratic optimization. Inter-
national Journal of Adaptive Control and Signal Pro-
cessing, 18(9-10):771–797.
Merc
`
ere, G. and Lovera, M. (2007). Convergence analysis
of instrumental variable recursive subspace identifica-
tion algorithms. Automatica, 43(8):1377 – 1386.
Montgomery, D. C. (2001). Introduction to Statistical Qual-
ity. John Wiley & Sons.
Moor, B. D., Overschee, P., and Favoreel, W. (1999). Al-
gorithms for subspace state-space identification: An
overview. In Datta, B. N., editor, Applied and compu-
tational control, signals, and circuits, volume 1, chap-
ter 6, pages 247 – 311. Birkhuser.
Munier, J. and Delisle, G. (1991). Spatial analysis using
new properties of the cross-spectral matrix. Signal
Processing, IEEE Transactions on, 39(3):746 –749.
Oku, H. and Kimura, H. (2002). Recursive 4sid algorithms
using gradient type subspace tracking. Automatica,
38(6):1035 – 1043.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
88
