
A Clustering Topology for Wireless Sensor Networks
New Semantics over Network Topology
Ionel Tudor Calistru, Paul Cotofrei and Kilian Stoffel
Information Management Institute, University of Neuchatel, Neuchatel, Switzerland
Keywords:
Sensor Networks, Semantic Sensor Web, Network Topology, Energy-aware Routing, Routing protocols, Data
Mining, Clustering, DBSCAN.
Abstract:
Sensor networks are a primary source of massive amounts of data about the real world that surrounds us,
measuring a wide range of physical parameters in real time. Given the hardware limitations and physical envi-
ronment in which the sensors must operate, along with frequent changes of network topology, algorithms and
protocols must be designed to provide a robust and energy efficient communications mechanism. With a view
to addressing these constraints, this paper proposes a routing technique that is based on density based spatial
clustering of applications with noise (DBSCAN) algorithm. This technique reveals several network topology
semantics, enables the splitting of sensors responsibilities (communication/routing and sensing/monitoring),
reduces the level of energy wasted on sending messages through the network by data aggregation only in
cluster-head nodes and last but not the least, brings along very good results prolonging the network lifetime.
1 INTRODUCTION
Wireless sensor networking is an emerging technol-
ogy that has a wide range of potential applications
(Sheth et al., 2008; Calbimonte et al., 2011) in-
cluding environment monitoring (e.g. meteorology,
civic planning, traffic management, calamities detec-
tion), medical systems (e.g. health monitoring), smart
spaces, home automation or homeland security. Such
networks will consist of a large number of heteroge-
neous sensor nodes, sensors that organize themselves
into a multihop wireless network. Each node has one
or more embedded processors, low-power radios and
is normally battery operated. Typically, these nodes
are very densely deployed and have sensing, commu-
nicating and data processing capabilities. They can
gather different type of information such as pressure,
humidity, temperature, speed, location and they must
coordinate to perform a common task.
Although many protocols and algorithms have
been proposed for traditional wireless ad-hoc net-
works, they are not well suited to the unique fea-
tures and application requirements of sensor net-
works. Given the hardware and computational limi-
tations (small size, low power, limited computational
and memory capacities), the constraints of the phys-
ical environment in which the sensors must operate,
along with frequent changes of network topology,
optimal routing algorithms and protocols (Akyildiz
et al., 2002; Stojmenovic, 2005) must be designed to
provide a robust and energy efficient communications
mechanism.
2 MOTIVATION
Prolonged network lifetime, topology awareness,
scalability and load balancing are important require-
ments for many sensor network applications. We
have also to take into consideration that the most
applications usually deploy a larger number of sen-
sors than the optimum necessary (Akkaya and You-
nis, 2005). Also many of the sensors that are used
to discover alternative networks paths to the Sink
(central node) waste their energy without contribut-
ing neither to routing or sensing phase (Cardei et al.,
2002; Cardei and Wu, 2006). To satisfy these require-
ments, several solutions have been proposed (Akkaya
and Younis, 2005; Abbasi and Younis, 2007) (You-
nis and Fahmy, 2003; Shin et al., 2006) (Cardei and
Wu, 2006) that exploit the trade of among energy, ac-
curacy, and latency. Different topologies were pro-
posed with hierarchical topologies as the most popu-
lar one. In this paper we address a cluster based topol-
ogy with a clear semantics which enables us to bet-
ter achieve the previously mentioned goals. Accord-
153
Cotofrei P., Calistru I. and Stoffel K..
A Clustering Topology for Wireless Sensor Networks - New Semantics over Network Topology.
DOI: 10.5220/0004423101530160
In Proceedings of the 2nd International Conference on Data Technologies and Applications (DATA-2013), pages 153-160
ISBN: 978-989-8565-67-9
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

ing to the general classification of clustering scheme
done in (Abbasi and Younis, 2007), different cluster-
ing techniques have been addressed in function of the
network model, clustering objective or the taxonomy
of the clustering attributes.
Among the large number of clustering algorithms
for sensor networks proposed in the literature, such as
LCA (Baker and Ephremides, 1981), CLUBS (Nag-
pal and Coore, 1998), EEHC (Bandyopadhyay and
Coyle, 2003) - all having a linear convergence rate -
or LEACH (Heinzelman et al., 2002), HEED (Younis
and Fahmy, 2004), EECPL(Bajaber and Awan, 2010),
N-LEACH (Tripathi et al., 2012) - with a constant
convergence time - our proposed cluster topology is
based on the DBSCAN (Density Based Spatial Clus-
tering of Applications with Noise) algorithm (Sander
et al., 1998), a simple and widely used density-based
clustering algorithm.
In the context of sensor networks, DBSCAN has
already been applied with different purposes; for ex-
ample, Apiletti(Apiletti et al., 2011) used it to detect
sensor correlations whereas Almuzaini(Almuzaini
and Gulliver, 2011) applies it to a range-based sensor
nodes localization algorithm. However, to the best of
our knowledge, DBSCAN has not been used before as
a in-network clustering strategy of sensor nodes. Its
definition of a cluster is based on the notion of density
reachability and it can find arbitrarily shaped clusters,
which makes it suitable in the context of randomly
deployed wireless sensor networks. Moreover, the al-
gorithm does not require to know the number of clus-
ters a priori and it has a good efficiency on very large
datasets.
Taking all this facts into account, we propose a
DBSCAN based communication schema, where sen-
sor nodes are organized into clusters. The cluster-
head nodes are dedicated solely to transmit (route)
messages between them in order to reach the Sink,
and the border-nodes are responsible with the sensing
(monitoring) activity. Our objective is to prove that
this communication strategy fits well sensor networks
requirements and improves considerably the network
lifetime as well as balances the energy consumption.
Moreover, several network topology semantics can be
revealed by analyzing the results of a such technique.
The rest of the paper is structured as follows. The
next section will present a detailed description of DB-
SCAN algorithm and its application to our routing
technique for wireless sensor networks. Several simu-
lation results will be presented in Section 4, followed
by different discussions and improvements. Finally,
the last section summarizes our work and proposes
some promising future research directions.
3 DBSCAN
One of the major data mining methods is the clus-
tering, defined as the unsupervised learning task of
grouping the objects from a dataset into meaningful
sub-classes. There has been a lot of research on clus-
tering algorithms for decades but their application to
sensor networks rise the following new requirements:
i. Discovery of clusters with arbitrary shape, as the
clusters’ shape in sensor networks may be non-
convex, spherical, linear, elongated etc.
ii. Good efficiency on very large networks, with sig-
nificantly more than just a few thousand objects.
Introduced in (Ester et al., 1996), the clustering al-
gorithm DBSCAN relies on a density-based notion
of clusters. For each point p of a cluster, the den-
sity in its ε-neighborhood (the number of points sit-
uated at a distance less than ε from p) has to exceed
some threshold MinP. DBSCAN requires two input
parameters (ε and MinP) and supports the user in de-
termining an appropriate value for them. Designed
to discover clusters of arbitrary shape as well as to
distinguish noise, DBSCAN is also efficient for large
spatial datasets.
In (Sander et al., 1998) it is shown that we can
use any binary predicate which is symmetric and re-
flexive in the definition of a neighborhood relation.
For example, when clustering polygons, the neigh-
borhood may be defined by the intersect predicate.
Furthermore, instead of simply counting the objects
in the neighborhood of an object, we can use other
measures to define the ”cardinality” of that neighbor-
hood. Thus, the generalized GDBSCAN algorithm
(Sander et al., 1998) can cluster point objects as well
as spatially extended objects according to both spatial
and non-spatial attributes. In the following subsection
we present the notion of density-connected sets and
in second subsection we give a detailed description of
GDBSCAN algorithm.
3.1 Density-connected Sets
The concept of density-connected sets is a general-
ization of the concept of density-based clusters (Ester
et al., 1996; Sander et al., 1998). The generalization
concerns the neighborhood relation N
h
(p, p
0
)- the dis-
tance is replaced by any binary predicate, symmetric
and reflexive - and the density measure - the ordinal
cardinality is replaced by any function C
w
: 2
D
→ R
+
.
In the following, we assume D to be a finite set of
objects characterized by spatial and non-spatial at-
tributes.
The definition of a cluster in (Ester et al., 1996)
is restricted to the special case of a distance based
DATA2013-2ndInternationalConferenceonDataManagementTechnologiesandApplications
154

Figure 1: Core Objects and Border Objects (Source:
(Sander et al., 1998)).
neighborhood, N
ε
(p) = {p
0
∈ D : |p − p
0
| ≤ ε}. A
distance based neighborhood is a natural notion of a
neighborhood for point objects, but if clustering spa-
tially extended objects such as a set of polygons of
largely differing sizes it may be more appropriate to
use neighborhood predicates like intersects or meets
for finding clusters of polygons.
A natural, but naive approach to define a density-
connected set S ⊆ D as a generalization of a density-
based cluster is to require, for each object p ∈
S, that the cardinality measure C
w
of the N
h
(p)-
neighborhood to be less than a given threshold MinC.
However, this approach fails because a density-
connected set contains two types of objects: ”inside”
the set (core object) and ”on the border” of the set
(border objects). In general, an N
h
-neighborhood of a
border object has a significantly lower C
w
value than
an N
h
-neighborhood of a core object (see Fig. 1).
Therefore, the value MinC must be set to a relatively
low value in order to include all objects belonging to
the same density-connected set. This value, however,
will not be characteristic for the respective density-
connected set - particularly in the presence of noise
objects.
The definition of a density-connected set must
precise how to decide if a given object p belongs
to a given set S by defining the form of the re-
lation ”connecting” two objects from the same set.
The binary relations density-reachable and density-
connected introduced in (Sander et al., 1998) are used
to define a density-connected set with respect to N
h
-
neighborhood, C
w
cardinality function and threshold
MinC.
Definition 1 (directly density-reachable). An object p
is directly density-reachable from an object q if p ∈
N
h
(q) and C
w
(N
h
(q)) ≥ MinC.
Obviously, directly density-reachable is symmetric
for pairs of core objects. In general, however, it is
not symmetric if one core object and one border ob-
ject are involved (see Fig. 2).
Figure 2: Directly density-reachable relation (Source:
(Sander et al., 1998)).
Figure 3: Density-reachability relation (Source: (Sander
et al., 1998)).
Definition 2 (density-reachable). An object p is
density-reachable from an object q if there is a chain
of objects p
1
= q, p
2
, . . . , p
n
= p, such that ∀i =
1, . . . , n : p
i+1
is directly density-reachable from p
i
.
Density-reachability is a canonical extension of direct
density-reachability. This relation is transitive, but it
is not symmetric in general (see Fig 3), except for core
objects (a chain from q to p can be reversed if p is also
a core object).
Two border objects p and q of the same density-
connected set S may be not density reachable from
each other. However, two objects belonging to the
same density-connected set must be ”connected” by
a symmetric binary relation. This relation, denoted
density-connectivity, requires a core object in S from
which both objects of S are density-reachable.
Definition 3 (density-connected). An object p is
density-connected to an object q if there is an object o
such that both p and q are density-reachable from o.
Density-connectivity is a symmetric relation. For
density reachable objects, the relation of density-
connectivity is also reflexive (see Fig 4).
Figure 4: Density-connectivity (Source: (Sander et al.,
1998)).
Definition 4 (density-connected set). The set S ⊆ D
is density-connected if satisfies the following condi-
tions:
i. Maximality: ∀p, q ∈ D: if p ∈ S and q is density-
reachable from p then q ∈ S.
ii. Connectivity: ∀p, q ∈ S. p is density-connected to
q.
Note that a density-connected set S contains at least
one core object: since S contains at least one object p,
this one must be density-connected to itself via some
object o (which may be equal to p). Thus, at least o
has to satisfy the core condition, C
w
(N
h
(o)) ≥ MinC.
3.2 GDBSCAN
The clustering algorithm GDBSCAN (Generalized
AClusteringTopologyforWirelessSensorNetworks-NewSemanticsoverNetworkTopology
155

Density Based Spatial Clustering of Applications
with Noise), introduced by Sander (Sander et al.,
1998), was designed to discover density-connected
sets in a spatial, possible noise, databaset.
To find a density-connected set, GDBSCAN starts
with an arbitrary object p and retrieves all objects
density-reachable from p with respect to N
h
, C
w
and
MinC. If p is a core object, this procedure yields a
density-connected set. If p is not a core object, no ob-
jects are density-reachable from p and p is assigned to
NOISE. This procedure is iteratively applied to each
object which has not yet been classified.
GDBSCAN (SetOfObjects, Nh, Cw, MinC)
//SetOfObjects is UNCLASSIFIED
ClusterId := nextId(NOISE)
FOR i FROM 1 TO SetOfObjects.size DO
Object := SetOfObjects.get(i);
IF Object.ClId = UNCLASSIFIED THEN
IF ExpandCluster
(SetOfObjects,Object,ClusterId, Nh, Cw, MinC)
THEN ClusterId := nextId(ClusterId)
END IF
END IF
END FOR
END; // GDBSCAN
SetOfObjects is either the whole database or a dis-
covered cluster from a previous run. Nh and MinC are
the global density parameters and Cw is a pointer to
a function Cw(Objects) that returns the cardinality
of the set Objects. ClusterIds are values from an
ordered and countable datatype (e.g. implemented by
Integers) satisfying
UNCLASSIFIED < NOISE < otherIds.
Each object is marked with a clusterId Object.ClId.
The function nextId(ClusterId) returns the suc-
cessor of ClusterId in the ordering of the datatype
(implemented as Id := Id+1), while the func-
tion SetOfObjects.get(i) returns the i
th
ele-
ment of SetOfObjects. Also the call to function
ExpandCluster is constructing a density-connected
set for a core object Object.
Obviously the efficiency of the above algorithm
depends on the efficiency of the neighborhood query
because such a query is performed exactly once for
each object in SetOfObjects satisfying the selection
condition. If an indexing structure is used allowing
the execution of a neighborhood query in O(logn), an
overall runtime complexity of O(n log n) is obtained.
Therefore, the basic algorithm DBSCAN (Ester et al.,
1996), seen as a specialization of the algorithm GDB-
SCAN for the parameters Nh = N
ε
(·), Cw = ordinal
cardinality and MinC = MinP, has an overall runtime
complexity of O(nlog n).
3.3 DBSCAN based Routing Technique
The main common task of a routing protocol for WSN
is to provide a robust and energy efficient communi-
cation mechanism that enables the collaboration be-
tween a large number of wireless sensors, randomly
distributed in a region called Sensor Field, in order to
send the collected information to a central processing
node, called Sink. To achieve this, one of the well
known strategy is to group sensor nodes into clusters.
We are introducing a new routing technique for wire-
less sensor networks (WSN), technique that, to the
best of our knowledge, is the first approach based on
the DBSCAN clustering algorithm.
The idea of our approach is to form density-based
clusters of sensor nodes so that we can enable the
splitting of sensors responsibilities: make the border-
nodes responsible of sensing/monitoring the events
and the cluster-head nodes (core nodes) aware of ag-
gregating/fusion and communication/routing the mes-
sages to the Sink node.
As we have already mentioned, our approach is
following very closely DBSCAN’s definition of a
cluster that is based on the notion of density reach-
ability. The notion of directly density-reachable is
achieved by the design of WSN, where each sensor
node is aware only of its neighbors with whom it can
interact (by sending or collecting information) using
only local communication strategies. As soon as a
sensor node detects a sufficient number (MinP) of
neighbors, it becomes a cluster-head node, that is ded-
icated - in our approach - solely to transmit (route)
or to aggregate (fusion) information messages. The
border-nodes ( sensor nodes that make part of the
cluster but are not cluster-heads ) are only responsible
with sensing (monitoring) tasks. When a new event is
detected, they just have to transmit the message (de-
scribing the event) to the nearest cluster-head node.
The density-reachable notion is assured by a com-
munication between cluster-head nodes (from cluster-
head to cluster-head). To directly communicate to
each other, two cluster-head nodes must be neigh-
bors, so part of the same cluster. In order to reach
the Sink, every cluster-head node must have estab-
lished its routing paths. This procedure is executed
after the clustering phase, when cluster-head nodes
are elected. In a first phase, the Sink is broadcast-
ing a special (recognition) message to its cluster head
neighbors. In a second phase, as soon as a cluster-
head node receives this kind of message (signed by
the Sink), it updates its routing table and then for-
wards it to all its cluster-head neighbors. After a lim-
ited number of steps all the cluster-head nodes, that
are density-reachable from Sink, have their routing
DATA2013-2ndInternationalConferenceonDataManagementTechnologiesandApplications
156
tables established and are ready to route the events
detected by the border-nodes.
One of the key advantages of DBSCAN, in the
context of randomly deployed sensor networks, is that
it can find arbitrarily shaped clusters. It can even find
clusters completely surrounded by (but not connected
to) a different cluster. Due to the MinP parameter, the
so-called single-link effect (different clusters being
connected by a thin line of points) is reduced. Also,
DBSCAN has the notion of noise, which is very help-
ful for identifying the sensors that should not waste
their energy trying to monitor different events, and
could may be helpful for other tasks.
In the next section we will provide some sets of re-
sults obtained after simulating the activity of a sensor
network under different scenarios. We will see how
our approach reveals several network topology se-
mantics, reduces the level of energy wasted on send-
ing messages through the network by data aggrega-
tion only in cluster-head nodes and last, but not the
least, brings along very good results prolonging the
network lifetime.
4 EXPERIMENTS
Our experiments consist of different simulations that
are based on the following general scenario: A large
number of wireless sensors distributed in a region
(Sensor Field) will collaborate for a common applica-
tion such as environmental monitoring. They should
collect and send information about different events
detected, to a central processing node (Sink).
To probe our routing algorithm we have used
Repast Suite
1
that is a family of advanced, free and
open source agent-based modeling and simulation
platforms. It can be found in two main editions:
Repast Simphony (North et al., 2013) and Repast
for High Performance Computing (HPC) (Collier and
North, 2012). The output of our simulation was col-
lected in a HDF5
2
file, that is a format for flexible
and efficient I/O when dealing with high volume and
complex data.
The battery consumption process have been im-
plemented as a credit point system, where each ac-
tivity of the sensor node has assigned an amount of
points. Each and every sensors have an initial maxi-
mum battery capacity. Activities such as sleep mode,
send/receive messages and sensing events are defined.
During simulation, the battery charge is decreased
gradually according to the sensor activities. Also sev-
eral global counters like number of messages sent
1
http://repast.sourceforge.net/
2
http://hdfgroup.org/HDF5/
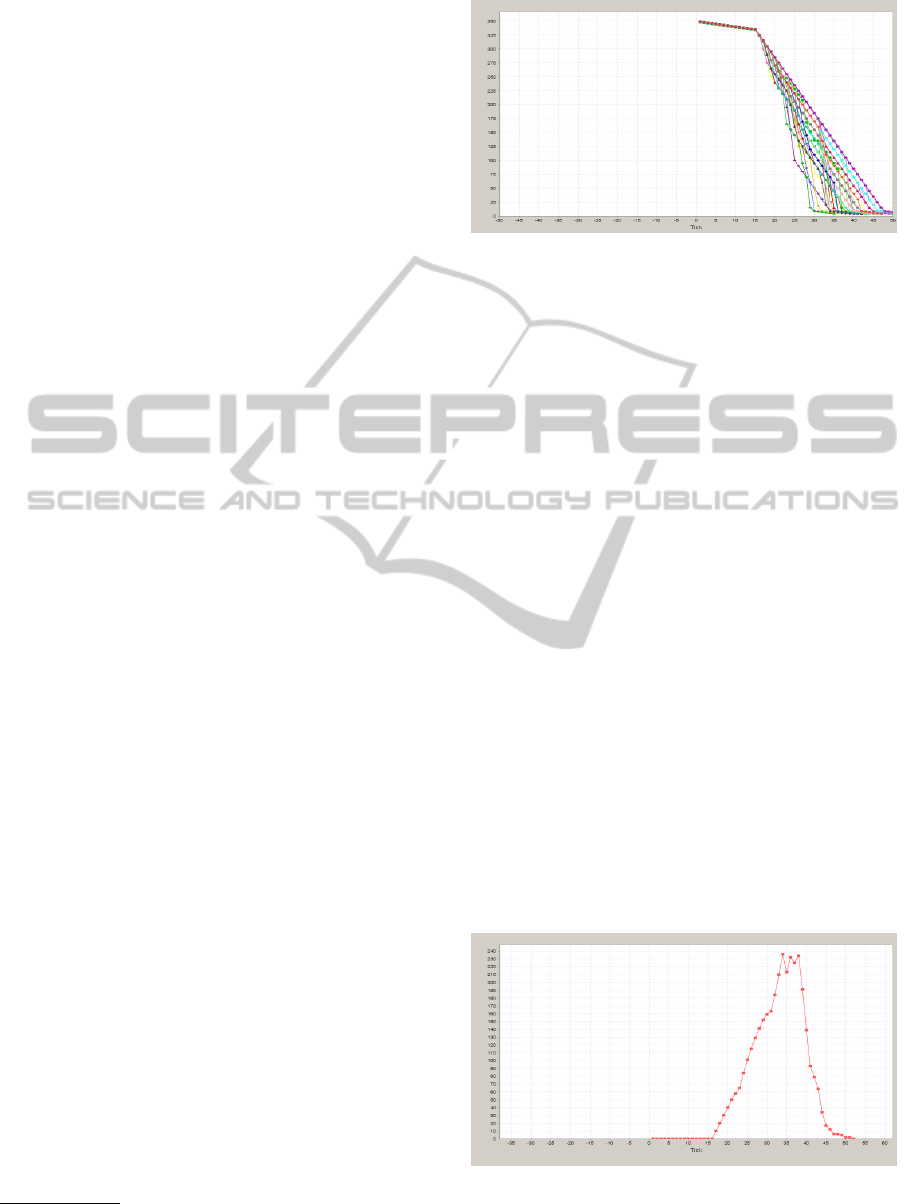
Figure 5: Sensors’ energy evolution (Directed Diffusion).
through the network or number of unique messages
sent through the network are continuously updated.
To underline the improvements of the technique
that we propose, we consider as a benchmark an-
other routing algorithm, an adaptation of Directed
Diffusion approach (Akkaya and Younis, 2005; In-
tanagonwiwat et al., 2003; Estrin et al., 1999). The
basic idea consists of sending messages of recogni-
tion (interest) between the sensor nodes. Based on
these messages (known also as gradient fields), each
sensor node builds up its own routing list to reach
the central node, Sink. The criterion taken into ac-
count is Minimum Energy Path (MEP), defining the
path that consumes less energy for sending packets
between source and sink node. For simplicity, energy
required to transmit data is the same between any two
nodes that can communicate.
Figure 5 presents the evolution of sensors energy
when the routing list is constructed based on directed
diffusion approach. As all nodes are tacking part to all
network activities, the behavior of all sensors is pretty
much the same. After only 50 ticks (simulation ticks)
all the sensors finished already their power. We can
remark also that first sensor node that dies finishes its
energy after around 28 ticks. The total amount of en-
ergy spent on routing messages through the network
by the alive sensors riches 235 (see Fig. 6).
Figure 6: Energy spent by alive sensors to route messages.
AClusteringTopologyforWirelessSensorNetworks-NewSemanticsoverNetworkTopology
157

4.1 DBSCAN over Sensor Networks
In this first scenario, all nodes were taking part
to the network activity, even though many of them
were useless. Keeping in mind that our main goal
is to maximize network lifetime and to reduce the
level of energy consumption, much better results
can be achieved by splitting the sensor responsibili-
ties in two tasks: communication/routing and sens-
ing/monitoring. And this is what our DBSCAN ap-
proach does.
Figure 7: DBSCAN Clusters.
Figure 7 shows a sample of DBSCAN output over a
sensor network. Sensor nodes are organized into two
main clusters (colored nodes). The black nodes rep-
resent the ”noise”, i.e. the sensors that should not par-
ticipate to any action and that will be kept in a sleepy
state. The so-called ”core nodes” or cluster-heads are
market in the figure with ”C” and their only respon-
sibility is to route the received data to the Sink. The
”border nodes” (clustered nodes that are not cluster-
heads) are aware of monitoring different events that
may occur. They also transmit a message directly to
their cluster-head, informing about the events already
detected. In the clustering phase, their state is ”off”.
The performance criterion used to compare DB-
SCAN clustering schema against the Directed Diffu-
sion Routing Algorithm is related to the total energy
spent by alive sensors for sending messages through
the network (Fig. 8). The latest results show us that
Figure 8: Energy spent by alive sensors to route messages
(DBSCAN).
Figure 9: Sensors’ energy evolution (DBSCAN).
the network lifetime is considerably prolonged; the
first node dies only after 80 simulation ticks (Fig. 9).
5 DISCUSSION
As mentioned in the section before, our first results
are related to the Directed Diffusion Routing Algo-
rithm. We remind here that the number of alive sen-
sors starts to decrease around tick 28 (Fig. 5) and that
the energy spent with sending messages is about 235
(Fig. 6). In the following we will see how current
results can be improved by several approaches.
Data Fusion (Akyildiz et al., 2002) is a technique
that can be used to aggregate and to avoid sending
duplicates messages. One sensor node will not broad-
cast a message about the same event more than once.
Consequently, the number of messages sent in the net-
work is reduced, saving also energy consumption, es-
pecially of those sensor nodes that are frequently used
in routing data. By implementing Data Fusion into
our first scenario, the simulation results show that we
can have now all sensors alive for a longer period
(about 37 ticks), the energy consumption being more
uniform. Of course, the major advantage is the reduc-
ing of the energy used for sending messages between
nodes, that is about 100 (57% less).
Another important aspect is that, in our previous
examples, all sensor nodes were active but not all of
them were needed to contribute. As we have moti-
vated, the technique that we propose, based on DB-
SCAN approach, has the notion of noise. This is
very helpful for identifying the sensors that should not
waste their energy trying to monitor different events,
and that may be helpful for further tasks. In our sce-
nario, about 20 nodes out of 50 may remain in a
sleepy state conserving their energy by not participat-
ing to routing or monitoring activities.
We must underline that implementing Data Fu-
sion on each sensor node might be too expensive.
A remarkable improvement of our DBSCAN based
schema is that the messages are routed to Sink ”from
DATA2013-2ndInternationalConferenceonDataManagementTechnologiesandApplications
158

Table 1: Repast HPC Simulation Results.
# Dirrected Diffusion(DD) DD with Data Fusion DBSCAN DBSCAN Data Fusion
Msg Evts(Unique) Power Msg Evts(Unique) Power Msg Evts(Unique) Power Msg Evts(Unique) Power
1 0 0(0) 90% 0 0(0) 90% 0 0(0) 92.1 % 0 0(0) 92.1 %
2 121 8(3) 74.1% 113 3(3) 74.5% 77 3(2) 80.5 % 70 2(2) 80.6 %
3 153 11(4) 62.6% 134 4(4) 63.5% 90 4(2) 72.1 % 84 2(2) 72.5 %
4 214 13(5) 49.6% 160 5(5) 52.2% 113 6(4) 63.2 % 102 4(4) 63.8 %
5 363 16(8) 33% 304 9(9) 35.2% 216 12(6) 50.9 % 189 6(6) 52.2 %
6 390 16(8) 23% 333 9(9) 25.8% 231 13(7) 43.1 % 197 7(7) 44.2 %
7 400 16(8) 17% 343 9(9) 28.2% 240 15(8) 36.1 % 203 8(8) 37.7 %
cluster-head to cluster-head”, implying a much less
number of sensors than for Directed Diffusion ap-
proach. By limiting the number of steps in the routing
paths, the information arrive much more quickly to
the central node. This brings us a great advantage, and
we can see that the energy consumed by broadcasting
messages between sensors, in this last scenario, is less
than 35 (Fig. 8), which represents 35% of the best re-
sult for Directed Diffusion with Data Fusion (around
100). Figure 9 confirms our DBSCAN results: net-
work lifetime is considerably prolonged by having all
sensors alive for about 80 ticks, also better than the
best result for Directed Diffusion with Data Fusion
(around 37 ticks).
However, the hardware limitations did not permit
us to evaluate these techniques with a large scale net-
work. In order to have a deeper analysis of our rout-
ing strategy, we have considered to develop a Repast
HPC Simulation, by enabling our previous solution
to work in a parallel distributed environment. Taking
the advantage of a computer cluster network, we were
able to work with an increased number of sensors ran-
domly deployed. The summary of our results, includ-
ing the first seven simulation steps for a network with
eight hundred nodes (simulated sensors), is presented
in Table 1.
Directed Diffusion and DBSCAN strategies were
both simulated with and without Data Fusion. All the
four cases, presented in Table 1, were running in par-
allel. The columns Msg indicate the number of mes-
sages that have been sent so far between sensor nodes.
The table summarizes also the number of events de-
tected by the network and sent to central Sink node,
how many of them are unique (have not been detected
before) as well as the remaining network power.
As we may remark, a bigger number of events are
detected in earlier steps in the case of Directed Diffu-
sion strategy. The explanation for this fact is that the
events are generated by a uniform distributed random
process. In the earlier steps, when events occur very
close to Sink, it is better to send the information di-
rectly to the Sink and not to a cluster-head. On the
other hand, when events occur far away from Sink,
the clustering can speed up the events routing, fewer
hops being needed to rich the central node.
The results listed in Table 1 show us also that
the communication level between sensor nodes (Msg)
is considerably reduced when using DBSCAN, and
this is reflected also in the surplus of network energy.
However, several interesting results may be obtained
by adjusting DBSCAN parameters like MinP (num-
ber of neighbors a sensor node must have in its neigh-
borhood to act as a cluster-head) and ε (the sensor ra-
dius within sensors may communicate). At this point
we can say that a DBSCAN based communication
strategy improves considerably the network lifetime
as well as balances the energy consumption.
6 CONCLUSIONS AND FUTURE
WORK
To provide a robust and energy efficient commu-
nications mechanism for wireless sensor network
we proposed a routing technique derived from the
density based spatial clustering of applications with
noise (DBSCAN) algorithm. Based on a series of
simulation-based experiments, we could conclude
that the implementation of DBSCAN clustering tech-
nique to WSN reveals several network topology se-
mantics, by enabling the routing from cluster-head to
cluster-head and letting the sensing responsibilities to
the border-nodes. Moreover, the DBSCAN strategy
reduces the level of energy wasted on sending mes-
sages through the network by data aggregation only
in cluster-head nodes and brings along very good re-
sults prolonging the network lifetime.
Based on the successful results of this preliminary
research, several possibilities for future work may be
identified:
• The implementation of a technique that is con-
sidering, periodically or dynamically (in specific
conditions), re-clustering of sensor nodes (since
the network topology changes in time, due to loss
of several sensors).
• The extension of the routing technique to a
dynamic self-reorganization technique that may
learn how to adjust the DBSCAN algorithm pa-
rameters (MinP , ε) in order to optimize a specific
AClusteringTopologyforWirelessSensorNetworks-NewSemanticsoverNetworkTopology
159

streaming data mining task executed on a specific
network topology.
ACKNOWLEDGEMENTS
We are thankful to Prof. Dr. Cornelius Croitoru
(”Alexandru Ioan Cuza” University, Iasi, Romania)
for the contribution and supervision of Ionel Tudor
Calistru previous work, bachelor and master thesis,
related to wireless sensor networks domain.
REFERENCES
Abbasi, A. and Younis, M. (2007). A survey on cluster-
ing algorithms for wireless sensor networks. Comput.
Commun, 30(14):2826–2841.
Akkaya, K. and Younis, M. (2005). A survey on routing
protocols for wireless sensor networks. Ad Hoc Net-
works, 3:325–349.
Akyildiz, I. F., Su, W., Sankarasubramaniam, Y., and
Cayirci, E. (2002). A survey on sensor networks.
IEEE Communications Magazine, 40:102–114.
Almuzaini, K. and Gulliver, T. (2011). Range-based local-
ization in wireless networks using the dbscan cluster-
ing algorithm. In Vehicular Technology Conference
(VTC Spring), 2011 IEEE 73rd, pages 1–7.
Apiletti, D., Baralis, E., and Cerquitelli, T. (2011). Energy-
saving models for wireless sensor networks. Knowl.
Inf. Syst., 28:615–644.
Bajaber, F. and Awan, I. (2010). Energy efficient clustering
protocol to enhance lifetime of wireless sensor net-
work. Journal of Ambient Intelligence and Humanized
Computing, 1:239–248.
Baker, D. and Ephremides, A. (1981). The architectural
organization of a mobile radio network via a dis-
tributed algorithm. IEEE Trans. on Communications,
29(11):1694–1701.
Bandyopadhyay, S. and Coyle, E. (2003). An energy ef-
ficient hierarchical clustering algorithm for wireless
sensor networks. In Proc. of the 22nd Annual Joint
Conf. of the IEEE Computer and Communications So-
cieties (INFOCOM), volume 3, pages 1713–1723.
Calbimonte, J.-P., Jeung, H., Corcho, O., , and Aberer, K.
(2011). Semantic sensor data search in a large-scale
federated sensor network. 4th International Workshop
on Semantic Sensor Networks 2011, 11:23–38.
Cardei, M., MacCallum, D., Cheng, M. X., Min, M., Jia,
X., Li, D., and Du, D.-Z. (2002). Wireless sensor net-
works with energy efficient organization. Journal of
Interconnection Networks, 3:213–229.
Cardei, M. and Wu, J. (2006). Energy-efficient coverage
problems in wireless ad-hoc sensor networks. Com-
puter Communications, 29:413–420.
Collier, N. and North, M. (2012). Parallel agent-based sim-
ulation with repast for high performance computing.
Simulation: Transactions of the Society for Modeling
and Simulation International.
Ester, M., Kriegel, H. P., Sander, J., and Xu, X. (1996).
A density-based algorithm for discovering clusters in
large spatial databases with noise. In Second Interna-
tional Conference on Knowledge Discovery and Data
Mining, pages 226–231.
Estrin, D., Govindan, R., Heidemann, J., and Kumar., S.
(1999). Next century challenges: Scalable coordina-
tion in sensor networks. In Proceedings of the fifth
annual ACM/IEEE international conference on Mo-
bile computing and networking, pages 263–270.
Heinzelman, W., Chandrakasan, A., and Balakrishnan, H.
(2002). An application-specific protocol architecture
for wireless microsensor networks. IEEE Trans. on
Wireless Communications, 1(4):660–670.
Intanagonwiwat, C., Govindan, R., Estrin, D., Heidemann,
J., and Silva, F. (2003). Directed diffusion for wire-
less sensor networking. IEEE/ACM Transactions on
Networking (TON), 11:2–16.
Nagpal, R. and Coore, D. (1998). An algorithm for group
formation in an amorphous computer. In In Proc. of
the 10th Int. Conf. on Parallel and Distributed Com-
puting Systems (PDCS).
North, M., Collier, N., Ozik, J., Tatara, E., Altaweel, M.,
Macal, C., Bragen, M., and Sydelko, P. (2013). Com-
plex adaptive systems modeling with repast simphony.
Complex Adaptive Systems Modeling, 1(3):1–26.
Sander, J., Ester, M., Kriegel, H.-P., and Xu, X. (1998).
Density-based clustering in spatial databases:the algo-
rithm gdbscan and its applications. Data Mining and
Knowledge Discovery, 2:169–194.
Sheth, A., Henson, C., and Sahoo, S. (2008). Semantic sen-
sor web. IEEE Internet Computing, 12:78–83.
Shin, K., Abraham, A., and Han, S. Y. (2006). Self orga-
nizing sensors by minimization of cluster heads using
intelligent clustering. Journal of Digital Information
Managenment, 4:87–923.
Stojmenovic, I. (2005). Handbook of Sensor Networks: Al-
gorithms and Architectures. John Wiley & Sons.
Tripathi, R., Singh, Y., and Verma, N. (2012). N-leach,
a balanced cost cluster-heads selection algorithm for
wireless sensor network. In In National Conference
on Communications (NCC).
Younis, O. and Fahmy, S. (2003). Distributed clustering
for scalable, long-lived sensor networks. Technical
report, Purdue University.
Younis, O. and Fahmy, S. (2004). Heed: a hybrid, energy-
efficient, distributed clustering approach for ad hoc
sensor networks. IEEE Trans. on Mobile Computing,
3(4):366–379.
DATA2013-2ndInternationalConferenceonDataManagementTechnologiesandApplications
160
