Building and Exploiting Maps in a Telepresence Robotic Application
Javier Gonzalez-Jimenez, Cipriano Galindo, Francisco Melendez-Fernandez and J. R. Ruiz-Sarmiento
Universidad de M´alaga, System Enginnering and Automation Dpt., M´alaga, Spain
Keywords:
Telepresence Robotics, Mapping, Assistive Robotics, Teleoperation.
Abstract:
Robotic telepresence is a promising tool for enhancing remote communications in a variety of applications. It
enables a person to embody a robot and interact within a remote place in a direct and natural way. A particular
scenario where robotic telepresence demonstrates its advantages is in elder telecare applications in which a
caregiver regularly connects to the robots deployed at the apartments of the patients to check their health.
Normally, in these cases, the caregiver may encounter additional problems in guiding the robot because s/he is
not familiar with the houses. In this paper we describe a procedure to remotely create and to exploit different
types of maps for facilitating the guidance of a telepresence robot. Our work has been implemented and
successfully tested on the Giraff telepresence robot.
1 INTRODUCTION
In the last years, robotic telepresence is receiving a
great deal of attention from the robotic community,
especially when applied to the social interaction of
the elderly (Coradeschi et al., 2011; Tsui et al., 2012).
Robotic telepresence refers to a combination of tech-
nologies that enables a person to be virtually present
and to interact in a remote place by means of a robot.
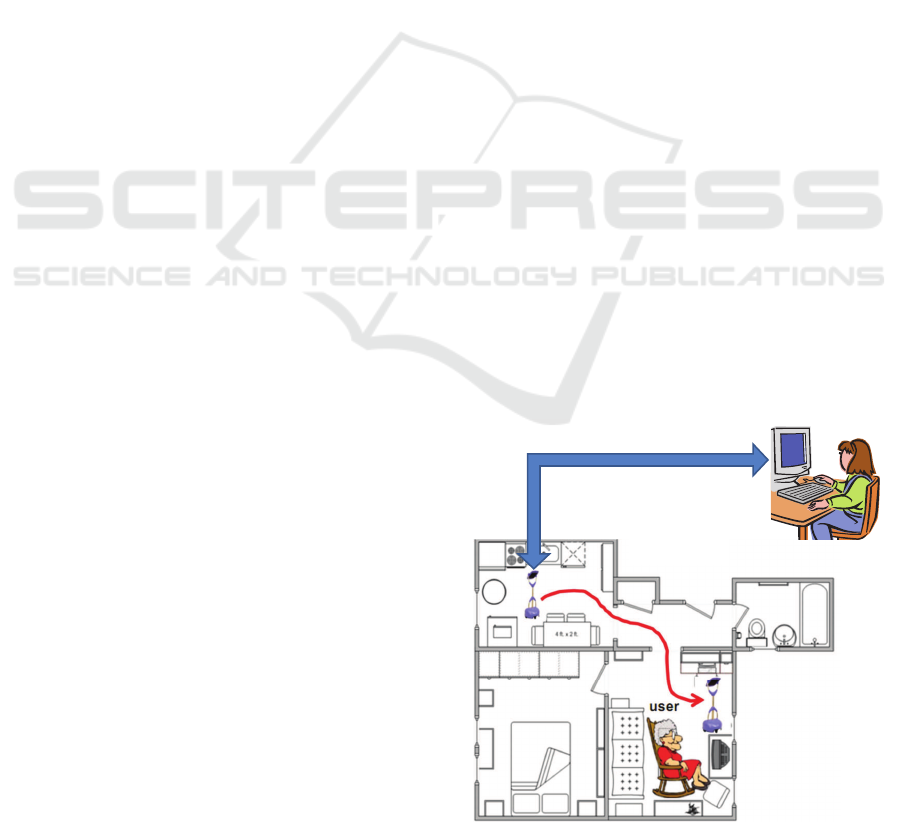
Briefly, a visitor takes the control of a mobile robot
that physically interacts with the user that receives the
service (see figure 1). The result is that the user iden-
tifies somehow the robot as the person who is control-
ling it, i.e. the visitor, and establishes a social relation
as s/he was actually in the place. A typical scenario
where robotic telepresence becomes relevant is its uti-
lization by healthcare personnel, e.g. nurses and doc-
tors, to carry out professional visits to a number of
patients to check their general health and mental state
from anywhere. In these cases, as well as in other
situations where the visitor is not familiar with the
house, it is of a great help to provide the visitor with
a schematic map of it where the real-time position of
the robot is displayed.
Considering maps of the environment in robotic
teleoperation is a generally neglected issue: it is as-
sumed that the human abilities are enough for guiding
a robot evenif the environmentis unknown. However,
the advantages of enhancing the graphical teleopera-
tion interface with a map are clear in terms of safety,
convenience and efficiency of the robot teleoperation.
In this work we present an intuitive and interactive
process that permits the visitor, i.e. the person who
drives the robot, to create and productively exploit
maps in a telepresence application.
visitor
Giraff
Internet
Figure 1: Robotic telepresence application. The visitor re-
m
otely drives the robot deployed in the user’s apartment and
interacts with her through videoconferencing.
The developed work is framed in the project
ExCITE –Enabling SoCial Interaction Through
Embodiment– (Coradeschi et al., 2011) under the
Ambient Assisted Living European Joint Programme
and GiraffPlus –Combining social interaction and
322
Gonzalez-Jimenez J., Galindo C., Melendez-Fernandez F. and R. Ruiz-Sarmiento J..
Building and Exploiting Maps in a Telepresence Robotic Application.
DOI: 10.5220/0004482303220328
In Proceedings of the 10th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2013), pages 322-328
ISBN: 978-989-8565-71-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

long term monitoring for promoting independent
living– funded by EU within the FP7th. Within such
projects, several prototypes of a telepresence robot
called Giraff (see figure 2) have been deployed at the
elders’ homes, enabling healthcare personnel and rel-
atives to interact with them. Initial results from the
evaluations on the use of the Giraff robots by non-
technological users reveal that in spite of the clear
benefits of telepresence robots, there are still some
hurdles that complicate the commercial deployment
of this technology. A significant and recurrent limita-
tion reported by the visitors, is the disorientation they
suffered when they teleoperate the robot, especially in
large or unknown environments. This problem wors-
ens when the visitor is a caregiver that visits a number
of patients.
This paper addresses this issue and proposes
an intuitive map building mechanism that permits
a non-tecnological visitor to construct a geometric-
topological map of the environment while teleoperat-
ing the robot. The obtained map is used for two pur-
poses. First, to localize the robot in real-time by ap-
plying well-known robotics techniques, and second,
extract from it a schematic plan which is integrated
into the graphical interface to display the pose of the
robot within the apartment. This map also enables
the visitor to give high-level navigational commands
to the robot, e.g. “go to the kitchen”, if the robot
is featured with autonomous navigation algorithms.
The approach presented here extends a previous work
(Gonz´alez-Jim´enezet al., 2012) that addressed a num-
ber of improvements on the Giraff telepresence robot,
including a preliminary solution for mapping and lo-
calization. The major differences and new contribu-
tions of the presented work w.r.t. the previous ones
are:
• An interactive method for map building specially
targeted to non-technological users.
• The map building process is completely carried
out at the visitors’ side.
• The visitor can easily update the entire map or
parts of it when needed.
The structure of the paper is as follows. Section
2 describes the Giraff telepresence robot. Section 3
gives a general overview of the proposed map build-
ing process. Next, section 4 presents the software ar-
chitecture and modules developed in our implementa-
tion. Finally some conclusions and discussions on the
advantages of exploiting maps in robotic telepresence
are outlined.
2 THE GIRAFF TELEPRESENCE
ROBOT
The Giraff robot, or simply Giraff, is a telepres-
ence robot developed by the Giraff AB company (Gi-
raff, 2013). It consists of a motorized wheeled plat-
form endowed with a videoconferencing set, includ-
ing camera, microphone, speaker and screen. Giraff
permits a virtual visitor to move around, perceive the
environment(audio and video), and chat with the user.
The height of Giraff, the streaming of the visitor cam-
era on the screen, and the possibility of tilting the Gi-
raff’s head help in establishing a friendly interaction
with the user who can experience that the visitor is at
home.
,ŽŬƵLJŽ
>ĂƐĞƌ
Figure 2: The Giraff telepresence robot equipped with a
laser range scanner for map building and localization.
From a technical point of view, Giraff relies on a
low-cost, commercial computer onboard. The batter-
ies of Giraff last, approximately, two hours and are
charged by docking the robot at a station plugged to a
normal wall socket of the house.
The Giraff manufacturer provides a software ap-
plication, called the Giraff Pilot, to easily teleoper-
ate the system. Pilot, is essentially a graphical in-
terface for driving the robot and controlling the stan-
dard videoconference options, i.e., to initiate/hang-up
BuildingandExploitingMapsinaTelepresenceRoboticApplication
323

a call, and to adjust the speaker and microphone vol-
ume (see figure 3). At the Giraff side, a server is
continually running, accepting calls and providing the
needed functionality for videoconferencing and mo-
tion commands. All the actions needed from the elder
to handle Giraff can be very easily accomplished with
a remote controller. Thus, one of the major advan-
tages of the Giraff telepresence robot is that neither
the user nor the visitor need any technological skill to
use it, and they both can manage the system (Pilot and
Giraff) in an intuitive and natural way.
Figure 3: The teleoperation interface Pilot. The visitor
guides the robot by drawing the desired trajectory on the
screen.
In order to feature the commercial version of the
Giraff robot with the capability of building a map of
the house and compute its position in it, the robot has
been equipped with a proper 2D range laser scanner
URG-04LX-UG01 (Hokuyo, 2013) attached on its as
shown in figure 2. This type of sensors have a ma-
ture technology, widely used in robotics systems for
carrying out mapping, localization and obstacle de-
tection tasks. The main characteristics of the selected
model are: a field of view of 240 degrees with a res-
olution of 0.36, an operational range up to 4 metres
and a working frequency of 10 Hz.
3 THE MAP BUILDING PROCESS
The map building process presented in this work in-
volves de following steps:
1. The visitor initiates the mapping process through
the corresponding button in the client interface
(see figure 4b), being then requested to drive the
Giraff robot within the house, visiting all the
rooms to be included in the map. During the nav-
igation, the robot odometry and the readings from
the scan laser are continuously gathered and sent
to the client using the MQTT protocol (Hunkeler
et al., 2008).
2. When the visitor decides to finalize the map con-
struction (switching off the “build map” button),
an implementation of the ICP algorithm (Besl and
McKay, 1992) is run in his computer to register all
the received scans, generating a point-based map.
This geometric map is sent to the robot, which
will use it for localization purposes (Blanco et al.,
2010).
3. The resultant geometric map is presented to the
visitor who is asked to add labels, graphical ele-
ments, and a topology of distinctive places in or-
der to produce a human-friendly, schematic map
of the environment.
4. Both, the geometric and the schematic maps, are
registered one to another to relate their coordinate
systems (meters and pixels, respectively). This
is essential to translate pixel-related information,
e.g. the visualization of the position of the robot,
to geometric-related data, i.e. the (x, y) position
of the robot, and vice versa.
5. At any moment, the visitor can update the built
map to reflect modifications in the apartment, e.g.
changes of the furniture’s layout.
Figure 4 depicts the most relevant parts of the in-
terface we have developed to incorporate all the map-
ping functionalities. Note that the presented approach
can be applied to any other telepresence robot with
minimal changes to accommodate to its particulari-
ties.
Next, each step of the map building process is de-
scribed in more detail:
3.1 Recording Sensorial Data
The interactive mapping process is initiated by the
visitor who remotely drives the Giraff robot, while
scans are continuously collected. The posterior map
building algorithm combines such data which may re-
quire a considerable computational effort. Given the
limited computational resources of Giraff, the col-
lected data is transmitted to the remote client to run
the geometric map building algorithm. Concretely, in-
formation from the wheels’ encoders (odometry) and
range data from the radial laser scanner are transmit-
ted using the MQ Telemetry Transport protocol (Hun-
keler et al., 2008), that is a suitable solution in mo-
bile applicationswith limited resources. This protocol
is based on a simple publish/subscribe fashion, espe-
cially designed for sensorial data transmission.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
324

a)
b)
Figure 4: Client interface. a) Navigational view. b) Window
devoted to the mapping process.
In our implementation we consider two messages
published by the robot, i.e.
odometry
and
scan
. The
odometry message contains 2 float numbers, i.e., the
odometric position (x, y) of the robot, and the scan
message contains 361 integers, i.e. the distance in
cm. to the closest obstacles in a range of 240
◦
. Mes-
sages are sent at 1Hz., so the transmission rate is ap-
proximately 1.5 Kb/s. The client, in its turn, is sub-
scribed to these messages and stores them until the
exploration phase ends.
3.2 Geometric Map building
For building a geometric map upon the received
scans, the system runs an implementation of the It-
erative Closest Point algorithm –ICP– (Besl and
McKay, 1992) from the Mobile Robot Programming
Toolkit (MRPT, 2013). ICP aims to register point-
based data coming from a number of scans by find-
ing the geometrical transformations that minimizes
the square error between the registered points. This
gradient descent method has been extensively used in
the robotics arena, being known as scan matching.
Figure 5 shows an example of the resultant geo-
metric map constructed in one of our testsites. Notice
Figure 5: Example of a constructed geometric map. In red,
one of the scans taken by Giraff during the map building
process.
that this map, although essential for robot localiza-
tion, is not appropriated for human interaction.
3.3 Topological and Schematic Map
The generated geometric map is enriched in this phase
by the visitor in order to produce a suitable schematic-
topological map. For that, s/he is asked to perform the
following two steps:
1. Create a schematic map by adding graphical ele-
ments that represent pieces of furniture and envi-
ronment structures, like doors, walls, etc., and
2. Create a topological map by selecting distinc-
tive places, connections, and friendly names, e.g.
kitchen, corridor, bedroom, etc.
While the former only aims at enhancing the vi-
sualization of the environment, the latter, i.e., the cre-
ation of a topology, including human-friendly labels,
opens interesting possibilities for identifying particu-
lar rooms of the elder home and for using this high-
level information as destinations for reactive naviga-
tion
1
.
In the current implementation, the visitor can add
distinctive places within the map by clicking on the
desired point and adding an intuitive label (see figure
4b). Places, represented by nodes, can be, if desired,
connected through arcs to indicate the possibility to
go from one place to the other.
Regarding the schematic map, the client interface
does not integrate drawing capabilities, so it requests
the visitor to draw a sketch over the provided geomet-
ric one through any external drawing software, e.g.
1
Although the literature normally assumes that telepres-
ence is based on teleoperation, we extends here the conve-
nient feature of robotic semi-autonomy.
BuildingandExploitingMapsinaTelepresenceRoboticApplication
325

Figure 6: Example of a schematic map constructed over the
geometric map utilizing external drawing tools.
MS Visio (see figure 6). The resulting image file is
then incorporated into the interface for visualization
and robot commanding purposes.
3.4 Transformation between the
Geometric and Schematic Maps
To properly translate pixel-related commands, e.g.
showing the localization of the robot within the
schematic map, into geometrical-related information,
e.g. the real (x, y) position of the robot, some trans-
formation is needed.
The construction of the geometric map establishes
the initial robot position as the geometrical coordi-
nates’ center of the map. When the ICP finalizes, and
the dimensions, i.e. width and length in metres, of the
apartment are known, our software generates a bitmap
file and computes the pixel/metres relation for each
particular environment. Given that the schematic map
is constructed over the geometric one, the computed
relation is kept and serves to transform robot destina-
tion points in pixels into geometrical coordinates and
vice versa.
3.5 Map Update
The utility of static geometric maps is certainly lim-
ited when dealing with dynamic environments. The
addition, removal or displacement of pieces of fur-
niture may degrade the performance and accuracy of
the self-localization process. For tackling this issue
the visitor can update parts of the map at anytime by
repeating the mapping process on a selected area. The
system re-runs the ICP algorithm to create a new up-
dated version of the geometrical map. The need of
updating the map is advised by the system based on
the accuracy yield by the localization module.
TCP
Video Conferencing
MQTT
Sensorial Data &
Robot’s Commands
BlackboardBlackboard
Motors’
controller
Laser
manager
Rawlog
grabber
LocalizationLocalization
Reactive
navigator
Global
navigator
dest_x, dest_y
x,y, theta
lin_vel, ang_vel,
dest_arrived
x_odo, y_odo, theta_odo
r1,r2,…r361
Client interface
Giraff
Figure 7: Software architecture. Modules from the robotic
architecture share information through the blackboard. The
client interface interacts with the robot by directly accessing
to the blackboard and through a MQTT channel established
in the rawlog-grabber component.
4 SOFTWARE ARCHITECTURE
The software architecture considered for our map
building application and the posterior usage of the
constructed maps (outlined in section 5) is illustrated
in figure 7. It is divided in two parts: the client inter-
face that runs on the visitor’s computer, and a robotic
architecture in the side of Giraff that manages and
controls its motors and sensors. All software mod-
ules have been implemented in C++, using the MRPT
toolkit (MRPT, 2013).
In the client side, the interface has been imple-
mented as a single program with two communication
channels with the robot: a TCP socket for videocon-
ferencing, and a MQTT channel for exchanging sen-
sorial data and commanding the robot.
In the Giraff side, we rely on the OpenMORA ar-
chitecture (Mapir, 2013), a particular robotic architec-
ture based on MOOS (Newman, 2003), that consid-
ers a general, centralized blackboard from which the
connected modules can share information by publish-
ing and subscribing to particular topics. This internal
communication is implemented by local TCP sockets.
The components that run on the Giraff robot can
be divided into low and high-level modules. Low-
level ones provide a basic access to sensors and actu-
ators and are directly involved in the localization and
mapping process. These include:
• Motors’ Controller. This module manages the Gi-
raff motors and is in charged of establishing the
desired robot velocities as well as of reading the
odometry of the robot. The interaction with the
blackboard is done by its subscription to these
topics.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
326

• Laser Manager. It collects scans from the laser
scanner and continuously publishes the range data
of the most recent scan into the blackboard.
• Rawlog Grabber. This module transmits the robot
odometry and the collected scans published in the
blackboard to the client interface using the MQTT
protocol.
On the other hand, the high-levelmodules are soft-
ware components that perform data processing for ex-
ploiting the created map. These modules are:
• Robot Localization. Giraff self-localization is per-
formed by a Particle Filter technique which esti-
mates the pose (position and orientation) within
the already known map, represented as a two-
dimensional occupancy grid model, through a
probabilistic Bayesian framework that resembles
Montecarlo simulation (Blanco et al., 2010).
Given the limited performance of the Giraff on-
board computer and the considerable computa-
tional burden of the particle filter algorithm, the
localization process is executed at a low rate
(2Hz) and with a reduced (but sufficient) number
of particles. For visualization purposes, the pose
of the robot is displayed on the map at a higher
rate using the odometry positioning, which works
at 20Hz.
• Reactive Navigator. A reactive navigator auto-
matically guides the robot to a nearby point ne-
gotiating the detected obstacles. It uses the robot
pose and the sensor observations to derive the
proper motors’ commands to go from a point ’A’
to a point ’B’ negotiating any (possibly dynamic)
obstacle found in the path.
Concretely we have endowed the Giraff robot
with a reactive navigation approach based on
Parametrical Trajectory Generators –PTG– that
has successfully proved its performance and re-
liability in cluttered spaces (Blanco et al., 2008).
In short, the underlying idea of the PTG-based re-
active navigator is to abstract both the geometry
of feasible paths and the robot shape into a space
transformation, in such a way that simpler obsta-
cle avoidance methods (designed to deal with cir-
cular, holonomic robots) can be used to determine
the next robot movement into such transformed
space.
• Global Path Planner. This module uses the topo-
logical map created by the user to search for a
path from the current position of the robot to the
destination given by the user in terms of labels,
e.g. “kitchen”, “livingroom”, etc. The global
path planner complements the reactive naviga-
tion which is not appropriated for far destinations,
since it only takes into account the current percep-
tion of the robot. In contrast, the global navigator
exploits the topological map enabling the user to
choose a destination through its label. The global
navigator executes an A* algorithm (Hart et al.,
1968) to search the shortest path to the goal in the
created topology, producing a sequence of nodes,
i.e. distinctive places, connected by arcs. Each
node stores the geometrical position, (x, y), of the
place in the coordinate system of the robot, and
are sequentially sent to a reactive navigator, which
is fed with the geometrical position of the next
node of the path until the destination is reached.
5 DISCUSSION
AND CONCLUSIONS
Enhancing the teleoperation interface with maps
brings a number of advantages for the robot driver.
On the one hand s/he can benefits from a certain de-
gree of navigational autonomy which explicitly re-
quires some type of world representation. Although
telepresence implies the continuous and effective par-
ticipation of a human controlling the robot, providing
certain automatic maneuvering can be desirable. For
instance when a driver wants to traverse long corri-
dors or pass through narrow spaces, s/he would prefer
to delegate these bored and unpleasant tasks directly
to the robot. This leads to a reduction of the mental
attention and workload of the visitor who can focus
on the social or professional communication which is
the ultimate aim of a telepresence robot. For exploit-
ing this feature, the visitor should be able to select a
nearby destination in any representation of the space,
arising thus the need of a convenient map. Moreover,
apart from relying on a reactive navigator to relieve
the visitor from maneuvering, the use of a topologi-
cal map is required to also enable him to establish a
global, distant destination given in terms of friendly,
well-known labels, e.g. kitchen.
On the other hand, having a graphical represen-
tation of the real time position of the robot within a
schematic map of a house is especially useful for the
visitor to facilitate the teleoperation and eliminating
her/his very likely disorientation.
These remarks motivate the need of having a con-
venient representation of the environment for robotic
telepresence applications. In this paper, we have de-
scribed a map building process that builds upon well-
known robotic techniques, and a graphical interface
that permits the visitor to remotely construct and ex-
ploit the map in the terms aforementioned. The re-
sult has been tested in several testsites in Spain with
BuildingandExploitingMapsinaTelepresenceRoboticApplication
327

the Giraff telepresence robot proving the suitability of
our approach for this type of applications.
Our short-term research aims at providing depend-
ability to the system by incorporating a RGB-D cam-
era (Kinect-like) which helps in the localization and
obstacle detection tasks.
ACKNOWLEDGEMENTS
This work has been supported by two projects: the
EXCITE project, funded by AAL (Ambient Assisted
Living) Program and Instituto de Salud Carlos III, and
by GiraffPlus, funded by EU under contract FP7 - ICT
- #288173.
REFERENCES
Besl, P. J. and McKay, N. D. (1992). A method for registra-
tion of 3-d shapes. IEEE Trans. Pattern Anal. Mach.
Intell., 14(2):239–256.
Blanco, J.-L., Gonz´alez-Jim´enez, J., and Fern´andez-
Madrigal, J.-A. (2008). Extending obstacle avoidance
methods through multiple parameter-space transfor-
mations. Autonomous Robots, 24(1):29–48.
Blanco, J.-L., Gonz´alez-Jim´enez, J., and Fern´andez-
Madrigal, J.-A. (2010). Optimal filtering for non-
parametric observation models: Applications to lo-
calization and slam. The International Journal of
Robotics Research (IJRR), 29(14).
Coradeschi, S., Kristoffersson, A., Loufti, A., Rump, S. V.,
Cesta, A., Cortellessa, G., and Gonz´alez-Jim´enez, J.
(2011). Towards a methodology for longitudinal eval-
uation of social robotic telepresence for elderly. 1st
Workshop on Social Robotic Telepresence, held at
HRI 2011.
Giraff (2013). Giraff A.B. Technologies.
http://www.giraff.org/.
Gonz´alez-Jim´enez, J., Galindo, C., and Ruiz-Sarmiento,
J. R. (2012). Technical improvements of the giraff
telepresence robot based on users evaluation. In 2012
IEEE RO-MAN: The 21st IEEE International Sympo-
sium on Robot and Human Interactive Communica-
tion.
Hart, P., Nilsson, N., and Raphael, B. (1968). A formal basis
for the heuristic determination of minimum cost paths.
Systems Science and Cybernetics, IEEE Transactions
on, 4(2):100 –107.
Hokuyo (2013). Hokuyo homepage. http://www.hokuyo-
aut.jp.
Hunkeler, U., Truong, H. L., and Stanford-Clark, A. (2008).
Mqtt-s - a publish/subscribe protocol for wireless sen-
sor networks. In COMSWARE, pages 791–798. IEEE.
Mapir (2013). Mapir homepage. http://mapir.isa.uma.es.
MRPT (2013). The Mobile Robotic Programming Toolkit
(MRPT) homepage. http://www.mrpt.org.
Newman, P. M. (2003). Moos - a mission oriented operat-
ing suite. Technical Report OE2003-07, MIT Dept. of
Ocean Engineering.
Tsui, K. M., Von Rump, S., Ishiguro, H., Takayama, L., and
Vicars, P. N. (2012). Robots in the loop: telepresence
robots in everyday life. In Proceedings of the sev-
enth annual ACM/IEEE international conference on
Human-Robot Interaction, HRI ’12, pages 317–318,
New York, NY, USA. ACM.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
328
