
Viability Study on Supervisory Control for a Solar Powered Train
Beatriz F
´
eria and Jo
˜
ao Sequeira
Instituto Superior T
´
ecnico/Institute for Systems and Robotics, Lisbon, Portugal
Keywords:
Solar Powered Train, Petri Nets, Supervisory Control, Energy Management System.
Abstract:
This paper addresses the design and simulation of a control system for a solar powered train. An intelligent
control approach using Petri nets is followed aiming at managing the energy consumption such that the train
always reaches its destination. The system uses a priori information on the topology of the line, including
length and slopes, locations of the intermediate stations, and also on the dynamics of the train, current solar
irradiance and weather forecasting, and passenger weight, to determine bounds on the train velocity profile.
The whole system was simulated integrating Petri nets in a Matlab/Simulink environment.
1 INTRODUCTION
This paper describes ongoing work under the frame-
work of project Helianto (see (Helianto, 2013)) aim-
ing at designing a multi-purpose solar powered light
train. The paper describes a simulation environment
built to assess the viability of the project.
The Helianto solar train is an autonomous vehi-
cle, powered exclusively by solar energy and batter-
ies. This makes it attractive for touristic purposes,
connecting urban centers and environmentally sensi-
tive areas. The train is equipped with an array of so-
lar panels that can adjust their orientation in order to
maximize the solar energy captured. The batteries on-
board are recharged from the electric grid, whenever
the train stops at a station, and using energy regener-
ated from braking.
Energy management systems have been exten-
sively studied in a multitude of applications (Godoy
Simaes et al., 1998; Jinrui et al., 2006). Route topol-
ogy, predicted meteorological conditions and forces
opposing the motion, gravity, rolling resistance and
aerodynamic drag are examples on relevant condi-
tions for project design, (Godoy Simaes et al., 1998)
In order to develop the energy management system,
all the components dealing with energy onboard the
train and even those located on the outside, namely at
the stations and along the railway line have to be mod-
eled realistically. In the Helianto project, the over-
all system is modeled through discrete events sys-
tems (DES). DES have an elegant representation in
the form of Petri nets, for which there are available
powerful analysis tools (Moody et al., 1994; Davidra-
juh, 2008; G. Cassandras and Lafortune, 2008) and
for which supervisory controller design techniques al-
low an easy inclusion of constraints found in this type
of application. In a sense,this is also resource man-
agement problem and Petri nets are reference tools to
this class of problems, (Bogdan et al., 2006).
This paper is organized as follows. Sections 2 and
3 discuss some of the modeling options and simula-
tion tools. Section 4 presents a Petri net model of the
overall system, with the corresponding supervisory
controller being described in Section 5. Simulation
results are discussed in Section 6 and the conclusions
of the paper are presented in Section 7.
2 INFRASTRUCTURE
The topology of the line and the placement of the
stations placed along the line are assumed a priori
known. The train uses GPS and the information on
the topology of the line, eventually with a selection
of landmarks placed along the line. Standard robotic
sensors, e.g., laser range finders, can be used to detect
obstacles. Also, an internet connection can be used
to access short-term weather forecast services for the
region where the train is operating, if available.
Each station can be equipped with a gate through
which the passengers must go through to access the
train. The gate system keeps count on how many peo-
ple are in the station ready to board the train. More-
over, weight sensors at the gate floor allow to estimate
the total weight to board the train at each station.
423
Féria B. and Sequeira J..
Viability Study on Supervisory Control for a Solar Powered Train.
DOI: 10.5220/0004422404230430
In Proceedings of the 3rd International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH-2013),
pages 423-430
ISBN: 978-989-8565-69-3
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

Given a time schedule for the train, specifying the
arrival and departure times at each station, the goal
of the supervisory controller is to generate a velocity
profile reference such that (i) the train complies with
the schedule, even in presence of abnormal events,
(ii) the use of energy from the battery set is mini-
mized, and (iii) the velocity and acceleration are al-
ways within operational limits defined by passenger
comfort requirements. In case is not possible to find a
solution the train must not start moving.
Figure 1: Block diagram of the overall system.
Figure 1 presents the block diagram for the global
system.
Since it is a low-speed train, skidding is neglected
and thus the dead-reckoning estimate can be fused,
in the ”Location Tracking” block, with GPS and
landmark information using standard Kalman filter-
ing techniques.
Once a reference velocity is generated by the cor-
responding block, the ”Vehicle” block communicates
to the ”Motor” block the necessary torque which in
turn generates the mechanical power required to move
the train.
The batteries are kept at all times within an admis-
sible range by the ”Battery charging control” block .
In case a minimum charge value is reached the block
prevents further discharging and signals the system
that the battery needs to be charged at the next sta-
tion.
3 SIMULATION ENVIRONMENT
The simulation tool was developed under the
Simulink environment with the toolboxes QSS, (QSS,
2008), to model the dynamics of the train, and Netlab,
(Netlab, 2008), to construct a Petri net model of the
system.
Netlab allows the design and graphical simulation
of Petri Nets and can also interface Matlab/Simulink.
Simulink imports a Netlab net as a single block. The
exchange of data between the Petri net and the rest
of the environment is reduced to the marking in input
and output places.
Figure 2: Netlab symbols for Petri nets.
Figure 2 illustrates the Netlab symbols used in the
Petri nets. Supervisory control is then applied to the
overall system through the Petri net block, establish-
ing a direct, real-time, communication with Simulink.
The QSS toolbox simulates the behavior of a vehi-
cle, motor and energy source, for given velocity and
acceleration profiles, accounting, among others, for
weight, wheel diameter, frontal area, friction and drag
coefficients, and motor inertia. The velocity and ac-
celeration profile is calculated based on information
from the location tracking block, panels, and sensors.
The track gradient profile is defined based on track
topology and location tracking block. These inputs
are assumed to be constant during each time interval,
which for the purpose of this work was set to 1 sec-
ond. At each step the torque required for the vehicle
to follow the specified velocity profile is calculated,
together with the necessary energy.
4 PETRI NET MODEL
4.1 Train
Figure 3a shows the Petri net modeling this subsys-
tem. The main states are represented by places. A
single token is passed on from place to place repre-
senting the current situation of the train. Once the
train is ready, it starts moving when transition 1 is
triggered, representing a start command. While mov-
ing two events can occur, the train enters a station
(transition 5), or the laser detects an obstacle (transi-
tion 3). The first leads the train to stop and remain on
a terminal state waiting to proceed to the next trunk.
The second also leads the train to stop and wait for
permission to finish the current trunk. These transi-
tions can be assumed non-conflicting without loosing
generality. In fact it is enough that obstacle detection
range is longer than the length of the station approach-
ing zone.
4.2 Motor
Figure 3b represents the Petri net that models the elec-
tric motor. There are four main operation modes for
the motor and each one is represented by a place. The
presence of a token in one of these places indicates the
current mode of the motor. Once the motor is started
SIMULTECH2013-3rdInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
424

(a) Petri net train behavior model.
(b) Petri net motor behavior model.
(c) Petri net battery model.
(d) Petri net model for target velocity.
Figure 3: Petri net models for the main sub-systems and
respective incidence matrices and initial conditions.
(transition 6) it accelerates until the vehicle reaches
the referenced cruise velocity (transition 7). Once this
happens the motor switches to cruise velocity mode.
From this mode two possible events can occur: the
vehicle stops (transition 8), and in that case the mo-
tor switches to decelerating mode or the vehicle is al-
lowed to increase cruise velocity (transition 11) and
in that case it switches to accelerating mode. Tran-
sition 8 can be set by three different types of events.
The first occurs when the train approaches a station,
then transition 8 fires leading the motor to decelerate
until it stops. The second occurs when the laser range
finder detects an object. If this happens the train is
required to stop and transition 8 fires leading the ve-
hicle to decelerate until it stops. In case the obstacle is
no longer detected (transition 22) it is possible for the
vehicle to switch from decelerating mode to accelerat-
ing mode in order to resume previous motion. Finally
transition 8 can also be set by a power decrease event.
If the output power of panels can no longer support
current cruise velocity, transition 8 fires and the mo-
tor decelerates until a supported velocity is reached.
It is also possible that this situation is reversed. This
means that if the output power of panels increases,
so does the supported cruise velocity and the motor
switches to accelerating mode (transition 11) until it
reaches the new cruise velocity.
4.3 Battery
The battery is modeled according to the stages of op-
eration and the charge level condition (Figure 3c).
There are three possible stages of operation for the
battery: idle, charging and discharging. If the power
delivered by the panels is not enough to sustain min-
imum cruise velocity, the battery is allowed to dis-
charge the necessary power so that the vehicle reaches
that velocity. Also during accelerating mode, where a
power peak demand occurs, the battery is allowed to
discharge since the power requested during this mode
is higher than the panels can deliver. If none of these
situations occur, the battery remains in an idle stage
waiting for a discharging or charging request.
The battery enters charging mode whenever the
motor decelerates, through the regenerative braking
system or at the stations, through the power grid,
whenever the charge is below the safety value.
The battery condition is also modeled by three
main states: above safety value, below safety value
and below minimum value. The minimum value rep-
resents a characteristic property of each type of bat-
tery that states that the battery charge should never
cross that threshold, at the risk of malfunction.
The safe value represents the necessary charge
ViabilityStudyonSupervisoryControlforaSolarPoweredTrain
425

that ensures the train reaches the next station con-
sidering situations such as low irradiance, obstacles
on the track or even communication failure. At every
station this minimum value must be met, charging the
battery if necessary. If the battery charge remains be-
tween these two values, the token remains in the place
representing below safe state.
4.4 Cruise Speed Reference
Figure 3d defines the desired cruise speed for the ve-
hicle directly from the power delivered by the panels.
Through transition 26, the marking of place 16 rep-
resenting the panel is determined by Simulink. This
means that the number of tokens in place 16 corre-
sponds to the power delivered by the panels. The
transfer of real measurements into the Petri net re-
quires that those values are discretized and quantified
into tokens. For instance, 1 token in place 16 means
that the panels are delivering 1Kw power. The same
reasoning is applied to velocity which means that 1 to-
ken in place 15 corresponds to a specific value cruise
velocity for the vehicle. This calculation assumes
that speed varies linearly with power. This linearity
can actually be verified for low velocities such as the
range considered for the solar train, (Andr
´
e, 2006).
5 SUPERVISORY CONTROLLER
The subsystems in Figure 3, that form the Helianto
system are controlled by a supervisor, in charge of ac-
counting for the constraints related to the resources
and operation requirements. The approach followed
in this work is that in (Moody et al., 1994). Roughly,
it consists in describing the desired behavior for the
supervisor through a set of linear constraints involv-
ing the marking and transition vectors.
A first version of the supervisor accounts for a ba-
sic set of constraints, listed below. This set does not
yet account for temporal constraints such as the train
timetable.
1. Once the battery crosses a minimum value thresh-
old it stops discharging.
2. While the battery remains under minimum charge
value, it cannot discharge.
3. The train is only allowed to begin traveling the
next trunk in case the battery charge is above the
safe value.
4. While the motor is at cruise speed mode it
switches to decelerating mode when a station ap-
proaches or an obstacle is detected.
Table 1: Algebraic constraints and controller solution; v
i
and u
j
stand for the values of transitions and place mark-
ings, respectively.
Constraint Description Additional
places
Additional
arcs
1 v
14
≤ v
20
place 19 –
2 u
9
+ u
12
≤ 1 place 18 –
3 v
2
≤ u
14
— 2
4 v
8
≤ u
3
;v
8
≤ u
4
– 4
5 v
6
≤ u
1
– 2
6 u
15
≤ 4 place 17 –
5. While the motor is off it only starts when the train
is set to begin the next trunk or when an obstacle,
causing the train to stop, is no longer detected.
6. Cruise speed cannot exceed a certain value.
The incidence matrix used corresponds to the global
system matrix,
M =
M
0
0 0 0
0 M
1
0 0
0 0 M
2
0
0 0 0 M
3
where M
0
,M
1
,M
2
and M
3
are defined in Figure 3.
Table 1 summarizes the constraints as well as the
controller places and arcs, on Figure 4, that result
from each constraint.
The resulting supervised system is shown in Fig-
ure 4 where color (thick) arcs and places represent the
controller elements added to the baseline model.
Accounting for a timetable can be done in multiple
ways, e.g., (i) using a timed transition from place 7 to
a new place so that the elapsed time can be counted
through the marking of this new place, or (ii) simply
add a new input place with the marking being defined
after the events generated according to a real clock
from Simulink. Each of these ways requires an ac-
tive changing of the constraint that bounds the cruise
velocity, in place 15, this meaning that a minimum
cruise must be defined in order to the train meeting the
schedule. The second of the aforementioned strate-
gies was implemented and a new transition connected
to a new place were added to the model. Since Netlab
does not include timed transition elements, the transi-
tion is commanded by an external signal in Simulink
that allows the firing whenever simulation time in-
creases by one second. Once the transition fires a
token is placed in the new place in order to account
for the elapsed time. The same was applied to dis-
tance, and another transition and place were added to
the model with the purpose of counting the covered
distance. Both the covered distance and elapsed time
signals are transferred to Simulink so that a minimum
cruise velocity is defined for the train on a real-time
basis.
SIMULTECH2013-3rdInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
426
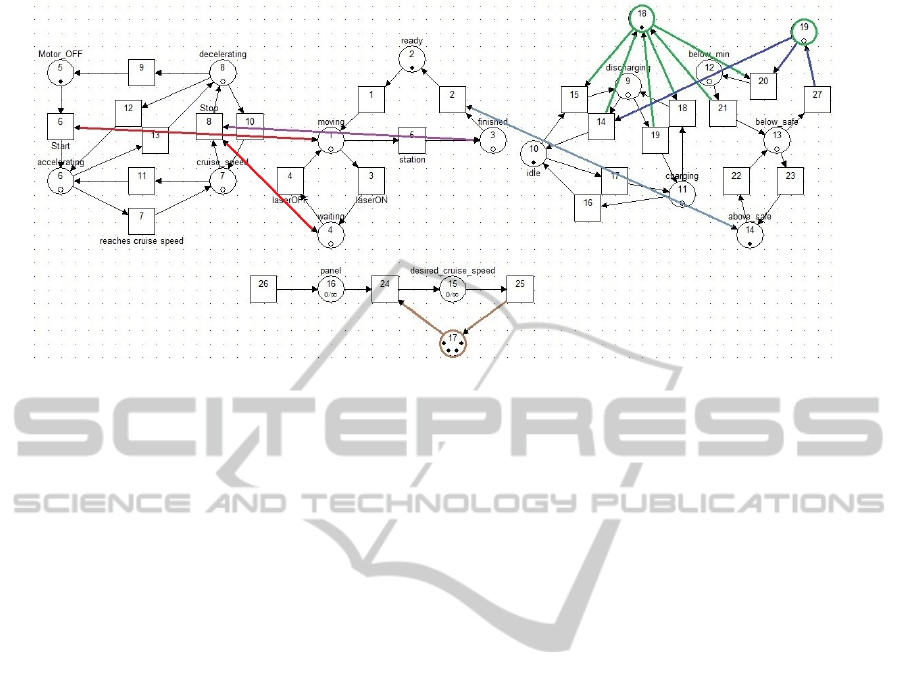
Figure 4: Petri net model of the supervised system.
6 SIMULATION RESULTS
This section presents simulation results obtained for
the model designed in the previous sections. The per-
formance of the train is analyzed for multiple scenar-
ios and unpredictable events such as obstacle detec-
tion and unfavorable weather conditions. The per-
formance of the train is evaluated based on energy
consumption, time of travel and speed achieved. The
power delivered by the panels varies along the day,
depending directly on irradiance and on the suns’ po-
sition. The irradiance of the sun along the day corre-
sponds to the power delivered by the sun per square
meter. The panels can only absorb part of this power,
though is has to be taken into account that the ef-
ficiency depends on the technology and equipment.
Currently the sunlight conversion rate (solar panel ef-
ficiency) in commercial products can go as low as
8.8% and as high as 43% for state of the art products,
(SRoeCo Solar, 2013; State of California Energy
Commission and California Public Utilities Commis-
sion , 2013). Throughout this section a value of 21%
is assumed, corresponding to panels from a Japanese
manufacturer sold in Europe.
The typical irradiance values can be obtained from
a solar radiation data services website (SoDa, 2012).
Since the main working season for the train is the
Summer, the values used correspond to an average
day in June as to consider the typical Summer irradi-
ance conditions. Figure 5a shows the power delivered
considering that the panels dimensions are 1.6x1m
and that 12 panels are used. A maximum peak of
around 4 kW can be obtained between noon and 2 pm.
The relation between power and speed is considered
linear (Andr
´
e, 2006), thus the corresponding equation
is obtained by applying a linear interpolation between
several velocities and corresponding power demand,
given by QSS. The cruise velocity curve allowed for
the train, given the time of the day and considering
the power delivered at that time is also represented in
Figure5a. A corresponding maximum velocity of 25
km/h can be reached during peak power. Consider-
ing the purpose of the Helianto project the minimum
cruise velocity corresponds to 10 km/h. It is possible
to observe that during summer months this velocity
can be achieved from around 9 am to 5 pm. Until 9 am
and after 5 pm the train requires the battery support
in order to reach minimum cruise velocity. This re-
quirement is assumed throughout the remaining sim-
ulations. Also, the average power delivered along the
day is assumed to correspond to 3 kW.
An acceleration phase produces a power peak de-
mand. The train is assumed to start with fixed accel-
eration and this value must be fixed to avoid unnec-
essary variations of energy demand and consequently
unnecessary power peaks. A balanced acceleration
value must be set so that the power peak can be sus-
tained by the panels and battery. A range of accel-
eration values is tested as to define a suitable value
at the start of the train. A typical urban train accel-
eration value corresponds to 1 m/s
2
which is consid-
ered comfortable from the point of view of the passen-
ger (Andr
´
e, 2006). Since the solar train does not reach
a typical range of speeds of an urban train, a possible
range of acceleration values is considered from 0 to 1
m/s
2
.
Figure 5b shows the energy consumption and
power peak given a range of possible acceleration val-
ues. Cruise velocity was set at 20 km/h, the road
gradient and weight carried are considered null and
ViabilityStudyonSupervisoryControlforaSolarPoweredTrain
427
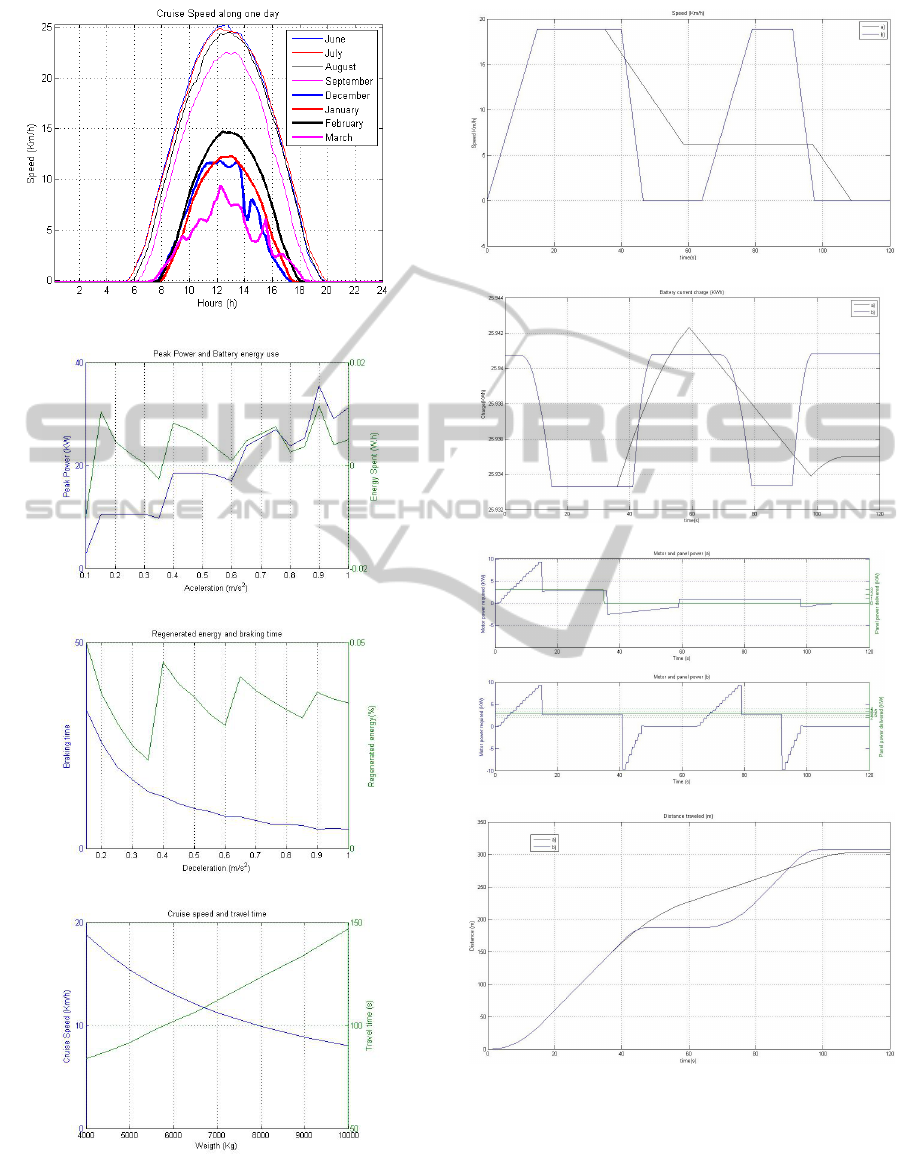
(a) Power delivered by panels and cruise velocity allowed along daytime.
(b) Peak power and battery use vs. acceleration
(c) Renegeration and braking time vs. deceleration
(d) Cruise speed allowed and travel time vs. weight carried
by the train
Figure 5: Simulation results.
(a) Train speed vs. time.
(b) Battery charge vs. time.
(c) Motor power required and panel delivered power for each scenario.
(d) Distance traveled by the train vs. time.
Figure 6: Simulation results for two scenarios: obstacle de-
tection (b) and power cut (a).
the trunk length, braking deceleration, and panel de-
livered power are constant. As expected, the peak
power increases with acceleration. Energy consump-
tion is higher for the highest and lowest acceleration
SIMULTECH2013-3rdInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
428
(a) Minimum velocity required to reach the target
within schedule.
(b) Battery charge vs. time.
(c) Distance traveled by the train vs. time.
Figure 7: Simulation results for a timed mission.
values. This can be explained since for the highest
values the peak power is higher and therefore more
energy is spent during acceleration. On the other hand
for the lowest values the peak power is lower but it
takes more time for the train to reach cruise speed, so
the acceleration period is longer. Acceleration values
between 0.15 and 0.35 m/s
2
are often considered as
the range representing a tradeoff between admissible
power peaks, total energy consumption, and passen-
gers comfort. Hereafter, an acceleration of 0.35 m/s
2
is assumed in all simulations.
Deceleration is also set to a constant value. Brak-
ing time and passengers comfort must also be consid-
ered so the deceleration value should not be too low
nor too high respectively. The corresponding simu-
lation results can be seen in Figure 5c for the energy
regeneration and travel time given a range of possi-
ble deceleration values. Cruise velocity was set to
20 km/h and the track gradient and passenger weight
are considered null. The absolute deceleration value
was linearly increased in order to observe the regener-
ated energy and braking time evolution. As expected,
braking phase duration decreases for higher deceler-
ation values, this happens because the higher the de-
celeration value, the later the train brakes in order to
stop at the station.
Regeneration increases with deceleration. Rea-
sonable values for deceleration are often in the range
-0.6 and -0.8 m/s
2
. Hereafter, a deceleration of -0.8
m/s
2
is assumed.
Train weight influences the power demand and
consequently the velocity of the train. Figure 5d
shows travel time and cruise velocity given the weight
carried by the train, considering the same amount of
power available. It is possible to see that the higher
the weight the lower the cruise velocity reached by
the train. Consequently the travel time increases with
weight. For a weight exceeding 8 tonnes it is possible
to see that the cruise velocity is lower than the mini-
mum value of 10 km/h and the train must use battery
power in order to achieve minimum cruise velocity.
The results of two simulations on different sce-
narios are presented in Figure 6, namely a power loss
that prevents the panels from delivering power (for
instance, cloudy weather), and an obstacle is detected
on the track. The train is intended to travel 1 km and
the power delivered by the panels is 3 kW. The battery
initial charge is set to 7 kWh.
Figure 6a shows the velocity plot for each simula-
tion. For the obstacle scenario the train reaches cruise
speed around time unit 15. At time 40, when the ob-
stacle is detected, the train brakes to full stop. The
obstacle detection is lost at time 65, when the train
accelerates and reaches cruise speed again. Once it
reaches final destination it decelerates again until it
stops.
In this scenario it is also possible to see, Figure
6b, that the battery discharges only during accelera-
tion and charges during deceleration, when regenera-
tion occurs. During cruise speed the battery keeps its
charge since the power delivered by the panels is able
to support speed above minimum.
In the first scenario once the power loss is de-
tected, the train decelerates until it reaches minimum
speed. This speed guarantees the train reaches the
destination within the time goal. This speed is sup-
ported exclusively by the battery, since the panels are
delivering no power. Figure 6b shows that during this
time the battery is discharging as expected, until the
train approaches the station.
Figure 6c represents the power required by the
motor and the power delivered by the panels. It is
possible to see in Figure 6b that whenever the de-
ViabilityStudyonSupervisoryControlforaSolarPoweredTrain
429

mand is larger than the power delivered, the battery
discharges. This is verified in the acceleration phase
and also during the power cut, in order to support the
minimum speed.
Figure 6d represents the distance traveled by the
train during simulation. By comparing these graphics
with the speed profile shown in 6a it is possible to see
that the model is consistent.
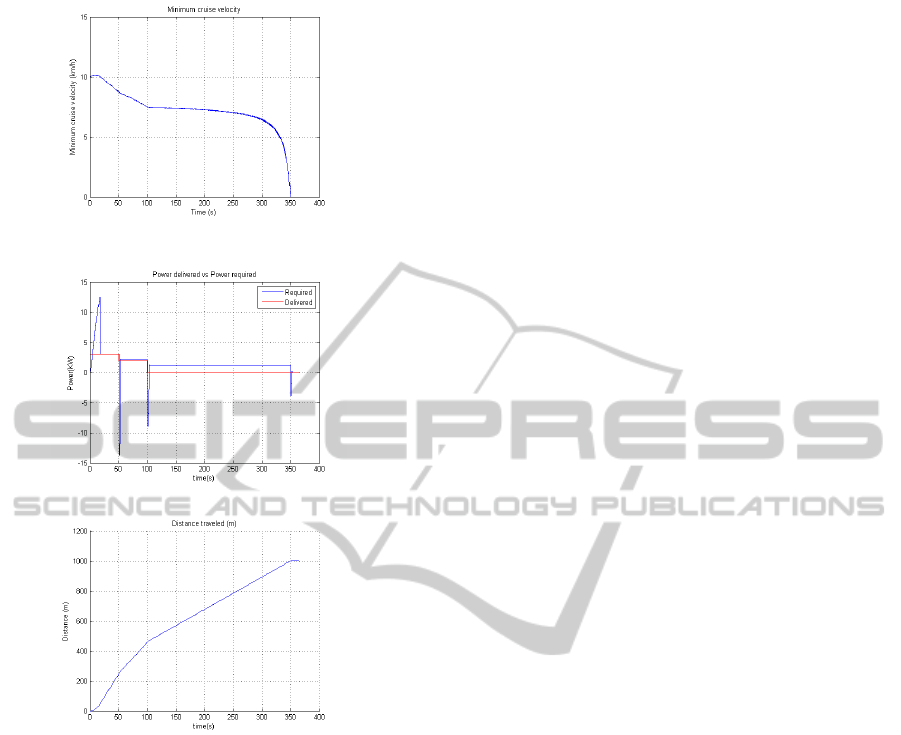
Accounting for a time schedule was implemented
by feeding the Petri net model with a timing signal
from the external environment. A simulation was
performed where the train is required to travel 1 km
within a maximum time of 360 s. The results are
shown in Figure 7.
Figure 7a shows the minimum velocity required
in order to reach the target within the maximum time
given. A higher velocity is allowed as long as the pan-
els are able to sustain it. Through Figure 7b it is pos-
sible to see that until time 100 the panels are able to
sustain a higher velocity, which causes the minimum
velocity value to decrease as time passes. From that
time instant forward the panels stop delivering power,
which causes the train to assume the value of mini-
mum velocity, in order to reach the target in time. The
train travels at this velocity until it stops at the target
within the defined schedule.
7 CONCLUSIONS
This paper describes a simulation tool to assess the
viability of the Helianto solar train project.
The whole infrastructure was modeled as a dis-
crete events system (DES), represented by Petri nets,
and a supervisory controller was designed for the
whole system. Two key toolboxes were used for these
purposes, respectively, QSS and Netlab. The perfor-
mance of the train is analyzed for multiple scenarios
and evaluated based on energy consumption, travel
time and speed achieved.
Simulations are performed on two different sce-
narios. The first scenario refers to a situation where an
obstacle is detected on the track and the second refers
to a power cut during travel. Temporal constraints
such as the ones introduced by time schedules are also
accounted for. The results were consistent, showing
that the velocity achieved by the train allowed the mo-
tion to be maintained by the panels alone, resorting to
battery only during acceleration phase, where a power
peak demand occurs, or when a power failure occurs
in order to sustain minimum velocity.
The results obtained show consistency in the sense
that the train behaves as realistically expected and the
energy consumption was effectively managed. More-
over, taking advantage of the flexibility of the Mat-
lab/Simulink environment the overall tool is suitable
for hardware-in-the-loop experiments.
ACKNOWLEDGEMENTS
This work was partially supported by FCT project
PEst-OE/EEI/LA0009/2011.
REFERENCES
State of California Energy Commission and California Pub-
lic Utilities Commission (2013). Go Solar Califor-
nia. http://www.gosolarcalifornia.ca.gov/equipment/
pv modules.php. Accessed January 2013.
Andr
´
e, J. (2006). Transporte Interurbano em Portugal, vol-
ume 2. IST Press. Lisbon (in Portuguese).
Bogdan, S., Lewis, F., Kovacic, Z., and Meireles Jr, J.
(2006). Manufacturing Systems Control Design: A
Matrix Based Approach. Springer.
Davidrajuh, R. (2008). Developing a New Petri Net Tool
for Simulation of Discrete Event Systems. In Procs.
2nd Asis Int. Conf. on Modeling and Simulation.
G. Cassandras, C. and Lafortune, S. (2008). Introduction to
Discrete Event Systems. Springer.
Godoy Simaes, M., Franceschetti, N., and Adamowski, J.
(1998). Drive System Control and Energy Manage-
ment of a Solar Powered Electric Vehicle. In Procs. of
the 13th Annual Applied Power Electronics Conf. and
Exposition (APEC’98), volume 1.
Helianto (2013). The Helianto Project. Available at http://
helianto.ist.utl.pt.
Jinrui, N., Fengchun, S., and Qinglian, R. (2006). A Study
of Energy management System of Electric Vehicles.
In Procs. IEEE Vehicle Power and Propulsion Conf
(VPPC’06).
Moody, J., Yamalidou, K., Antsaklis, P., and Lemmon, M.
(1994). Feedback control of Petri nets based on place
invariants. Lake Buena Vista.
Netlab (2008). Petri Net Toolbox: Netlab. Available
at http://www.irt.rwth-aachen.de/en/fuer-studierende/
downloads/petri-net-tool-netlab/.
QSS (2008). QSS-Toolbox. Available at http://
www.idsc.ethz.ch/ Downloads/ qss.
SoDa (2012). SoDa, Solar Radiation Data. http://
www.soda-is.com. Accessed January 2012.
SRoeCo Solar (2013). Most Efficient Solar Panels.
http://sroeco.com/solar/most-efficient-solar-panels.
Accessed January 2013.
SIMULTECH2013-3rdInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
430
