
Cooperative Area Extension of PSO
Transfer Learning vs. Uncertainty in a Simulated Swarm Robotics
Adham Atyabi
1
and David M. W. Powers
1,2
1
CSEM Centre for Knowledge & Interaction Technology, Flinders University, Adelaide, South Australia
2
Beijing Municipal Lab for Multimedia & Intelligent Software, Beijing University of Technology, Beijing, China
Keywords:
Swarm Robotics, Particle Swarm Optimization, Cooperative Learning, Transfer Learning, Knowledge
Transfer.
Abstract:
The study investigates the effectiveness of 2 variations of Particle Swarm Optimization (PSO) called Area
Extended PSO (AEPSO) and Cooperative AEPSO (CAEPSO) in simulated robotic environments affected by
a combinatorial noise. Knowledge Transfer, the use of the expertise and knowledge gained from previous
experiments, can improve the robots decision making and reduce the number of wrong decisions in such
uncertain environments. This study investigates the impact of transfer learning on robots’ performance in such
hostile environment. The results highlight the feasibility of CAEPSO to be used as the controller and decision
maker of a swarm of robots in the simulated uncertain environment when gained expertise from past training
is transferred to the robots in the testing phase.
1 INTRODUCTION
Navigation is the art of steering a course through a
medium. Localization matches an actual position in
the real world to a location inside a map. Planning
is finding a short, collision-free path from the starting
position towards the predefined ending location. As
such, navigational techniques are useful and effective
when the map on similar information is reliable. Nev-
ertheless, in most real world application domains, the
environment is dynamic, time-dependent, and uncer-
tain. Such environmental conditions pose challenges
to localization and map reliability. Under such cir-
cumstances, behavior-based approaches are suitable
to address real world applications when engaged with
navigation problems.
The Swarm Intelligence (SI) term, introduced by
Beni, Hackwood, and Wang in 1989, used for sys-
tems in which, unsophisticated agents with collective
behaviors have the capability of emerging to a global
pattern by interacting locally with their environment.
SI systems have the capability to solve the collec-
tive problems without centralized control. Particle
Swarm Optimization (PSO), introduced by Kennedy
and Eberhart in (Kennedy and Eberhart, 1995), has
been inspired from animals’ social behaviors which
are illustrated by their social acts resulting in popula-
tion survival. PSO is a self-adaptive population-based
method in which, behaviors of the swarm are itera-
tively generated from the combination of social and
cognitive behaviors of the swarm. A swarm can be
imagined as consisting of members called particles.
Particles cooperate with each other to achieve desired
behaviors or goals. Particles’ acts are governed based
on simple local rules and interactions with the entire
swarm. As an example, movement of a bird in a flock
is based on adjusting movements with its flock mates
(near by neighbors in the flock) (Sousa et al., 2004).
Birds in a flock stay close to their neighbors and avoid
collisions with each other. They do not take com-
mands from any leader bird (there are no leader birds).
This kind of social behavior (Swarm behavior) helps
birds to achieve tasks such as protection from preda-
tors and searching for food (Grosan et al., 2006).
Although PSO has proved to be efficient in solving
problems in various domains, it comes with consid-
erable shortcomings. The shortcomings include pre-
mature convergence and difficulties with dynamic and
real-world optimization. Enhanced versions of PSO
called Area Extended PSO (AEPSO) and Coopera-
tive AEPSO (CAEPSO) showed potential in dynamic
and uncertain simulated environments (Atyabi et al.,
2010). In the study, two variations of uncertainty
(i.e. random noise and relational noise) are employed
to assess the feasibility of the suggested approaches.
The dynamically changing nature of the simulated en-
177
Atyabi A. and M. W. Powers D..
Cooperative Area Extension of PSO - Transfer Learning vs. Uncertainty in a Simulated Swarm Robotics.
DOI: 10.5220/0004456901770184
In Proceedings of the 10th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2013), pages 177-184
ISBN: 978-989-8565-70-9
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

vironment in (Atyabi et al., 2010) make it more dif-
ficult for the simulated swarm of simple robots to
compensate the noise. CAEPSO tackled this prob-
lem through incorporating previously learned knowl-
edge to its decision making process. This study in-
vestigates the impact of knowledge transfer on the
achieved performances from several experiments.
The outline of the study is as follows: Section 2
introduces the PSO and AEPSO algorithms. The de-
tails about the simulated uncertainty are discussed in
Section 3 and CAEPSO is presented in section 4. The
experimental setup and the achieved results are pre-
sented in Section 5. Section 6 presents the conclusion.
2 PARTICLE SWARM
OPTIMIZATION (PSO)
2.1 Basic PSO
Basic PSO is an evolutionary approach introduced by
Kennedy and Eberhart in 1995 and it is inspired from
animal social behaviors. PSO generates a population
of possible solutions called particles (denoted by X )
and evolve them toward optimum by iteratively read-
justing particles’ velocity (denoted by V). PSO takes
advantage from cooperation among particles resulted
from sharing their best findings with each other for
achieving the optimum. The cooperation among par-
ticles in the swarm is facilitated through the use of
social and cognitive components in the basic PSO ve-
locity equation as shown in equation 1.
V
i, j
(t) = wV
i, j
(t − 1)+C
i, j
+ S
i, j
C
i, j
= c
1
r
1, j
× (p
i, j
(t − 1)− x
i, j
(t − 1))
S
i, j
= c
2
r
2, j
× (g
i, j
(t − 1)− x
i, j
(t − 1))
(1)
In the equation, C and S represent social and cogni-
tive components. In the equation, i and j represent
particle’s index and particle’s dimension in the search
space respectively. t is the iteration number. r
1
and
r
2
are random values between 0 and 1, w is the in-
ertia weight. Linearly Decreasing the inertia weight
(LDIW) formulated in equation 2 is one of the typi-
cal approaches used for adjusting w in basic PSO in
which w
1
and w
2
the initial and final inertia weight,
and maxiter is the maximum number of iterations.
w = (w
1
− w
2
) ×
(maxiter −t)
maxiter
+ w
2
(2)
In equation 1, c
1
and c
2
are the acceleration coeffi-
cients used to control the impact of social and cogni-
tive components on the readjustment of the particles’
velocity. The cognitive component attracts the parti-
cles in the swarm toward their best personal findings
(p). The social component attracts the particles in the
swarm toward the global best findings (g). In PSO,
personal and global best are updated using following
equations:
P
i
(t) =
P
i
(t − 1) i f f (x
i
(t)) ≥ f (P
i
(t − 1))
x
i
(t) otherwise
(3)
g(t) = argmin{ f (P
1
(t)), f (P
2
(t)),..., f (P
s
(t))} (4)
f represent the fitness (evaluator) function. The new
position of each particle can be computed by follow-
ing equation:
x
i, j
(t) = x
i, j
(t − 1)+V
i, j
(t) (5)
A detail discussion about PSO, its advantages and
shortcomings is presented in (Atyabi and Samadzade-
gan, 2011).
2.2 Area Extended PSO
This enhanced version of PSO is introduced aiming
to solve basic PSO problems in robotic domains. The
idea is based on using advanced versions of neighbor-
hood topology and communication methodology with
the aim of improving basic PSO performance in two
dimensional multi-robot learning task in static, dy-
namic and noisy environments. In AEPSO, we solved
fundamental problems
1
of basic PSO by adding some
heuristics to it. Later on, the feasibility of the pro-
posed modifications are examined in a simulated en-
vironment within several survivor rescuing scenarios.
These heuristics are as follows:
a) To Handle Dynamic Velocity Adjustment.
AEPSO takes advantage from a new velocity adjust-
ment heuristic which tackles the premature conver-
gence using equation 6.
−→
V (t +1) = f ittest
c
2
× rand()(g(t) − x(t)) : 1
c
1
× rand()(p(t) −x(t)) : 2
w ×V (t) : 3
1 + 2 HPSO : 4
1 + 3 GPSO : 5
2 + 3 GCPSO : 6
1 + 2 + 3 Basic − PSO : 7
(6)
b) To Handle Direction and Fitness Criteria.
AEPSO takes advantage from two heuristics known
as Credit Assignment and Environment Reduction to
addresses the cul-de-sac problem (Suranga, 2006).
1
Fundamental problems of basic PSO are known as
i)Lack of Dynamic Velocity Adjustment, ii)Premature Con-
vergence, iii) Controlling Parameters and iv)Difficulties in
Dynamic and Time Dependent environments(Peter, 1998;
Mauris, 2002; Jakob and Jacques, 2002)
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
178
Environment Reduction Heuristic. The environ-
ment reduction heuristic is inspired from (Park et al.,
2001; Yang and Gu, 2004) highlighting the advantage
of separating a large learning space to several smaller
spaces aiming to ease the exploration. In this heuris-
tic, the large environment is divided into sub-virtual
fixed areas with various credits. As in our simula-
tions the environment is 500×500 pixels; each area is
defined as a 20×20 pixels with square shapes result-
ing a matrix representation of 25×25 areas (625 ar-
eas overall). Each area contains 400 pixels with each
pixel representing a possible location for obstacles,
survivors, or robots. A credit associated to each area
indicate the proportion of robots, survivors and obsta-
cles positioned in that area. Only the likelihood infor-
mation about the areas is provided to robots. An over-
all elimination time (iterations) for each area is also
included in the areas credit to help robots to prioritize
the observations of areas. This elimination time in-
dicate the time left before all survivors in an area get
eliminated. In here, exploration appears when a robot
leaves its current area for another one and exploitation
appears when a robot searches for survivors inside an
area. Aiming for better balance between the explo-
ration and the exploitation behaviors, robots only ex-
ploit areas that contain survivors (areas with positive
credits). In order to increase robots’ awareness, the
likelihood information (areas’ credits) of their neigh-
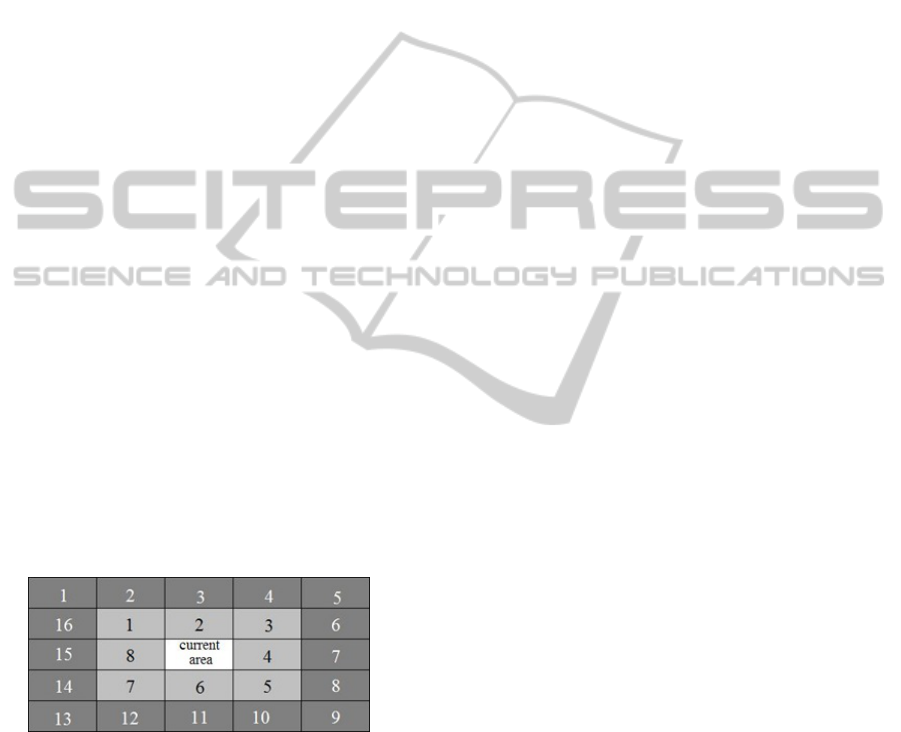
boring areas are provided to them. These neighboring
areas are divided to two layers of near and far neigh-
boring areas as shown in fig. 1. In the simulation,
robots set their direction according to the direction of
the destination area and use maximum velocity when-
ever they want to leave an area for a new one.
Figure 1: The first and the second neighboring areas of the
current area.
Credit Assignment Heuristic. (Jim and Martinoli,
2007) argued that in some cases, as in macroscopic
modeling of PSO, in a robotic problem, mathemati-
cal functions (benchmark functions) might not be ap-
propriate as fitness evaluators since in such modeling,
particles represent actual locations of robots in the en-
vironment. In AEPSO, a Punishment/Reward mech-
anism (inspired from reinforcement learning) is used
instead. In here, robots would be rewarded positive
credit whenever they find a survivor or whenever they
locate themselves inside an area with positive credit.
On other hand, robots would be punished by receiving
negative credits if they do not achieve any reward af-
ter certain iterations or if they collide with obstacles.
c) To Handle Cooperation between Robots.
Communication Heuristic. The heuristic force
robots to only communicate and share knowledge
with those that are in their communication range
which results in dynamic neighborhood topology and
helps to create sub-swarms.
Help Request Heuristic. This heuristic provides co-
operation between different sub-Swarms by allowing
robots to request assistant and seek cooperation from
other robots that are in their communication range
whenever they require it. Robots that receive the re-
quest can either acknowledge the request or pass it
through to others in their communicating range creat-
ing a chain of communication between robots that are
far away from each other.
d) To Handle the Search Diversity.
Boundary Condition Heuristic. The heuristic solves
the lack of diversity in basic PSO by forcing robots
that get too close to the boundary of the environment
to relocate themselves to somewhere in the middle of
the environment by selecting an ad hoc direction and
moving toward that direction for certain number of it-
erations.
AEPSO vs. PSO in a Simulated Survivor Rescuing
Scenario.
In our simulation, we used variations of PSO as deci-
sion makers and movement controllers of autonomous
robots. Fig. 2 (a and b) shows the results of basic-
PSO in terms of trajectory traces in such simulation.
The figs shows two different experiments with differ-
ent initializations based on a survivor rescuing sce-
nario in which team of 5 homogeneous robots are
meant to find 15 survivors before they get eliminated.
The environment is 500 × 500 meter and the simu-
lated robots can detect objects (survivors or static ob-
stacles) within a circle of 5 meter around them.
As the figs show, in basic PSO, the results are
highly dependents to the initial locations of the in-
structor elements of the environment (robots, obsta-
cles, survivals). Furthermore, due to the lack of
balance between exploration and exploitation, robots
were not able to cover a high percentage of the envi-
ronment during their search while AEPSO was able
to overcome the problem. The achieved mapping per-
formance by AEPSO in addition to its ability to over-
come random noise as it is demonstrated in (Atyabi
et al., 2010) encouraged us to further evaluate the al-
gorithm in simulated environments that are affected
by highly complicated and more realistic type of
noise.
CooperativeAreaExtensionofPSO-TransferLearningvs.UncertaintyinaSimulatedSwarmRobotics
179

Figure 2: The trajectory traces of robots controlled by Basic
PSO (two different executions) and AEPSO. different colors
are used to represent different robots’ trajectories. Blue and
yellow dots represent survivors and obstacles respectively.
3 ILLUSION NOISE
The illusion noise presented in (Atyabi et al., 2010) is
a combinatorial type of noise in which the noise value
applied to the credit of each area in the environment
is influenced from the neighboring (first layer of area
neighborhood see fig 1) and far away areas (packs of
neighborhood) and based on the ongoing activities in
the environment the value of the noise in each area
is changed over time (iteratively changing noise). In
a simulated environment of 500 × 500 pixels divided
to 625 different areas of 20 × 20 pixels resulting to
a matrix of 25 × 25 cells, the application of the il-
lusion effect results in a matrix representation of 25
equations needs to be predicted in each iteration in or-
der to reveal true credit of each area for that iteration.
Equation 7 shows the illusion credit of an area (this
equation would be computed for each area in each of
the iterations to provide the noisy credit of that area).
C
i
(t + 1) = C
i
(t) + N(C
i
(t)) + S(C
i
(t))
N(C
i
(t)) =
∑
8
j=1
(a × actual credit(area
i, j
))
S(C
i
(t)) =
∑
8
j=1
(b × neighboring pack
(i, j)
)/8
(7)
C
i
represents the corrupted value of an area af-
fected by illusion noise in iteration (t + 1). a and
b are constant parameters (a = b = 0.125) used
to control the impact of j
th
neighboring area and
neighboring pack of area(i) (C
i
). N(C
i
(t)) and
S(C
i
(t)) represent the effect of other neighboring ar-
eas and neighboring packs on current area (C
i
) re-
spectively. actual credit(area
(i, j)
) area is the un-
corrupted credit of j
th
neighboring area of area
(i)
.
neighboring pack
(i, j)
indicates the impact of neigh-
boring packs of the pack which contains area
(i)
. This
impact is assumed as the average credit of areas who
are the members of that pack.
Fig 3 illustrates an snapshot of the simulated
environment which also demonstrate neighboring
packs of an area.
Figure 3: The environment during the initialization phase.
Survivors, obstacles and agents are shown larger than the
real experiment in which the size is equal to 1 pixel. White
lines are used to virtually divide the environment to areas.
Rectangles with green and red colors represent neighboring
packs and neighboring areas of the current area respectively.
The current area is illustrated with a rectangle filled with
yellow color.
Fig 4 demonstrate the impact of the illusion effect on
two simple pictures aiming to help with the under-
standing of the resulting complexity.
Figure 4: The impact of the illusion effect on a picture with
25 × 25 pixels. The left side picture is the original and the
right side picture is after application of the illusion noise.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
180

4 COOPERATIVE AREA
EXTENSION OF PSO (CAEPSO)
Considering the complication that can be arised as
the result of application of the illusion noise, the best
possible way to solve the resulting huge puzzle is to
identify the areas and neighboring packs that have the
highest influence on others first. Identifying and map-
ping such areas results in eliminating their effects on
other areas (by reducing their credits to zero). The
decisions that robots make about the credit of each
area are based on the elements such as Past knowl-
edge, Current knowledge and perception, and some
additional heuristics (Speculation mechanism).
4.1 CAEPSO’s Additional Heuristics
In CAEPSO, two additional heuristics are suggested
to tackle the complexities raised by the application of
the illusion noise. These heuristics are as follows:
• Leave Force. The heuristic decreases 10% of
an area’s credit in a robot’s mask whenever the
robot enters the area or spent certain number of it-
erations exploiting that area (i.e., the area’s flag
would be changed to self speculation and the
credit would be reduced by 10% off). The heuris-
tic guarantee that robots do not spend a long time
in an area and do not get stuck in areas.
• Speculation Mechanism. The heuristic helps to
provide a high level of noise resistance. Specula-
tion mechanism is based on using a small mem-
ory as a mask of the entire environment (i.e., a
matrix of 25 × 25 cells, each cell representing an
area in the simulated environment). In the start
of a simulation, the value of each cell in the ma-
trix represent the corrupted credit of the associ-
ated area in the environment (corrupted with the
illusion noise) and later, robots update their mask
of the environment based on their own observa-
tions and knowledge gained from other robots
through knowledge sharing and communication.
The value of robots’ masks would be changed by
the following factors:
– robots’ and their neighbors’ self-observations
which reduce the referring cells’ value to zero.
This happens whenever a robot fully map an
area and locate and rescue all survivors within
that area.
– robots’ and neighbors’-speculation which de-
creases the referring cells’ value of their mask
to the measured value.
As robots share their masks with each whenever
they are in each other communication range, they
assess each others expertness to clarify the relia-
bility of the knowledge they are receiving. That is,
less expert robots only share their own or the oth-
ers self-observations (the information that they are
sure of); more expert robots also share their spec-
ulations about the areas’ true credit. The robots
degree of expertness are assessed based on factors
such as the number of cells in their masks marked
as self-observations and proportion of their re-
wards and punishments.
Following steps are taken when robots are within
each other communication range (Knowledge sharing
mechanism):
• Start of knowledge sharing
• Evaluate the expertness level of both robots (a and
b)
– The non-expert robot (a) only shares cells of its
mask that are flagged as self and neighbor ob-
servation.
– The Expert robot (b) shares cells of its
mask that are flagged as self-observation,
self-speculation, neighbor-observation, and
neighbor-speculation.
• End of knowledge sharing
In an environment affected by illusion, each agent
should choose an area for observation (exploitation)
and their decisions can have significant effects on
their own and group’s performance (e.g., if they
choose the best area (the area with the highest effect
on others), they can help to reduce a high percentage
of noise in the other areas and therefore, they can help
to increase the group performance).
Pseudo-code of taken steps when robots are con-
trolled by CAEPSO is presented in algorithm 1.
Algorithm 1: Pseudecode for controlling a
robot with CAEPSO.
Step 1: Begin
Step 2: Initialization the robot is randomly located in the environment.
Step 3: use CAEPSO algorithm to update the robot’s location.
Step 4: Checking the surrounding areas’ credits, if it is changed due to
robot’s action then Speculation Mechanism is used to update the credits
of surrounding areas in robot’s memory.
Step 5: If all survivors are not located yet then go back to step 3.
Step 6: If the maximum number of iterations is not reached yet then go
back to step 3.
Step 7: End
4.2 Past-knowledge
The major differences between AEPSO and CAEPSO
are in the use of past knowledge provided by
AEPSO during the training phase and two additional
CooperativeAreaExtensionofPSO-TransferLearningvs.UncertaintyinaSimulatedSwarmRobotics
181

heuristics (Speculation and Leave-Force heuristics) in
CAEPSO. A detailed discussion and description of
AEPSO and CAEPSO can be found in (Atyabi, 2009;
Atyabi et al., 2010).
Incorporating knowledge gained from multiple
training sessions to increase the overall performance
of swarm of robots proved to be advantageous in (Ma-
jid et al., 2001; Tangamchit et al., 2003). The train-
ing phase in robotic swarm can be designed to be ei-
ther with individual or team of robots. Using a sin-
gle robot for training is problematic given that the
resulting information do not compensate the changes
in the environment caused by other members of the
swarm in the testing phase. On other hand, when a
swarm of robots are used in the training phase, as-
sessing the impact of the made decisions by individ-
uals on the overall achieved performance is challeng-
ing if not impossible. In this study, a swarm of robots
controlled by PSO are used in the training phase with
an environment that is under the influence of illusion
noise. Twenty runs of the experiment with random
initial locations for robots, survivors and obstacles
are executed and the gained knowledge is passed to
the swarm of robots controlled by PSO in the test-
ing phase (different initializations is used in the test-
ing phase)
2
. The most important decision that robots
make in such noisy environment is which area to ex-
ploit first. If areas with highest noise impact on oth-
ers are chosen first, high percentages of the noise
would be reduced from the environment. Considering
the afore mentioned factor the past knowledge gained
from the training phase is designed to reflect the po-
tential of the made decisions in terms of the chosen di-
rections (neighboring areas) with the individuals and
the team of robots. Table 1 represent a template used
for passing the gained overall knowledge from past
training.
Table 1: The mask used to represent robots overall training
phase knowledge (past knowledge).
a / b / c a / b / c a / b / c
1 2 3
a / b / c Current a / b / c
8 Area 4
a / b / c a / b / c a / b / c
7 6 5
In the table, areas are denoted by numbers 1 to 8 with
a, b and c representing the times that the area was
the best area to be chosen, the times that the area was
2
The difference between the initial locations used in the
training and testing phases helps to better reflect real world
situations in which the world is continuously changing.
chosen as a positive credit area (potential direction),
and the times that the chosen area was in fact the best
area to be chosen respectively. Here, past knowledge
refers to the overall knowledge gathered during the
training phases from various trials/executions. In the
testing phase, agents may be experiencing the same
or new random initializations. Such a knowledge help
agents to have overall information about their previ-
ous training and the quality of their previous deci-
sions. The pseudo-code of CAEPSO is presented in
algorithm 2.
Algorithm 2: CAEPSO Pseudecode.
Initialization: Randomly initialize the robots’ locations in the environment.
Robots’ masks’ values= areas’ credits affected by illusion
while (maximum number of iterations is reached or all survivors are found)
do
for (each robot in the swarm) do
if (current area’s credit = 0) then
chose a new area for observation using environment
reduction heuristic, mask, and past knowledge
end
else if (behavior = exploitation & performance is low) then
behavior = exploration using leave force heuristic
end
else if (suspend factor or binary conditions are true) then
use boundary condition, and credit assignment
heuristics
end
else
Update velocity using equation 6 and 2
Update location using equation 5
Evaluate new location using credit assignment
heuristic
Update mask using speculation mechanism
end
end
Updating the personal best using equation 3
Communicate with robots located in the communication range
Updating the global best using equation 4
Update robot’s mask using speculation mechanism
end
5 EXPERIMENTS AND RESULTS
A simulated environment with 500×500 pixels di-
mension, each pixel represent 1m, is used. The en-
vironment is polluted with illusion effect. Robots can
only see within 5 pixels of their surroundings. A team
of 5 robots are used for mapping the environment and
locating the survivors. 15 and 50 static survivors and
obstacles are randomly located in the environment.
The maximum number of iterations is set to 20,000
while the elimination time for each survivor is set as a
random value between 5,000 and 20,000. Robots task
is to locate as many survivors possible before they
get eliminated. The experiments are designed in two
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
182
phase. In the first phase, swarm of 5 robots controlled
with AEPSO are randomly located in the environment
with the task of finding the survivors. The decisions
made by robots during 20 random runs of the exper-
iment are evaluated and aggregated in mask and past
to robots in the second phase (see an example of the
mask in table 1). The experimental design and config-
uration in the second phase is similar to the first phase
with the exception of using the past knowledge and
CAEPSO as the controller of the robots
3
. Four sets
of scenarios are designed in two phases of training
and testing to address homogeneity and heterogene-
ity. The scenarios also investigate the potential of the
transferred knowledge from the training phase when
similar and new initializations are used in the testing
phase. A detailed description of the experiments can
be found in (Atyabi et al., 2010). In here, we are
only interested in the impact of knowledge transfer on
overall achievements across all scenarios discussed in
(Atyabi, 2009; Atyabi et al., 2010).
The results in (Atyabi et al., 2010) showed tran-
scendent improvement in terms of learned knowledge
and robots’ movement between training and testing
phases. CAEPSO rescued 99% and 95% of the sur-
vivors during the testing phase with homogeneous and
heterogeneous scenarios while robots controlled by
AEPSO in the testing phase were only able to rescue
50% and 45% of the survivors. The past-knowledge
provided to robots during the testing phase helped
them to locate survivors in the testing phase regardless
the differences between training and testing initializa-
tion. That suggest that CAEPSO is reliable in envi-
ronments that have no direct past knowledge about it.
The differences between the number of the eliminated
survivors during the training and testing phases indi-
cate CAEPSO’s capability on overcoming the illusion
effect and locating survivors in expected times.
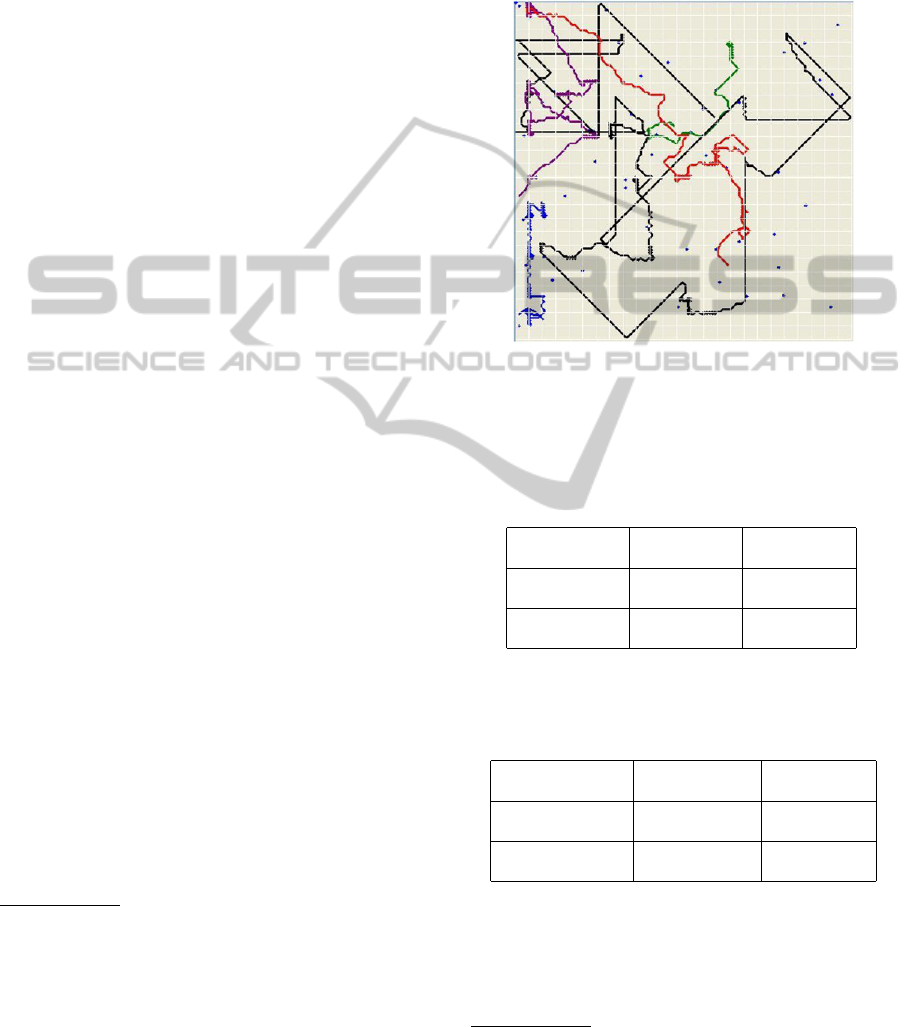
Fig. 5
4
illustrate trajectory traces of 5 robots con-
trolled by AEPSO in the first phase. The comparison
between the results demonstrated in Figs 5 and 2 in-
dicate inability of AEPSO to overcome the illusion
effect evidenced by low portion of mapped environ-
ment. The aggregated results of the made choices by
robots controlled by AEPSO during the first phase de-
picted in table 1 further indicate lost of overall perfor-
3
In all experiments LDIW is used with w
1
= 0.2 and
w
2
= 1 and Fix Acceleration Coefficients of c
1
= 0.5 and
c
2
= 2.5 are employed. Other parameter settings and swarm
configurations are considered and discussed in (Atyabi,
2009) among which the chosen setting showed consistently
better overall performance.
4
The figure is reprinted from Applied Soft Comput-
ing, 10, Atyabi et al., Navigating a robotic swarm in an
uncharted 2D landscape, 49-169, (2010), with permission
from Elsevier
mance due to inaccurate and inefficient choices made
by robots in terms of which neighboring area to ob-
serve and map first. The wrong choices made by
robots result in their inability to remove or reduce the
effect of illusion noise from the environment.
Figure 5: The training phase trajectory traces of a swarm of
robots controlled by AEPSO in an environment corrupted
by illusion. Different colors represent different robots. The
figure is adapted from (Atyabi et al., 2010).
Table 2: Average of the aggregated knowledge from train-
ing phase of several experiments presented in (Atyabi et al.,
2010).
10926 / 1 / 0 3343 / 0 / 0 671 / 1 / 0
1 2 3
19048 / 0 / 0 1195 / 0 / 0
8 4
12265 / 1 / 0 3639 / 0 / 0 1776 / 2 / 0
7 6 5
Table 3: Average of the aggregated knowledge from test-
ing phase of several experiments presented in (Atyabi et al.,
2010).
707 / 349 / 4 705 / 2590 / 51 707 / 438 / 5
1 2 3
51862 / 3996 / 3653 700 / 3931 / 46
8 4
774 / 416 / 5 1862 / 3988 / 126 714 / 394 / 4
7 6 5
Fig. 6
5
illustrate trajectory traces of 5 robots con-
trolled by CAEPSO in phase 2 with and without past
knowledge. Fig 6 (a) represents trajectory traces of
5 robots when no past knowledge is passed to them.
5
The sub figure 6(b) is reprinted from Applied Soft
Computing, 10, Atyabi et al., Navigating a robotic swarm
in an uncharted 2D landscape, 49-169, (2010), with permis-
sion from Elsevier
CooperativeAreaExtensionofPSO-TransferLearningvs.UncertaintyinaSimulatedSwarmRobotics
183

Figure 6: The testing phase trajectory traces of robots con-
trolled by CAEPSO with (a) and without application of past
knowledge. Different colors represent different robots. The
survivor rescuing tasks are time dependent and the environ-
ment is corrupted by illusion.
The figure indicate occasional stagnation and robots
inability to map a high percentage of the environment.
In contrast, as evidenced in sub figure b, when past
knowledge is presented to robots considerable per-
centage of the environment is mapped by each robot.
This is also evident from the difference in the quality
of the made decisions presented in tables 2 and 3. The
combination of the presented results in tables 2 and 3
and fig 6 suggest the importance of knowledge trans-
fer in environments polluted by combination of noises
originating from different sources as in illusion noise.
6 CONCLUSIONS
This study discussed the impact of past knowledge
on decisions made by a group of robots controlled
by two variations of PSO called Area Extended PSO
(AEPSO) and Cooperative AEPSO (CAEPSO). In or-
der to evaluate such an impact a type of noise called
Illusion effect is simulated. The illusion effect repre-
sent an iteratively changing noise that is the outcome
of some combinations of noises originating from dif-
ferent sources located somewhere near or far away.
The results of simulated experiments indicates the im-
portant role of past knowledge in compensating the il-
lusion noise and making correct decisions by the sim-
ulated robots.
REFERENCES
Atyabi, A. (2009). Navigating agents in uncertain environ-
ments using particle swarm optimization. In MSc The-
sis. Multimedia university of Malaysia.
Atyabi, A., Amnuaisuk, S. P., and Ho, C. K. (2010). Navi-
gating a robotic swarm in an uncharted 2d landscape.
In Appl. Soft Comput, pages 149–169. Elsevier.
Atyabi, A. and Samadzadegan, S. (2011). Particle swarm
optimization: A survey. In In Louis P. Walters, ed. Ap-
plications of Swarm Intelligence. Hauppauge, USA:
Nova Publishers, pages 167–178.
Grosan, C., Abraham, A., and Chis, M. (2006). Swarm
intelligence in data mining. In Springer, studies in
computational intelligence (SCI), pages 34:1–20.
Jakob, S. V. and Jacques, R. (2002). Particle swarms ex-
tensions for improved local, multi-modal, and dy-
namic search in numerical optimization. In MS.c The-
sis, Dept. Computer Science, Univ Aarhus, Aarhus C,
DenmarK.
Jim, P. and Martinoli, A. (2007). Inspiring and modeling
multi-robot search with particle swarm optimization.
In Proceeding of the 2007 IEEE Swarm Intelligence
Symposium (SIS2007).
Kennedy, J. and Eberhart, R. (1995). Particle swarm op-
timization. In IEEE Press Proceedings of the 1995
IEEE International Conference on Neural Networks,
pages 1942–1948.
Majid, N. A., Masoud, A., and Eiji, N. (2001). Cooperative
q-learning: the knowledge sharing issue. In Advanced
Robotics, pages 15(8): 815 – 832.
Mauris, C. (2002). The particle swarm - explosion, stability,
and convergence in multidimensional complex space.
In IEEE Transaction on Evolutionary.
Park, K. H., Kim, Y. J., and Kim, J. H. (2001). Modu-
lar q-learning based multi-agent cooperation for robot
soccer. In Robotics and Autonomous Systems, pages
34:109–122.
Peter, J. A. (1998). Evolutionary optimization versus parti-
cle swarm optimization: Philosophy and performance
differences. In Evolutionary Programming VII, Lec-
ture Notes in Computer Science, Springer.
Sousa, T., Neves, A., and Silva, A. (2004). Particle swarm
based data mining algorithms for classification tasks.
In IEEE Parallel and nature-inspired computational
paradigms and applications, pages 30:767–783.
Suranga, H. (2006). Distributed online evolution for swarm
robotics. In Autonomous Agents and Multi Agent Sys-
tems.
Tangamchit, P., Dolan, J. M., and Khosla, P. K. (2003). Cru-
cial factors affecting cooperative multi-robot learning.
In Proceeding of the 2003 IEEE/RSJ Intl conference
on intelligent Robots and Systems, Las Vegas, Nevada,
pages 2:2023–2028.
Yang, E. and Gu, D. (2004). Multi-agent reinforcement
learning for multi-robot systems: A survey. In Techni-
cal report, University of Essex Technical Report CSM-
404, Department of Computer Science.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
184
