
Updating Strategies of Policies for Coordinating Agent Swarm
in Dynamic Environments
Richardson Ribeiro
1
, Adriano F. Ronszcka
1
, Marco A. C Barbosa
1
,
Fábio Favarim
1
and Fabrício Enembreck
2
1
Department of Informatic, Federal University of Technology - Parana, Pato Branco, Brazil
2
Pos-Graduate Program in Computer Science, Pontificial Catholical University - Parana, Curitiba, Brazil
Keywords: Swarm Intelligence, Ant-Colony Algorithms, Dynamic Environments.
Abstract: This paper proposes strategies for updating action policies in dynamic environments, and discusses the
influence of learning parameters in algorithms based on swarm behavior. It is shown that inappropriate
choices for learning parameters may cause delays in the learning process, or lead the convergence to an un-
acceptable solution. Such problems are aggravated in dynamic environments, since the fit of algorithm pa-
rameter values that use rewards is not enough to guarantee a satisfactory convergence. In this context, strat-
egy-updating policies are proposed to modify reward values, thereby improving coordination between
agents operating within dynamic environments. A framework has been developed which iteratively demon-
strates the influence of parameters and updating strategies. Experimental results are reported which show
that it is possible to accelerate convergence to a consistent global policy, improving the results achieved by
classical approaches using algorithms based on swarm behavior.
1 INTRODUCTION
When properly applied, coordination between agents
can help to make the execution of complex tasks
more efficient. Proper coordination can help to avoid
such complications as finding redundant solutions to
a sub-problem, inconsistencies of execution (such as
up-dating obsolete sub-problems), loss of resources,
and deadlocks (waiting for events which will proba-
bly not occur) (Wooldridge, 2002).
Real-world activities which require coordinated
action include traffic environments (Ribeiro et al.,
2012), sensor networks (Mihaylov et al., 2009),
supply chain management (Chaharsooghi et al.,
2008), environmental management, structural mod-
eling, and dealing with the consequences of natural
disasters. In such applications agents act in uncertain
environments which change dynamically. Thus,
autonomous decisions must be taken by agents
themselves in the light of what they perceive locally.
In such applications, agents must decide upon
courses of action that take into account the activities
of other agents, based on knowledge of the environ-
ment, limitations of resources and restrictions on
communication. Methods of coordination must be
used to manage consequences that result when
agents have inter-related objectives: in other words,
when agents share the same environment or share
common resources.
The paradigm for coordination based on swarm
intelligence has been extensively studied by a num-
ber of researchers (Dorigo, 1992), (Kennedy et al.,
2001), (Ribeiro and Enembreck, 2012), (Sudholt,
2011). It is inspired by the behavior of colonies of
social insects, with computational systems reproduc-
ing their behavior exhibited when solving collective
problems: typically the colonies are those of ants,
bees, woodlice or wasps. Such colonies have desira-
ble characteristics (adaptation and coordination)
which find solutions to computational problems
needing concerted activity. Earlier research on the
organization of social insect colonies and its applica-
tions for the organization of multi-agent systems has
shown good results for complex problems, such as
combinatorial optimization (Dorigo and Gam-
bardella, 1996).
However, one of the main difficulties with such
algorithms is the time required to achieve conver-
gence, which can be quite expensive for many real-
world applications. In such applications, there is no
345
Ribeiro R., F. Ronszcka A., A. C. Barbosa M., Favarim F. and Enembreck F..
Updating Strategies of Policies for Coordinating Agent Swarm in Dynamic Environments.
DOI: 10.5220/0004443703450356
In Proceedings of the 15th International Conference on Enterprise Information Systems (ICEIS-2013), pages 345-356
ISBN: 978-989-8565-59-4
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

guarantee that reward-based algorithms will con-
verge, since it is well known that they were initially
developed and used to cope with static problems
where the objective function is invariant over time.
However, few real-world problems are static in
which changes of priorities for resources do not
occur, goals do not change, or where there are tasks
that are no longer needed. Where changes are need-
ed through time, the environment in which agents
operate is dynamic.
The use of methods based on insect behavior, of
ant colonies in particular, has drawn the attention of
researchers who reproduce sophisticated exploration
strategies which are both general and robust (Dorigo
and Gambardella, 1996); but in most cases such
approaches are not able to improve coordination
between agents in dynamic conditions due to the
need to provide adequate knowledge of changes in
environment.
The work reported here re-examines and extends
principles presented in (Ribeiro et al., 2012) and
(Ribeiro et al., 2008), which discussed approaches
for updating policies in dynamic environments and
analysed the effects of strengthening learning-
algorithm parameters in dynamic optimization prob-
lems. To integrate such approaches into updating
strategies, as proposed in this paper, a test frame-
work was developed to iteratively demonstrate the
influence of parameters in the Ant-Q algorithm
(Gambardella and Dorigo, 1995), whilst agents re-
spond to the system using updating strategies, fur-
ther discussed in Section 3.
One important aspect is to investigate whether
policies learned can be used to find a solution rapid-
ly after the environment has been modified. The
strategies proposed in this paper respond to changes
in the environment. We cite as one example of dy-
namic alteration the physical movement of the ver-
tex in a graph (the environment): i.e., the change in
vertex coordinates, in a solution generated with a
Hamiltonian cycle. Such strategies are based on
rewards (pheromones) from past policies that are
used to steer agents towards new solutions. Experi-
ments were used to compare the utilities of policies
generated by agents using strategies proposed. The
experiments were run using benchmark: eil51 e
eil76, found in the online library TSPLIB (Reinelt,
1991).
The paper is organized as follows: Section 2 de-
scribes some approaches related to optimization and
ant-colony algorithms. Section 3 then describes
policy up-dating strategies based on ant-colonies,
and the framework developed for evaluating the
proposed approaches. Experimental results are set
out in Section 4, and the final Section 5 lists conclu-
sions and discusses ideas for future work.
2 OPTIMIZATION
AND ANT-COLONY
ALGORITHMS
Ant colony optimization (ACO) (Dorigo, 1992) is a
successful population-based approach inspired by
the behavior of real ant colonies: in particular, by
their foraging behavior. One of the main ideas un-
derlying this approach is the indirect communication
among the individuals of a colony of agent, called
(artificial) ants, based on an analogy with phero-
mone trails that real ants use for communication
(pheromones are an odorous, chemical substance).
The (artificial) pheromone trails are a kind of dis-
tributed numeric information that is modified by the
ants to reflect their accumulated experience while
solving a particular problem.
Ant-colony algorithms such as Ant System (Dori-
go, 1992), Ant Colony System (Dorigo and Gam-
bardella, 1996) and Ant-Q (Gambardella and Dorigo,
1995)
have been applied with some success to com-
binatorial optimization problems, including the trav-
eling salesman problem, graph coloring and vehicle
routing. Such algorithms are based on the foraging
behavior of ants (“agents”) which follow a decision
pattern based on probability distribution (Dorigo et
al., 1996).
Gambardella and Dorigo (1995) developed the
algorithm Ant-Q, inspired by the earlier algorithm
Q-learning of Watkin and Dayan (1992). In Ant-Q,
the pheromone is denoted by AQ-value (AQ(i,j)).
The aim of Ant-Q is to estimate AQ(i,j) as a way to
find solutions favoring collectivity. Agents select
their actions based on transition rules, as given in
equations 1 and 2:
otherwiseS
qqifjiHEjiAQ
s
tNj
k
0
)(
)],([)],([maxarg
(1)
where the parameters δ and β represent the weight
(influence) of the pheromone AQ(i,j) and of the
heuristic HE(i,j) respectively; q is a value selected at
random with probability distribution [0,..,1]: the
larger the value of q
0
, the smaller is the probability
of the random selection; S is a random variable
drawn from the probability function AQ(i,j); and the
HE(i,j) are heuristic values associated with the link
(i,j) (edge) which helps in the selection of adjacent
ICEIS2013-15thInternationalConferenceonEnterpriseInformationSystems
346

states (vertices). In the case of the traveling sales-
man problem, it is taken as the reciprocal of the
Euclidean distance (Gambardella and Dorigo, 1995).
Three different rules were used to choose the
random variable S: i) pseudo-random, where S is a
state selected at random from the set N
k
(t), following
a uniform distribution; ii) pseudo-random-
proportional, in which S is selected from the distri-
bution given by Equation 2 and; iii) random-
proportional, such that, if q had the value 0 in Equa-
tion 1, then the next state is drawn at random from
the distribution given by Equation 2.
)(
)],([)],([
)],([)],([
tNa
k
aiHEaiAQ
jiHEjiAQ
S
(2)
Gambardella and Dorigo (1995) showed that a good
rule for choosing actions with the Ant-Q algorithm is
based on pseudo-random-proportional. The AQ(i,j)
is then estimated by using the updating rule in Equa-
tion 3, similar to the Q-learning algorithm:
),(max),(
),()1(),(
)(
ajAQjiAQ
jiAQjiAQ
jSa
(3)
where the parameters γ and α are the discount factor
and learning rate respectively.
When the updating rule is local, the updated
AQ(i,j) is applied after the state s has been selected,
setting ΔAQ(i,j) to zero. The effect is that AQ(i,j)
associated with the link (i,j) is reduced by a factor γ
each time that this link appears in the candidate
solution. As in the Q-learning algorithm, therefore,
this approach tends to avoid exploration of states
with lower probability (pheromone concentration),
making the algorithm unsuitable for situations where
the present solution must be altered significantly as a
consequence of unexpected environmental change.
Other methods based on ant-colony behavior
have been proposed for improving the efficiency of
exploration algorithms in dynamic environments.
Guntsch and Middendorf (2003) propounded a
method for improving the solution when there are
changes in environment, using local search proce-
dures to find new solutions. Alternatively, altered
states are eliminated from the solution, connecting
the previous state and the successor to the excluded
state. Thus, new states are brought into the solution.
The new state is inserted at the position where the
cost is least or where the highest cost in the envi-
ronment is reduced, depending on the objective. Sim
and Sun (2002) used multiple ant-colonies, such that
one colony is repelled by the pheromone of the oth-
ers, favoring exploration when the environment is
altered. Other methods for dealing with a dynamic
environment change the updating rule of the phero-
mone to enhance exploration. Li and Gong (2003),
for example, modified local and global updating
rules in the Ant Colony System algorithm. Their
updating rule was altered as shown in Equation 4:
)()()))((1()1( tttpt
ijijijij
(4)
where p
1
(τ
ij
) is a function of τ
ij
at time t, with θ > 0;
for example:
1
()
1
()
1e
iJ
iJ
p
(5)
with θ > 0.
Such methods can be used as alternatives for
finding solutions where the environment is chang-
ing. By using probabilistic transition rules, the ant-
colony algorithm widens the exploration of the state-
space. In this way a random transition decision is
used and some parameters are modified, with new
heuristic information influencing the selection of the
more desirable links.
High pheromone values are reduced by introduc-
ing a dynamic evaporation process. Thus when the
environment is altered and the solution is not opti-
mal, pheromone concentration in the corresponding
links is diminished over time. Global updating pro-
ceeds in the same way, except that only the best and
worst global solutions are considered; i.e.:
(6)
where:
otherwise
solutionglobalworsttheisjiif
solutionglobalbesttheisjiif
ji
0
),(1
),(1
,
(7)
A similar global updating rule was used by Lee et al.
(2011). Other strategies for changing the pheromone
value have been proposed to compensate the occur-
rence of stagnation in ant-colony algorithms. Gam-
bardella et al. (1997) proposed a method for re-
adjusting pheromone values with the values initially
distributed. In another strategy, Stutzle and Hoos
(1997) suggested proportionally increasing the pher-
omone value according to the difference between it
and its maximum value.
Thus, a number of methods based on ant-colony
algorithms have been developed for improving effi-
ciency of algorithm exploration in dynamic envi-
2
( 1) (1 ( ())) () ()
ij ij ij ij ij
tttt
UpdatingStrategiesofPoliciesforCoordinatingAgentSwarminDynamicEnvironments
347

ronments. They can be used as alternatives for im-
proving the solution when the environment is
changed. The proposed approaches are based on
procedures that use strategies to improve exploration
using the probabilistic transition of the Ant Colony
System algorithm to widen exploration of the state
space. Thus, the most random transition decision is
used, varying some parameters where the new heu-
ristic information influences the selection of the
more desirable links.
Some papers apply updating rules to links of a
solution, including an evaporation component simi-
lar to the updating rule of Ant Colony System. Thus
the pheromone concentration diminishes through
time, with the result that less favorable states are less
likely to be explored in future episodes. For this
purpose, one alternative would be to re-initialize the
pheromone value after observing the changes to the
environment, maintaining a reference to the best
solutions found. If the altered region of the environ-
ment is identified, the pheromone of adjacent states
is re-initialized, making them more attractive. If a
state is unsatisfactory, rewards can be made smaller
(generally proportional to the quality of the solu-
tion), thus becoming less attractive over time be-
cause of loss of pheromone by evaporation.
It can be seen that most of the works mentioned
concentrate their efforts on improving transition
rules using sophisticated strategies to obtain conver-
gence. However, experimental results shown that
such methods do not yield satisfactory results in
environments that are highly dynamic and where the
magnitude of the space to be searched is not known.
In Section 3 we present strategies developed for
updating policies generated by rewards (phero-
mones) in dynamic environments.
In these problems, it is only possible to find the
optimum solution if the state space is explored com-
pletely, so that the computational cost increases
exponentially as the state-space increases.
3 STRATEGIES FOR UPDATING
POLICIES GENERATED
BY ALGORITHMS WHICH
SIMULATE ANT-COLONIES
In Ribeiro and Enembreck (2010) it was found that
algorithms based on rewards are efficient when the
learning parameters are satisfactorily estimated and
when modifications to the environment do not occur
which might change the optimal policy. An action
policy is a function mapping states to actions by
estimating a probability that a state e’ can be reached
after taking action a in state e. In dynamic environ-
ments, however, there is no guarantee that the Ant-Q
algorithm will converge to an acceptable policy.
Before setting out the strategies for updating poli-
cies, we give a summary of the field of application,
using a combinatorial optimization problem fre-
quently used in computation to demonstrate prob-
lems that are difficult to solve: namely the Traveling
Salesman Problem (TSP). In general terms, the TSP
is defined as a closed graph A=(E,L) (representing
the agent’s environment) with n states (vertices)
E={e
1
,...,e
n
}, in which L is the set of all linkages
(edges) between pairs of states i and j, where l
ij
= l
ji
under symmetry. The goal is to find the shortest
Hamiltonian cycle which visits every state, returning
to the point of origin (Schrijver 2003). It is typically
assumed that the distance function is a metric (e.g.,
Euclidean distance).
One approach to solving the TSP is to test all
possible permutations, using exhaustive search to
find the shortest Hamiltonian cycle. However given
that the number of permutations is (n – 1)!, this
approach becomes impracticable in the majority of
cases. Unlike such exhaustive methods, heuristic
algorithms such as Ant-Q therefore seek feasible
solutions in less computing time. Even without
guaranteeing the best solution (the optimal policy),
the computational gain is favorable to finding an
acceptable solution.
The convergence of ant-colony algorithms would
occur if there were exhaustive exploration of the
state space, but this would require a very lengthy
learning process before convergence was achieved.
In addition, agents in dynamic environments can
adopt policies which delay the learning process or
which generate sub-optimal policies. Even so, the
acceleration to convergence of swarm-based algo-
rithms can be accelerated by using adaptive policies
which avoid unsatisfactory updating. The following
paragraphs therefore set out strategies for estimating
current policy which improve convergence of agents
under conditions of environmental change.
These strategies change pheromone values so as
to improve coordination between agents and to allow
convergence even when there changes in the Carte-
sian position of environmental states. The objective
of the strategies is to find the optimum equilibrium
of policy reformulation which allows new solutions
to be explored using the information from past poli-
cies. Giving a new equilibrium to the pheromone
value is equivalent to adjusting information in the
ICEIS2013-15thInternationalConferenceonEnterpriseInformationSystems
348

linkages, giving flexibility to the search procedure
which enables it to find a new solution when the
environment changes, thereby modifying the influ-
ence of past policies to construct new solutions.
One updating strategy that has been developed is
inspired by the approaches set out in (Guntsch and
Middendorf, 2001) and (Lee et al., 2001), in which
pheromone values are reset locally when environ-
mental changes have been identified. This is termed
the global mean strategy. It allocates the mean of all
pheromone values of the best policy to all adjacent
linkages in the altered states. The global mean strat-
egy is limited because it fails to take in account the
intensity of environmental change. For example,
good solutions when states are altered can often
make the solution less acceptable since it is only
necessary to update part of action policy. The global
distance strategy updates the pheromone concentra-
tions of states by comparing the Euclidean distances
between all states, before and after the environmen-
tal change. If the cost of the policy increases with
increasing rate of environmental change, the phero-
mone value is decreased proportionately; otherwise
it is increased. The local distance strategy is similar
to the global distance strategy, but updating the
pheromone is proportional to the difference in Eu-
clidean distance of states that were altered.
Before discussing how strategies allocate values
to the current policy in greater detail, we discuss
how environmental changes are occurring. Envi-
ronmental states can be altered by factors such as
scarcity of resources, change in objectives or in the
nature of tasks, such that states can be inserted, ex-
cluded, or simply moved within the environment.
Such characteristics are found in many different
applications such as traffic management, sensor
networks, management of supply chains, and mobile
communication networks.
Figure 1 gives a simplified representation of a
scenario with 9 states in a Cartesian plane. Figurea
shows the scenario before alteration; Figureb shows
the scenario after altering positions of states. The
configuration of the scenario is shown in Table 1.
It can be seen that altering the positions of states
e
4
and e
9
will add six new linkages to the current
policy. The changes to the environment were made
arbitrarily by altering the Cartesian positions of
states whilst restricting them to lie within the field
limit: i.e., adjacent to a Cartesian position. Field
limit is used to restrict changes in addition to adja-
cent states.
(a) Position of states before alteration (A)
(b) Position of states after alteration (A’)
Figure 1: Changing environmental states.
Table 1: Linkages between states before and after altera-
tions.
Before alterations (A) After alterations (A’)
states Linkages states linkages
e
1
(0,5) 1→2, 1→9 e
1
(0,5) 1→2, 1→8
e
2
(2,7) 2→3, 2→1 e
2
(2,7) 2→3, 2→1
e
3
(3,5) 3→2, 3→4 e
3
(3,5) 3→5, 3→2
e
4
(5,5) 4→3, 4→5
e
4
(5,4)
4→6, 4→5
e
5
(6,7) 5→4, 5→6 e
5
(6,7) 5→4, 5→3
e
6
(5,1) 6→5, 6→7 e
6
(5,1) 6→4, 6→7
e
7
(3,0) 7→6, 7→8 e
7
(3,0) 7→9, 7→6
e
8
(2,3) 8→9, 8→7 e
8
(2,3) 8→9, 8→1
e
9
(1,1) 9→1, 9→8
e
9
(2,1)
9→7, 9→8
Thus, introducing environmental change can
modify the position of a state, which can introduce
differences between the current and the optimal
policies giving rise, temporarily, to undesirable
policies and errors. The strategies must update the
pheromone values of linkages between the altered
states, according to the characteristics of each.
A. Mean Global Strategy
The mean global strategy takes no account of the
intensity of environmental change, whilst detecting
that states have been altered. The mean pheromone
value of all linkages to the current best policy Q is
attributed to linkages to the modified states. In con-
trast to other reports where the pheromone was re-
initiated without taking account of the value learned,
UpdatingStrategiesofPoliciesforCoordinatingAgentSwarminDynamicEnvironments
349
the mean global strategy re-uses values from past
policies to estimate updated values. Equation 8
shows how the values are computed for this strategy:
l
Ql
n
lAQ
globalmean
)(
_
(8)
where n
l
is the number of linkages and AQ(l) is the
pheromone value of the l linkages.
B. Global Distance Strategy
The global distance strategy calculates the distance
between all states and the result is compared with
the distance between states in the modified environ-
ment. This strategy therefore takes into account the
total intensity of environmental change. If the dis-
tance between states increases, the updated phero-
mone value is inversely proportional to this distance.
If the cost of the distance between states is reduced,
the pheromone value is increased by the same pro-
portion. Equation 9 is used to estimate the updated
values for linkages between states in the modified
environment A’.
)(
)(
)(
_
11
'
11
ij
n
i
n
ij
ijA
n
i
n
ij
ijA
lAQ
ld
ld
distanceglobal
ee
ee
(9)
where ne is the number of states, A’ is the environ-
ment after change and d is the Euclidean distance
between the states.
C. Local Distance Strategy
The local distance strategy is similar to the global
distance strategy, except that only the pheromone of
linkages to the modified states is updated. Each
linkage is updated in proportion to the distance to
adjacent states that were modified so that updating is
localized in this strategy, thereby improving conver-
gence when there are few changes to the environ-
ment. Equation 10 is used to compute updated val-
ues for the linkages:
)(
)(
)(
_
'
ij
ijA
ijA
lAQ
ld
ld
distancelocal
(10)
The next sub-section gives the framework and the
algorithm for the strategies mentioned above.
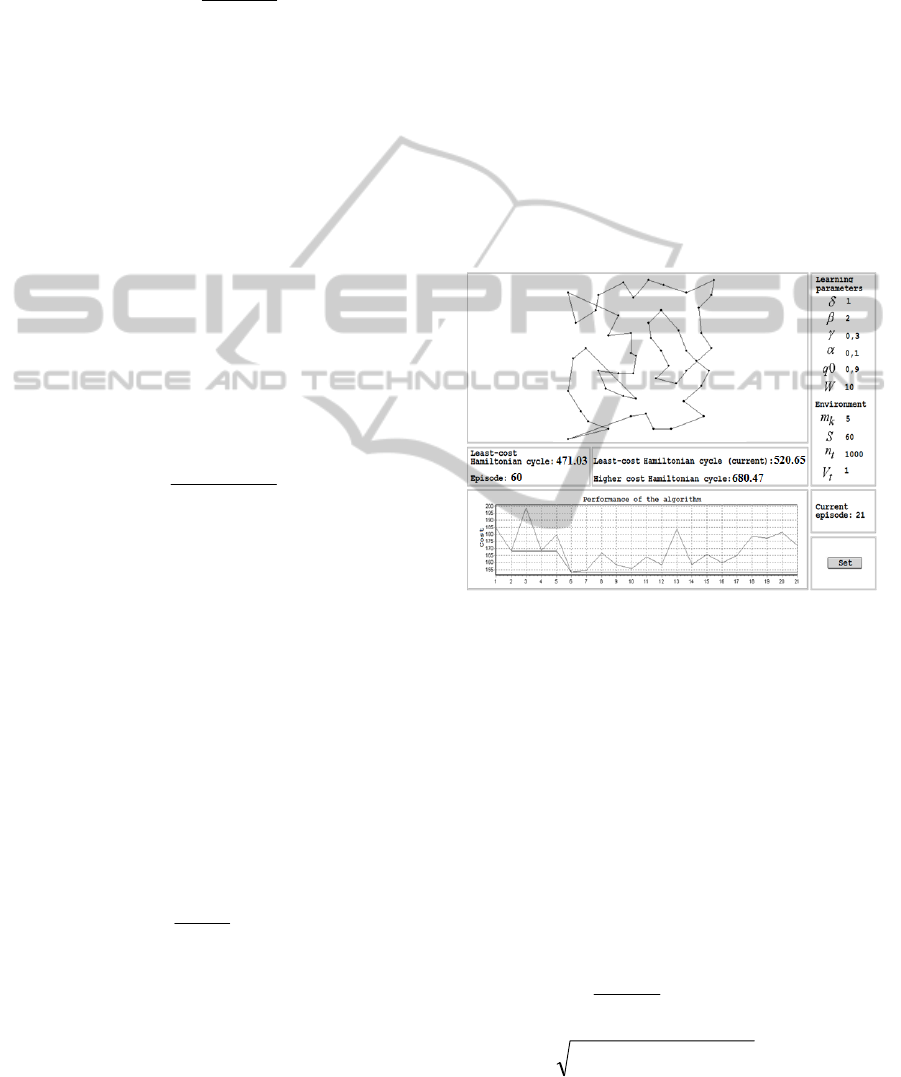
3.1 FANTS - Framework for Ants
FANTS was developed to simulate the Ant-Q algo-
rithm to include the strategies outlined above. Figure
2 gives an overall picture of FANTS and its main
components. The figure shows a graph in which the
thicker, bolder line represents the best policy (i.e.,
shortest Hamiltonian cycle in t
i
) of the episode t
i
as
revealed by the Ant-Q algorithm. The graph imme-
diately below shows the algorithm’s convergence
from one episode to those following it. An episode t
corresponds to a sequence of actions which deter-
mines the states visited by the agents. An episode t
i
ends when agents return to their original state after
visiting all the others. The dimension Y of the graph
is the cost of the policy in each episode (i.e., the cost
of a Hamiltonian cycle). Also the dimension X cor-
responds to the number of episodes. The line in the
graph which varies most gives the least-cost Hamil-
tonian cycle in each episode t.
Figure 2: FANTS.
The columns to the right of Figure 2 show the pa-
rameters used by the algorithm and environment,
where δ and β are the parameters of the transition
rule, and γ and α are the algorithm’s learning param-
eters. The variables m
k
, S and t are the number of
agents, the number of states and the number of epi-
sodes respectively. The parameter t is used as a
stopping criterion for the algorithm. The internal
structures of the framework are expressed by equa-
tions 8-13 which make up the algorithm Ant-Q pre-
sented as Pseudocode 1.
The initial pheromone value is calculated from
Equation 11:
navg
1
(11)
22
)( yyxxij
jijid
(12)
where avg is the average of the Euclidean distances
ICEIS2013-15thInternationalConferenceonEnterpriseInformationSystems
350

between state pairs (i,j) calculated from Equation 12,
and n is the number of agents in the system. Having
calculated the pheromone initial value, this value is
attributed to the linkages which constitute the graph.
This procedure is used only before starting the first
episode, allowing the agents to select states using
both the pheromone values and the heuristic values.
An important aspect of the algorithm in Pseudo-
code 1 is the method for updating the learning table,
which can occur either globally or locally. Global
updating occurs at the end of each episode, when the
least-cost policy is identified and the state values are
updated using the reward parameter.
Algorithm FANT()
Require:
Learning table AQ(i,j);
Environment E;
#Changes, t
w
= 100;
Number of agents m
k
;
Number of states S;
Number of episodes t
n
;
Learning parameters:{α,β,γ,q
0
,δ,W};
Updating strategies = {mean_global,
global_distance,local_distance}
01
Ensure:
02 Randomize the states in E;
03 Use equation 11 to compute the
initial value of the pheromone
and assign it to AQ(i,j);
04
For all episode Do:
05 Set the initial position of
the
agents in the states;
06
While there are states to be
visited Do: // lista tabu <>
07
For all agent Do:
08
if (q(rand(0..1) <= q
0
)
T
hen
09 Choose an action according
to equation 1;
10
Else
11 Choose an action according
to equation 2;
12
end if
13 Update AQ(i,j) using the
rule
in place upgrade Equation
3);
14
end for
15
end while
16
Compute the cost of the best
policy of the episode t
x
;
17
Compute the global update, us-
ing
equations 3 and 13;
18
If #changes are supposed to
occur Then
19
For all linkage (i,j) of al-
tered
states Do:
20
S
witch (strategy):
21
C
ase mean_global strategy:
22
value
=
strategy
A();//
equation
8
23
C
ase global_distance strate-
gy:
24
value
=
strategy
B();//
equation
9
25
C
ase local_distance strategy:
26
value
=
strategy
C();//
equation
10
27
e
nd for
28
e
nd if
29
F
or all linkage (i,j) incident
to the altered state Do:
30
AQ(i,j)
=
value
;
31
e
nd for
32
O
therwise
c
ontinue()
33
e
nd for
34
R
eturn(.,.)
Pseudocode 1: FANTS algorithm with strategies.
Equation 13 is used to calculate the value of
∆AQ(i,j), the reward for global updating.
best
L
W
jiAQ ),(
(13)
where W is a parameterized variable with value 10
and L
best
is the total cost of the shortest Hamiltonian
cycle in the current episode. Local updating occurs
at agent action, the value of ΔAQ(i,j) being zero in
this case.
4 EXPERIMENTAL RESULTS
Experiments are reported here which evaluate the
strategies discussed in Section 3 and the effects of
the learning parameters on Ant-Q performance.
These experiments evaluate algorithm efficiency in
terms of: (i) variations in learning rate; (ii) discount
factor; (iii) exploration rate; (iv) transition rules; (v)
number of agents in the system; and (vi) the pro-
posed updating strategies. Results and discussions
are given in sub-sections 4.1 and 4.2.
The experiments were run using benchmark:
eil51 e eil76, found in the online library TSPLIB
1
(Reinelt, 1991). The datasets eil51 and eil76 have 51
and 76 states respectively and were constructed by
Christofides and Eilon (1969). Such sets have im-
1
www.iwr.uni-heidelberg.de/groups/comopt/software/TSPLIB95/
UpdatingStrategiesofPoliciesforCoordinatingAgentSwarminDynamicEnvironments
351

portant characteristics for simulating problems of
combinatorial optimization, such as, for example,
the number of states and the presence of neighboring
states separated by similar distances. They were also
used by Dorigo (1992), Gambardella and Dorigo
(1995), Bianchi et al. (2002), and Ribeiro and En-
embreck (2010). Figure 3 shows the distribution of
states in a plane, using a 2D Euclidean coordinate
system.
Learning by the algorithm in each set of instanc-
es was repeated 15 times, since it was found that
doing experiments in one environment alone, using
the same inputs, could result in variation between
results computed by the algorithm. This occurs be-
cause agent actions are probabilistic and values
generated during learning are stochastic variables.
The action policy determined by an agent can there-
fore vary from one experiment to another. The effi-
ciency presented in this section is therefore the mean
of all experiments generated in each set of instances.
This number of replications was enough to evaluate
the algorithm’s efficiency, since the quality of poli-
cies did not change significantly (± 2.4%).
The learning parameters were initially given the
following values: δ=1; β=2; γ=0.3; α=0.1; q
0
=0.9
and W=10. The number of agents in the environment
is equal to the number of states. Stopping criteria
were taken as 400 episodes (t=400). It should be
noted that because of the number of states and the
complexity of the problems, the number of episodes
are not enough for the best policy to be determined.
However the purpose of the experiments was to
evaluate the effects of parameters on the algorithm
Ant-Q and on the utility of the final solution from
the strategies given in Section 3.
To evaluate the performance of a technique, a
number of different measures could be used, such as
time of execution, the number of episodes giving the
best policy, or a consideration only of the best poli-
cies identified. To limit the number of experiments,
the utility of policies found after a given number of
episodes was used, taking the minimum-cost policy
at the end of the learning phase.
Preliminary results discussed in subsection 4.1
are for the original version of the Ant-Q algorithm,
whilst experiments with dynamic environments and
updating strategies are given in subsection 4.2.
a. Set of instances (eil51) b. Set of instances (eil76)
Figure 3: State space: Set of instances used in the simula-
tions, with states given as points in a 2D Euclidean coor-
dinate system.
50 episodes
100 episodes
150 episodes 200 episodes
Figure 4: Policy evolution after each 50 episodes.
4.1 Preliminary Discussion
of the Learning Parameters
Initial experiments were generated to evaluate the
impact of the learning parameters and consequently
were adjusted to the proposed strategies. Preliminary
discussions are related in sub subsections A to E.
A. Learning Rate
The learning rate α shows the importance of the
pheromone value when a state has been selected. To
find the best values for α, experiments were con-
ducted in the set of instances for values of α between
0 and 1. Best results were found for α between 0.2
and 0.3. For larger values, agents tend to no longer
make other searches to find lower-cost trajectories
once they have established a good course of action
in a given environmental state. For lower values,
learning is not given the importance that it requires,
so that agents tend to not select different paths from
those in the current policy. The best α-value for
policy was 0.2, and this was used in the other expe
iments. It was also seen that the lower the rate of
ICEIS2013-15thInternationalConferenceonEnterpriseInformationSystems
352

learning, the lower is the variation in policy.
B. discount Factor
The discount factor determines the time weight rela-
tive to the rewards received. The best values for the
discount factor were between 0.2 and 0.3. Smaller
values led to inefficient convergence, having little
relevance to agent learning. Values greater than 0.3
the discount factor receives too much weight, lead-
ing agents to local optima.
C. Exploration Rate
The exploration rate, denoted by the parameter q
0
,
gives the probability that an agent selects a given
state. Experiments showed that the best values lay
between 0.8 and 1. As the parameter value ap-
proaches zero, agent actions become increasingly
random, leading to unsatisfactory solutions.
The best value found for q
0
was 0.9. Agents then
selected leading to lower-cost trajectories and higher
pheromone concentrations. With q
0
= 0.9 the proba-
bility of choosing linkages with lower pheromone
values was 10%.
D. Transition Rule
The factors δ and β measure the importance of the
pheromone and of the heuristic (distance) when
choosing a state. The influence of the heuristic pa-
rameter β is evident. To achieve best results, the
value of β must be at least 60% lower than the value
of δ.
E. Number of Agents
To evaluate the effect of number of agents in the
system, 26 to 101 agents were used. The best poli-
cies were found when the number of states is equal
to the number of agents in the system. When the
number of agents exceeded the number of states,
good solutions were not found resulting in stagna-
tion. Thus, having found a solution, agents tend to
cease to look at other states, having found a local
maximum. When the number of agents is lower than
the number of states, the number of episodes must
increase exponentially in order to achieve better
results.
4.2 Performance of Agents with
Updating Strategies
To evaluate the strategies set out in Section 3, dy-
namic environments were generated in the set of
instances eil76. Agent performance was evaluated in
terms of the percentage change (percent of changes
(10% and 20%) in environment for a window
t
w
=100) generated in the environment after each 100
episodes. This time window (t
w
=100) was used be-
cause past studies have shown that the algorithm
converged well in environments in around 70 states
(Ribeiro and Enembreck 2010).
Change was introduced as follows: at each 100
episodes, the environment produces a set of altera-
tions. The changes were made arbitrarily in a way
that simulated alterations in regions that were par-
tially-known or subject to noise. Thus, environments
with 51 states had 10 states altered when 20%
change occurred. Moreover, alterations were then
simulated for the space with limiting field of depth 1
and 2, so that change in state positions was restrict-
ed, thus simulating the gradual dynamically chang-
ing problems of the real world. Equation 14 is used
to calculate the number of altered states in t
w
=100.
#states
changes #percent
t 100
100
w
(14)
The results of the experiments compare the three
strategies with the policy found using the original
Ant-Q algorithm. The learning parameters used in
simulation were the best of those reported in subsec-
tion 4.1. In most cases, each strategy required a
smaller number of episodes, since the combination
of rewards led to better values by which agents
reached convergence when policies were updated.
Figures 5, 6, 7 and 8 show how the algorithm con-
verged in the set of instances eil51. The X-axis in
these figures shows the t
i
episodes; the Y-axis shows
policy costs (Hamiltonian cycle as a percentage)
obtained in each episode, which 100% refers to the
best policy compute (optimal policy).
Figures 5, 6, 7 and 8 show that the global policy
obtained when the strategies are used is better than
that of the original Ant-Q. The mean global strategy
is seen to be most adequate for environments where
changes are greater (Figures 6 and 8). This is be-
cause this strategy uses all the reward values within
the environment. However, agents reach conver-
gence only slowly when the environment is little
changed, since altered states will have lower rewards
in their linkages than the linkages that define the
current best solution. Nevertheless the global dis-
tance strategy was also more robust in environments
with few changes (Figures 5 and 7). When the envi-
ronment is altered, the strategy seeks to modify
rewards in proportion to the amount of environmen-
tal change. Thus, the effect of updating reduces the
impact resulting from change, causing agents to
converge uniformly. The local distance strategy only
takes account of local changes, so that updating of
policies by means of this strategy works best when
UpdatingStrategiesofPoliciesforCoordinatingAgentSwarminDynamicEnvironments
353

the reward values are larger, as in later episodes.
In general, the strategies succeed in improving
policy using fewer episodes. They update global
policy, and accumulate good reward values, when
the number of episodes is sufficiently large. When
learning begins, policy is less sensitive to the strate-
gies, so that policy performance is improved after
updating. Some strategies can estimate values that
are inappropriate for current policy, mainly after
many episodes and environmental changes result in
local maxima.
Figure 5: Limiting field = 1; Change = 10%.
Figure 6: Limiting field = 1; Change = 20%.
Figure 7: Limiting field = 2; Change = 10%.
Figure 8: Limiting field = 2; Change = 20%.
One point concerns the effect of the limiting field
(adjacent to the Cartesian position) on strategies.
Even with the limiting field restricted, the strategies
improve the algorithm’s convergence. In other ex-
periments where the limiting field was set to 5, the
efficiency of the Ant-Q algorithm is lower (19%)
when compared with the best strategy (Figures 9 and
10).
Figure 9: Limiting field = 5; Change = 10%.
Figure 10: Limiting field = 5; Change = 20%.
The mean global strategy is better when the limiting
field is less than 5 (as in Figures 5 to 8). Since up-
dating uses the mean of all pheromone values, the
value for linkages between altered states is the same.
The global distance and local distance strategies
converge rapidly when the limiting field is 5 (Fig-
ures 9 and 10). This is because updating is propor-
tional to the length of each linkage connected to an
altered state. Thus linkages which are not part of the
best policy have their pheromone values reduced.
We also generate experiments in others environ-
ments of different dimensions, 35, 45 and 55 states.
Note that a number of states S can generate a long
solution space, in which the number of possible
policy is |A||
s
|. The quality of policies in such envi-
ronments did not change significantly (± 1.9%) and
the efficiency of best strategy compared with the
results of the set of instances eil76 is lower (14%).
5 CONCLUSIONS
AND DISCUSSIONS
Methods for coordination based on learning by re-
wards have been the subject of recent research by a
number of researchers, who have reported various
applications using intelligent agents (Ribeiro et al.,
2008), (Tesauro, 1995) and (Watkins and Dayan,
1992). In this scheme, learning occurs by trial and
error when an agent interacts with the surrounding
environment, or with its neighbors. The source of
ICEIS2013-15thInternationalConferenceonEnterpriseInformationSystems
354

learning is the agent’s own experience, which con-
tributes to defining a policy of action which maxim-
izes overall performance.
Adequate coordination between agents that use
learning algorithms depends on the values of fitted
parameters if best solutions are to be found. Swarm-
based optimization techniques therefore use rewards
(pheromone) that influence how agents behave,
generating policies that improve coordination and
the system’s global behavior.
Applying learning agents to the problem of coor-
dinating multi-agent systems is being used more and
more frequently. This is because it is generally nec-
essary for models of coordination to adapt in com-
plex problems, eliminating and/or reducing deficien-
cies in traditional coordinating mechanisms (En-
embreck et al., 2009). For this purpose the paper has
presented FANTS, a solution-generating test frame-
work for analysing performance of agents with the
algorithm Ant-Q and for describing how Ant-Q be-
haves in different scenarios, and with different pa-
rameters and updating strategies of policies in dy-
namic environments. The framework presented is
capable of demonstrating interactively the effects of
varying parameter values and the number of agents,
helping to identify appropriate parameter values for
Ant-Q as well as the strategies that lead to solution.
Results obtained when the updating strategies for
policies in dynamic environments are used show that
performance of the Ant-Q algorithm is superior to its
performance at discovering best global policy in the
absence of such strategies. Although individual
characteristics vary from one strategy to another, the
agents succeed in improving policy through global
and local updating, confirming that the strategies can
be used where environments are changing over time.
Experiments using the proposed strategies show
that, although their computational cost is greater,
their results are satisfactory because better solutions
are found in a smaller number of episodes. However
further experiments are needed to answer questions
that remain open. For example, coordination could
be achieved using only the more significant parame-
ters. A heuristic function could be used to accelerate
Ant-Q, to indicate the choice of action taken and to
limit the space searched within the system. Updating
the policy could be achieved by using other coordi-
nation procedures, avoiding stagnation and local
maxima. Some of these strategies are found in (Ri-
beiro et al., 2008) and (Ribeiro et al., 2012). A fur-
ther question is concerned with evaluating the algo-
rithm under scenarios with more states and other
characteristics. These hypotheses and issues will be
explored in future research.
ACKNOWLEDGEMENTS
We thank anonymous reviewers for their comments.
This research is supported by the Program for Re-
search Support of UTFPR - campus Pato Branco,
DIRPPG (Directorate of Research and Post-
Graduation) and Fundação Araucária (Araucaria
Foundation of Parana State).
REFERENCES
Chaharsooghi, S. K., Heydari, J., Zegordi, S. H., 2008. A
reinforcement learning model for supply chain order-
ing management: An application to the beer game.
Journal Decision Support Systems. Vol. 45 Issue 4,
pp. 949-959.
Dorigo, M., 1992. Optimization, Learning and Natural
Algorithms. PhD thesis, Politecnico di Milano, Itália.
Dorigo, M., Gambardella, L. M., 1996. A Study of Some
Properties of Ant-Q. In Proceedings of PPSN Fourth
International Conference on Parallel Problem solving
From Nature, pp. 656-665.
Dorigo, M., Maniezzo, V., Colorni, A., 1996. Ant System:
Optimization by a Colony of Cooperting Agents. IEEE
Transactions on Systems, Man, and Cybernetics-Part
B, 26(1):29-41.
Enembreck, F., Ávila, B. C., Scalabrin, E. E., Barthes, J.
P., 2009. Distributed Constraint Optimization for
Scheduling in CSCWD. In: Int. Conf. on Computer
Supported Cooperative Work in Design, Santiago, v.
1. pp. 252-257.
Gambardella, L. M., Dorigo, M., 1995. Ant-Q: A Rein-
forcement Learning Approach to the TSP. In proc. of
ML-95, Twelfth Int. Conf. on Machine Learning, p.
252-260.
Gambardella, L. M., Taillard, E. D., Dorigo, M., 1997. Ant
Colonies for the QAP. Technical report, IDSIA, Lu-
gano, Switzerland.
Guntsch, M., Middendorf, M., 2001. Pheromone Modifi-
cation Strategies for Ant Algorithms Applied to Dy-
namic TSP. In Proc. of the Workshop on Applications
of Evolutionary Computing, pp. 213-222.
Guntsch, M., Middendorf, M., 2003. Applying Population
Based ACO to Dynamic Optimization Problems. In
Proc. of Third Int. Workshop ANTS, pp. 111-122.
Kennedy, J., Eberhart, R. C., Shi, Y., 2001. Swarm Intelli-
gence. Morgan Kaufmann/Academic Press.
Lee, S. G., Jung, T. U., Chung, T. C., 2001. Improved Ant
Agents System by the Dynamic Parameter Decision. In
Proc. of the IEEE Int. Conf. on Fuzzy Systems, pp.
666-669.
Li, Y., Gong, S., 2003. Dynamic Ant Colony Optimization
for TSP. International Journal of Advanced Manufac-
turing Technology, 22(7-8):528-533.
Mihaylov, M., Tuyls, K., Nowé, A., 2009. Decentralized
Learning in Wireless Sensor Networks. Proc. of the
Second international conference on Adaptive and
UpdatingStrategiesofPoliciesforCoordinatingAgentSwarminDynamicEnvironments
355

Learning Agents (ALA'09), Hungary, pp. 60-73.
Reinelt, G., 1991. TSPLIB - A traveling salesman problem
library. ORSA Journal on Computing, 3, 376 - 384,
1991.
Ribeiro, R., Enembreck, F., 2012. A Sociologically In-
spired Heuristic for Optimization Algorithms: a case
study on Ant Systems. Expert Systems with Applica-
tions. Expert Systems with Applications, v.40, Issue 5,
pp. 1814-1826.
Ribeiro, R., Favarim F., Barbosa, M. A. C., Borges, A. P,
Dordal, B. O., Koerich, A. L., Enembreck, F., 2012.
Unified algorithm to improve reinforcement learning
in dynamic environments: An Instance-Based Ap-
proach. In 14th International Conference on Enterprise
Information Systems (ICEIS’12), Wroclaw, Poland,
pp. 229-238.
Ribeiro, R., Enembreck, F., 2010. Análise da Teoria das
Redes Sociais em Técnicas de Otimização e Aprendi-
zagem Multiagente Baseadas em Recompensas. Post-
Graduate Program on Informatics (PPGIa), Pontifical
Catholic University of Paraná (PUCPR), Doctoral
Thesis, Curitiba - Pr.
Ribeiro, R., Borges, A. P., Enembreck, F., 2008. Interac-
tion Models for Multiagent Reinforcement Learning.
Int. Conf. on Computational Intelligence for Model-
ling Control and Automation - CIMCA08, Vienna,
Austria, pp. 1-6.
Schrijver, A., 2003. Combinatorial Optimization. volume
2 of Algorithms and Combinatorics. Springer.
Sim, K. M., Sun, W. H., 2002. Multiple Ant-Colony Opti-
mization for Network Routing. In Proc. of the First Int.
Symposium on Cyber Worlds, pp. 277-281.
Stutzle, T., Hoos, H., 1997. MAX-MIN Ant System and
Local Search for The Traveling Salesman Problem. In
Proceedings of the IEEE International Conference on
Evolutionary Computation, pp. 309-314.
Sudholt, D., 2011. Theory of swarm intelligence. Proceed-
ings of the 13th annual conference companion on Ge-
netic and evolutionary computation (GECCO '11).
ACM New York, NY, USA, pp. 1381-1410.
Tesauro, G., 1995. Temporal difference learning and TD-
Gammon. Communications of the ACM, vol. 38 (3),
pp. 58-68.
Watkins, C. J. C. H., Dayan, P., 1992. Q-Learning. Ma-
chine Learning, vol.8(3), pp.279-292.
Wooldridge, M. J., 2002. An Introduction to MultiAgent
Systems. John Wiley and Sons.
ICEIS2013-15thInternationalConferenceonEnterpriseInformationSystems
356
