
Robust Sliding Mode Control for a Roll-to-Roll Machine
Kuo-Ming Chang
1
and Yen-Yeu Lin
2
1
Department of Mechanical Engineering, National Kaohsiung University of Applied Sciences,
415 Chien-Kung Rd., Kaohsiung, Taiwan
2
Institute of Mechanical and Precision Engineering, National Kaohsiung University of Applied Sciences,
415 Chien-Kung Rd., Kaohsiung, Taiwan
Keywords: Roll-to-Roll Machine, Tension Control, Sliding Mode Control, Extended State Observer.
Abstract: This paper proposes a robust sliding mode controller, which is derived based on the extended state observer
and the sliding mode control techniques for a roll-to-roll machine to deal with the system uncertainty
problem of unknown system nonlinear functions, and external disturbances. It is worth noting that the
proposed sliding mode control scheme can be implemented without the condition that the system nonlinear
functions, and the upper bounds of external disturbances must be known in advance and it can achieve the
web transmitting speed and tension control goals satisfactorily, which are validated by numerical simulation
results.
1 INTRODUCTION
Roll-to-roll (R2R) processing is the process of
creating electronic devices on a roll of flexible
plastic or metal foil. R2R processing has the
advantages in fast and mass replication of
microstructures and it is a good fit for fabricating
devices based on flexible substrates. In recent years,
there has been much progress in the R2R processing
(Liang, 2003); (Makela et al., 2007); (Lo et al.,
2009).
To obtain a higher imprinting quality of the
microstructures in the R2R processing, the moving
web (PET substrate) should be under the conditions
that the web should be kept at a steady and fixed
speed and the web tension should be very small. A
moving web under insufficient tension cannot track
properly and may wrinkle the web, while excess
tension may result in web deformation or even a web
break. At the same time, unacceptable levels of
speed variation can cause detrimental variation in
tension. In view of the importance of both speed and
tension controls, a number of control schemes have
been proposed. Chang and Weng applied a
traditional sliding mode control method to control
the web speed and tension. Chen et al., (2004)
proposed a sliding mode control with an estimator
based on a recurrent neural network, which is used
to estimate system uncertainties. Dou and Wang
(2010) presented a robust H
∞
control strategy to
attenuate tension fluctuations when the system is
subject to disturbances and variations in speed or
other operating conditions. In this paper, a robust
sliding mode control is designed based on the
extended state observer and the sliding mode control
techniques for R2R machine to achieve the PET web
transmitting speed and tension control objectives in
the presence of unknown system uncertainties.
2 ROLL-TO-ROLL MACHINE
The configuration of the R2R equipment established
for conducting research into the tension and speed
controls of PET web is shown in Figure 1. Assume
that the web deformation in the thickness and width
directions are small compared to the length direction.
As a pull force is imposed on the web, the linear
density of web,
1
can be expressed by
1
1
L
L
L
(1)
where
L
and
are the length and linear density of
web, respectively before the web is elongated,
L
is the length deformation,
is the web strain in the
length direction.
405
Chang K. and Lin Y..
Robust Sliding Mode Control for a Roll-to-Roll Machine.
DOI: 10.5220/0004476304050409
In Proceedings of the 10th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2013), pages 405-409
ISBN: 978-989-8565-70-9
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
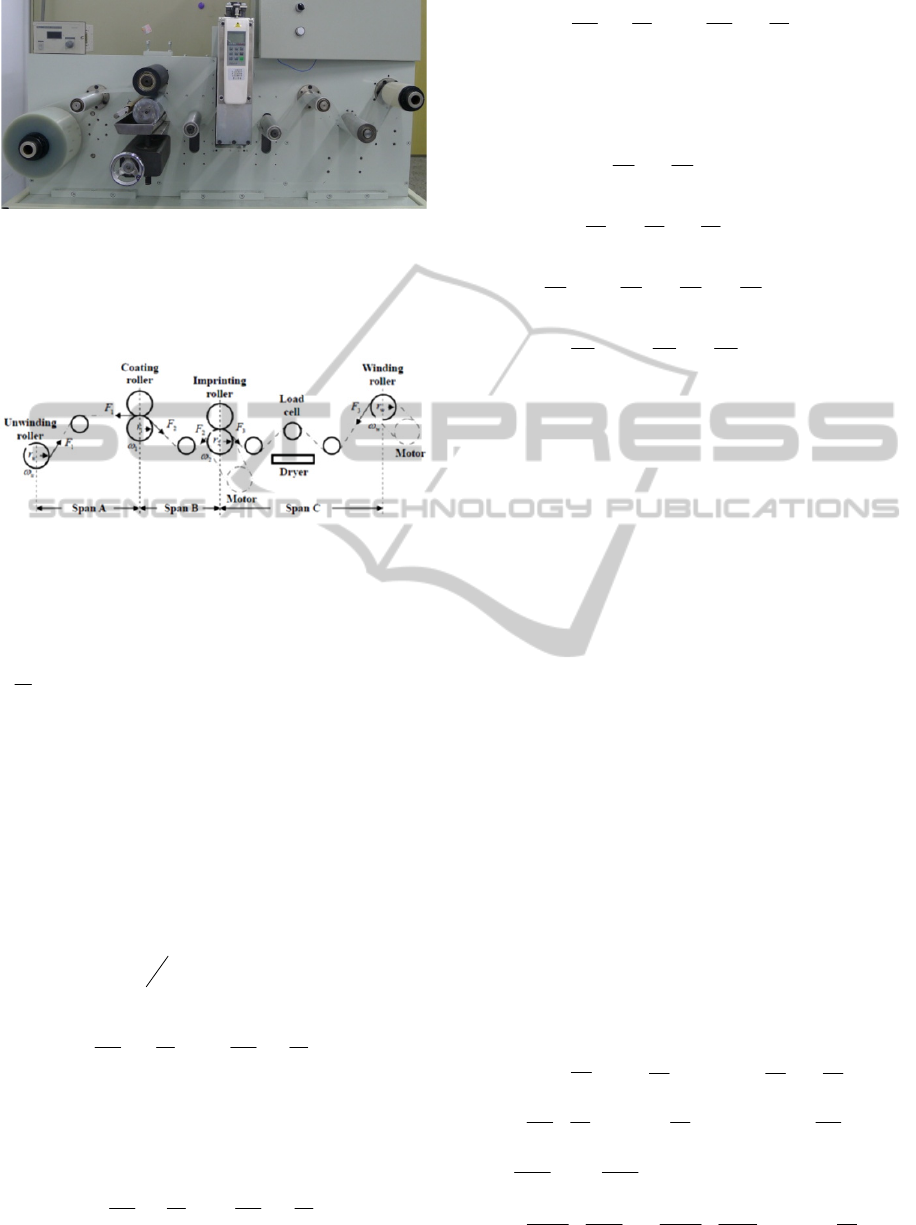
Figure 1: Photograph of the R2R machine.
Assume that the web strain is quite small. It yields
that
)1(
1
(2)
Figure 2: Layout of the R2R machine.
Consider Span A in the R2R system, as shown in
Figure 2. Based on the mass conservation principle,
we have
)()1()()1()1(
110
0
1
1
tvtvdl
dt
d
u
L
(3)
where
)(tv
u
and
)(
1
tv
are the web speeds in the
unwinding roller and the coating roller, respectively,
0
and
1
are the web strains in the unwinding roller
and the coating roller, respectively. From Eq. (3), it
can be obtained that
)()1()()1(
11011
tvtvL
u
(4)
where
1
L
is the web length between the unwinding
roller and the coating roller.
Since
AF
E
/
, the web tension variation can
be derived in the following form from Eq. (4).
11
1
1
1
0
11
1
11
vF
L
v
L
AE
vF
L
v
L
AE
F
uu
(5)
where
A
,
E
, and
F
are the cross sectional area,
Young’s modulus, and the tension of web,
respectively. Similarly to the above derivation, we
have web tension variations in Spans B and C.
22
2
2
2
11
2
1
2
2
11
vF
L
v
L
AE
vF
L
v
L
AE
F
(6)
w3
3
w
3
22
3
2
3
3
11
vF
L
v
L
AE
vF
L
v
L
AE
F
(7)
Assume that there is no slippage between the web
material and rollers. According to Newton’s second
law, the web speed can be derived as
)(
01
2
tT
J
r
F
J
r
v
f
u
u
u
u
u
(8)
)(
1
1
1
1
1
2
1
2
1
2
1
1
tT
J
r
F
J
r
F
J
r
v
f
(9)
)(
2
2
2
2
2
2
2
3
2
2
2
11
2
2
2
tT
J
r
F
J
r
F
J
r
iK
J
r
v
ft
(10)
)(
33
2
22
tT
J
r
F
J
r
iK
J
r
v
f
w
w
w
w
t
w
w
w
(11)
where
J
,
,
r
, and
f
T
represent the inertia, the
angular displacement, the roller radius, and the
friction torque, respectively,
m
T
,
t
K
, and
i
are the
torque, the torque constant, and the current input of
motor, respectively.
Hence, the system dynamics of the R2R machine
are represented by Eqs. (5)-(11). In this paper, a
robust control system is designed for keeping a
steady fixed web speed
2
v
and web tension
3
F
by
controlling motor current inputs
1
i
and
2
i
under the
unknown system uncertainties.
3 SLIDING MODE CONTROL
Define some system states as
21
vx
,
32
Fx
, and
33
Fx
and control input as
11
iu
and
22
iu
. Eqs.
(7) and (10) can be written in the following state-
space representation form:
)(
11112121
tdubxax
(12)
)(
22221212
tdxaxax
(13)
2321313332321313
ububxaxaxax
)(
3
2
232
2
131
tdxcxc
(14)
where
2
2
2
12
J
r
a
,
1
2
2
11 t
K
J
r
b
,
)()(
2
2
2
2
2
2
2
1
tT
J
r
F
J
r
td
f
,
2
33
21
1
F
LL
AE
a
,
3
3
22
1
F
L
a
, and
w
v
L
AE
td
3
2
)(
,
1
23
11
23
31
1
v
LL
AE
vF
LL
a
,
3
33
2
2
23
2
2
23
2
2
32 f
w
w
w
w
T
JL
r
JL
AEr
F
JL
r
JL
AEr
a
,
w
3
33
1
v
L
a
,
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
406

1
23
2
12
23
2
31 tt
K
JL
AEr
KF
JL
r
b
,
23
3
2
3
32 t
w
w
t
w
w
KF
JL
r
K
JL
AEr
b
,
2
2323
31
1
F
LLLL
AE
c
,
w
w
JL
r
c
3
2
32
,
3
3
22
23
2
2
2
23
2
2
2
23
2
2
23
2
2
3
)(
f
w
w
ff
T
JL
AEr
TF
JL
r
F
JL
r
T
JL
AEr
F
JL
AEr
td
.
The system uncertainties arise from unknown
nonlinear system functions, system parameter
variations, and external disturbances. To obtain a
better control performance in this work, the designed
controller should be with the available unknown
system nonlinear functions and external disturbances
for compensating system uncertainties. In this paper,
the extended state observer is applied to estimate
system uncertainties. Then, a sliding mode control is
derived by using the estimated states from the
extended state observer. State equation in (12) is
firstly extended to be
)(
)()(
11
1111121211
tx
ttdubxaxx
e
e
(15)
where
e
x
1
is an extended system state.
Then, according to the work (Han, 1995), an
extended state observer is given in the following
form:
)
ˆ
(
)
ˆ
(
ˆˆ
11121
111111
xxkx
xxkxx
e
e
(16)
Subtracting Eq. (15) from Eq. (16), it yields that the
state error dynamic equation is given by
)(
11121
11111
txkx
xkxx
e
e
(17)
where
111
ˆ
xxx
and
eee
xxx
111
ˆ
are two state
errors. Eq. (17) is further represented in the vector-
matrix form by
)(
)(
0
0
1
111
11
1
12
11
1
1
tXA
tx
x
k
k
x
x
ee
(18)
where
0
1
12
11
1
k
k
A
, two designed parameters
11
k
and
12
k
in matrix
1
A
should be chosen such that the
matrix
1
A
is a Hurwitz matrix and then the extended
state observer can asymptotically estimate system
states. For designing a sliding mode control, a
sliding surface is set as
dteces
1111
(19)
where
111
xxe
d
,
d
x
1
is a desired reference
signal. It follows that the equivalent control by
setting
0
1
s
is obtained as
)]()(-[
1
11112121
11
1
xxctdxax
b
u
ddeq
(20)
From Eq. (15), we have
e
xubxatd
11112121
)(
(21)
Since
e
x
1
is unknown and can not be measured, it
can be replaced by the estimated state
e
x
1
ˆ
. Since the
control input
1
u
is not an available signal, which is
obtained from the proposed control law, the value of
1
u
in Eq. (21) is replaced by a filter signal
1
ˆ
u
given
from the following equation
11111
ˆˆ
uuu
(22)
where
1
is a sufficiently large positive constant and
the filter can let
1
ˆ
u
have the property,
11
ˆ
limlim
1
uu
t
Therefore, the equivalent control (20) is rewritten as
)](
ˆˆ
[
1
11111111
11
1
xxcxubx
b
u
dedeq
(23)
In addition to the equivalent control input, a
traditional nonlinear switching control input is given
as
111
sin su
s
To reduce the chattering in the control input signal,
in this paper, the nonlinear switching control input is
given by
1
1
1111
s
satsu
s
(24)
where
1
is a sufficiently small positive constant,
1
and
1
are two designed positive constants.
Hence, in this paper, the control input is finally
designed as
seq
uuu
111
1
1
11111111111
11
)](
ˆˆ
[
1
s
satsxxcxubx
b
ded
(25)
Similarly to the above derivation of control input
1
u
,
state equations Eqs. (13) and (14) are extended as:
)(
)()(),(
23
23232133
32
tx
ttdubuxfxx
xx
e
e
(26)
where
2
232
2
1311313332321311
),( xcxcubxaxaxauxf
is an unknown system nonlinear function. It yields
RobustSlidingModeControlforaRoll-to-RollMachine
407

that from Eq. (26) the extended state observer is
designed as
)
ˆ
(
ˆ
)
ˆ
(
ˆˆ
)
ˆ
(
ˆˆ
22233
222233
222132
xxkx
xxkxx
xxkxx
e
e
(27)
where positive parameters
12
k
,
22
k
, and
23
k
are
chosen to satisfy the matrix
00
10
01
23
22
21
2
k
k
k
A
is a
Hurwitz matrix. The switching surface is set as
dteceecs
2
2
23222
2
(28)
where
222
xxe
d
,
d
x
2
is a desired reference
signal. Then, it yields that the designed control input
is given by
seq
uuu
222
)](
ˆˆ
)(2[
1
22
2
232323322
32
xxcxubxxxc
b
dedd
2
2
222
s
sats
(29)
22222
ˆˆ
uuu
(30)
where
1
is a sufficiently small positive constant,
1
and
1
are two designed positive constants,
2
is a
sufficiently large positive constant.
4 SIMULATION RESULTS
In order to show the performance of the proposed
control scheme for the R2R machine, some
numerical simulation results are given and analyzed.
Consider a R2R machine with system parameters as
shown in Table 1.
For simulations, the desired speed and tension
are set as
)m/s(009.0
1
d
x
and
)N(5
2
d
x
, control
parameters are designed by
100
11
k
,
200
12
k
,
500
12
k
,
600
22
k
,
500
23
k
,
25
1
,
0.1
1
,
0.0013
1
,
0.08
1
,
200
1
c
,
27
2
,
0.1
2
,
0.068
2
,
0.031
2
,
5
2
c
. Figure
3 (1) and (2) show that the web speed and the web
tension can achieve the control objective. Figure 3 (3)
and (4) show the control input time responses. From
simulation results, it is validated that the proposed
control scheme can effectively compensate system
uncertainties with unknown
)(
1
td
,
)(
2
td
,
)(
1
t
, and
)(
2
t
to achieve web speed and tension control
Table 1: PET material and system parameters.
Notation Data
E
29
N/m10150.3
A
25
m10384.3
1
L
m4787.0
2
L
m3501.0
3
L
m6263.0
3
kg/m1390
h
μm188
w
m180.0
0u
r
m015.0
1
r
m0425.0
2
r
m0425.0
0w
r
m015.0
0u
J
24
mkg10805.7
1
J
23
mkg1019.2
2
J
23
mkg1019.2
0w
J
24
mkg10805.7
Time (sec)
(1) Time response of the web speed
)(
1
tx
(m/s).
Time (sec)
(2) Time response of the web tension
)(
2
tx
(N).
Time (sec)
(3) Time response of the control input
)(
1
tu
.
Time (sec)
(4) Time response of the control input
)(
2
tu
.
Figure 3: The performance of the sliding mode control.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0
0.01
0.02
0.03
0.04
x1(m /s)
x1
x1d
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0
2
4
6
()
x2
x2d
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-0.8
-0.6
-0.4
-0.2
0
0.2
0 0.5 1 1.5 2 2.5 3 3. 5 4 4.5 5
-0.5
0
0.5
1
1.5
2
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
408

objectives satisfactorily.
In Table 1,
h
and
w
represent the PET web
thickness and width, respectively.
5 CONCLUSIONS
In this paper, a robust sliding mode control is
developed based on extended state observer and
sliding mode control techniques for a R2R machine
to control PET web speed and tension. From
simulation results, it is shown that the proposed
control scheme can be implemented without the
knowledge of system uncertainties and can achieve
the control objective satisfactorily under the
unknown system uncertainties. In the future work,
the proposed control scheme will be used in the roll-
to-roll experimental facility to evaluate and validate
its control performance.
ACKNOWLEDGEMENTS
The authors would like to acknowledge the support
from National Science Council, Taiwan, Republic of
China for this work, under Grant NSC 101-2221-E-
151-006.
REFERENCES
Chang K. M., Weng C. P., 2001. Modeling and Control
for a Coating Machine. JSME Int. J. Series C. Vol. 44,
pp. 656-661.
Chen, C. L., Chang, K. M., Chang, C. M., 2004. Modeling
and control of a web-fed machine. Applied
mathematical Modeling, Vol. 28, pp. 863-876.
Dou, X., Wang, W., 2010. Robust control of multistage
printing systems. Control Eng. Practice, Vol. 18, pp.
219-229.
Han, J., 1995. Extended State Observer for A Class of
Uncertain Plants. Control Decis., Vol. 10, No. 1, pp.
85-88.
Liang, R. C., 2003. Electronic Paper by Roll-to-Roll
Manufacturing Processes. 3th International Display
Manufacturing Conference, pp. 621-628.
Lo, C. Y., Keinänen, J. H., Heikki, O. H., Petaja, J., Hast,
J., Maaninen, A., Kopola, H., Fujita, H., Toshiyoshi,
H., 2009. Novel Roll-to-Roll Lift-Off Patterned
Active-Matrix Display on Flexible Polymer Substrate.
Microelectronic Engineering, Vol. 86, Issues.4-6, pp.
979-983.
Makela, T., Haatainen, T., Majander, P., Ahopelto, J.,
2007. Continuous Roll-to-Roll Nanoimprinting of
Inherently Conducting Polyaniline . Microelectronic
Engineering, Vol. 84, Issues 5-8, pp. 877-879.
RobustSlidingModeControlforaRoll-to-RollMachine
409
