
Some Aspects of Autonomous Robot Navigation with Unscented
HybridSLAM
Amir Monjazeb
1
, Jurek Z. Sasiadek
1
and Dan Necsulescu
2
1
Department of Mechanical and Aerospace Engineering, Carleton University, 1125 Colonel By Drive, Ottawa, Canada
2
Department of Mechanical Engineering, Ottawa University, 161 Louis Pasteur, CBY A205, Ottawa, Canada
Keywords: Simultaneous Localization And Mapping (SLAM) Problem, EKF, FastSLAM, HybridSLAM, Unscented
HybridSLAM, Cluttered Environment, Double Loop Closing, Absolute Error.
Abstract: This paper addresses the linearization process of an autonomous mobile robot utilizing the second order
Sterling polynomial interpolation specifically used for Unscented HybridSLAM algorithm. It describes the
implementation of the linearization method to estimate the posterior mean and covariance of the system.
The major interest is to apply linearized equations for a simultaneous localization and mapping case in a
non-domestic environment with a random distribution of landmarks. Using computer simulations,
Unscented HybridSLAM and the associated theoretical interpolation is examined for a double-loop scenario
and the efficacy of the Unscented HybridSLAM is validated.
1 INTRODUCTION
The main task of a feature-based SLAM algorithm is
to estimate the path of the robot and map of the
environment as accurate as possible. There are many
methods in which the robot uses different sensors to
measure positions of landmarks as well as pose of
the robot (Williams et al., 2002). Sensor readings are
analyzed in these methods to extract data from the
active or passive features in the environment to
match it with a-priori known information in order to
determine the current position of the robot. Usually,
the task of extracting and matching data with a-
priori information is easy for a domestic
environment in which landmarks are distributed
evenly. If the robot has a notation of evenly
distribution of landmarks, the extracting of such data
would be rather easier. For some SLAM cases in
which the robot is equipped with restricted sensors, a
uniform distribution of landmarks would
considerably reduce the ambiguity of data
association in the environment (Sasiadek et al.,
2008). The advantage in such cases would be the
elimination of data extracted from wrongly observed
landmarks. Since the robot is aware of a uniform set
of landmarks, sensor readings that result more than a
specific threshold would be automatically deleted
from the estimation process as a result of the
Maximum Likelihood Rule (Thrun et al., 2004).
2 STERLING POLYNOMIAL
INTERPOLATION
The formulation of the second order Sterling
Polynomial Interpolation (SPI) is the basis of
derivation of the Divided Deference Filter (DDF)
and the Central Difference Filter (CDF) (Norgard et
al., 2000). To formulate the equations of the system
in a linear form, the second order SPI will be
discussed in this section to indicate how a non-linear
system can be approximated in a linear form. Then,
the mean and covariance of the system in the
posterior state will be discussed. Based on Taylor
series of a non-linear function in [5], a random
variable
x
around a statistical point
x
as its mean,
can be expressed by
hDhDxhxh
xx
2
!2
1
)()(
2
2
2
)(
)(
!2
1)(
)()(
dx
xhd
xx
dx
xdh
xxxh
(1)
The SPI formula (Julier, Uhlmann, 2004) uses a
finite number of functional evaluations to
approximate the above non-linear function with
x
D
~
as the first and
2
~
x
D
as the second order central
divided difference operators acting on h(x),
is the
interval length or central difference step size and
66
Monjazeb A., Z. Sasiadek J. and Necsulescu D..
Some Aspects of Autonomous Robot Navigation with Unscented HybridSLAM.
DOI: 10.5220/0004452700660073
In Proceedings of the 10th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2013), pages 66-73
ISBN: 978-989-8565-71-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

x
is the prior mean of x around which the expansion
is done. The resulting formula can be expressed as
hD
~
!
hD
~
)x(h)x(h
x
x
2
2
1
(2)
2
)x(h)x(h
)xx(D
~
x
(3)
2
22
2
)x(h)x(h)x(h
)xx(D
~
x
(4)
In some cases (Dahlquist and Bjorck, 1974), the SPI
formula can be interpreted as the Taylor series. If
this formula is extended to the multi dimensional
case, the function h(x) may be obtained by first
stochastically decoupling the prior random variable
x by the linear transformation as
xSy
1
x
(5)
)(h)(h)(h
~
xySy
x
(6)
where
x
S
is called Cholesky factor (Smith, Self, and
Cheesman, 1974) of the covariance matrix P
x
of x
such that P
x
=S
x
S
T
x
. It should be noted that Taylor
series expansion of h(.) and
(.)
~
h
is identical if the
expected value of vector x is E[x] and the covariance
of the system is the expected value of P
x
=
E[
)( xx
)( xx
T
], the transformation stochastically
decouples variables in x so that the interval
components of
y becomes mutually uncorrelated.
P
y
= E[
)( yy
)( yy
T
] = I
(7)
Assuming that L is the dimension of x and y
with
i
y
i
)( yy
as the i
th
component of
y
y
(i=
1, … , L),
i
e
is the i
th
unit vector,
i
d
is the partial
first order difference,
2
i
d
is the partial second order
difference, and
i
m
is the mean operator (Monjazeb
et al. , 2012). Therefore,
)(h
~
h
~
~
ii
L
i
i
y
y
yD
dm
1
(8)
222
111
()()()
ijy
LLL
yi y yq jj qq
ijq
hh
D
y
dmdmd
(9)
)(h
~
)(h
~
)(h
~
iii
eyeyy
2
1
d
(10)
2
1
() ( ) ( ) 2()
2
ii
hhh h
yyeyey
2
i
d
(11)
)(h
~
)(h
~
)(h
~
iii
eyeyy
2
1
m
(12)
using equations (5) and (6) and considering that
i
x
s is the i
th
column of the Cholesky factor of
covariance matrix of x we can induce
ixi
hh eySey ()(
~
)s()(
i
xixx
hh xeSyS
(13)
i
x
s
ix
eS
= (
x
S
)
i
=(
x
P
)
i
(14)
Set of vectors defined in equation (13) is equivalent
so that that the UKF generates its set of sigma-points
with only the difference in the value of the
weighting term (Julier and Uhlmann, 2001).
3 POSTERIOR MEAN
AND COVARIANCE
ESTIMATION
The observation function can be expressed through a
non-linear function h(.) and with considering non-
linear transformation of an L dimensional random
variable x with covariance P
x
and mean x as follows
2
1
() () ()
2
kkkk
hhh h hzx y yD D
(15)
xSy
x
(16)
The posterior mean of
y
and its covariance and
cross covariance are defined as
k
z
E[
k
z ]
(17)
k
z
P
E[
)(
kk
zz
)(
kk
zz
T
]
(18)
k
z
k
x
P
E[
)(
kk
xx
)(
kk
zz
T
]
(19)
Assuming that
y
)( yy
is a zero-mean unity
variance random variable which is symmetric
(Norgard et al., 2000) as defined in equation (5), the
mean is approximated as
k
z E[
hhh
k
~
~
2
1
~
~
)(
~
2
DDy
]
(20)
=
)(h
~
k
y
E[
h
~
~
2
2
1
D
]
(21)
=
)(h
~
k
y
E[
)(h
~
)
ki
L
i
y
i
y
2
1
2
2
2
1
d
(22)
=
()
k
h
y
2
1
1
()()2()
2
L
ii
kk k
i
hh h
ye ye y
(23)
SomeAspectsofAutonomousRobotNavigationwithUnscentedHybridSLAM
67

=
2
2
()
k
L
h
y
2
1
1
()()
2
L
ii
kk
i
hh
y
e
y
e
(24)
By rewriting the posterior mean in terms of motion
vector (Brooks and Bailey, 2009) we will have
2
2
()
kk
L
h
zx
2
1
1
(s)(s)
2
ii
L
x
x
kk
i
hh
xy
(25)
Using the identity
k
z = E[
k
z ] = E[
k
z ] + )(h
k
x – )(h
k
x
= E[
k
z ] + )(h
k
x – E[ )(h
k
x ]
= )(h
k
x + E[
k
z – )(h
k
x ]
(26)
k
z
P = E[ )(
kk
zz )(
kk
zz
T
]
= E[
)( )(h
kk
xz )( )(h
kk
xz
T
]
–E[
)( )(h
kk
xz ]E[ )( )(h
kk
xz ]
T
= E[
)( )(h
~
kk
yz )( )(h
~
kk
yz
T
]
– E[
)( )(h
~
kk
yz
] E[
)( )(h
~
kk
yz
]
T
(27)
From equation (15), the second order approximation
of
h
~
~
h
~
~
)(h
~
kk
2
2
1
DDy-z
can be substituted into
equation (27) and therefore,
k
z
P E[(
2
1
2
hhDD
)
×(
2
1
2
hhDD
)
T
]
–E[(
2
1
2
hhDD
)]
×E[(
2
1
2
hhDD
)]
T
(28)
y
)( yy is symmetric, therefore, all
resulting odd-order expected moments have zero
value. Since the number of terms in this calculation
grows rapidly with the dimension of y, the inclusion
of such terms leads the computation highly complex.
As a result all components of the resulting fourth
order term, E[
4
1
(
h
~
~
2
D
) (
h
~
~
2
D
)
T
], that contains
cross differences in the expansion of equation (28)
are discarded. The extra effort worthwhile is not
considered since it is not possible to capture all
fourth order moments (Monjazeb, Sasiadek, and
Necsulescu, 2011). The approximation of the
covariance and cross-covariance matrices are
expressed as below. For the details refer to (Norgard
et al., 2000).
In equation (30) the odd-order moment terms are
all zero since
)(
kk
yy
is symmetric. The optimal
setting of the central difference interval
parameter,
, is dictated by the prior distribution of
xSy
1
x
. For Gaussian priors, the optimal value of
h is thus h =
3
. For more details see (Norgard et
al., 2000).
k
z
P
2
1
4
1
(s)(s)
ii
L
kx kx
i
hh
xx
×[
(s)(s)
ii
kx kx
hh
xx]
T
+
2
4
1
4
1
L
i
[
(s)(s)2()
ii
xx
kk k
hh h
xx x
×
[
(s)(s)2()
ii
kx kx k
hh hxx x
]
T
]
(29)
k
x
k
z
P E[ ()
kk
xx()
kk
zz
T
]
E[(
x
S ()
kk
yy[
2
1
2
hhDD
-E[
2
1
2
hD
] ]
T
] = E[(
x
S ()
kk
yy[ hD
]
T
]
+
1
2
E[(
x
S ()
kk
yy[
2
hD
]
T
]
–
1
2
E[(
x
S ()
kk
yy]× E[
1
2
2
hD
]
2
(30)
= E[(
x
S ()
kk
yy[
hD
]
T
]
(31)
=
1
2
1
[( ) ( )
i
L
x
ki ki
i
hh
sye ye
T
(32)
=
1
2
1
[( ) ( )
ii i
L
xkx kx
i
hh
sxs xs
T
(33)
4 SIMULATIONS AND RESULTS
4.1 Landmark Estimation Threshold
Figure 1-a shows a path in an environment with a
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
68
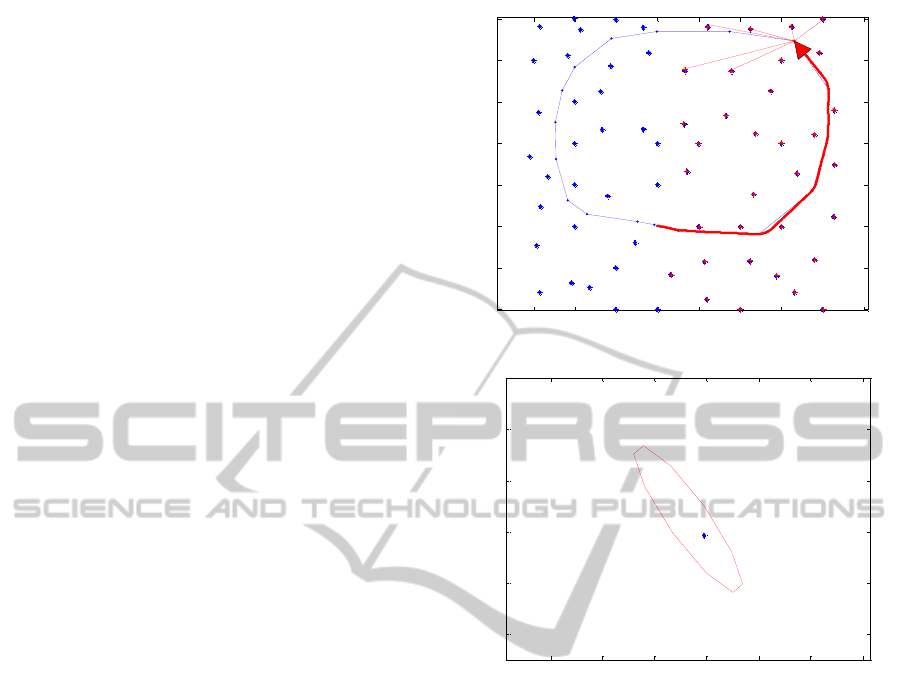
non-uniform distribution of landmarks. Figure 1-b
depicts the range of position estimation of landmark
at x=30m and y=20m. The error in this case
indicates that the estimated location of the landmark
is within ±0.40m. In this particular scenario, the
level of data ambiguity does not arise exponentially
when the distribution of landmarks change from
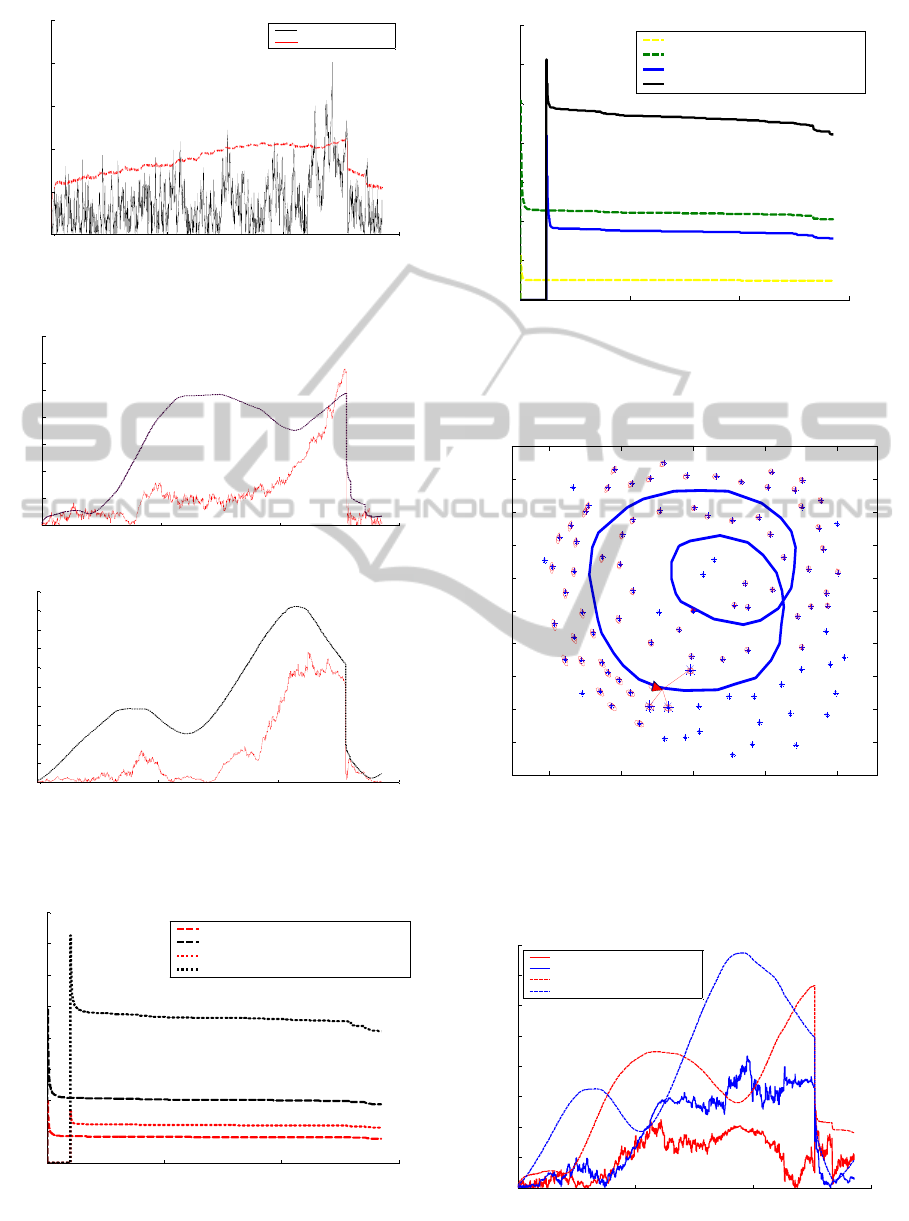
uniform to random. Figure 2 compares the
ambiguity of data with the use of EKF-SLAM as
well as using 3000 particles resulted by FastSLAM,
HybridSLAM, and Unscented HybridSLAM.
Hundreds of dots that make different formations
around in the range are depicted in this figure for
each specific algorithm. The threshold range (oval)
is obtained using a standard EKF under Gaussian
conditions. The true position of the landmark is at
x=30m and y=20m. The banana shape in figure 2-a,
shows the estimation result using the first order
Taylor series in EKF under non-Gaussian conditions
which appears to be highly inaccurate.
The banana shape in figure 2-b, illustrates a
reduction of error in the location estimation of the
landmark using FastSLAM and as a result less
ambiguity in data. However, estimated points do not
fit in the standard oval and there are about 60% of
estimated points off the standard threshold.
HybridSLAM has relatively less ambiguity in data
association as shown in figure 2-c. As shown in the
picture, there are only 30% of points outside the
range. Moreover, the estimation dots are mostly
inside the standard range. Nonetheless, it is still far
from the standard threshold and may not be an
acceptable result for SLAM applications. The
estimation of the landmark with Unscented Kalman
Filter creates an oval shape around the true location
of the landmark and is the one with the least
ambiguity in data association. As demonstrated in
figure 2-d, about 15% of estimated points are outside
the standard range which proves that HS has the
most acceptable result amongst all other algorithms.
As a result, UHS is the only algorithm which is a
recursive filter based on sterling approximation and
has the least tendency to diverge. Figures 3 to 5
demonstrate the performance of Unscented
HybridSLAM for the scenario depicted in figure 1.
In figure 5 the location estimation error of landmark
(x=10, y=0) is approximately 0.2m. In figure 6 the
error of location estimation of landmark (x=30,
y=40) is approximately 0.25m.
4.2 Double Loop Closing Scenario
In this section, simulation results of a double loop
-30 -20 -10 0 10 20 30 40 50
-20
-10
0
10
20
30
40
50
x direction
(
m
)
y direction (m)
Random Distribution of Landmarks
(a)
29.4 29.6 29.8 30 30.2 30.4 30.6
19.6
19.8
20
20.2
20.4
20.6
x direction (m)
y direction (m)
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
(b)
Figure 1: Random Distribution of Landmarks a) non-
uniform distribution of landmarks in the environment. b)
estimated position of the landmark located at (x=30,
y=20).
scenario using Unscented HybridSLAM algorithm
are presented. Here, the double loop closing case is
exemplified in order to analyze the performance of
the algorithm while the robot is travelling across
more complex terrain. Figure 7 shows a map of the
environment that contains an uneven distribution of
landmarks. The figure also shows the true path of
the robot. The speed of the mobile robot is assumed
3.5 m/s. The robot completes the whole loop in
approximately 2800 seconds. Number of particles
used in this experiment is 500. In figure 7 the true
map of the environment and observation results
before closing the loop are depicted. The vehicle
starts at the centre of the test area (x=0, y=0) and
travels counter clock wise. During the navigation
process landmarks are observed and the uncertainty
increases slightly. The uncertainty in the
SomeAspectsofAutonomousRobotNavigationwithUnscentedHybridSLAM
69

observations is at the largest value on the third part
of path. Figure 8 demonstrates the actual error and
standard deviations of the process when the robot is
at the third part of the path. Simulation results
illustrate the actual location error along x and y axes
respectively. Dashed lines represent the 1-sigma
estimated uncertainty. The simulated result indicates
that UHS is a consistent method with the actual
error.
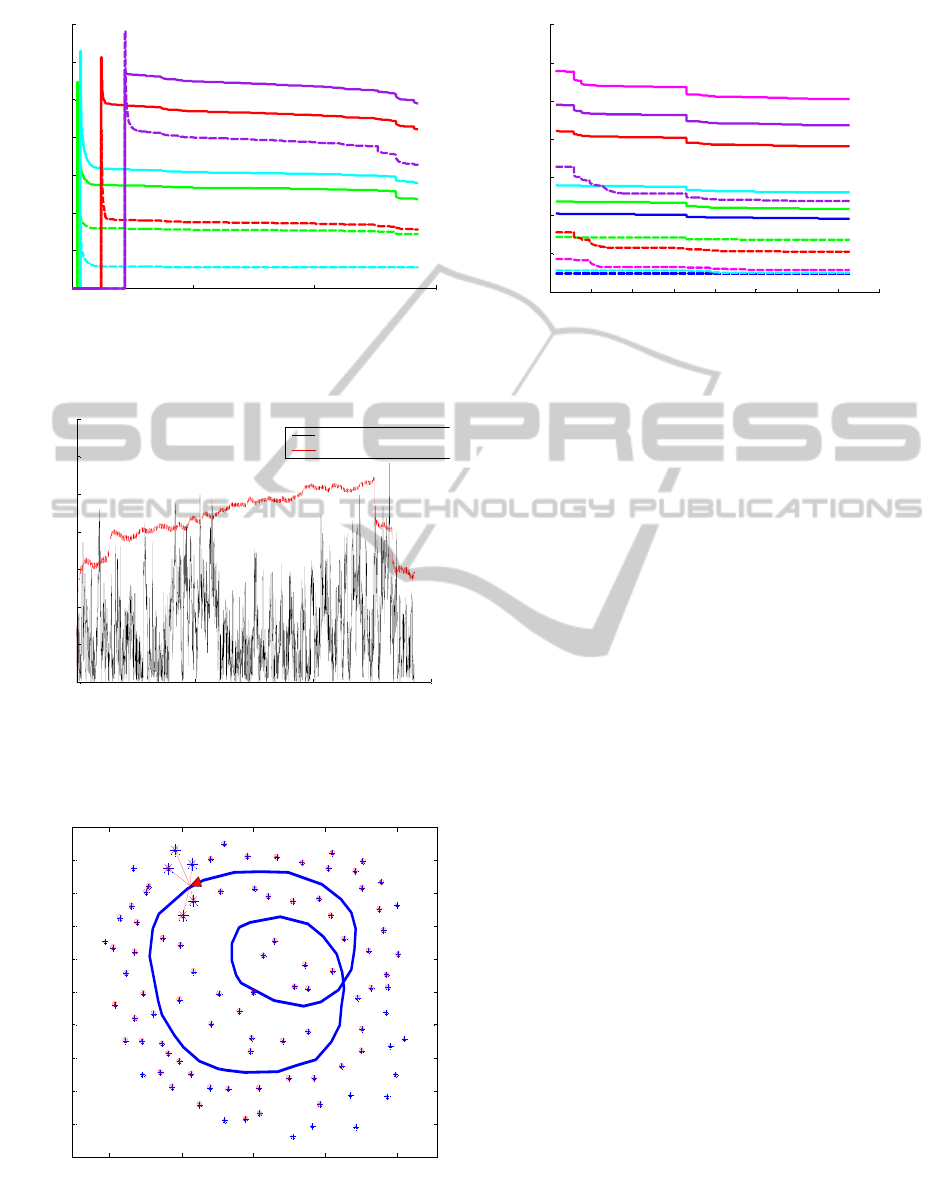
Figure 9 shows the evolution of the uncertainty
for 4 out of 6 landmarks located in the smaller loop
at the beginning of the process. All solid lines
represent the deviations and dashed lines represent
the location estimation error. Comparing the error
between actual landmarks positions and those
estimated with the 2-sigma deviations indicate that
the UHS algorithm is consistent, specifically with
respect to landmarks location error. As expected, the
actual landmarks error and uncertainty have been
reduced. Two out of six landmarks were not
observed due to the scanner range limitations. Figure
10 shows the result in regard to the orientation
deviation and absolute error right after the loop is
closed and indicates that the map becomes more
correlated at the end of the first run. Figure 11
depicts the situation in which the loop is closed and
the robot is at one third of the path again. The robot
is at point (x=-20, y=34) and heading to complete
the second loop. The uncertainty in the observation
of landmarks at this point is considerably reduced,
meaning that the outcome of loop closing is
successful and the filter converges. Moreover, all
observable landmarks have been estimated correctly
following the completion of the first run. Figure 12
demonstrates absolute error and deviations along x
and y axes, the orientation, and for six landmarks
inside the internal loop after the robot completes the
loop and is at one third of its path during completion
of the second loop. The evolution of the uncertainty
for all six landmarks in the map indicate that the
map correlation in maintained and leads the final
map to be consistent. These results show that the
estimated uncertainty is consistent with the actual
error along both axes and the orientation of the
vehicle. The orientation error is around 0.02 radians
which confirms Unscented HybridSLAM algorithm
consistency.
29 29.5 30 30.5 31
19
19.2
19.4
19.6
19.8
20
20.2
20.4
20.6
20.8
21
x direction (m)
y direction (m)
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
. . .
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
. .
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
. .
. . .
.
.
. . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . .
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . .
.
.
.
.
.
.
.
.
. .
. .
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
(a)
29 29.5 30 30.5 31
19
19.2
19.4
19.6
19.8
20
20.2
20.4
20.6
20.8
21
x direction (m)
y direction (m)
.
.
.
.
.
. . . .
.
.
.
. .
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
. .
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
. . .
. . .
.
.
.
.
.
.
.
. .
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . .
.
.
.
. .
.
.
. .
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
. . .
. . .
.
. .
. .
.
.
.
.
.
.
.
.
.
. .
. .
. . . . .
.
. .
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
(b)
29 29.5 30 30.5 31
19
19.2
19.4
19.6
19.8
20
20.2
20.4
20.6
20.8
21
x direction (m)
y direction (m)
.
.
.
.
.
. . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . .
. . .
.
.
.
.
.
.
.
. .
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . .
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
. .
.
. . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
(c)
29 29.5 30 30.5 31
19
19.2
19.4
19.6
19.8
20
20.2
20.4
20.6
20.8
21
x direction (m)
y direction (m)
.
.
. .
.
. . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . .
. . .
.
.
.
.
.
.
.
. .
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . .
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
. .
.
. . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
(d)
Figure 2: Estimated position of the landmarks a) EKF-
SLAM under non-Gaussian conditions b) FastSLAM c)
HybridSLAM d) Unscented HybridSLAM.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
70
0 300 600 900
0
0.05
0.10
0.15
0.20
0.25
Absolute Error and deviation
Time (s)
Orientation (radi ans)
Absolute Error
Deviation
Figure 3: Orientation absolute error and deviation.
0 300 600 900
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Time (s)
x di recti on (m)
Absolute Error and Deviation
(a)
0 300 600 900
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Absolute Error and Deviation
Time (s)
y direction (m)
(b)
Figure 4: Deviation along a) x axis b) y axis.
0 50 100 150
0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
Landmarks Deviation
Time (s)
Error (m)
Landmark (x=10 , y=0) Estimation
Landmark (x=10 , y=0) Deviation
Landmark (x=20 , y=0) Estimation
Landmark (x=20 , y=0) Deviation
Figure 5: Landmarks deviation (x=10 , y=0) and (x=20 ,
y=0) using 3000 particles.
750 800 850 900
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Landmarks Deviation
Time (s)
Error (m)
Landmark (x=30 , y=40) Estimation
Landmark (x=30 , y=40) Deviation
Landmark (x=12 , y=48) Estimation
Landmark (x=12 , y=48) Deviation
Figure 6: landmarks deviation (x=30 , y=40) and (x=12 ,
y=48) using 3000 particles.
-50 -25 0 25 50
-50
-40
-30
-20
-10
0
10
20
30
40
50
y direction (m)
Before closing the loop
x direction (m)
Figure 7: True map of the environment with 94 observable
landmarks.
0 700 1400 2100
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Absolute error and deviations along x and y axes
Time (s)
Erorr (m)
Absolute error in x direction
Absolute error in y direction
Deviation in x direction
Deviation in y direction
Figure 8: Absolute error and deviations.
SomeAspectsofAutonomousRobotNavigationwithUnscentedHybridSLAM
71
0 60 120 180
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Time (s)
Error (m)
Landmarks Deviations and Absolute error
Figure 9: Landmark deviation and absolute error (a double
loop case) using 500 particles.
0 1000 2000 3000
0
0.02
0.04
0.06
0.08
0.10
0.12
0.14
Absolute Error and Deviation
Time (s)
Orientation (radians)
Orientatio n Error
Orientatio n Deviation
Figure 10: Orientation Absolute error and deviation
(double loop case) using 500 particles.
-50 -25 0 25 50
-50
-40
-30
-20
-10
0
10
20
30
40
50
x direction (m)
y direction (m)
After closing the loop
Figure 11: After the completion of the loop.
2800 2801 2802 2803 2804 2805 2806 2807 2808
0
0.05
0.10
0.15
0.20
0.25
0.30
0.40
Landmarks Deviation and Absolute error (at the begining of the second run)
Time (s)
Error (m)
Figure 12: Landmark deviation after closing the loop.
6 CONCLUSIONS
The major shortcoming of most simultaneous
localization and mapping algorithms is their
limitation to the first order accuracy of propagated
the mean and covariance as a result of first order
truncated Taylor series linearization technique.
Unscented HybridSLAM can address this issue with
the use of a deterministic sampling approach to
approximate the optimal gain and prediction terms in
a linear Bayesian form. Unscented HybridSLAM,
with its derivative-free Gaussian random variable
propagation technique, is able to calculate the
posterior mean and covariance of the system to the
second order of Taylor series. In order to show how
the model robot dynamics can be approximated, a
derivative-free technique based on Sterling’s
polynomial interpolation formula was derived and
presented in this paper. Derived equations were
linearized due to the high non-linearity of the
system. The second order Sterling Polynomial
Interpolation was employed to approximate a non-
linear function with first and second order central
divided difference operators acting on the
observation function expressed in a non-linear form.
Simulation results indicated that with the second
order Sterling polynomial linearization, Unscented
HybridSLAM gained enough accuracy and stability
in performance for double-loop scenarios in a non-
domestic environment.
REFERENCES
Williams, S. B., Dissanayake, G., Durrant-Whyte, H.,
2002, An Efficient Approach to the Simultaneous
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
72

Localisation and Mapping Problem”, Proceedings of
the 2002 IEEE International Conference on Robotics
& Automation, Washington DC.
Thrun, S., Montemerlo, M., Koller, D., Wegbreit, B.,
Nieto, J., Nebot, E., 2004, FastSLAM: an efficient
solution to the simultaneous localization and mapping
problem with unknown data association, Journal of
Machine Learning Research.
Norgard M., Poulsen N., Ravn O., 2000, Advances in
derivative-free state estimation for nonlinear systems,
Tech. Rep. IMM-REP, pp. 1998-2015, Dept. of
Modelling, Technical University of Denmark..
Julier, S. J., Uhlmann, J. K., 2004, Unscented filtering and
nonlinear estimation, Proc. of IEEE Journal, Vol. 92,
Issue 3, pp. 401-422, March.
Dahlquist G., Bjorck A. Numerical methods, 1974,
Prentice-Hall, NJ, Englewood Cliffs.
Smith R., Self M., Cheesman P., 1974, Estimating
uncertain spatial relationships in robotics,
Autonomous Robot Vehicles; Coxand & Wilforn Ed.,
Springer Verlag, pp. 167-193.
Monjazeb, A., Sasiadek, J. Z., Necsulescu, D., 2012,
Autonomous navigation of an outdoor mobile robot in
a cluttered environment using a combination of
unscented Kalman filter and a Rao-Blackwellised
particle filter, 2012, Proc. of 9
th
International
Conference on Informatics in Control Automation and
Robotics (ICINCO), pp. 485-488, Rome, Italy, July.
Monjazeb, A., Sasiadek, J. Z., Necsulescu, D., 2012, An
approach to autonomous navigation based on
Unscented HybridSLAM, Proc. of 17
th
International
Conference on Methods and Models in Automation
and Robotics, pp. 369-374, Miedzyzdroje, Poland.
Julier, S. J., Uhlmann, J. K., 2001, A counter example to
the theory of simultaneous localization and map
building, Proc. of IEEE International Conference on
Robotics and Automation, pp. 4238-4243, March.
Brooks, A., Bailey, T., 2009, HybridSLAM: Combining
FastSLAM and EKF-SLAM for reliable mapping,
Springer Tracts in Advanced Robotics, Volume 57, pp.
647-661.
Norgard M., Poulsen N., Ravn O., 2000, New
development in state estimation for nonlinear systems,
Journal of Automatica, pp. 1627-1638, Vol. 36, No.
11, November.
Monjazeb, A., Sasiadek, J. Z., Necsulescu, D.,
Autonomous navigation among large number of
nearby 2011, landmarks using FastSLAM and EKF-
SLAM; a comparative study, Proc. of 16
th
International Conference on Methods and Models in
Automation and Robotics (MMAR), pp. 369-374,
Miedzyzdroje, Poland.
Sasiadek, J. Z., Monjazeb, A., Necsulescu, D., 2008,
Navigation of an autonomous mobile robot using
EKF-SLAM and FastSLAM, Proc. of 16
th
Mediterranean Conference on Control and
Automation, pp. 517-522, Ajaccio, France.
SomeAspectsofAutonomousRobotNavigationwithUnscentedHybridSLAM
73
