
Implementation of Simplicial Complexes for CPA Functions in C++11
using the Armadillo Linear Algebra Library
Sigurdur Freyr Hafstein
School of Science and Engineering, Reykjavik University, Menntavegur 1, 101 Reykjavik, Iceland
Keywords:
CPA Function, Lyapunov Function, Piecewise Linear, Nonlinear System, Triangulation, Simplicial Complex,
C++11, Armadillo Linear Algebra Library.
Abstract:
Continuous, piecewise affine (CPA) functions can be algorithmically parameterized to deliver Lyapunov func-
tions for compact invariant sets. We discuss flexible structures and algorithms to manipulate CPA functions
for these purposes and discuss their implementation in C++11 using the Armadillo linear algebra library. Es-
pecially, we discuss some of the new language features in C++11 that lead to simpler and more readable
code. The implementation was developed in the freeware Visual Studio Express 2012 for Windows Desktop
(VS2012). Apart from a detailed description and code examples for the construction and manipulation of
the simplicial complex that serves as a basis for CPA functions, this contribution includes some discussion
on practical implementation details when using VS2012, C++11, and the linking to and use of the excellent
Armadillo linear algebra library. Thus, some parts of this paper, especially Section 3, might be useful not only
for those interested in the implementation of the simplicial complex for computing CPA Lyapunov functions,
but also for those generally interested in using the free Armadillo library for computations in VS2012.
1 INTRODUCTION
Lyapunov functions are a fundamental concept in the
study of dynamical systems. Their central role in
studies of the stability behavior of dynamical systems
is well known. Their construction is, however, diffi-
cult in the general case, i.e. for nonlinear systems.
Several methods to numerically compute Lya-
punov functions for nonlinear systems have been sug-
gested. To name a few, in (Johansson and Rantzer,
1997) a construction method for piecewise quadratic
Lyapunov functions for piecewise affine autonomous
systems is suggested. In (Eghbal, Pariz, and Karim-
pour, 2012) the computation of piecewise quadratic
Lyapunov functions for planar piecewise affine sys-
tems is formulated as linear matrix inequalities. In
(Johansen, 2000) linear programming is used to pa-
rameterize Lyapunov functions for autonomous non-
linear systems. In (Rezaiee-Pajand and Moghad-
dasie, 2012) a different collocation method using two
classes of basis functions is suggested. In (Giesl,
2007) radial basis functions are used to solve numer-
ically a generalized Zubov equation. In (Peet and
Papachristodoulou, 2010) the numerical construction
of Lyapunov functions that are presentable as sum of
squares of polynomials is considered. The Lyapunov
functions are computed by means of convexoptimiza-
tion.
One method that has been studied in some de-
tail recently, uses linear programming to parameterize
CPA Lyapunov functions in compact neighbourhoods
of exponentially stable equilibria. This approach was
first followed in (Julian, Guivant, and Desages, 1999)
and was enhanced in (Marinosson, 2002a and 2002b)
to compute true Lyapunov functions, rather than ap-
proximations requiring a posteriori analysis to deter-
mine their quality. In (Hafstein, 2004 and 2005) it was
proved that when an arbitrary small hypercube around
the equilibrium is excluded from the domain of the to
be computed CPA Lyapunov function, the computa-
tion would always succeed. The domain of the com-
puted CPA Lyapunov function is otherwise only lim-
ited to any compact subset of the equilibrium’s region
of attraction.
In (Giesl and Hafstein, 2012 and 2013) the neces-
sity of excluding an arbitrary small hypercube around
the equilibrium was removed, at the expense of need-
ing a more refined simplicial complex than in pervi-
ous works. In this paper we will discuss the imple-
mentation of this novel simplicial complex that pos-
sesses a simplicial fan at the equilibrium.
The term simplicial fan seems natural, for math-
49
Freyr Hafstein S..
Implementation of Simplicial Complexes for CPA Functions in C++11 using the Armadillo Linear Algebra Library.
DOI: 10.5220/0004423400490057
In Proceedings of the 3rd International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH-2013),
pages 49-57
ISBN: 978-989-8565-69-3
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
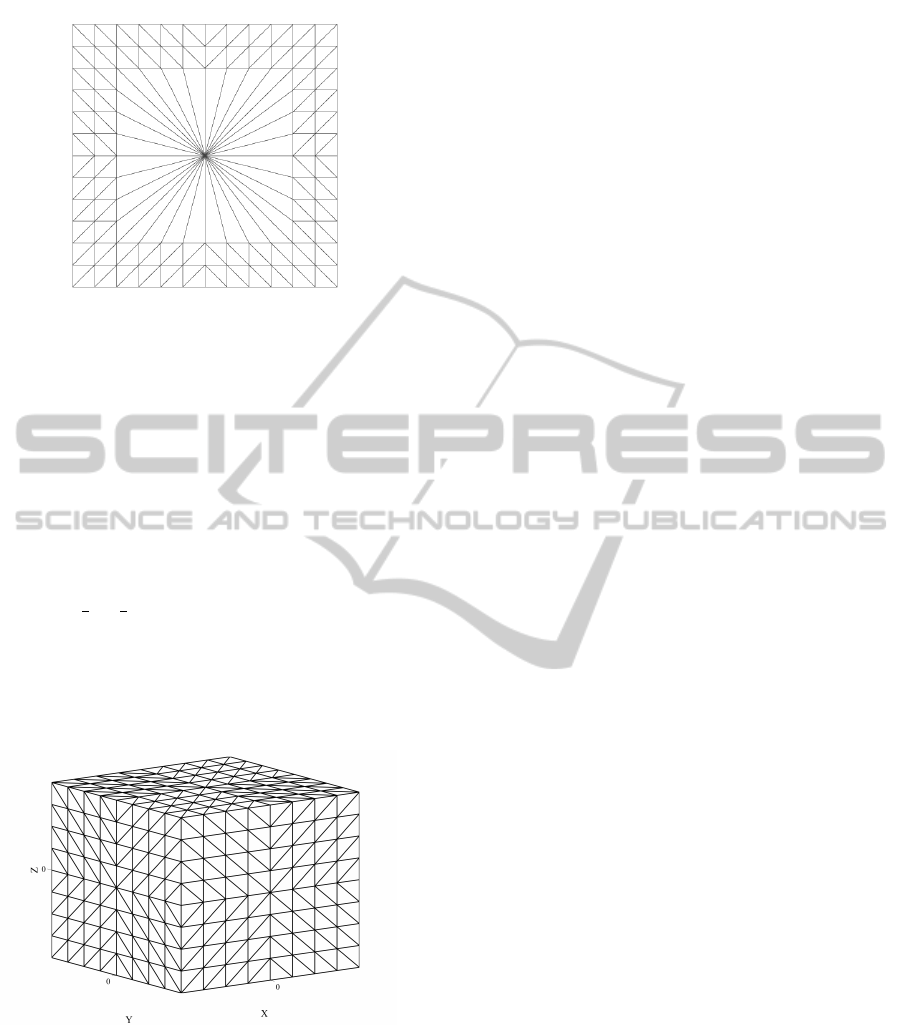
Figure 1: The simplicial complex T
std
N,K
in two dimensions
with K
m
= (−4,−4)
T
,K
p
= (4,4)
T
,N
m
= (−6,−6)
T
, and
N
p
= (6,6)
T
.
ematically it is a straightforward extension of the 3D
graphics primitive triangular fan to arbitrary dimen-
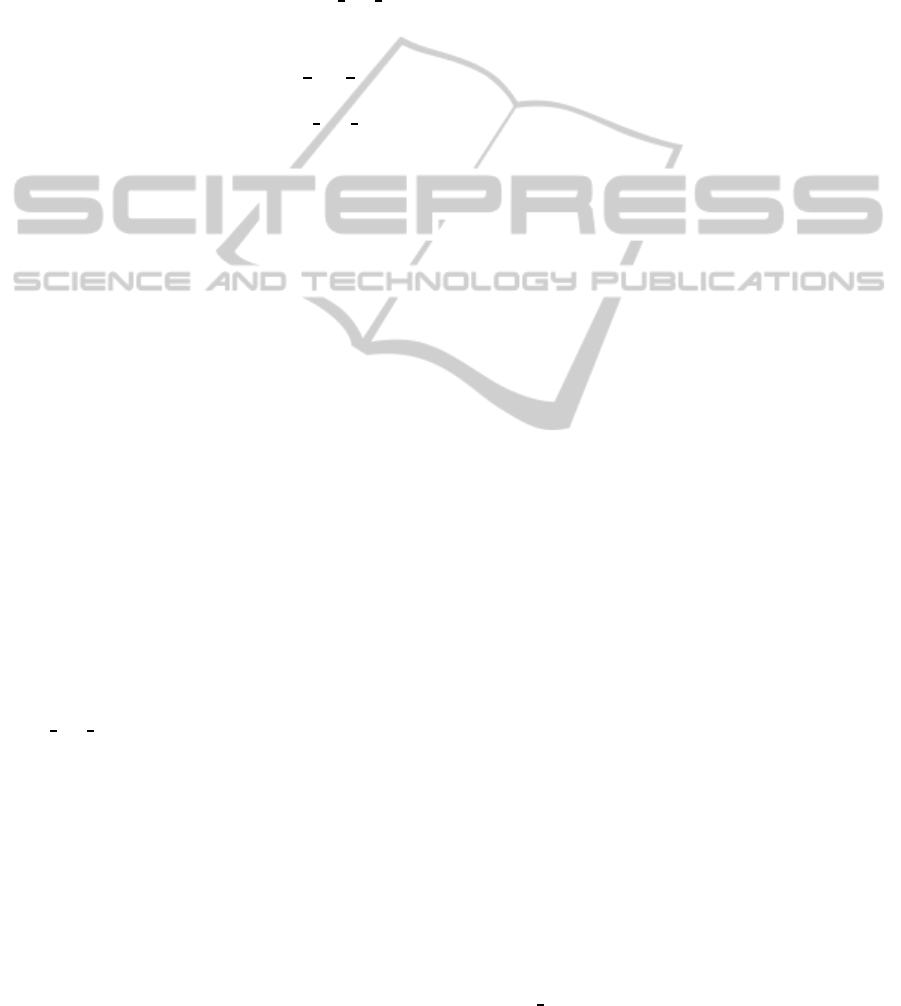
sions. For graphical examples of the simplicial com-
plexes discussed in this paper see Figure 1 and 2.
In Section 2 we define the simplicial complex
mathematically. In Section 3 we give a short descrip-
tion of how to include Armadillo in a VS2012 project
and discuss the basics of the Armadillo library and
then we define in Section 4 the data-structures
Grid,
zJs
, and
T std NK
used to describe the simplicial
complex. In Section 5 we implement the construc-
tion of the complex. We then discuss the efficient im-
plementation of some non-trivial algorithms for the
simplicial complex in Section 6 before making some
conclusions at the end.
Figure 2: A schematic picture of the simplicial complex
T
std
N,K
in three dimensions. By adding the origin as a vertex
to all the simplices in the simplicial 2-complex subdividing
the boundary of the hypercube we get a fan-like simplicial
3-complex (tetrahedra) locally at the origin.
2 SIMPLICIAL COMPLEX T
std
N,K
To define the simplicial omplex T
std
N,K
we first give
a few definitions. We denote by Z, N
0
, and R the
sets of the integers, the nonnegative integers, and the
real numbers respectively. We write vectors in bold-
face, e.g. x ∈ R
n
and y ∈ Z
n
, and their components
as x
1
,x
2
,... ,x
n
and y
1
,y
2
,... ,y
n
. All vectors are as-
sumed to be column vectors. An inequality for vectors
is understood to be component-wise, e.g. x < y means
that all the inequalities x
1
< y
2
,x
2
< y
2
,... ,x
n
< y
n
are fulfilled.
The convex combination of an (m + 1)−tuple
(x
0
,x
1
,... ,x
m
) of vectors x
0
,x
1
,... ,x
m
∈
R
n
is defined by co(x
0
,x
1
,... ,x
m
) :=
{
∑
m
i=0
λ
i
x
i
: 0 ≤ λ
i
≤ 1,
∑
m
i=0
λ
i
= 1}. The set of
vectors x
0
,x
1
,... ,x
m
∈ R
n
is called affinely indepen-
dent if
∑
m
i=1
λ
i
(x
i
− x
0
) = 0 implies λ
i
= 0 for all
i = 1, . . . , m. This definition is independent of the
order of the vectors. If x
0
,x
1
,... ,x
m
∈ R
n
are affinely
independent the set co(x
0
,x
1
,... ,x
m
) is called an
m-simplex.
A triangulation of a set C ⊂ R
n
is the subdivision
of C into n-simplices, such that the intersection of
any two different simplices in the subdivision is ei-
ther empty or a k-simplex, 0 ≤ k < n, and then its
vertices are the common vertices of the two different
n-simplices. Such a structure is often referred to as a
simplicial n-complex.
For the definition of T
std
N,K
we use the set S
n
of all
permutations of the numbers 1,2,..., n, the character-
istic functions χ
J
(i) equal to one if i ∈ J and equal
to zero if i /∈ J , the null vector 0 ∈ R
n
and the stan-
dard orthonormal basis e
1
,e
2
,... ,e
n
of R
n
. Further,
we use the functions R
J
: R
n
→ R
n
, defined for every
J ⊂ {1,2,..., n} by R
J
(x) :=
∑
n
i=1
(−1)
χ
J
(i)
x
i
e
i
.
To construct the triangulation T
std
N,K
, we first de-
fine the triangulations T
std
N
and T
std
K,fan
as intermediate
steps.
1. For every z ∈ N
n
0
, every J ⊂ {1,2, ...,n}, and ev-
ery σ ∈ S
n
define the simplex
S
zJ σ
:= co(x
zJ σ
0
,x
zJ σ
1
,... ,x
zJ σ
n
) (1)
where
x
zJ σ
i
:= R
J
z+
i
∑
j=1
e
σ( j)
!
(2)
for i = 0,1,2,...,n.
2. Let N
m
,N
p
∈ Z
n
, N
m
< 0 < N
p
, and define the
hypercube N := {x ∈ R
n
: N
m
≤ x ≤ N
p
}. The
simplicial complex T
std
N
is defined by
T
std
N
:= {S
zJ σ
: S
zJ σ
⊂ N}. (3)
3. Let K
m
,K
p
∈ Z
n
, N
m
≤ K
m
< 0 < K
p
≤ N
p
,
and consider the intersections of the n-simplices
S
z,J ,σ
in T
std
N
and the boundary of the hyper-
cube K := {x ∈ R
n
: K
m
≤ x ≤ K
p
}. We are
SIMULTECH2013-3rdInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
50

only interested in those intersections that are
(n − 1)-simplices, i.e. co(v
1
,v
2
,... ,v
n
) with ex-
actly n-vertices. For every such intersection
add the origin as a vertex to it, i.e. consider
co(0,v
1
,v
2
,... ,v
n
). The set of such constructed
n-simplices is denoted T
std
K,fan
. It is a triangulation
of the hypercube K.
4. Finally, we define our main simplicial complex
T
std
N,K
by letting it contain all simplices S
zJ σ
in
T
std
N
, that have an empty intersection with the in-
terior K
◦
of K, and all simplices in the simplicial
fan T
std
K,fan
. It is thus a triangulation of N having a
simplicial fan in K.
We have several remarks on this construction. First,
T
std
N,K
is indeed a simplicial complex, as can easily be
deducted from the proof of Lemma 3.6 in (Giesl and
Hafstein, 2013). Second, if K
m
= (−1, − 1,..., −1)
and K
p
= (1,1,...,1) the complexes T
std
N,K
and T
std
N
are identical. Third, when using the complex T
std
N,K
to compute CPA Lyapunov functions one most com-
monly uses a transformation F : R
n
→ R
n
to de-
form and scale down the simplices, i.e. every sim-
plex co(v
0
,v
1
,... ,v
n
) ∈ T
std
N,K
is mapped to a sim-
plex co(F(v
0
),F(v
1
),.. . ,F(v
n
)). The transformation
F must be chosen such that the resulting set of sim-
plices is a simplicial complex.
3 VS2012 AND ARMADILLO
Before we come to our implementation of the sim-
plicial complex T
std
N,K
we explain how to get a project
using the Armadillo linear algebra library running in
VS2012 on a Windowscomputer. This is by no means
the only nor the most elegant way, but it is very simple
and it works.
First download and install Visual Studio Ex-
press 2012 for Windows Desktop. Then go to
http://arma.sourceforge.net and download and extract
Armadillo. Start VS2012 and choose “FILE→New
Project”. In the window that pops up choose
“Visual C++” and “Console Application” and in
the following check “Empty project”. We assume
for simplicity that the name given to the project
is “SIMP” and that the location is “c:\”. The
folder where our program will be running is then
“c:\SIMP\SIMP”. Where armadillo was extracted, in
the “include” folder, there is a file named “armadillo”
and a folder named “armadillo
bits”. Copy both to
“c:\SIMP\SIMP”. In the “examples” folder there is a
folder named “lib
win32”. Also copy its contents to
“c:\SIMP\SIMP”. Many functions in Armadillo use
the LAPACK and BLAS libraries and therefore we
have to uncomment (remove “//” in front of)
#define
ARMAUSELAPACK
and
#define ARMAUSEBLAS
in “con-
fig.hpp” in the folder “armadillo
bits” if we want to
use the full functionality of Armadillo.
To actually use the functionality from LAPACK
and BLAS we have to link to these libraries dy-
namically. To enable that choose “DEBUG→SIMPL
Properties”. In the window that pops up choose
“Configuration Properties→Linker→Input” and add
“lapack
win32 MT.lib;blas win32 MT.lib;” (without
the quotation marks) to “Additional Dependencies”.
Do this both with “Configuration:” on “Release” and
“Debug”.
VS2012 has the unexpected feature (error?)
that it does not search for .dll files in the di-
rectory where the program generated is running,
in our case “c:\SIMP\SIMP”. To change this go
to “Configuration Properties→Debugging” and add
“PATH=%PATH%;$(ProjectDir)” (without the quota-
tion marks) to “Environment”. As before do this both
with “Configuration:” on “Release” and “Debug”.
Now everything should be ready to use Armadillo.
Right-click on “Source files” in the “Solution Ex-
plorer” and choose “Add New Item”. For simplicity
we use the default, which is afile named “Source.cpp”
in “c:\SIMP\SIMP”.
To test if everything is in place we can e.g. try to
compile and run the following program:
#include "armadillo"
#include<list>
// any other headers we might want to include
using namespace arma;
using namespace std;
int main(int argc, char **argv){
mat A=randu<mat>(5,5);
det(A);
}
For our implementation of the simplicial complex be-
low we need to include
list.
We also use
vector
and
algorithm
from the Standard Template Library
(STL), but they are already included in
armadillo.
To compile and run a console application it is ad-
vantageous to choose “DEBUG→Start Without De-
bugging” (or press Ctrl+F5), for otherwise the con-
sole closes immediately when the program has fin-
ished running. This procedure above has been tested
to work with Armadillo 3.8.0.
Now a few comments on Armadillo: Very
good documentation on the library is available at
http://arma.sourceforge.net and in (Sanderson, 2010).
The vector and matrix types we will use in this paper
are
ivec
,
vec
, and
mat
, which are column vector of
int
, column vector of
double
, and matrix of
double
respectively. Armadillo starts indexing of vectors and
matrices at zero and not at one, just as in C and C++.
ImplementationofSimplicialComplexesforCPAFunctionsinC++11usingtheArmadilloLinearAlgebraLibrary
51

Note that Armadillo does not support implicit or ex-
plicit conversions between vector and matrix types
only because they might make sense mathematically.
If e.g.
f
is a function expecting a
vec
as an argument
we cannot call it with an
ivec vi.
We have to use
convto<vec>::from(vi)
to explicitly convert
vi
to
a
vec.
The compiler expects the result of a matrix multi-
plication to be a matrix. If we know that it is a scalar
(1 × 1 matrix) the function
as scalar
can be used,
e.g.
double y=asscalar(x.t()*x);
for a vector
x.
In debug modus
as scalar
will report an error if the
argument is not a 1× 1 matrix, in release modus it will
simply give incorrect results. Using the “
<<
” operator
is a short and readable way to assign values to vec-
tors and matrices (
endr
stands for end row). It, how-
ever, does not work like
pushback
in the STL. Thus
x<<1<<2;
makes
x
= (1,2)
T
. But if this is followed
by
x<<3<<4;
then
x
= (3,4)
T
and not
x
= (1,2,3,4)
T
Lambda functions in C++11, functions that can
be written within other functions and have access
to their data, are a very nice addition to C++, but
there are some pitfalls when using Armadillo. It is
safer to specify the return value of a lambda function,
for e.g.
[](vec v)
{
return 1*v;
} otherwise returns
an object of type
const eOp<vec,eopscalartimes>,
but
[](vec v)->vec
{
return 1*v;
} returns a
vec.
A further nice addition in C++11 are auto types. Thus,
if the compiler can determine the type of an entity at
compile time, it will assign that type to the entity if it
is declared
auto.
For vectors
x,y
of type
vec
or
ivec
compar-
isons like
x > y
return a vector with 1 in the entities
where the inequality holds true and 0 otherwise. Thus
(1,2,3)
T
< (2,2, 4)
T
results in the vector (1,0,1)
T
. If
we want a simple true or false answer to whether the
inequality is true for all components we can e.g. use
min(x-y) > 0
.
With the compiler set to “debug” operations in Ar-
madillo are orders of magnitude slower than with the
compiler set to “release”.
4 THE DATA STRUCTURES
We use the data structures
Grid, zJs
, and
T std NK
to implement the simplicial complex T
std
N,K
.
Grid
is
used to enumerate the vectors in {z ∈ Z
n
: z ∈ N}
and other similar grids,
zJs
is a simple container for
z ∈ N
n
0
, J ⊂ {1,2,...,n}, and σ ∈ S
n
and is used to lo-
cate the simplex S
zJ σ
in the data structure
T std NK
,
which contains all necessary information on the com-
plex T
std
N,K
. For simplicity and to shorten the code we
use very short variable names and do not care about
data encapsulation at all. Further, we omit declaring
functions const and using const references and un-
signed types, even where it would be more natural and
efficient. We make heavy use of the STL in C++ and
assume that the dimension, i.e. n in R
n
, is already de-
fined by e.g.
int n=4;
.
The data structure
Grid
, initialized with
ivec Nm
and
ivec pN
contains all the vertices in G(Nm,Np) :=
{z ∈ Z
n
: Nm ≤ z ≤ Np}. It assigns a unique integer
to each of these vertices and can calculate the corre-
sponding vertex from this number and vise versa. It is
defined as follows:
struct Grid {
ivec mN, pN;
int EndI;
int V2I(ivec);
ivec I2V(int);
vector<int> V2I(vector<ivec> v);
bool InGrid(ivec v);
Grid(ivec _mN,ivec _pN);
˜Grid() {};
};
The numbers assigned to the vectors are 0,1, . . .,N,
where N = EndI − 1. Thus, the constructor can be
coded
Grid::Grid(ivec _Nm,ivec _Np):Nm(_Nm),Np(_Np){
EndI=1;
for(int i=0;i<n;i++){EndI *= Np(i)-Nm(i)+1;}
}
A simple method to assign unique numbers to the ver-
tices is to translate them with the vector
-Nm
and then
enumerate them starting at the origin. The reverse
process is done by using repeated division with re-
minder. The following implementation of the pair
V2I
(vertex to index) and
I2V
(index to vertex) should il-
luminate the strategy:
int Grid::V2I(ivec v){
int i, Index, Mul;
v -= Nm;
for(i=0,Mul=1,Index=0;i<n;i++){
Index += v(i)*Mul;
Mul *= Np(i)-Nm(i)+1;
}
return Index;
}
ivec Grid::I2V(int Index){
ivec v(n);
for(int i=0;i<n;i++){
v(i) = Index%(Np(i)-Nm(i)+1);
Index /= Np(i)-Nm(i)+1;
}
return v += Nm;
}
Further, it is advantageous to be able to pass a
vector of vertices to
V2I
. This is implemented by
vector<int> Grid::V2I(vector<ivec> v),
SIMULTECH2013-3rdInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
52

where it can be seen how lambda functions can lead
to efficient and readable code:
vector<int> Grid::V2I(vector<ivec> v){
vector<int> iv;
for_each(v.begin(),v.end(),
[&](ivec &val){iv.push_back(V2I(val));}
);
return iv;
}
The
[&]
allows the lambda function access to all vari-
ables of the enclosing function by reference, in this
case
iv
and
this
. Note that the call to
V2I(val)
is an abbreviation for
this->V2I(val)
and thus the
this
pointer is implicitly used. If we want the lambda
function to use copies of the variables by default we
should replace
[&]
by
[=]
. We could also have listed
their access mode individually by
[iv&,this]
, be-
cause we need to modify
iv
in the lambda function
but not
this
.
Only one more member function is needed for
Grid,
bool InGrid(ivec v),
which returns
true
if
v ∈ G(Nm,Np) and
false
otherwise. Here the Ar-
madillo functions
min
and
max,
which deliver the
minimum and maximum values of a vector respec-
tively, are useful:
bool Grid::InGrid(ivec v){
return min(v-Nm) >= 0 && max(v-Np) <= 0;
}
We now come to the structure
zJs
. It is a simple con-
tainer, on which we define an ordering relation “<”.
The ordering is used by
T std NK
to sort and then find
simplices referred to by z ∈ N
0
, J ⊂ {1,2,...,n}, and
σ ∈ S
n
quickly. The variable
int Pos
in
zJs
is the
positioning used by
T std NK
.
struct zJs {
int J,Pos;
ivec z,sig;
zJs(ivec _z,int _J,ivec _sig,int _Pos=-1):
z(_z), J(_J), sig(_sig), Pos(_Pos) {};
};
The set J ⊂ {1,2,...,n} is stored as an integer
J
.
The idea is to use the representation of
J
as a binary
number to mark which elements of {1,2,... , n} are
in J and which are not. This is best shown by ex-
amples. The number 0 = (00...0000)
2
is the empty
set, 1 = (0...0001)
2
is the set {1}, 2 = (0. .. 0010)
2
is the set {2}, 3 = (0...0011)
2
is the set {2,1}, and
e.g. 12 = (0. . . 01010)
2
is the set {4,2}. In general,
j ∈ J if and only if the j-th bit in the binary rep-
resentation of
J
is 1. To check whether j ∈ J one
can use bit-shifts and the bitwise and-operation “&”,
i.e.
(J>>(j-1))&1
is one if j ∈ J and zero other-
wise. For
int J
this works for n ≤ 31, for
unsigned
long long J
this works for n ≤ 64. For n > 64 this
strategy has to be refined.
The permutation σ ∈ S
n
is stored as an
ivec
sigma
in its one-line notation, i.e. it is defined through
sigma[i]
= σ(i). Here the fact that Armadillo starts
indexing of vectors at zero is a little confusing, be-
cause
sigma
is a reordering of the indices. Thus
sigma[0], sigma[1],
...
, sigma[n-1]
is actually a
permutation of the numbers 0,1, . . .,n− 1 rather than
the numbers 1,2,...,n. We discuss the interplay be-
tween
J
and
sigma
in more detail in the next sec-
tion, when we give the implementation of
x zJs i
that computes the vertices x
zJ σ
i
according to the for-
mula (2).
The ordering relation on
zJs
is rather arbitrary,
it should just order objects of type
zJs
according to
z,J,
and
sig
adequate to the STL functions
sort
and
equalrange
somehow.
Pos
should not be considered
in the ordering. The following definition does the job
just fine:
bool operator<(zJs lhs,zJs rhs){
if(lhs.J != rhs.J) return lhs.J < rhs.J;
int i;
for(i=0;i<n && lhs.z(i)==rhs.z(i);i++);
if(i!=n){return lhs.z(i)<rhs.z(i);}
for(i=0;i<n && lhs.sig(i)==rhs.sig(i);i++);
if(i!=n){return lhs.sig(i)<rhs.sig(i);}
return false; // they are equal
}
We come to the main structure
T std NK
that de-
scribes the simplicial complex T
std
N,K
. It is defined as
follows:
struct T_std_NK {
ivec Nm,Np,Km,Kp;
Grid G;
int Nr0;
vector<ivec> Ver;
vector<vector<int>> Sim;
vector<zJs> NrInSim;
vector<int> Fan;
int InSimpNr(vec x); // -1 if not found
bool InSimp(vec x,int ind);
T_std_NK(ivec Nm,ivec Np,ivec Km,ivec Kp);
};
Nm
= N
m
and
Np
= N
p
define the hypercube N and
Km
= K
m
and
Kp
= K
p
define the hypercube K from
Section 2.
G
is a grid defined by
Nm
and
Np
and is used
to have a coherent enumerationof all vertices possibly
used by
T std NK
.
Ver
is a vector containing all the
vertices of all the simplices in the complex and
Nr0
is the position of the zero vector/vertex in this vector,
i.e.
Ver[Nr0]
is the zero-vector.
Sim
is a vector con-
taining all the simplices of the complex. A simplex is
basically (n+ 1) vertices. Each simplex is stored as a
vector of (n+1)-integers, the integers refereing to the
positions of the corresponding vertices in
Ver
.
The remaining members are not used for the con-
struction of the simplicial complex. They are, how-
ImplementationofSimplicialComplexesforCPAFunctionsinC++11usingtheArmadilloLinearAlgebraLibrary
53
ever, advantageous if one wants to use the simplicial
complex as a basis to define CPA functions, because
given a vector x in the triangulated hypercube N, they
enable the fast search of a simplex S such that x ∈ S.
NrInSim
contains all simplices of thekind S
zJ σ
in the
complex sorted according to the ordering on
zJs
.
Fan
contains the rest of the simplices, i.e. the simplices
in the simplicial fan at the origin. We discuss this in
more detail after the next section, in which we discuss
the construction of the simplicial complex
T std NK
.
5 CONSTRUCTION OF T
std NK
To construct the simplicial complex
T std NK
we
need a function to compute the vertices x
zJ σ
i
as in for-
mula (2), i = 0, 1, . . .,n, for the simplices S
zJ σ
. As
mentioned in the last section the interplay between
J
and
sigma
here play a little confusing role. Be-
cause the set
J
is supposed to contain the indices of
those coordinates of a vector v, whose coordinates
should be multiplied with minus one, and Armadillo
starts indexing of vectors at zero, we should multi-
ply the coordinate
v[j],
which corresponds to the
coordinate v
j+1
of v, by minus one, if and only if
(J>>((j+1)-1))&1,
i.e.
(J>>j)&1,
is equal to one.
Further,
sigma
is actually a permutation of the num-
bers 0,1,... , n − 1 as discussed above. The formula
(2) for x
zJ σ
i
, i = 0,1,..., n, can thus be implemented
as follows:
ivec x_zJs_i(ivec z,int J,ivec sigma,int i){
ivec x_s_i=zeros<ivec>(n), v(n);
for(int j=0;j<i;j++){
x_s_i(sigma(j))=1;
}
for(int j=0;j<n;j++){
v(j)=((J>>j)&1 ? -1:1)*(z(j)+x_s_i(j));
}
return v;
}
We now have everything we need to actually con-
struct
T std NK
. The code for the construction can
be partitioned into three parts. In the first part some
variables and class members are initialized. This is
done in an initializer list and at the beginning of the
function. In the second part we actually construct
the simplicial complex. This involves a triple loop,
for we have to iterate over all relevant z ∈ N
n
0
, all
J ⊂ {1, 2, . ..,n}, and all σ ∈ S
n
, cf. formulas (1) and
(2). In the third part we tidy up, which includes sort-
ing some vectors to make them eligible for binary
search, removing duplicates, etc. The body of the im-
plementation for the constructor is as follows:
T_std_NK::T_std_NK(ivec _Nm,ivec _Np,
ivec _Km,ivec _Kp) : Nm(_Nm), Np(_Np),
Km(_Km),Kp(_Kp),G(_Nm,_Np) {
// FURTHER INITIALIZATION
int EndSet=1<<n;
ivec ZV=zeros<ivec>(n),pQ1N(n),
IdPerm(n),sigma(n),*pivec,z;
int N=max(max(Np),max(-Nm));
pQ1N.fill(N-1);
for(int i=0;i<n;i++) IdPerm(i)=i;
vector<ivec> sver(n+1);
Grid Q1(ZV,pQ1N);
Grid Ki(Km+1,Kp-1);
// ACTUAL CONSTRUCTION OF THE COMPLEX
for(int J=0;J<EndSet;J++){
for(int zNr=0;zNr<Q1.EndI;zNr++){
z=Q1.I2V(zNr);
sigma = IdPerm;
auto sb=sigma.begin(),se=sigma.end();
do{
// CODE BLOCK 1
// ...
}while(next_permutation(sb,se))
;
}
}
// TIDY UP
// CODE BLOCK 2
// ...
}
We first concentrate on the initialization, the imple-
mentation of
CODE BLOCK 1
and
CODE BLOCK 2
is
given below. In the initializer list we assign values
to the pairs
Nm, Np
and
Km, Kp
. They correspond to
the vectors N
m
,N
p
and K
m
,K
p
respectively, that de-
fine the hypercubes N and K as in Section 2. N \ K
◦
is triangulated using the simplices S
zJ σ
and K is tri-
angulated using a simplicial fan. The grid
G(Nm,Np)
includes all vectorsz ∈ Z
n
that might be vertices in the
triangulation.
EndSet
:= 2
n
is chosen such that every
subset J of {1, 2, . ..,n} has a unique representation as
a number
J
= 0,1,..., EndSet −1 as described above.
The grid
Q1
is defined with just enough vectors z∈ N
n
0
to suffice for the construction of all S
zJ σ
relevant for
T
std
N
, cf. (3). The grid
Ki
is defined such that the rel-
evant intersections of simplices S
zJ σ
⊂ N with the
boundary of K := {x ∈ R
n
: K
m
≤ x ≤ K
p
} are char-
acterized by having exactly one vertex in
Ki
. That we
get any relevant intersection by this characterization is
quite clear. The fact that we get every relevant inter-
section no more than once can be deduced by consid-
ering the intersection of two different such simplices,
which would clearly not be an allowed intersection of
two different simplices in a simplicial complex.
IdPerm
is defined to be the permutation
IdPerm[i]=i
for i = 0,1, ...,n − 1. The func-
tion
nextpermutation
from the STL considers
this to be the first permutation. Successive calls to
SIMULTECH2013-3rdInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
54

nextpermutation
then iterates through all possible
permutations.
For the actual construction of the simplicial com-
plex we iterate over all z ∈
Q1
⊂ N
n
0
, all permutations
sigma
of the numbers 0,1,... , n− 1, and all subsets J
of {1, 2, . . .,n}. The z are represented through their
unique numbers in
Q1
, the permutations are repre-
sented through their one-line form, and the subsets
through numbers 0,1,..., 2
n
− 1. The code for the ac-
tual construction is as follows:
// CODE BLOC 1 - IMPLEMENTATION
for(int i=0;i<=n;i++){
sver[i] = x_zJs_i(z,J,sigma,i);
}
int NrInN=0,NrInKi=0;
for_each(sver.begin(),sver.end(),
[&] (ivec &v) {
if(G.InGrid(v)) NrInN++;
if(Ki.InGrid(v)){
pivec=&v; NrInKi++;
}
}
);
if(NrInN == n+1){
if(NrInKi == 0){
Sim.push_back(G.V2I(sver));
int SLE=Sim.end()-Sim.begin()-1;
NrInSim.push_back(zJs(z,J,sigma,SLE));
} else if(NrInKi == 1){
*pivec=sver[0];
sver[0]=ZV;
Sim.push_back(G.V2I(sver));
int SLE=Sim.end()-Sim.begin()-1;
Fan.push_back(SLE);
}
}
First we construct the simplex S
zJ σ
=
co(x
zJ σ
0
,x
zJ σ
1
,... ,x
zJ σ
n
) by writing its vertices to
sver,
i.e.
sver[i]
:=x
zJ σ
i
for i = 0,1,2...,n.
Then we count how many of the vertices are in
N and K
◦
. Note that x
zJ σ
i
∈ N if and only if
G.InGrid(sver[i]) == true
and x
zJ σ
i
∈ K
◦
if
and only if
Ki.InGrid(sver[i]) == true.
If
x
zJ σ
i
∈ K
◦
we tactically store a pointer to its corre-
sponding
sver[i].
Then we verify if S
zJ σ
∈ T
std
N
,
i.e. if S
zJ σ
⊂ N, which holds true if and ony if
NrInN == n+1.
Now there are two relevant cases.
One is if no vertex is in K
◦
, i.e.
NrInKi == 0.
Then
the simplex is added as is to
Sim
, however, using the
unique numbers given to its vertices by
G
. We then
record its position in
NrInSim
to give fast access to
it later through the data structure
zJs
. If exactly one
vertex, say
sver[i]
= x
zJ σ
i
, is in K
◦
, i.e.
NrInKi
== 1,
then we modify this simplex and add it to
the simplicial fan. We first copy
sver[0]
= x
zJ σ
0
to
sver[i]
and then the zero vector
ZV
to
sver[0]
.
Then we add it to
Sim
and record its position in
Fan.
Now that we have constructed the simplicial com-
plex we tidy up and prepare the simplicial complex
for efficient application. This is implemented as fol-
lows:
// CODE BLOC 2 - IMPLEMENTATION
// record all vertices
list<int> lv;
for_each(Sim.begin(),Sim.end(),
[&](vector<int> &v){
for_each(v.begin(),v.end(),
[&](int iv){
lv.push_back(iv);
}
);
}
);
lv.sort();
lv.unique();
vector<int> vID(lv.size());
vID.assign(lv.begin(),lv.end());
Nr0=equal_range(vID.begin(),vID.end(),
G.V2I(ZV)).first - vID.begin();
// let the simplices in "Sim" refer to the
// vertices by their positions in vID rather
// than their ID-number from "Grid G"
for_each(Sim.begin(),Sim.end(),
[&](vector<int> &v){
for_each(v.begin(),v.end(),
[&](int &iv){
iv=equal_range(vID.begin(),vID.end(),
iv).first - vID.begin();
}
);
}
);
// record the vertices in "Ver" in the same
// order as in vID
for_each(vID.begin(),vID.end(),
[&](int vID){
Ver.push_back(G.I2V(vID));
}
);
// sort "NrInSim" and "Fan" for binary search
sort(NrInSim.begin(),NrInSim.end());
sort(Fan.begin(),Fan.end());
To record all the vertices in the complex we first add
all vertex ID-numbers of all simplices to the list
lv
,
sort it and use
unique
to remove duplicates. Then we
copy the contents of
lv
to the vector
vID
to be able
to apply efficient binary search, i.e. the STL function
equalrange.
Further, we record the position
Nr0
of
the zero vertex in
vID.
Then we go through all vertices of all the sim-
plices and replace the ID-number of every vertex by
its position in
vID
. Then we actually construct the ver-
tices as
ivec
and write them in
Ver
in the same order
as in
vID
. Thus
Ver[Sim[k][i]]
is the i-th vertex
of the k-th simplex in
Sim
. Finally, we sort
NrInSim
ImplementationofSimplicialComplexesforCPAFunctionsinC++11usingtheArmadilloLinearAlgebraLibrary
55

and
Fan,
again to be able to efficiently apply the STL
function
equalrange.
Thus given
z,J,
and
sigma
for a simplex S
zJ σ
we can efficiently locate it in
Sim
and given the position of a simplex in
Sim
we can effi-
ciently check whether it is in the simplicial fan, i.e. in
Fan,
or not. We take advantage of the former prop-
erty in the function
int InSimplexNr(vec x),
dis-
cussed in the next section. The second property is not
important for the applications described in this paper,
but is useful for other applications.
6 ALGORITHMS FOR T
std NK
If the data structure
T std NK
is to be useful for serv-
ing as a basis for CPA functions, we have to be able to
efficiently solve the following problem: For an arbi-
trary x ∈ N find a simplex S ∈ T
std
N,K
such that x ∈ S.
In this section we implement this efficiently given that
the simplicial fan contains a small fraction of the total
number of simplices in the complex. If this is not the
case a different strategy should be used, e.g. storing
an appropriate
zJs
for simplices in the simplicial fan
and project x ∈ K to the boundary of K and search
for this appropriate
zJs.
For demonstrating our ideas
the following is, however, more informative, because
it includes ideas necessary to solve this problem when
T
std
N,K
has been deformed as explained in Section 2.
Given a simplex S = co(v
0
,v
1
,v
2
,... ,v
n
) and a
vector x ∈ R
n
, x ∈ S if and only if x can be written
as a convex combination of the vertices of the sim-
plex. This means that there are nonnegative numbers
λ
0
,λ
1
,... ,λ
n
, such that
x =
n
∑
i=0
λ
i
v
i
, where
n
∑
i=0
λ
i
= 1, (4)
which in turn is equivalent to
x− v
0
=
n
∑
i=1
λ
i
(v
i
− v
0
), where
n
∑
i=1
λ
i
≤ 1. (5)
We construct the matrix X by writing the vectors
v
1
− v
0
,v
2
− v
0
,... ,v
n
− v
0
in its columns conse-
quently. Because the vertices of a simplex are affinely
independent, the equation x − v
0
= XL always has
a solution L = (λ
1
,λ
2
,... ,λ
n
)
T
. If the solution ful-
fills λ
i
≥ 0 for all i = 1,2,... , n and
∑
n
i=1
λ
i
≤ 1, then
x ∈ S, otherwise x /∈ S. Thus we can implement
bool T std NK::InSimp(vec x,int ind),
which
returns
true
if
vec x
is in the simplex
Sim[ind]
and
false
otherwise, as follows:
bool T_std_NK::InSimp(vec x,int ind){
vector<vec> v(n+1);
for(int i=0;i<=n;i++){
ivec t=Ver[Sim[ind][i]];
v[i]=conv_to<vec>::from(t);
}
mat X(n,n);
for(int i=1;i<=n;i++){
X.col(i-1)=v[i]-v[0];
}
vec L=solve(X,x-v[0]);
return min(L) >= 0 && sum(L) <= 1;
}
The code is self explaining. The connection to CPA
functions f : N → R, defined by giving its values f(v)
at every vertex v of every simplex of T
std
N,K
is as fol-
lows: If x =
∑
n
i=0
λ
i
v
i
∈ co(v
0
,v
1
,v
2
,... ,v
n
), then
f(x) = f(
n
∑
i=0
λ
i
v
i
) =
n
∑
i=0
λ
i
f(v
i
), (6)
as can be easily verified. Because λ
0
= 1 −
∑
n
i=1
λ
i
the solution L thus gives us a formula for the function
value.
Going through all simplices S ∈ T
std
N,K
to check
whether a given x ∈ S is not very efficient and if x ∈
N \ K
◦
we can do much better. In this case we know
that x ∈ S
zJ σ
for some z ∈ N
n
0
, J ⊂ {1,2,...,n}, and
σ ∈ S
n
, and if we calculate z, J , and σ directly from
x we can find the simplex S
zJ σ
using binary search
in the vector
NrInSim.
To compute z and J we first
construct a vector y = (y
1
,y
2
,... ,y
n
)
T
and an inte-
ger J. We do this by going through the entities x
i
of
x. If x
i
≥ 0 we set y
i
= x
i
and the i-th bit of the bi-
nary representation of J equal to zero. If x
i
< 0 we
set y
i
= −x
i
and the i-th bit in the binary representa-
tion of J equal to one. After this procedure the inte-
ger J characterizes the set J as discussed in Section 4
and z = (z
1
,z
2
,... , z
n
)
T
can be computed by z
i
= ⌊y
i
⌋
(largest integer ≤ y
i
) for i = 1,2, ...,n. Now clearly
y ∈ S
z
/
0σ
, i.e. y ∈ S
zJ
∗
σ
with J
∗
=
/
0 the empty set,
and it is easily verified that
w := y− z =
n
∑
i=1
λ
i
i
∑
j=1
e
σ( j)
=
n
∑
i=1
n
∑
j=i
λ
j
!
e
σ(i)
. (7)
Because all the λ
j
are nonnegative we have the rela-
tion
1 ≥ w
σ(1)
≥ w
σ(2)
≥ ... ≥ w
σ(n)
≥ 0 (8)
for w = (w
1
,w
2
,... , w
n
)
T
. Thus, if we sort the en-
tities of w in decreasing order and record the corre-
sponding indices we have computed σ. The function
sortindex(w,1)
in Armadillo does exactly this (the
optional argument
1
specifies descending sort).
In the implementation of
int
T
std NK::InSimpNr(vec x),
that returns the
position in
Sim
of a simplex containing
vec x
if
possible and −1 otherwise, we first check if
x
is
in the domain of the simplicial complex. Then we
SIMULTECH2013-3rdInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
56

check if
x
is (only) in the domain of the simplicial
fan. If it is we go through all simplices in the fan to
find a simplex containing
x
. If
x
is in the domain of
the simplicial complex, but not in the fan, we use the
efficient strategy of computing a simplex containing
it as described above. The code has, obviously, to
be adapted to the fact that Armadillo indexes vectors
from zero. The implementation is as follows:
int T_std_NK::InSimpNr(vec x){
if(!(min(Np-x)>0 && min(x-Nm)>0)){
return -1;
}
if(min(Kp-x)>0 && min(x-Km)>0){
for(int i=0;i<Fan.size();i++){
if(InSimp(x,Fan[i])){
return Fan[i];
}
}
}
// WE CAN COMPUTE THE POSITION OF THE SIMPLEX
int J=0;
ivec z(n),sig; // sig=sigma
for(int i=0;i<n;i++){
if(x(i)<0){
x(i)=-x(i);
J |= 1<<i;
}
z(i)=static_cast<int>(x(i));
}
sig=conv_to<ivec>::from(sort_index(x-z,1));
return equal_range(NrInSim.begin(),
NrInSim.end(),zJs(z,J,sig)).first->Pos;
}
We havea fewcomments on this implementation. The
command
J |= 1<<i;
sets the (i+ 1)-th bit of the bi-
nary representation of J equal to 1. Because the enti-
ties of
x
are all nonnegativewhen we want to compute
their floor, we can simply cast from
double
to
int
.
The Armadillo function
sortindex
returns a vector
of unsigned integers that describes the sorted order
of the given vector’s elements. The optional second
parameter can be set to 1 to let
sortindex
use de-
scending sort, otherwise it uses the default, which is
ascending sort.
7 SUMMARY
We described the implementation of a simplicial com-
plex with a simplicial fan at the origin. Such com-
plexes allow for the parameterizations of continuous,
piecewise affine (CPA) functions, with an arbitrary
rich structure at a singularity. Such CPA functions
have been shown to be irreplaceable in the computa-
tion of true CPA Lyapunov functions for general non-
linear systems. We used C++11 and the Armadillo
linear algebra library for the implementation and we
discussed some of the advantages of doing so in the
paper. Thus, the paper might be of interest to sci-
entists and engineers interested in modern numerical
programming in C++11 under Windows, even if they
are not necessarily interested in our particular prob-
lem of implementing simplicial complexes for CPA
functions.
REFERENCES
Eghbal, N., Pariz, N., and Karimpour, A. (2012). Discon-
tinuous piecewise quadratic Lyapunov functions for
planar piecewise affine systems. J. Math. Anal. Appl.,
399, pp. 586–593.
Giesl, P. (2007). Construction of Global Lyapunov Func-
tions Using Radial Basis Functions. Lecture Notes in
Mathematics, 1904, Springer.
Giesl, P. and Hafstein, S. (2012). Existence of piecewise lin-
ear Lyapunov functions in arbitary dimensions, Dis-
crete Contin. Dyn. Syst., 32, pp. 3539–3565.
Giesl, P. and Hafstein, S. (2013). Revised CPA method to
compute Lyapunov functions for nonlinear systems.
(submitted)
Hafstein, S. (2004). A constructive converse Lyapunov the-
orem on exponential stability. Discrete Contin. Dyn.
Syst., 10, pp. 657–678.
Hafstein, S. (2005). A constructive converse Lyapunov
theorem on asymptotic stability for nonlinear au-
tonomous ordinary differential equations. Dynamical
Systems, 20, pp. 281–299
Johansen, T. (2000). Computation of Lyapunov Functions
for Smooth Nonlinear Systems using Convex Opti-
mization. Automatica, 36, pp. 1617–1626.
Johansson, M. and Rantzer, A. (1997). On the computa-
tion of piecewise quadratic Lyapunov functions. In:
Proceedings of the 36th IEEE Conference on Decision
and Control.
Julian, P., Guivant, J., and Desages, A. (1999). A
parametrization of piecewise linear Lyapunov func-
tion via linear programming Int. Journal of Control,
72, pp. 702–715.
Marinosson, S. (2002a). Lyapunov function construction
for ordinary differential equations with linear pro-
gramming. Dynamical Systems, 17, pp. 137–150.
Marinosson, S. (2002b). Stability analysis of nonlinear sys-
tems with linear programming: A Lyapunov functions
based approach. Ph.D. Thesis: Gerhard-Mercator-
University, Duisburg, Germany.
Peet, M. and Papachristodoulou, A. (2010). A converse
sum-of-squares Lyapunov result: An existence proof
based on the Picard iteration. In: 49th IEEE Confer-
ence on Decision and Control, pp. 5949–5954.
Rezaiee-Pajand, M. and Moghaddasie, B. (2012). Estimat-
ing the Region of Attraction via collocation for au-
tonomous nonlinear systems. Struct. Eng. Mech., 41-
2, pp. 263–284.
Sanderson, C. (2010). Armadillo: An Open Source C++
Linear Algebra Library for Fast Prototyping and
Computationally Intensive Experiments. Technical
Report, NICTA.
ImplementationofSimplicialComplexesforCPAFunctionsinC++11usingtheArmadilloLinearAlgebraLibrary
57
