
A Parity-based Error Control Method for Distributed Compressive
Video Sensing
Shou-ning Chen, Bao-yu Zheng and Liang Zhou
Institute of Signal Processing and Transmission, Nanjing University of Posts and Telecommunications,
Gulou Xin Mo Fan Road 66#, mailbox 214#, Nanjing, China
Keywords: Distributed Compressive Video Sensing (DCVS), Distributed Video Coding (DVC), Compressive Sensing
(CS), Parity-based Error Control (PEC).
Abstract: A novel framework called distributed compressive video sensing (DCVS), combining distributed video
coding (DVC) and compressive sensing (CS), directly capture the raw video data as measurements with
low-complexity and low-cost process. It meets the requirements of distributed system very well, because of
its resource consumption shifting from encoder to decoder. Nevertheless, the issue of measurements
transmission in bit error channel has not been considered yet in the previous work of DCVS. This paper
improved the existing DCVS codec scheme by adding the quantization and inverse quantization process,
and proposed a parity-based error control (PEC) method. This method is simple enough, and has high
coding efficiency. The proposed method is shown to increase video recovery quality greatly under binary
symmetric channel.
1 INTRODUCTION
In the framework of Wireless Media Sensor
Network (WMSN) (Akyildiz et al., 2007), the sensor
nodes must work under some resource constraints,
such as lower computational capability and limited
energy supply, so the problem of how to process the
considerable video information efficiently has been
brought into attention.
Compared with traditional compression standard
like H.264/MPEG, distributed video coding (DVC)
(Girod et al., 2005), which is developed from the
principle of distributed source coding (DSC) (Wyner
et al., 1976), was proposed to reduce the encoding
complexity via shifting the complicated motion
estimation work as the major encoding cost to
decoder.
Another popular theory, compressive sensing
(CS) (Candès and Wakin, 2008) also can shift the
encoder burden to decoder, which has the similar
structure to DVC. The CS theory, which combined
sampling with compression, captures the abundant
raw image information efficiently with a small
amount of incoherent measurements at encoder, and
recovers the image faithfully via linear programming
at decoder. CS is particularly fit for the distributed
systems because of the significant cost reduction of
data acquisition.
Motivated by the common principle of the two
aforementioned theories, the framework of
distributed compressive video sensing (DCVS)
(Kang et al., 2009);
(Do et al., 2009) was proposed.
However, the previous researches just focus on the
codec scheme without much concerning about
compressed signal transmission problem. Based on
the CS theory, the structure of compressed signal,
which is composed of some incoherent
measurements, differs a lot from the conventional
source coding signal which is represented by the
signal coefficients in frequency domain. Therefore,
the transmission problem of CS signal in DCVS
deserves our attention. There already has been some
research on quantization of CS signal (Dai et al.,
2009). And measurements rate allocation for DCVS
(Chen et al., 2010) was also proposed to enhance the
recovered video quality. Moreover, we also do some
work on video quality evaluation for DCVS (Chen et
al., 2012). Main work in this paper is displayed as
follows: 1, provided a suitable quantization for
measurements of DCVS; 2, proposed a parity-based
error control method for DCVS; 3, employed the
proposed method for quantized measurements to
alleviate the affect of binary symmetric channel.
The organization of this paper proceeds as
105
Chen S., Zheng B. and Zhou L..
A Parity-based Error Control Method for Distributed Compressive Video Sensing.
DOI: 10.5220/0004495901050110
In Proceedings of the 10th International Conference on Signal Processing and Multimedia Applications and 10th International Conference on Wireless
Information Networks and Systems (SIGMAP-2013), pages 105-110
ISBN: 978-989-8565-74-7
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

follows. Section 2 gives the basic aspects of DVC
and CS, section 3 describes the specific example of
DCVS and proposed parity-based error control (PEC)
method for DCVS, section 4 discusses the
simulation results and section 5 is the conclusion
and future directions of research.
2 RELATIVE WORKS
2.1 Distributed Video Coding (DVC)
In distributed source coding (DSC), assumed that W
and S are two statistically dependent discrete
signals, which are encoded independently but
decoded jointly. Slepian-Wolf theorem (Wyner et al.,
1976) asserted the achievable rate region for lossless
coding is defined by Rw≥H(W/S), Rs≥H(S/W), and
Rw+Rs≥H(W,S), where Rw and Rs are the encoding
rates for W and S, respectively, H(W/S) and H(S/W)
are the conditional entropy of W and S, respectively,
and H(W,S) is the joint entropy of W and S.
Additionally, S is known as the side information (SI)
of W.
In distributed video coding (DVC) (Girod et al.,
2005), the kinds of frames in a group of pictures
(GOP) are divided into Key frame and WZ frame
(Wyner-Ziv frame). The Key frames are intra-coded
an intra-decoded like I-frame in conventional video
compression standards. And some information
derived from Key frame is viewed as side
information (SI) at decoding end. At encoder,
without motion estimation, the compression of WZ
frame is achieved as parity bits (also called Wyner-
Ziv bits) by channel-encoding like turbo coding or
LDPC coding. Decoder receives the parity bits of
WZ frame viewed as W, and uses the SI S viewed as
noisy version of W to perform channel decoding for
reconstruction of WZ frame.
2.2 Compressive Sensing (CS)
In recent years, compressive sensing (CS) (Donoho,
2006); (Candès, 2006); (Candès and Tao, 2006)
provides a theory about broadband analog signals
sampling. The CS as a new research focus gives a
novel set of theoretical framework about signal
representation, signal sampling and signal
reconstruction. It points out that, if the signal x is
sparse in time domain or sparse in some transform
basis Ψ, then we can employ global measurement
instead of local sampling with sampling speed far
below the Nyquist frequency, get measurements y
less than original sampling number through the
measurement matrix Φ which is not coherent with
sparse transform basis Ψ. After that, original high-
dimensional signal x can be
recovered accurately
with appropriate reconstruction algorithm from low-
dimensional measurements y. Unlike Nyquist
sampling theory, the sampling rate is not dependent
on bandwidth of signal,
but on two basic criteria:
sparsity and the restricted isometry property (RIP)
(Candès and Tao, 2006). Theoretical framework of
compressive sampling is shown in Figure 1.
ˆ
x
Figure 1: Compressive sampling framework.
CS contains the following four steps based on the
study of theory, shown as Figure 1.
Assume that the original N-dimensional signal
can be sparse on the basis Ψ (N×N), then get the
sparse signal θ. If the original signal is sparse
already, skip this step.
x
Ψ
(1)
Devise the measurement matrix Φ (M×N) to
acquire measurements y, where A=ΨΦ called the
sensing matrix.
yx
ΦΦΨ
A
(2)
Solve the problem of minimum l
0
norm as
follows known Φ, Ψ and y, and reconstruct θ
from measurements y.
0
ˆ
arg min || || s.t. =y
A
(3)
Obtain the original signal
ˆ
x
using the inverse
transform of basis
Ψ.
ˆ
ˆ
x
Ψ
(4)
Sparsity, measurement matrix and reconstruction
algorithm in the above steps are three key parts of
CS theory.
Sparse signal in compressive sampling is defined
as follows: if a signal only has finite number of non-
zero sample point (the number is K), and other
sample point is zero or similar to zero, this signal is
claimed as K-sparse and the sparsity is K. Ref
(Baraniuk, 2007) shows that the original signal may
be reconstructed accurately in large probability
under the condition that the relation between
measurements M and sparsity K should satisfies
M≥K·log(N), in other words, the signal recovery
quality will be affected quitely if the measurements
M is less than a certain number.
SIGMAP2013-InternationalConferenceonSignalProcessingandMultimediaApplications
106

According to the above characteristics of
compressive sensing, it has following advantages for
video transmission: (1) The correlation of adjacent
signal sampling points obtained by traditional
method is robust, on the contrary, the redundancy of
measurements observed by CS is in a very low state,
it is in favor of large amount of data information
processing like video transmission to avoid the
waste of a lot of redundant information (Barakat et
al., 2008); (2) The CS is suitable for distributed or
portable terminal video transmission particularly due
to resource consumption of computing and storage
transferred from sender to receiver; (3) Because CS
signal is unstructured presentation of image, and
reconstruction algorithms leave far from the
statistical radio channel interference constraints, so it
possesses good characteristics of resistance to
random channel errors.
3 IMPROVED DCVS SCHEME
AND PROPOSED PEC
METHOD
3.1 DCVS Codec Scheme
In the Kang’s DCVS codec scheme (Kang et al.,
2009) shown in Figure 2, a video sequence consists
of several GOPs, where GOP consists of a key frame
and some followed CS frames. At the encoder, each
frame x
t
, including Key frame and CS frame, is
compressed via CS measurement process as:
tt
yx
(5)
where y
t
is the measurement vector with size M
t
, and
Φ is the scrambled block Hadamard ensemble
(SBHE) matrix described in (Do et al., 2008). The
sparse basis matrix
Ψ used in the scheme is DWT.
The significant difference between Key frame and
CS frame is that the measurement vector size M
t
of
Key frame should be larger than that of CS frame, to
guarantee the recovery video quality at decoder. The
measurement rate for each frame can be defined as:
/
tt
M
RMN
(6)
where N is the size of video frame.
At the decoder, each Key frame x
t
is
reconstructed via Gradient projection for sparse
reconstruction algorithm (GPSR) (Figueiredo et al.,
2007), which solve the convex unconstrained
optimization problem described as:
2
21
1
min || || || ||
2
t
tt
yA
t
(7)
where y
t
is a vector with size M
t
, y
t
=Φx
t
, A= ΦΨ is
a M
t
×N matrix, and
is a non-negative parameter.
GPSR is essentially a gradient projection algorithm
applied to a quadratic programming formulation of
Eq.(7), in which the search path for each iteration is
acquired by projecting the negative-gradient
direction onto the feasible set, and the default initial
solution for θ
t
is a zero vector.
Before reconstructing a CS frame x
t
, the decoder
will generate its SI S
t
by motion-compensated
interpolation from the reconstructed neighboring
Key frames first, which can be viewed as a noisy
version of x
t
. In the same scene, the successive
frames should have a certain similarity. Hence, the
SI derived from the neighboring Key frame, should
be similar to this CS frame. So, each CS frame is
reconstructed via the modified GPSR with the initial
solution set by SI. To get a good quality for CS
frame, it is required to have a good initialization
derived from Key frame which is served as reference
frame. That is why the measurement vector size M
t
of Key frame should be much larger than that of CS
frame.
3.2 Quantization for Measurements
The measurements of DCVS frame is discrete in
time but continuous in amplitude. Hence, the
quantization is the indispensable part of codec
scheme. In order to improve the above-mentioned
DCVS codec scheme, the uniform quantization and
inverse quantization are added to the system for
digital transmission. Scale quantization is employed
on account of complexity of encoder. Quantizing
process is described as:
1
1
round(2 )
2
Q
Q
t
t
y
z
(8)
where y
t
is the measurements vector of a frame, z
t
is
the quantized measurements vector, Q bits refers to
the number of bits per measurement, also implies the
quantitative accuracy, and 2
-(Q-1)
refers to
quantization step. Define the quantization noise as:
tt
ez y
(9)
In addition, we need one bit to represent the sign of
measurement. Then we can get the number of bits
ratio per frame of DCVS, shown as:
(1)
tt
RQ MRN
(10)
AParity-basedErrorControlMethodforDistributedCompressiveVideoSensing
107

Figure 2: DCVS codec scheme.
where R
t
is the number of bits ratio per frame, MRt
is
the measurement rate for each frame, and N is the
size of a frame.
Currently, we only know the value of Q is just
the trade-off between reconstructed video quality
and compression ratio, and how to quantize the
measurements more efficiently, which will be left
for our future work.
3.3 PEC Method for DCVS
The dequantized measurements y
t
constitute a
random and incoherent combination of the original
frame pixel, which has been already studied in
(Chen et al., 2012). That is also to say, no individual
measurement is more important than any other
measurement for frame reconstruction. This means
that, the number of correctly received measurements
is the main factor in determining the quality of video
recovery. For this characteristic of measurements,
discarding a small amount of measurement will not
cause quality decline greatly, which will be shown in
next section. There will be badly impact on quality if
the measurements containing some error bit are used
for the reconstruction.
With the limitation of channel resource and
energy constraint, traditional ARQ (Automatic
Repeat re-Quest) error control scheme can’t be
adopted. And other FEC (Forward Error Correction)
methods such as LDPC, Turbo coding are also
inapplicable to the DCVS due to the additional
encoding complexity, even though the FEC scheme
shows stronger error correction capabilities. For the
above reasons, we proposed a simple parity-based
error control (PEC) method for resistance of random
channel error in DCVS. It is realized by using an
even parity bit added after each measurement at
encoder. If the parity check is failed, than dropped
this measurement immediately at receiver or at an
intermediate node. This method has the following
two benefits: 1, it is simple enough to adapt to the
requirements in the codec; 2, parity-based coding
efficiency is high extremely with low coding
redundancy. The coding efficiency of a frame can be
defined as:
(1)
(1)
t
tt
QMRN
P
QMRNMRN
(11)
where MR
t
×N presents the number of parity bits.
Improved DCVS system is shown in Figure 3.
4 SIMULATIONS RESULTS
In this paper, we choose the ‘coastguard’ CIF video
sequence with frame size 352×288as the test video,
and GOP size is set to 3. The MR
t
of Key frame
equals to 70%, and MR
t
of CS is 30%. In the CS
measurement process, SBHE matrix is used as
sensing matrix
Φ, and DWT is employed as sparse
basis matrix
Ψ. GPSR algorithm is used for video
reconstruction at decoder. Quantitative accuracy Q is
set to 8 bit. Random channel error is simulated by
Binary Symmetric Channel (BSC). Ultimately, we
choose conventional Peak Signal to Noise Ratio
(PSNR) to evaluate the quality of recovery video.
Figure 4 shows the first Key frame of video
sequence in DCVS. (a) is the original frame, (b) is
the recovery frame without channel error. (c) is the
recovery frame which employ our PEC method
under channel bit error rate (BER) 10
-2
. (d) is the
recovery frame without any error control method
under BER 10
-2
.
We pick up 1-7 frames in the video sequence to
present the video reconstruction quality under
channel BER 10
-2
,10
-3
,10
-4
, and the ideal channel
without error, which is shown in Figure 5 and Figure
6. 1st, 4th, 7th frame are Key frames and 2nd, 3rd,
5th, 6th frame are CS frames. Figure 5 shows the
quality with our proposed method, and Figure 6
shows the quality without error control. Figure 7
shows PSNR of recovery the 4th frame which is Key
SIGMAP2013-InternationalConferenceonSignalProcessingandMultimediaApplications
108

Figure 3: Improved DCVS codec scheme.
Figure 4: 1st Key frame of test video sequence: (a) original frame; (b) the recovery frame without channel error; (c) the
recovery frame under 10
-2
BER with our PEC method; (d) the recovery frame under 10
-2
BER without any error control
method.
frame under the different BER and Figure 8 shows
PSNR of recovery the 3rd frame which is CS frame
under the different BER. For all reasonable BER,
our proposed method achieved the better
performance. Figure 9 shows that under different
BER, the true measurement ratio of Key frame and
CS frame in fact are received at decoder end.
5 CONCLUSIONS AND FUTURE
WORKS
Nowadays compressive sensing is on its growing
stage and we still have long way to go before putting
it into practice. How to convert analog information
into digital compressive information (Analog-
Information Converter) by the method of
compressive sensing is a tough issue. But
compressive sensing system has already been proved
to be feasible technically, and we firmly believe that
it shall be another important way for information
acquisition in the near future. In this paper, we
described a whole framework of DCVS, proposed a
parity-based error control method for CS
measurement of DCVS frame. Its good performance
has been shown in simulation results. Next, in
DCVS, we will focus on the measurement
quantization and entropy coding, alterable
measurement rate allocation, and video recovery
quality evaluation. These also attracted a lot of
attentions of many researchers in this field.
Figure 5: Recovery quality of 1st-7th frame in test video
under different BER with our PEC method.
Figure 6: Recovery quality of 1st-7th frame in test video
under different BER without error control method.
AParity-basedErrorControlMethodforDistributedCompressiveVideoSensing
109
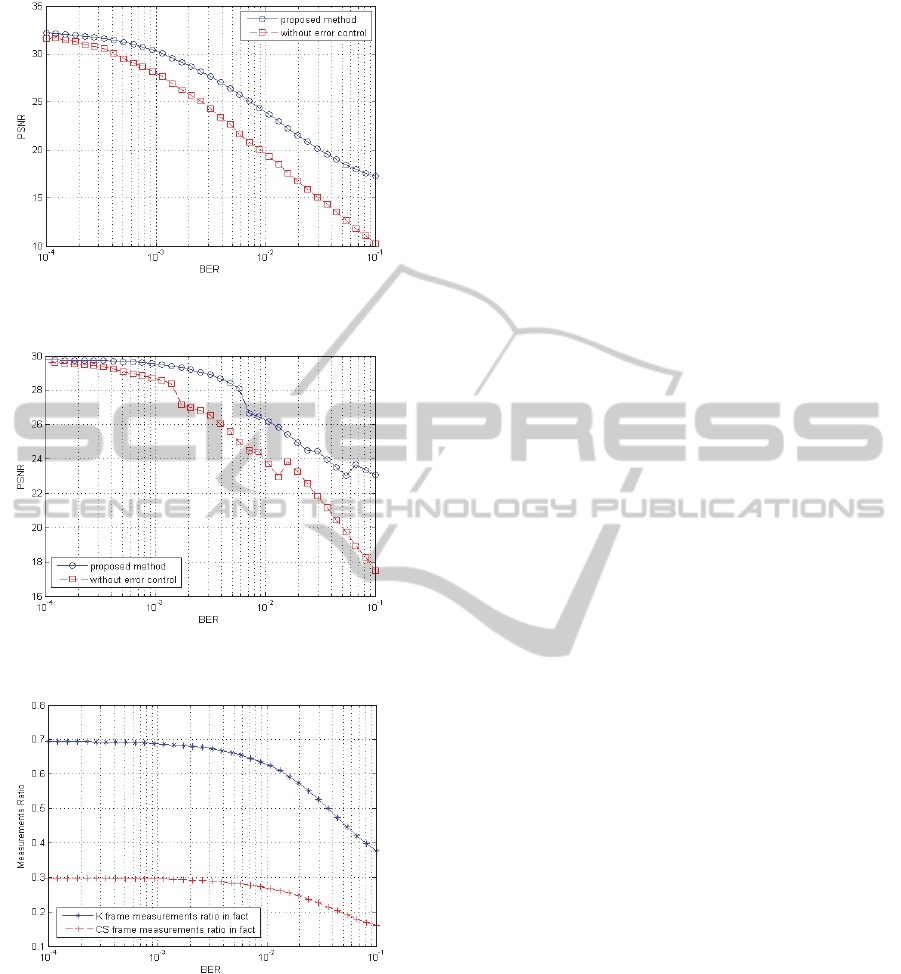
Figure 7: PSNR of recovery the 4th frame (Key frame)
under the different BER.
Figure 8: PSNR of recovery the 3rd frame (CS frame)
under the different BER.
Figure 9: the true measurement ratio of Key frame and CS
frame in fact under different BER.
REFERENCES
Akyildiz, I. F., Melodia, T., & Chowdhury, K. R. (2007).
A survey on wireless multimedia sensor networks.
Computer networks, 51(4), 921-960.
Barakat, W., Saliba, R., & Evans, B. L. (2008).
Compressive Sensing for Multimedia
Communications in Wireless Sensor Networks.
Baraniuk, R. G. (2007). Compressive sensing [lecture
notes]. Signal Processing Magazine, IEEE, 24(4),
118-121.
Candès, E. J., & Wakin, M. B. (2008). An introduction to
compressive sampling. Signal Processing Magazine,
IEEE, 25(2), 21-30.
Candès, E. J. (2006). Compressive sampling. In
Proceedings of the International Congress of
Mathematicians: Madrid, August 22-30, 2006: invited
lectures (pp. 1433-1452).
Candès, E. J., & Tao, T. (2006). Near-optimal signal
recovery from random projections: Universal encoding
strategies?. Information Theory, IEEE Transactions on,
52(12), 5406-5425.
Chen, H. W., Kang, L. W., & Lu, C. S. (2010, July).
Dynamic measurement rate allocation for distributed
compressive video sensing. In Visual Communications
and Image Processing 2010 (pp. 77440I-77440I).
International Society for Optics and Photonics.
Chen, S., Zheng, B., & Li, J. (2012). A method of image
quality assessment for compressive sampling video
transmission. Journal of Electronics (China), 29(6),
598-603.
Dai, W., Pham, H. V., & Milenkovic, O. (2009).
Quantized compressive sensing. arXiv preprint
arXiv:0901.0749.
Do, T. T., Chen, Y., Nguyen, D. T., Nguyen, N., Gan, L.,
& Tran, T. D. (2009, November). Distributed
compressed video sensing. In Image Processing
(ICIP), 2009 16th IEEE International Conference on
(pp. 1393-1396). IEEE.
Do, T. T., Tran, T. D., & Gan, L. (2008, March). Fast
compressive sampling with structurally random
matrices. In Acoustics, Speech and Signal Processing,
2008. ICASSP 2008. IEEE International Conference
on (pp. 3369-3372). IEEE.
Donoho, D. L. (2006). Compressed sensing. Information
Theory, IEEE Transactions on, 52(4), 1289-1306.
Figueiredo, M. A., Nowak, R. D., & Wright, S. J. (2007).
Gradient projection for sparse reconstruction:
Application to compressed sensing and other inverse
problems. Selected Topics in Signal Processing, IEEE
Journal of, 1(4), 586-597.
Girod, B., Aaron, A. M., Rane, S., & Rebollo-Monedero,
D. (2005). Distributed video coding. Proceedings of
the IEEE, 93(1), 71-83.
Kang, L. W., & Lu, C. S. (2009, April). Distributed
compressive video sensing. In Acoustics, Speech and
Signal Processing, 2009. ICASSP 2009. IEEE
International Conference on (pp. 1169-1172). IEEE.
Wyner, A., & Ziv, J. (1976). The rate-distortion function
for source coding with side information at the decoder.
Information Theory, IEEE Transactions on, 22(1), 1-
10.
SIGMAP2013-InternationalConferenceonSignalProcessingandMultimediaApplications
110
