
Observer-based Robust Fault Diagnosis
Logic-dinamic Approach
Alexey N. Zhirabok
1
, Alexey Ye Shumsky
1
and Alexey Yu Suvorov
2
1
Department of Control and Automation, Far Eastern Federal University, Vladivostok, Russia
2
Institute of Applied Mathematics, Russian Academy of Sciences, Vladivostok, Russia
Keywords: Mechatronic Systems, Non-smooth Nonlinearities, Diagnosis, Observers, Robust Methods.
Abstract: The problem of robust fault detection and isolation in robotic and mechatronic systems described by
nonlinear models with non-smooth nonlinearities is considered. So-called logic-dynamic approach to
construct the diagnostic observer with non-smooth nonlinearities by linear methods is considered. The
method which allows obtaining full set of solutions with minimal sensitivity to the disturbance is suggested.
This set of solutions can be used to choose the optimal solution with maximal sensitivity to the faults.
1 INTRODUCTION
There are many papers and books devoted to the
problem of robust fault detection and isolation (FDI)
in different technical systems (Blanke et al., 2006);
(Chen and Patton, 1999); (Chen, 2008); (Li and
Zhou, 2009); (Schreier et al., 1997). This problem is
completely solved in the case when a residual
generator is of the form of linear parity relations
(Frank, 1990); (Low et al., 1984); (Patton et al.,
2002); mane papers consider this problem for
diagnostic observer (Blanke et al., 2006); (Chen and
Patton, 1999); (Chen, 2008); (Li and Zhou, 2009);
(Schreier et al., 1997) in the case when the system
under diagnosis is linear or nonlinear with smooth
nonlinearities.
At the same time, many robotic and mechatronic
systems are described by nonlinear models with non-
smooth nonlinearities such as saturation, Coulomb
friction, backlash and hysteresis. For such systems
traditional methods of observer design (see Blanke
et al., 2006; Frank, 1990) are not applicable, and
special design methods must be used. One of these
methods is the logic-dynamic approach suggested by
(Zhirabok and Usoltsev, 2002).
In this paper we consider the problem of robust
observer design for FDI in robotic and mechatronic
systems with non-smooth nonlinearities. As usual,
observer-based methods allow obtaining the single
solution only whose robust properties have to be
checked. If the result of this checking is not good,
another solution is found and the robust properties
are checked again. To overcome this shortcoming,
the new approach is suggested allowing obtaining a
full set of solutions with given robust properties
which can be used to choose the optimal solution.
2 SYSTEM TRANSFORMATIONS
Consider the system describe by the following
equations
)),((=)( ,))(),(()( txhtytutxftx
(1)
where
n
RXtx
)(
,
m
RUtu )(
,
l
RYty )(
are vectors of state, control, and output;
f
and
h
are nonlinear vector functions, the function
f
may
be non-smooth. It is supposed that the function
h
satisfies the condition
l
x
h
rank
for all
n
Rx
except on a set of measure zero.
To obtain a linear function of output, consider
one-to-one transformation of the system (1). For this
system, coordinate transformation
T
1
1
))()(()(
ln
iil
xxxhxhxx
is given by the function
where
ln
ii
xx
,...,
1
are
some state vector components functionally
independent of the components of the function
h
,
i
h
is the i-th component of this function. Because of
this choice, the function
is invertible for all
239
N. Zhirabok A., Ye Shumsky A. and Yu Suvorov A..
Observer-based Robust Fault Diagnosis - Logic-dinamic Approach.
DOI: 10.5220/0004476102390244
In Proceedings of the 10th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2013), pages 239-244
ISBN: 978-989-8565-71-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

n
Rx
except on a set of measure zero. In new
coordinates the system takes the form
)),(),(( )))(),)(((
))(),(()(
1
tutxftutxf
x
tutxf
x
tx
),()))((()(
1
tHxtxhty
(2)
where
)0(
ll
IH
,
ll
I
is the identical
ll
matrix.
To take into account faults and disturbances and
to apply the logic-dynamic approach (Zhirabok and
Usoltsev, 2002), the model (2) has to be transformed
into the following form:
),(=)( ,)()(
))(),((
))(),((
)(+)()(
11
tHxtytLtDd
tutxA
tutxA
CtGutFxtx
pp
where F and G are matrices describing linear
dynamics;
p
AA ,...,
1
are matrices-rows; L and D are
known constant matrices, the term
)(tL
models
unknown parameters and unknown inputs to the
actuator and to the dynamic process, the evaluation
of the vector function
)(t
must generally be
considered unknown; the term
)(tDd
models the
faults: if there are no faults, then
0)( td
, if a fault
occurs,
)(td
becomes an unknown function; C is
p
n
matrix: is the right-hand side of the equation
for the i-th component of the state vector of the
system (2) contains nonlinearity
),( uxA
jj
, then
0),( jiC , otherwise 0),( jiC . Generally, the
function
j
has several terms of the form xA
i
.
3 PRELIMINARY RESULTS
Firstly, consider the linear case when
0C
and the
system is described by the equations
).(=)( ,)()()(+)()( tHxtytLtDdtGutFxtx
Description of the linear observer is found in the
following form:
),(=)(
,)()()(+)()(
***
****
txHty
tKrtJytuGtxFtx
(3)
where K is the feedback gain matrix;
*
F
,
*
G
, J, and
*
H
are matrices describing the observer;
)(
*
tx
is
the state vector of the observer,
)(tr
is a residual
generated as
)()()(
*
tytRytr
for some matrix R.
If there are no faults and
0)(
t
, then
0)( tr
, if a
fault occurs,
0)(
tr
. The problem of the matrix K
choice is considered in (Schreier et al, 1997).
It is supposed that for the healthy system the
vectors
)(
*
tx
and
)(tx
satisfy the equality
)()(
*
txtx
for some matrix
satisfying the
equations (Chen and Patton, 1999; Frank, 1990):
JHFF
*
,
*
HRH
,
GG
*
(4)
To ensure the reliable fault detection, the residual
)(tr
has to be sensitive to the faults and invariant
with respect to the unknown inputs
)(t
, that is
0
L
,
0
D
(Frank, 1990). Notice that in the
case when
0
L
one says about full decoupling
with respect to unknown inputs.
To design an observer in the linear case, there are
a number of approaches, e.g., the eigenstructure
assignment, the approach based on the Kronecker
canonical form (Frank, 1990). Another linear
procedure suggested in (Zhirabok et al., 2010) also
is based on the Kronecker canonical form.
According to this approach, the matrices
*
F
and
*
H
describing the observer are represented in the
canonical form
000
001
000
*
F
,
)100(
*
H
.
In this case (4) may be presented in the form of the
set of k equations:
k
RH
,
HJF
iii
1
,
ki
..., ,2
,
HJF
11
,
(5)
where
i
and
i
J are the i-th rows of the matrices
and
J
, ki ..., ,1
,
k
is the dimension of the
observer. It is shown in (Zhirabok et al., 2010) that
(5) can be transformed into the single equation
HJHFJHFJRHF
k
k
k
k
k
1
2
1
1
. (6)
The solution of this equation gives the minimal
integer
k and the matrices R and J; then the rows of
the matrix
are obtained from (5). This matrix is
used to find the matrix
GG
*
and to check the
conditions
0
L
and
0
D
.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
240

Shortcoming of this approach is that it does not
allow to take immediately into consideration the
condition
0L
, therefore one has to check
whether or not the solution of (6) satisfies this
condition. If not, then another solution must be
found and the condition
0
L
must be checked
again. To overcome this shortcoming, the new
approach is suggested which allows to include the
condition
0L
in (5) and to obtain a full set of
solutions with specified robust properties.
4 PROBLEM SOLUTION
4.1 Main Relationships
Introduce the matrix
*
L
of full rank such that
0
*
LL
. This choice allows rewriting the condition
0L
in the form
*
ML for some matrix M.
Replace in (5) the row
i
of the matrix
with
*
LM
i
that gives the equations
,
*
LMRH
k
,
*1*
HJLMFLM
iii
,,,2 ki
,
1*1
HJFLM
where
i
M
is the i-th row of the matrix M. Rewrite
these equations as follows:
,0))((
TT
*
T
LHMR
k
(7)
,0))()((
TTT
*
T
*1
HLFLJMM
iii
(8)
0))()((
TTT
*
1
1
HFLJM
.
(9)
We begin to solve equations (7)-(9) from the last one
finding at every step all linearly independent
solutions. The result of each step is a conclusion
about possibility to construct the observer satisfying
the condition
0L
; if it is possible, then the
observer is constructed, otherwise the dimension
k is
increased and the next step is fulfilled. Consider
these steps in detail.
4.2 The First Step
Equation (9) has a solution in the case when rows of
the matrices
FL
*
and H are linearly dependent, this
can be checked by the criterion
)()(
*
*
HrankFLrank
H
FL
rank
.
(10)
If (10) is not valid, then full decoupling is
impossible, and one has to use the robust methods
(Frank, 1990); (Low et al., 1986); (Patton, 1994).
Suppose that condition (10) is valid.
Let the matrix
)(
11
PN
contains all linearly
independent solutions of (9), then one can set
111
NWM
for some matrix
1
W
. To check
possibility to construct the observer of dimension
1
k
, consider (7) replacing
1
M
with
11
NW
and
rewriting the result in the form
0)(
*1
1
LN
H
WR
.
(11)
Criterion of existence of this equation solution is the
condition
)()(
*1
*1
LNrankHrank
LN
H
rank
.
(12)
If it is valid, the observer of dimension 1 exists, it
can be constructed as follows. Let the matrix
00
PR
contains all linearly independent
solutions of (11), then the equality
*100
LNPHR
is
valid, and one can set
00
RWR
for some matrix
0
W
. Notice that the matrix
0
R
describes the set of
all linearly independent solutions guarantees full
unknown inputs decoupling for
1k
.
Choosing the certain matrix
0
W
, one obtains
*10000
LNPWHRWRH
. Comparing this
equation with
LMRH
k
for
1k
, one concludes
that
1001
NPWM
. Then relation
HPFLN
1*1
obtained from (9) gives
HPPWFLNPW
100*100
.
This means that
*1001
LNPW
,
1001
PPWJ
; set
GG
1*
, and the observer has been constructed.
4.3 The Second Step
If (12) is not valid, it is necessary to find the
observer of higher dimension. Consider (8) with
2
i
, replace
1
M
with
11
NW
and rewrite the result:
TTT
*
T
*2112
))()(( HLFLJNWM
.
(13)
Since (13) contains additional addend
*11
LNW in
comparison with (9) which by assumption has a
solution, then (13) has a solution as well.
Let the matrix
212
PQN
contains all
linearly independent solutions of (13), then
222
NWM
for some matrix
2
W
. To check
possibility to construct the observer of dimension
2
k
, consider (7) after replacing
2
M
with
22
NW
.
It can be shown that such checking reduces to (11)
Observer-basedRobustFaultDiagnosis-Logic-dinamicApproach
241

and (12) after replacing
1
N
with
2
N
and
1
W
with
2
W
.
It follows from (9) and (13) that all rows of the
matrix
1
N are contained in the matrix
2
N , therefore
one obtains additional possibility to satisfy the
condition (12) and to solve (11) at the second step.
If (12) is valid, denote the solution of (11) by
)(
00
PR
, set
00
RWR
that gives
*200
LNPWRH
and
2002
NPWM
. Then the
relation
HPLNQFLN
2*11*2
obtained as a
solution of (13), implies
FLNPW
*200
HPPWLNQPW
200*1100
, i.e. one can let
*2002
LNPW
,
2002
PPWJ
, and
1
M
1100
NQPW
. Multiplying the equation
FLN
*1
HP
1
by
100
QPW
, one obtains
FLNQPW
*1100
HPQPW
1100
and
*11001
LNQPW
,
11001
PQPWJ
.
Calculating the matrix
GG
2
1
*
, one obtains
the linear observer of dimension 2. Notice that one
can solve (6) with
00
RWR
and obtain rows of the
matrix
from (5).
If (12) is not valid, consider (8) with
3
i
,
replace
2
M
with
22
NW
and continue similar
analysis of (13) after replacing
1
N with
2
N . Such a
procedure continues as long as either the observer is
constructed at some step or the condition
1
ii
NN
is fulfilled for some
i. The latter means that
possibility to solve (11) does not improve, and
absence of a solution at step
1i
implies absence of
that at next steps. In this case, one has to use the
robust methods (Frank, 1990; Low
et al, 1986).
4.4 Nonlinear Case
According to the logic-dynamic approach suggested
in (Zhirabok and Usoltsev, 2002) for nonlinear
systems, the nonlinear observer is based on the
linear one constructing above. The nonlinear term
for the model (3) is obtained as follows. Calculate
the product and combine the similar terms, for
))(),((
))(),((
11
tutxA
tutxA
ФC
pp
(14)
example the sum
kjki
xuAxuA
is rewritten as
kji
xuAA )(
kij
xuA
; notice that this operation
allows to minimize the dimension of the observer.
Then the matrix
A is built up from the matrices-rows
i
A
and
ij
A
contained in the product (14) and the
condition
)()(
TTTTT
AHrankHrank (15)
is checked. If it is valid, the equation
H
AA
*
(16)
is solved and the matrices
idi
AA
*1*
,,
are found,
where
d is the number or the matrix A rows. These
matrices are used to form an argument of the
nonlinear term
),,(
**
uyx
by replacing the term
xA
ij
in (14) with
y
x
A
i
*
*
according to (16). As a
result, the nonlinear observer takes the form
))(),(),(()()()()(
******
tutytxtJytuGtxFtx
If the condition (15) is not valid, one has to construct
another linear observer of bigger dimension or to use
the additional observer considered below.
4.5 Additional Observer Design
If (15) is not valid for all possible linear observers,
the additional observer estimating some rows of the
matrix
A has to be used. Denote by
0
A the row of
the matrix
A for which the condition (15) is not
valid. By analogy with (4), one can write the
equations
000
HA
,
HJFF
0000
,
(17)
where the index “0” corresponds to matrices
describing the additional observer. By analogy with
the matrix
, the matrix
0
has to satisfy the
condition
*00
LM
for some matrix
0
M
.
Replace the matrix
0
in (17) with
*0
LM and
rewrite the equations obtained as follows:
*000
LMHA
,
0))()((
TTT
*
T
*0000
HLFLJMFM .
Denote the solution of these equations by
0
D
and
)(
321
DDD
, respectively. It follows from the
above equations that
000
MHD
,
01
MD
,
002
MFD
, and
02
JD
. The first three
equalities show that rows of the matrices
0
D and
2
D must be linearly depended on rows of the matrix
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
242

1
D
. Therefore, if some row of the matrix
2
D
is
independent of the rows of the matrix
1
D
, then this
row must be removed form the matrix
)(
321
DDD . Such a procedure has to be applied
to every row of the matrix
1
D
.
Denote the result of this analysis as
)(
321
DDD
. Then the procedure similar to the
one suggested above is applied to the matrices
0
D
and
2
D
with removing the appropriate rows of the
matrix
0
D . If the resulting matrix
0
D
is not equal to
zero, the additional observer exists. To construct this
observer, solve the algebraic equation
102
DFD
for
0
F
, set
30
DJ
,
*1
LD
,
GG
0
, and
*00
LDA
. If
0
0
D
, then the additional observer
invariant with respect to the unknown inputs does
not exist and the robust methods must be used.
5 PRACTICAL EXAMPLE
Consider the general electric servoactuator of
manipulation robots studied in (Zhirabok et al.,
2010). The servoactuator dynamic, with the backlash
and elasticity taken into account, may be described
by the following nonlinear equations:
).)(/1(
)),( (
1
,
)),()()(/1(
,
545
13544
43
1322
21
uRxxKLx
xixCMxKxK
J
x
xx
xix iCMxwKWx
xx
ω
rrdMd
M
rrrrr
Bl
Bl
Here
1
x
and
2
x
are the output rotation angle and
velocity at the reducer output shaft, respectively;
3
x
and
4
x
are the output rotation angle and velocity at
the motor output shaft, respectively;
5
x
is the
current through the servoactuator windings;
W and w
are the components of the inertia and velocity,
respectively:
d
M
and
r
M
are the moments of the
Coulomb friction at the motor and reducer shaft
output, respectively:
)(
4o
xsignMM
dd
,
)(
2
xsignMM
ror
;
d
K
and
r
K
are the respective
coefficient of viscous friction of the motor and
reducer output shaft;
r
i
is the reducing ratio of the
reducer;
r
C
is the rigidity coefficient of the
mechanical reducer;
M
J
is the moment of inertia of
the electric servoactuator and of the rotating parts of
the reducer;
K
and
M
K
are the respective
coefficients of the counter EMF and of the torque;
R
and
L are the active and inductive resistances of the
electric servoactuator windings, respectively; the
function
Bl describes the backlash:
))()()(|(|5.0)(
zsignzsignzzBl ,
2
is the backlash span,
13
xixz
r
.
Suppose that
)()(
11
txty
,
)()(
22
txty
,
)()(
43
txty
. According to the logic-dynamic
approach, this system has the following matrix
description:
,
//000
/ /000
01000
0000
00010
LRLK
JKJK
W
wK
F
MMMd
r
,)/10000(
T
LG
.
01000
00010
00001
H
Nonlinear term is described as follows:
,
)(
)(
)(
))(),((
))(),((
3
2
111
xA
xAsign
xAsign
tutxA
tutxA
pp
Bl
),01000( ),00010(
21
AA
)0010(
3 r
iA
,
000
//0
000
/0/
000
MrMdo
rrro
JCJM
W iCWM
C
.
Suppose that
T
)00010(D and
.
01100
00011
T
L
Obviously,
.
10000
01100
00011
*
L
It can be shown that (10) and (12) are valid therefore
one can find from (11)
)011(
0
R
; set
1
0
W . Equation (6) is solvable for
1k
:
2
)1()00010( H
W
wK
W
wK
RHF
rr
.
Observer-basedRobustFaultDiagnosis-Logic-dinamicApproach
243
Since condition (15) is not valid for the matrices
3
A
,
the solution must be improved. An analysis shows
that increase of the observer dimension cannot
overcome this difficulty therefore the additional
observer estimating the variable
xA
3
must be used.
It can be shown that the main and additional
observers are described as follows:
)(00011.200)(1001.11
*221*
zysignyx Bl
,
)(09.902478.05100
*13*2*2*
zuxxx Bl
,
)(180205.45
*313*
zyux Bl
,
1*21
xyyr ,
where
313*2**
1001.1200 yyxxz
. Numerical
values of the electrical servoactuator parameters can
be found in (Zhirabok et al., 2010).
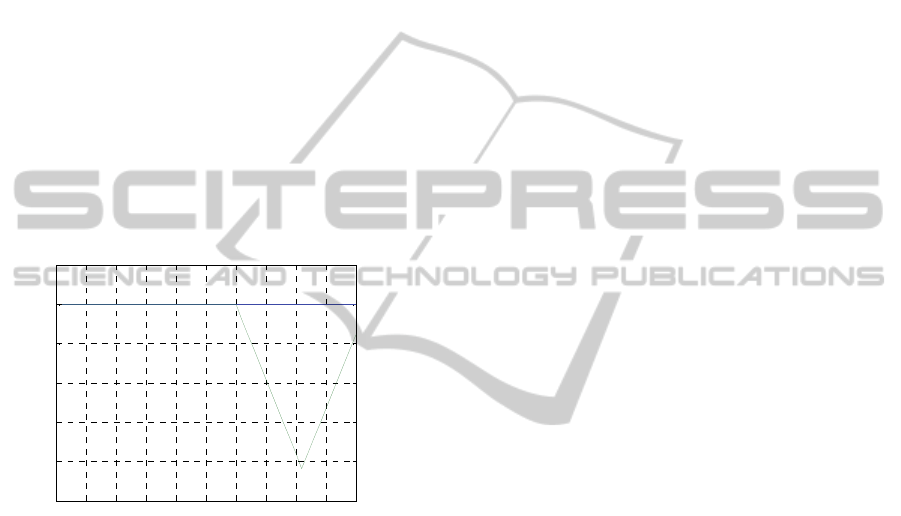
The residual
)(tr time behavior is shown in
Figure 1, the fault occurred at
30t
s; obviously,
the disturbance does not influence on the residual.
0 5 10 15 20 25 30 35 40 45 50
-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
Figure 1: Simulation results.
6 CONCLUSIONS
The problem of robust fault detection and isolation
in mechatronic systems described by nonlinear
models with non-smooth nonlinearities has been
considered. The logic-dynamic approach suggested
in the paper allows solving this problem by linear
methods. The method which allows obtaining a full
set of solutions with full decoupling with respect to
unknown inputs has been suggested.
REFERENCES
Blanke, M., Kinnaert, M., Lunze, J., Staroswiecki, M.,
2006. Diagnosis and Fault-Tolerant Control,
Springer-Verlag, Berlin.
Chen, J., Patton, P., 1999. Robust model-based fault
diagnosis, Kluwer Academic Publishers, Boston.
Chen, J., 2008. Formulation and solving robust fault
diagnosis problem based on
H
setting. Proc. 17th
World Congress IFAC, Korea, Seoul, pp. 7259-7264.
Frank, P. 1990. Fault diagnosis in dynamic systems using
analytical and knowledge-based redundancy. A survey
and some new results, Automatica, vol. 26, pp. 459-
474.
Li, X., Zhou, K. Fault detection for linear discrete-time
invariant systems with decoupling and optimization,
Proc. Joint 48th IEEE Conf. on Decision and Control
and 28th Chinese Control Conf., Shanghai, China, pp.
990-995, 2009.
Lou, X., Willsky, A., Verghese, G. 1986. Optimally robust
redundancy relations for failure detection in uncertain
systems, Automatica, vol. 22, pp. 333-344.
Patton, R. 1994. Robust model-based fault diagnosis: the
state of the art. Proc. IFAC Symp. Safeprocess 1994,
Finland, Espoo, 1994, pp. 1-24.
Patton, R. Frank, P., Clark, R. 2002. Issues of fault
diagnosis for dynamic systems, Spring Verlag, London
Schreier, G., Ragot, J., Patton, R., Frank, P. 1997 Observer
design for a class of nonlinear systems, IFAC Symp.
Safeprocess 1997. Hull, UK, August, pp. 498-503.
Zhirabok, A., Usoltsev, S. 2002. Fault diagnosis for
nonlinear dynamic systems via linear methods, CD
ROM Proc. 15th World Congress IFAC, Spain,
Barcelona.
Zhirabok, A., Kucher, D., Filaretov, V. 2010. Achieving
robustness at diagnosis of nonlinear systems,
Automation and Remote Control, vol. 71, pp. 142-155.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
244
