
Deep Level Situation Understanding and its Application to Casual
Communication between Robots and Humans
Yongkang Tang
1
, Fangyan Dong
1
, Mina Yuhki
1
, Yoichi Yamazaki
2
,
Takanori Shibata
3
and Kaoru Hirota
1
1
Dept. of Computational Intelligence and Systems Science, Interdisciplinary Graduate School of Science and Engineering,
Tokyo Institute of Technology, G3-49, 4259 Nagatsuta, Midori-ku, Yokohama 226-8502, Japan
2
Dept. of Electrical, Electronic & Information Engineering, Faculty of Engineering, Kanto Gauin University,
1-50-1 Mutsuura-higashi, Kanazawa-ku, Yokohama 236-8501, Japan
3
Human Technology Research Institute, National Institute of Advanced Industrial Science and Technology (AIST),
Central 6, 1-1-1Higashi, Tsukuba 305-8566, Japan
Keywords: Human Robot Interaction, Agent, Emotion Understanding, PARO.
Abstract: The concept of Deep Level Situation Understanding is proposed to realize human-like natural
communication among agents (e.g., humans and robots/machines), where it consists of surface level
understanding (such as gesture/posture recognition, facial expression recognition, and speech/voice
recognition), emotion understanding, intention understanding, and atmosphere understanding by applying
customised knowledge of each agent and by taking considerations to careful attentions. It aims to not
impose burden on humans in human-machine communication, to realize harmonious communication by
excluding unnecessary troubles or misunderstandings among agents, and finally to create a peaceful, happy,
and prosperous humans-robots society. A scenario is established to demonstrate several communication
activities between a businessman and a secretary-robot/a human-boss/a waitress-robot/a human-partner/a
therapy-robot (PARO) in one day.
1 INTRODUCTION
Robots are increasingly capable of co-existing with
humans in environment, such as in manufacturing,
offices, restaurants, hospitals, elder care facilities,
and homes. The ability of comprehending human
activities, e.g., gesture/posture, speech, and emotion,
is required for robots in casual communication, i.e.,
human to human like communication. Verbal and
non-verbal communications are the two basic ways
casual communications transmit among various
agents such as humans and robots/machines. Several
Spoken Dialog Systems are proposed for verbal
communication (Sasajima et al., 1999) (Jung et al.,
2009). As for nonverbal approaches, gesture
recognition has become an attractive research theme
in the field of Human-Robot Interaction (Shan et al.
2007), sign language recognition (Vinciarelli et al.,
2008. Most works on gesture recognition for Human
Robot Interaction (HRI) have been done based on
visual information. To improve the robustness of
gesture recognition system, a Choquet integral based
multimodal gesture recognition system (Tang et al.,
2011) is proposed.
In casual communication among humans, a
human may hide their real emotions, intentions, and
opinions. But other humans may be able to
understand them to some extent by understanding
the spoken contents, voice tones, and facial
expression changes. These kinds of audible
information (e.g., speech and voice) and visible
information (e.g., gesture, posture, and facial
expression) are called surface level communication
in this paper, while deep level situation
understanding is characterized by unifying the
surface level understanding, emotion understanding,
intention understanding, and atmosphere
understanding by applying careful attention to both
universal and agent dependent customized
knowledge. The deep level situation understanding
framework consists of a gesture/posture recognition
module, speech/voice recognition module, emotion
recognition module, intention understanding
module, atmosphere understanding module, and
292
Tang Y., Dong F., Yuhki M., Yamazaki Y., Shibata T. and Hirota K..
Deep Level Situation Understanding and its Application to Casual Communication between Robots and Humans.
DOI: 10.5220/0004480402920299
In Proceedings of the 10th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2013), pages 292-299
ISBN: 978-989-8565-71-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

knowledge base (including universal knowledge and
customized agent-dependent knowledge). A
situation inference network is employed for inferring
appropriate responses (e.g., speech, gesture, and
facial expression).
The deep level situation understanding in casual
communication among various agents, e.g., humans
and robots/machines, aims at three issues. Firstly,
humans must pay special attention to robots in the
ordinary human-machine communication systems,
but such burden may be reduced if robots have deep
level situation understanding abilities. Secondly, in
the real world, unnecessary troubles or
misunderstandings in human to human
communications may sometimes happen but the
deep level situation understanding can make it
possible to avoid such lower level troubles. The
customized agent-dependent knowledge will help to
comprehend and avoid miscommunication. Thirdly,
with the consideration of surface level information,
emotions, intentions, atmospheres, universal
knowledge, and customized agent-dependent
knowledge, it will also help to understand the
background, habits, and intention of the agent for
smoothing natural Human Robot Interaction, so as to
create a peaceful, happy, and prosperous society
which is consisted of humans and various
specification robots/machines.
To illustrate such a peaceful, happy, and
prosperous humans-robots society, a short story is
demonstrated by four humans, two eye robots, and a
therapy-robot PARO.
Surface level understanding is summarized in 2.
In 3, concept of deep level situation understanding is
proposed. A scenario is demonstrated to illustrate
the proposed deep level understanding in 4.
2 SURFACE LEVEL, EMOTION
INTENTION,
AND ATMOSPHERE
UNDERSTANDING
FOR HUMANS-ROBOTS
INTERACTION
2.1 Surface Level Understanding
and Deep Level Situation
Understanding
The audible information (e.g., speech and voice) and
visible information (e.g., gesture, posture, and facial
expression) are just the surface information of
humans. Thus the understanding of such surface
information is called surface level understanding in
this paper. If the understanding level is illustrated by
an iceberg (Figure 1), the audible and visible
information is just like a tip above the sea level of
the whole iceberg, while there still remain more
information hidden under the sea level such as
emotion, intention, and atmosphere. In contrast with
surface level understanding, the deep level situation
understanding is characterized by unifying the
surface level understanding, emotion understanding,
intention understanding, and atmosphere
understanding by adding a careful attention function
to the inference engine on the situation network
consisted of both universal knowledge and agent
dependent customized knowledge. The relationship
below the surface level understanding and the deep
level situation understanding is illustrated in Figure
1.
Figure 1: The relationship of the surface level
understanding and the deep level situation understanding.
Surface level understanding such as speech
understanding and gesture/posture understanding are
summarized in 2.2 and 2.3, respectively. Emotion
understanding, intention understanding, and
atmosphere understanding are summarized in 2.4,
2.5, and 2.6 respectively.
2.2 Speech Understanding
The spoken Dialog System (SDS) provides a
communication interface between the user and a
computer-based system with a restricted domain in
its manner of speech. In the SDS, the dialog is
conducted by predefined rules. It is not flexible
enough to adapt the natural dialog flow. A Markov
Decision Process based dialog system (Levin et al.,
2000) is proposed. They argued that a dialog system
can be mapped to a Markov Decision Process with
additional assumption about the state transition
DeepLevelSituationUnderstandinganditsApplicationtoCasualCommunicationbetweenRobotsandHumans
293

probabilities. A reinforcement learning algorithm is
employed to find the optimal strategy. The Partially
Observable Markov Decision Processes for dialogue
modelling (Williams et al., 2008) is proposed by
extending Markov Decision Processes, providing a
principled account of noisy observations. The result
outperforms that of Markov Decision Processes
based method.
2.3 Gesture/Posture Understanding
Computer vision based human gesture recognition
systems often get motion information of body parts
(hands and head) by applying a skin colour tracking
method. It is, however, easy to have noise caused by
objects which have similar colour to the skin. On the
other hand, application of accelerometer data to
gesture recognition is an emerging technique to
improve recognition performance. An air writing
system is proposed (Amma et al., 2010), which
recognizes the gestures of writing alphabets by using
wearable acceleration sensors.
A multimodal gesture recognition system is
proposed in (Yamazaki et al., 2010), where
information of both 3D acceleration and images are
combined based on fuzzy logic. In their study, when
the similarity calculated from the acceleration
recognition units is greater than a given threshold
value, the result from the accelerometer is taken as
the final result. In reverse, the image recognition
unit processes the candidate gestures that come from
the acceleration unit to get the final result. How to
decide the given threshold, however, should be
investigated to apply the method for other cases of
gestures in general.
To deal with these problems and to be able to
apply to fusing two units, a Choquet integral based
multimodal gesture recognition method is proposed
(Tang et al., 2011), where human gestures are
recognized based on the fusion of video images and
3D acceleration sensors. By calculating the optimal
fuzzy measures of the Camera-based recognition
unit and the accelerometer-based recognition unit,
the gesture recognition system achieves a
recognition rate over 92% for eight types of gestures.
2.4 Emotion Understanding
An automatic real-time capable continual facial
expression recognition system is proposed (Hommel
and Handmann, 2011) based on Active Appearance
Models (AAMs) and Support Vector Machines
(SVMs) where face images are categorized into
seven emotion states (neutral, happy, sad, disgust,
surprise, fear, and anger). An individual mean face is
estimated over time to reduce the influence of
individual features. Biosensor is also used for
emotion understanding. An online affect detection
system is proposed (Liu et al., 2008) by using
wearable biofeedback sensors. Physiological signals
(temperature, pulse cycle etc.) acquired form the
sensors are preprocessed and then classified by
Support Vector Machine (SVM).
In casual communication, emotion may be
expressed in both facial expression and voice. A
multimodal emotion recognition system is proposed
(Paleari et al., 2010) to recognize emotions from
audio sequence and static images.
2.5 Intention Understanding
Estimating the intention of human is also important
in Human-Robot Interaction. An intention reasoning
algorithm (Takagi et al., 2000) is proposed based on
a bidirectional associative memories driven support
system. A maximum entropy based intention
understanding method (Shimada et al., 2007) is
proposed for understanding the intention of speech
in a dialog system.
2.6 Atmosphere Understanding
In communication among multiple agents, e.g., a
conference with twenty participants, it may not be
easy to identify the attitude, mood, and emotion of
each individual. Instead the atmosphere of the entire
gathering becomes an important issue for smooth
communication. Several attempts have been made to
define the communication atmosphere. A 3D
coordinates with physical dimension, social
dimension, and mental dimension are built to
represent the atmosphere in human communications
(Rutkowski et al., 2004). To reflect the uncertainty
and subjectivity of the atmosphere as well as its
effect on the emotions of the individuals in many-to-
many communication, a concept of Fuzzy
Atmosfield (FA) is proposed (Liu et al., 2011) to
represent the atmosphere being created in the
process of interactive communication.
To adapt robot’s behaviour for smooth
communication in human robot interaction, a fuzzy
production rule based friend-Q learning method
(FPRFQ) is introduced (Chen et al., 2012). Based on
the FPRFQ, a behaviour adaptation mechanism is
proposed to solve the robots’ behaviour adaptation
problem.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
294

3 CASUAL COMMUNICATION
BASED ON DEEP LEVEL
SITUATION UNDERSTANDING
3.1 Deep Level Situation
Understanding
Although speech understanding, gesture/posture
understanding, emotion understanding, intention
understanding, and atmosphere understanding can
help robot to comprehend parts of human activities,
it is still not sufficient for casual Human Robot
Interaction. People usually hide their real emotions,
intentions, and opinions and show them in another
indirect/different way. These kinds of information
are just a reflection of the real emotions, intentions,
and opinions.
The deep level situation understanding is
characterized in 2.1. There are many instances of
deep level situation understanding in daily life. For
example, when you need someone’s help, you may
ask “Are you busy?” rather than “May I ask you for
a favour?” because of manners. Usually the person
you are talking to will know that you need his/her
help. Suppose you visit a convenience store and
want to buy a fountain pen. In this case, you may ask
the shop assistant that “Do you have a fountain pen?”
The shop assistant will know that you want to buy
this kind of pen. Even if it is a yes-no question,
neither “yes” nor “no” is expected to end the
conversation. If there are fountain pens in the shop,
the shop assistant will guide the customer to the
specific location of the fountain pens. If they do not
have this kind of pen, in order to provide satisfactory
service to the customer, they will guide the customer
to the shop where the fountain pen can be purchased.
Imagine a lady usually goes to a cafe for her
favourite coffee and dessert. The waiter/waitress in
the cafe knows the preference of their regular
customer. When this lady just orders “the usual one”
it is no doubt that the waiter/waitress will understand
the meaning and bring the desired drink and dessert
to her.
3.2 Situation Network
3.2.1 Multimodal Framework for Deep
Level Situation Understanding
The multi-modal framework for deep level situation
understanding is shown in Figure 2. Speech content,
emotion, gesture/posture, Speech information
recorded with the microphone is processed into
speech content by speech recognition system.
Meanwhile, emotion state can be estimated from
acoustic features of the speaker. Sometimes emotion
may be expressed by facial expressions. Emotion
expressed on the face can be recognized by facial
expression based emotion recognition algorithm
(e.g., Hommel et al., 2011). Atmosphere can be
estimated based on the emotion state of the agents.
Atmosphere information also can be estimated from
the emotion changes in the conversation.
Gestures/Postures can be recognized by gesture
recognition algorithms (e.g., Tang et al., 2011) from
sensors like cameras and accelerometers.
Figure 2: Framework for Deep Level Situation
Understanding.
3.2.2 Situation Network
Figure 3: Situation network.
Careful attention from agents, speech content,
knowledge (including universal knowledge and
customized knowledge), emotion, atmosphere, and
gesture are employed by the situation network for
reasoning an appreciated response to the
communication situation. The situation network
consists of a semantic layer, an intention layer, and
an expression layer, as shown in Figure 3. The
semantic layer is composed of nodes and links. The
nodes in the semantic layer denote objects. The
edges between two nodes are the relationship of
nodes. The semantic layer can be established with
universal and customized agent-dependent
knowledge in advance. The information achieved
from the communication (e.g., speech content and
DeepLevelSituationUnderstandinganditsApplicationtoCasualCommunicationbetweenRobotsandHumans
295
gestures/postures) are employed to infer the key
nodes in the semantic layer.
The intention of the interaction can be inferred
from the key nodes of the semantic layer to the
intention layer by referring to information like
current emotion state, atmosphere, and knowledge
(including universal knowledge and customized
agent-dependent knowledge). Finally with the
comprehensive consideration of the current emotion
state, atmosphere, universal and customized agent-
dependent knowledge, and careful attention, suitable
response (speech, voice, and gesture/posture) will be
reasoned as the final reaction.
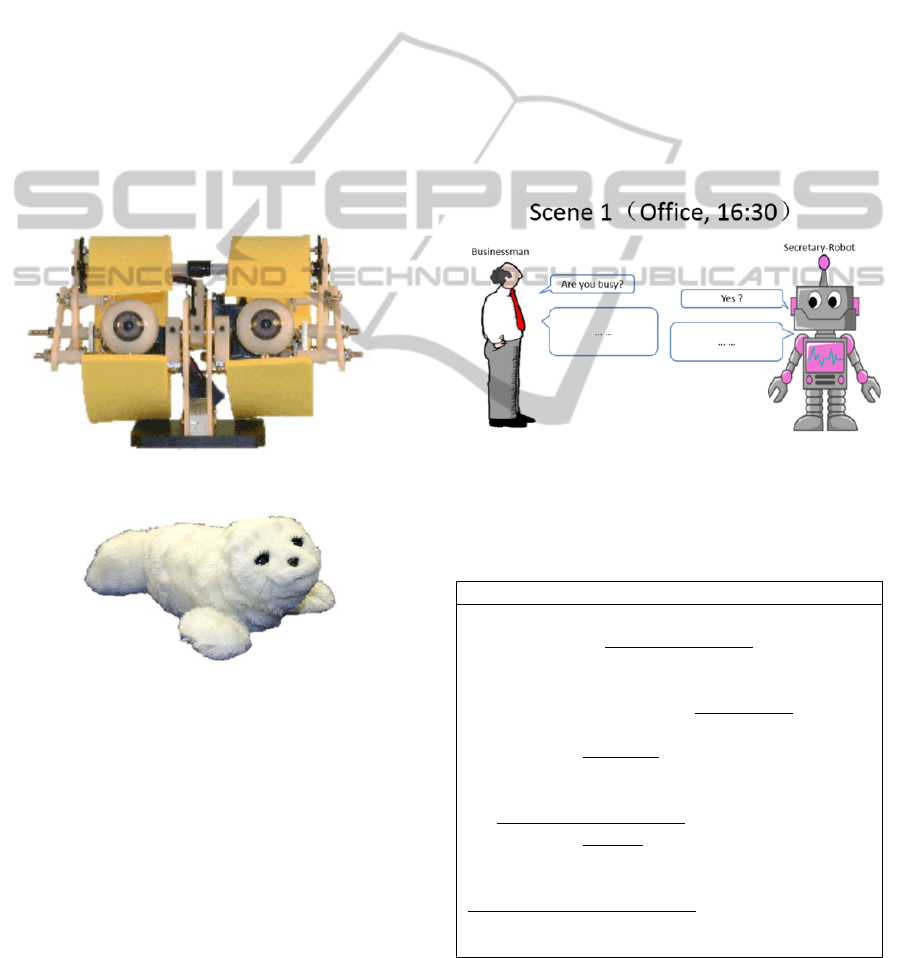
4 DEMONSTRATION SCENARIO
ON “ONE DAY
OF A BUSINESS MAN”
Figure 4: Eye robot.
Figure 5: PARO robot.
To illustrate the applicability of the proposed deep
level situation understanding mechanism, a
demonstration scenario, entitled “One day of a
businessman”, is established to narrate several
communication activities between a businessman
and secretary-robot/human-boss/waitress-robot/
human-partner/therapy-robot (PARO) in one day.
Six episodes of deep level situation communication
are created with comprehensive consideration of
speech content, gesture, emotion, intention,
atmosphere, universal knowledge and customized
agent-dependent knowledge, and careful attention
function. In the scenario, the businessman is asked
to reserve a meeting room with a secretary-robot for
remote TV meeting. After reporting to his boss, he
notices that he made a mistake reserving the meeting.
He asks the secretary-robot to help him to change
the meeting schedule. After one day’s hard work, he
goes to a small Japanese-style restaurant for his
favourite food. In both cases that a businessman
goes to the restaurant as a new customer and the
case that the businessman goes to the restaurant as a
regular customer are demonstrated for comparing
the surface level communication and deep level
communication. The communication between the
businessman and his wife is narrated in the last
scene 6.
The scenario is demonstrated by four humans,
two eye robots (Figure 4), and a therapy-robot
PARO (Figure 5).The script of the scenario is shown
in Table 1-6 and the scenes are shown in Figure 6-11.
Figure 6: Reserving the meeting room.
Table 1: The businessman talks with a secretary-robot to
reserve a meeting room. (E, I, A, K, and C stand for
Emotion, Intention, Atmosphere, customized Knowledge,
and Careful attention, respectively).
Place: O
ff
ice, Time: 16:30
Businessman: Are
y
ou bus
y
now?
Secretar
y
-robo
t
: Ma
y
I help
y
ou (
I
)?
Businessman: Is the meeting room available after
3 PM this Thursda
y
?
Secretary-robo
t
: It could be reserved (
I
) after
3:30 pm.
Businessman: Great (
I
)! A quiet meeting room
will be better.
Secretary-robo
t
: Yes, it’s the meeting room on
the 17
th
floor as alwa
y
s (
K
).
Businessman: Fine (
I
). Please reserve it till 5 pm,
as we’ll have a meeting with our branch office.
Secretary-robo
t
: No problem. I’ll also reserve the
TV conference s
y
stem (
I
,
C
) for
y
ou.
Businessman: Thank you so much!
Robo
t
: You’re welcome.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
296

Table 2: The businessman reports to his boss and found
the meeting date he reserved was wrong.
Place: Office, Time: 16:50
Businessman: Boss, is it OK now?
Boss: What’s up? (I)
Businessman: I have reserved the meeting room and TV
system for the meeting with the branch office.
Boss: Great! Good job (C)! It’s the next Thursday, right?
Businessman: Ah, I’ve got it wrong. I reserved it on this
Thursday.
Boss: Oh, not again! (K)
Businessman: I’m going to change it right away (I, A). I
apologize for that.
Boss: Be careful this time.(I)
Businessman: Yes, Sir. I’m so sorry. I’m leaving now.
Figure 7: Reporting to boss.
Figure 8: Changing the meeting date.
Table 3: The businessman returns to the robot to change
the reservation date.
Place: Office, Time: 16:55
Businessman: Are you available now?
Robot: Yes, please (I, A).
Businessman: Sorry (C), may I change the reservation
of the meeting with branch office to next Thursday?
Robot: Got it! I’m checking (I) the status of meeting
room right now (E).
Businessman: Great. Please help to check (C).
Robot: All of the meeting rooms on the 17th floor have
been reserved on next Thursday. How about meeting
room on the 11th floor (K)?
Businessman: Thanks a lot! You really saved me!
Robot: The reservation of the TV conference system
also needs to be changed (I, C), right?
Businessman: Sure. Thank you as always (C)!
Robot: You’re welcome!
Table 4: A waitress-robot entertains an ordinary customer
in a small Japanese-style restaurant.
Place: Small Japanese-style restaurant, Time: 18:00
Waitress-robot: Hi, may I help you?
Businessman: [abnormal face] Hi.
Waitress-robot: Which seat do you prefer?
Businessman: Next to the window.
Waitress-robot: May I take your order now?
Businessman: Yes, I want to have a stewed fish, please.
Waitress-robot: Would you like something to drink?
Businessman: Draft beer.
Waitress-robot: Just a moment please, Sir.
Businessman: All right.
Figure 9: At the restaurant as a new customer.
Figure 10: At the restaurant as a regular customer.
Table 5: A robot entertains a regular customer in a small
Japanese-style restaurant.
Place: Small Japanese-style restaurant, Time: 18:00
Businessman: [abnormal face] Hi!
Waitress-robot: Hi. Take your usual seat (K) please. Is
there anything wrong (E, C, K, A)?
Businessman: Yeah, a little bit.
Waitress-robot: Let forget the unpleasantness with
delicious cooking!
Businessman: Thank you (E, C).
Waitress-robot: Is the usual (K) order, OK?
Businessman: Yes.
Waitress-robot: Draft beer (K) for drinks, is OK?
Businessman: OK. Thanks (C)!
Waitress-robot: Green soybeans are also served for free
(E, C, K).
Businessman: Wonderful! Thank you!
DeepLevelSituationUnderstandinganditsApplicationtoCasualCommunicationbetweenRobotsandHumans
297

Table 6: The businessman goes back home and talks with
his wife.
Place: Home, Time: 21:00
Businessman: [feeling down voice] I'm home!
Wife: Welcome back! Are you drinking (K)?
Businessman: Well…
PARO: (Joyful) sound as owner is back.
Businessman: Yeah. Hello, PARO.
PARO: (Joyful) sound as respond to owner’s greeting.
Wife: Would you like to take a bath or a cup of tea?
Businessman: Well…
Wife: What happened (E, A, K)?
Businessman: Well…
Wife: Made a mistake (A, K)?
Businessman: Yes…
Wife: “Hana” was waiting for you!
Businessman: For playing game together (I, K)?
Wife: Yes.
Businessman: Tomorrow (K), I’ll play with her. I’m a
little bit tired.
Wife: OK, I will prepare the bath (I, C).
Businessman: Well, thanks.
Figure 11: At home.
A surface level understanding between a human and
a robot is shown in scene 4; while a deep level
situation understanding is narrated in scene 5.
Because the waitress-robot in the scene 5 knows the
face of the businessman, she is aware that something
bad happened to the businessman. Because he is a
regular customer to this restaurant, the waitress-
robot know his taste well and offers comfortable
service to the businessman. Based on the abnormal
facial expression, the waitress-robot notice that the
regular customer is a little sad. So she serves a
friend-like service to warm the customer.
5 CONCLUSIONS
A story of “one day of a business man” demonstrates
the deep level situation understanding in casual
communications among humans and
robots/machines. As shown in scene 3, when the
business man tells the secretary-robot that he made a
mistake on the meeting date, the robot estimates his
intention of re-reserving the meeting room; the robot
also knows he is in a hurry to change it. So the
secretary-robot responses by “checking the meeting
room immediately” to calm the businessman down.
After changing the date, the secretary-robot also
informs the businessman to change the reservation
of the TV conference system to avoid mistake. This
kind of high level communication may be
impossible in surface level communications.
Not only surface level understanding (e.g.,
speech/voice recognition, gesture/posture
recognition), emotion understanding, intention
understanding, and atmosphere understanding but
also customized agent-dependent and universal
knowledge, and a careful attention mechanism are
considered for smoothing and naturalizing
communication among humans and robots/machines.
The proposal aims at making the robot have high
level human-like communication abilities. This will
reduce the burden on human when interacting with
robots/machines. By considering the customized
agent-dependent knowledge in human-robot
communication, it will help robots/machines to
understand the usual way in communication and
avoid unnecessary troubles and misunderstandings.
With the comprehensive consideration of
speech/voice, gesture/posture, emotion, intention,
atmosphere, and knowledge (including universal and
customized knowledge), the proposal will smooth
the communication between humans and
robots/machines as well as create a peaceful,
pleasant, and prosperous society consisting of
humans and various specification robots.
More and more, robots are required to do house
work, care the elder, look after children, and work in
the office. Hence the ability to communicate with
persons at all ages is becoming essential. The
proposal can smooth human robot interactions by
considering necessary factors (e.g., customized
agent-dependent knowledge) in communications.
Furthermore the proposed deep level situation
understanding may help to build the coexistence and
co-prosperity in the human-robot society in the near
future.
ACKNOWLEDGEMENTS
This research project is supported by Japan Society
for the Promotion of Science (No.21300080).
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
298

REFERENCES
Amma, C., Gehrig, D., & Schultz, T., 2010. Airwriting
recognition using wearable motion sensors. In
Proceedings of the 1st Augmented Human
International Conference. ACM.
Chen, L., Liu, Z. et al., 2012. Multi-Robot Behavior
Adaptation to Communication Atmosphere in
Humans-Robots Interaction Using Fuzzy Production
Rule Based Friend-Q learning, International
Symposium on Soft Computing.
Hommel, S., & Handmann, U., 2011. AAM based
continuous facial expression recognition for face
image sequences. In Computational Intelligence and
Informatics (CINTI), 2011 IEEE 12th International
Symposium, 189-194.
Jung, S., Lee, C., Kim, K., Jeong, M., & Lee, G. G., 2009.
Data-driven user simulation for automated evaluation
of spoken dialog systems. Computer Speech &
Language, 23(4), 479-509.
Levin, E., Pieraccini, R., & Eckert, W., 2000. A stochastic
model of human-machine interaction for learning
dialog strategies. Speech and Audio Processing, IEEE
Transactions, 8(1), 11-23.
Liu, C., Conn, K., Sarkar, N., & Stone, W., 2008. Online
affect detection and robot behavior adaptation for
intervention of children with autism. Robotics, IEEE
Transactions on Robotics, 24(4), 883-896.
Liu, Z. T., Dong, F. Y., Hirota, K., Wu, M., Li, D. Y., &
Yamazaki, Y., 2011. Emotional states based 3-D
Fuzzy Atmosfield for casual communication between
humans and robots. In Fuzzy Systems (FUZZ), 2011
IEEE International Conference, 777-782.
Paleari, M., Huet, B., & Chellali, R., 2010. Towards
multimodal emotion recognition: a new approach. In
Proceedings of the ACM International Conference on
Image and Video Retrieval, 174-181.
Rutkowski, T. M., Kakusho, K., Kryssanov, V., & Minoh,
M., 2004. Evaluation of the communication
atmosphere. In Knowledge-based intelligent
information and engineering systems, 364-370.
Sasajima, M., Yano, T., & Kono, Y., 1999. EUROPA: A
generic framework for developing spoken dialogue
systems. In Proc. of EUROSPEECH’99, 1163-1166
Shan, C., Tan, T., & Wei, Y., 2007. Real-time hand
tracking using a mean shift embedded particle filter.
Pattern Recognition, 40(7), 1958-1970.
Shimada, K., Iwashita, K., & Endo, T., 2007. A case study
of comparison of several methods for corpus-based
speech intention identification. In Proceedings of the
10th Conference of the Pacific Association for
Computational Linguistics, 255-262.
Takagi, T., Nishi, T., & Yasuda, D., 2000. Computer
assisted driving support based on intention reasoning.
In Industrial Electronics Society, 2000. IECON 2000.
26th Annual Confjerence of the IEEE, (1), 505-508.
Tang, Y., Hai, V. et al., 2011. Multimodal Gesture
Recognition for Mascot Robot System Based on
Choquet Integral Using Camera and 3D
Accelerometers Fusion. Journal of Advanced
Computational Intelligence and Intelligent
Informatics. (15), 563-572
Vinciarelli, A., Pantic, M., Bourlard, H., & Pentland, A.,
2008. Social signal processing: state-of-the-art and
future perspectives of an emerging domain. In
Proceedings of the 16th ACM international conference
on Multimedia, 1061-1070.
Williams, J. D., Poupart, P., & Young, S., 2008. Partially
observable Markov decision processes with
continuous observations for dialogue management. In
Recent Trends in Discourse and Dialogue, 191-217.
Yamazaki, Y., Vu, H et al., 2010. Gesture recognition
using combination of acceleration sensor and images
for casual communication between robots and humans.
In Evolutionary Computation, 1-7.
DeepLevelSituationUnderstandinganditsApplicationtoCasualCommunicationbetweenRobotsandHumans
299
