
PRONTOE
A Case Study for Developing Ontologies for Operations
Scott Bell
1
, Pete Bonasso
1
, Mark Boddy
2
, David Kortenkamp
1
and Debra Schreckenghost
1
1
TRACLabs Inc., Houston, TX, U.S.A.
2
Adventium Labs, Minneapolis, MN, U.S.A.
Keywords:
Ontology, Operations, Space, Procedures, Planning, Robotics.
Abstract:
In this paper, we describe a set of software tools called the PRIDE ONTOlogy Editor (PRONTOE) and a
methodology that allows system operators and domain experts to build and maintain ontologies of their sys-
tems with no explicit understanding of the underlying ontology representation. We present two case studies:
one using NASA flight controllers, and another using the DARPA Robotic Challenge.
1 MOTIVATION
Ontologies provide a structural framework for sys-
tem knowledge that is useful for many applications.
One particular application is to provide the knowl-
edge necessary for software tools that assist operators
in monitoring and controlling complex and dynamic
systems. Using an ontology to model system infor-
mation has advantages. The ontology models provide
monitoring and control concepts as objects that can be
used in multiple control domains. These models de-
fine properties that can be used to automatically pop-
ulate object data fields and derive relations between
objects to improve search of system information.
The representational power of ontologies, how-
ever, introduces a number of challenges. One such
challenge is developing and using ontologies for op-
erations that the operators and other domain experts
do not have any experience in developing or main-
taining ontologies of their systems. Using ontology
experts to build and maintain these ontologies is pro-
hibitively expensive, especially because the knowl-
edge necessary to build the ontologies exists in a vari-
ety of documents and in the operator’s or domain ex-
pert’s heads. Another challenge is that the states and
configurations of the specific objects in the domain
are both voluminous and dynamic, making manual
entry and maintenance prohibitive. A final challenge
is that the data required, especially state updates, need
to be extracted or imported from other disparate sys-
tems. In this paper, we describe a set of software tools
called the PRIDE ONTOlogy Editor (PRONTOE) and
a methodology that allows system operators and do-
main experts to build and maintain ontologies of their
systems with no explicit understanding of the under-
lying ontology representation.
PRONTOE consists of a graphical editing tool that
allows users to define and edit objects and their prop-
erties and relationships and to view those properties
and relationships in a variety of ways and in the con-
text of their particular domain. PRONTOE supports
the integration of different ontology kernels that di-
vide complex systems into interacting components.
PRONTOE includes reasoners for assisting in object
definition and consistency. PRONTOE has software
tools for importing (and exporting) data to domain-
specific databases. PRONTOE also allows for view-
ing real-time system data in the context of defined
objects and their relationships. PRONTOE is being
evaluated in two domains. The first is operation of
the International Space Station (ISS) by NASA flight
controllers. In this case study, the domain experts are
the flight controllers who have engineering degrees
and years of experience in operating ISS. The ontol-
ogy is used by software tools such as task planners,
procedure editing and execution systems, and diag-
nosis systems. The second domain is a humanoid
robot being developed by DARPA for disaster relief
operations. In this case study, the domain experts are
robotics engineers. The ontology is used to develop
operator interfaces for using robot capabilities as well
as robot scripts for automating common activities.
17
Bell S., Bonasso P., Boddy M., Kortenkamp D. and Schreckenghost D..
PRONTOE - A Case Study for Developing Ontologies for Operations.
DOI: 10.5220/0004520500170025
In Proceedings of the International Conference on Knowledge Engineering and Ontology Development (KEOD-2013), pages 17-25
ISBN: 978-989-8565-81-5
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

2 APPROACH
Our approach consists of several interacting compo-
nents. At the core of PRONTOE is a graphical user
interface (GUI) that allows an operator to visually in-
spect and edit an OWL ontology. The ontology itself
is divided into a set of kernels that correspond to the
different operational aspects of the system. The ker-
nel approach makes it easier for an operator to focus
on the specifics of their system and not the require-
ments of the underlying ontology. OWL reasoners
provide consistency and fill in required ontology in-
formation automatically.
2.1 Graphical User Interface
The PRONTOE Graphical User Interface (GUI) can
be used to inspect a system ontology, search for spe-
cific system information in that ontology, modify in-
formation already in the ontology, and add new in-
formation to the ontology. The PRONTOE GUI is
an Eclipse based Rich Client Platform (RCP) applica-
tion. Developing PRONTOE as an RCP application
allowed us to use a variety well developed libraries
for both Java and Eclipse. For ontology data manip-
ulation and reasoner interaction, we used the OWL-
API Java library. To render the ontology graph, the
Eclipse Zest Toolkit was used. For rendering system
schematics, we used the Batik SVG library. Other li-
braries include integration with version control, work-
flows, and user authentication.
The RCP approach also allows us to easily add or
remove features for different domains. For example,
the space domains have different schematics, bundled
ontologies, and editing widgets than the robot do-
main. By specifying these differences in a product
definition, we can simultaneously release PRONTOE
for different domains for multiple platforms. We also
provide extension points into PRONTOE to help other
developers create new domain specific features.
PRONTOE’s editing environment is divided into
several different editing panes. Figure 1 shows a typ-
ical environment. The left window shows the current
open ontology along with available ontologies to edit.
This particular project has been checked out using the
Subversion plugin, so the user can right click to add,
commit, or update the ontology from version control
within the PRONTOE application.
The central pane is a graph of a selection of the
ontology. The graph shows class and subclass rela-
tionships. At the individual level, object properties
are displayed with the property name labeled on the
edge. Nodes can by right clicked on to expand or
collapse their children. Double clicking on a node
opens it for editing its name, object properties, and
data properties.
The lower right hand pane is a schematic of the
physical layout of the system represented by the on-
tology rendered as an SVG. The different colors in the
schematic show the locations of the class and individ-
uals shown in the center graph. Clicking on an area in
the schematic will show all the classes and individuals
associated with that location. Different SVGs may be
used for different domains by creating a PRONTOE
plugin. Figure 1 shows an SVG of the International
Space Station (ISS).
The upper right hand pane is a tree showing the
ontology’s subclasses and individual. From here,
classes and individuals may be added, edited, deleted,
and reasoned upon. A search bar on the top pro-
vides incremental searching for classes and individual
names.
All the editing panes can be rearranged or even de-
tached according to user preference. The layout of the
windows can be named and saved by the user using
perspectives. These perspectives are available on the
upper right of the PRONTOE window. The user can
rapidly flip through different perspectives depending
on their current work or role. By default, selecting an
item in one pane automatically syncs the information
in the remaining panes to reflect the selection. For ex-
ample, clicking on a class in the ontology tree changes
color the schematic with the locations of all the in-
dividuals under that class, and changes the graph to
display the subclasses and individuals. This synching
feature can be disabled per editing pane by deselect-
ing the sync button in the upper right hand corner of
each editing pane.
2.2 Kernels
For PRONTOE, we divide an overall system ontology
into a base and several kernels. This division serves
several purposes. The first and most fundamental one
is that the base ontology forms an intermediate model
that the users are not allowed to modify. Users are not
ontology experts, and should not be left to figure out
how to model the domain. The base provides a set of
generic classes for things like resources, or locations,
along with some deductive machinery for maintain-
ing consistency in the description of the world state in
PRONTOE’s database.
The second reason for this separation between the
base and multiple kernels in the ontology is bureau-
cratic, but no less important for that. For example,
NASA’s ISS flight controllers (FCs) have divided but
interacting responsibilities. The FC responsible for
orbital maintenance needs to coordinate with the FC
KEOD2013-InternationalConferenceonKnowledgeEngineeringandOntologyDevelopment
18
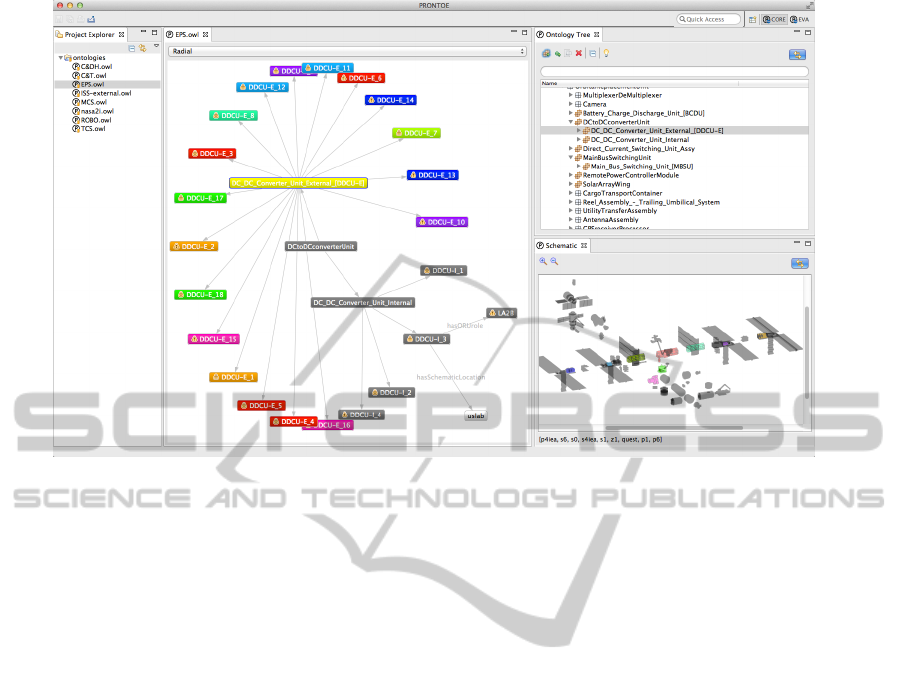
Figure 1: The PRONTOE editing environment.
responsible for power management. Astronaut Extra-
vehicular activities (EVAs) are managed by several
FCs at once. This organizational structure requires
a supporting structure in PRONTOE. One flight con-
trol discipline must have complete control over their
own part of the domain, with visibility into parts of
the domain under the purview of other disciplines.
As a result, PRONTOE’s database has several fea-
tures that complicate maintenance. First, it is subject
to asynchronous access by multiple parties, who may
be making interacting or conflicting changes. Second,
it is deductive: for many changes to the database de-
scribing the world state, there are rules that will fire,
making additional changes. All of these changes need
to be included in the definition of a database transac-
tion that allows us to keep PRONTOE’s database in a
consistent state.
Distributed authority adds more complication, be-
cause the separation between disciplines is only par-
tial. For example, there is a defined relationship be-
tween two different components of the ISS, such as a
pump and the power-channel that energizes it. Dis-
connecting the pump is a change that must be re-
flected in the relations for both the pump and the
power-channel, which may be in different kernels in
the ontology. This requires us to come up with some
way to make the change in one kernel and keep the
database consistent, which requires an unauthorized
change in another kernel.
For now, the solution we have implemented is to
use a version-tracking system. All changes, autho-
rized or not, will be made as required to keep the
database consistent. Changes made in other kernels
will result in the “owners” of those kernels being in-
formed so that they can either approve or reject those
changes. Rejection by any flight discipline will then
result in the entire set of changes being rolled back.
2.3 Reasoners
For editing-time classification, consistency checking,
property inference, and Semantic Web Rule Language
(SWRL) reasoning, we use Pellet. The inferred ax-
ioms are added back to the currently open ontology
allowing the user to save them if they wish. As we
are using OWL-API, it is easy to plug in different rea-
soners (e.g., HermiT) for evaluation. For example, in
the case of the ISS if the operator entered the property
that a certain computer controls a piece of equipment,
then the reasoner will assert a property that the piece
of equipment is controlled by that computer. This re-
duces the burden on the operator of having to spec-
ify completely the relationships in the ontology when
many of them can be inferred.
3 CASE STUDIES
We have used PRONTOE to develop ontologies for
two different complex systems. The first system is
the International Space Station (ISS) being operated
by NASA and the Johnson Space Center in Hous-
ton Texas. The second system is the Atlas humanoid
PRONTOE-ACaseStudyforDevelopingOntologiesforOperations
19

robot being developed by the Defense Advanced Re-
search Projects Agency (DARPA). In this section, we
describe these two case studies and how we used
PRONTOE to simplify ontology development and
maintenance.
3.1 International Space Station
Our principle development activity for PRONTOE is
an ontology for the International Space Station (ISS).
We have worked for the past two years with NASA
flight controllers to develop and design an ontology
that partially models the ISS. The focus of the effort
is on planning for Extravehicular Activities (EVA),
basically space walks, so our ontological concentra-
tion is on ISS objects that are located on the outside
(or external to) ISS, such as power module and anten-
nas. PRONTOE, as mentioned in section 2.2, comes
with a base ontology, a domain base we call ISS-base,
and kernel extensions for EVA and for each flight dis-
cipline that supports a given EVA, such as electrical
power and motion-control systems. The users can
then use PRONTOE to extend these kernels, incre-
mentally as new ISS activities arise. To prepare for
an upcoming EVA, the flight controllers start with a
current configuration of the ontology, and use PRON-
TOE to develop and save a snapshot of the configu-
ration of equipment, power and control that is antici-
pated to be true at the time of the activity. In an exten-
sion to PRONTOE, we are developing a capability to
generate change forms concerning location and con-
figuration changes that resulted from the EVA to be
distributed to other ISS parties such as mass proper-
ties analysis teams and ISS guidance and navigation
teams.
We have developed interfaces that allow PRON-
TOE to automatically import from two large NASA
databases of ISS equipment: the External Configura-
tion Analysis and Tracking Tool (ExCATT) and the
Inventory Management System (IMS). The ontolo-
gies created by these systems are large, with 4855
axioms containing 283 classes and 897 individuals.
We have thus broken the ontology into kernels to ease
editing. By connecting to existing databases, we re-
duce the upfront editing time necessary to build the
ontology. We can also export to these databases,
so any changes that operators make using PRON-
TOE can be pushed back into the official databases
of record.
The end goal of PRONTOE is to have operators
add equipment to the ontology. As an example of edit-
ing in PRONTOE, we will walk through a user adding
a new type of gas tank assembly for the ISS. The ex-
isting gas tank assemblies are show in Figure 2 by se-
lecting the GasTankAssemblies class in the ontology
tree. The classes are all colored to mark their differ-
ent locations on ISS. The user will create a new class
by clicking on the “Add Class” button in the ontology
tree toolbar. The resultant dialog is show in Figure 3.
Inherited object and data properties that can be bound
are show in cyan. New properties for the class can
be added by clicking the appropriate plus button. In
this case, the user wanted to create a new class called
OxygenTankAssembly. Clicking OK on the dialog
creates the appropriate axioms and marks the ontol-
ogy as dirty. In Figure 4, the user is in the process of
creating and specifying a new individual of Oxygen-
TankAssembly. Object properties are specified in the
top table and data properties specified in the bottom
table. If object or data property hasn’t been specified,
we mark the field yellow.
The first user trials of PRONTOE involved EVA
flight controllers, and to a lesser extent the robotics
flight controllers (known as ROBOs). The EVA flight
controllers generally approved of our current develop-
ment, but asked if we might build a tighter interface
to the 3D graphics engine they use known as DOUG
(Dynamic Onboard Ubiquitous Graphics). But they
also indicated that knowledge of how EVA serviced
equipment was related to the information in the oth-
ers kernels, e.g., power and computer control, would
be useful to them for setting up preconditions on their
EVA tasks. Our ROBO flight controller was skeptical
that the ROBO team would use PRONTOE for proce-
dures, but she saw a number of potential uses for the
tool, such as providing support for operational plan-
ning meetings, for collaboration among disciplines,
for troubleshooting training, and for use in simulation
scripting meetings.
Later in the project, we demonstrated our cur-
rent version of PRONTOE to core systems flight con-
trollers. They all were impressed with how we had
pulled together data from disparate sources into one
integrated view and suggested that we have a series
of one-on-one knowledge engineering meetings with
each of them to see if our kernels had enough key con-
cepts modeled for the users to extend them without
our help. We began those sessions with the vehicle
motion control flight controller who spent an after-
noon with us investigating the ontology and pointing
out what was missing if he were to use it in his day-to-
day operations. The resulting additions included be-
ing able to model internal items that connect to exter-
nal items, allowing multiple remote power controller
modules (RPCMs) in our power channel models, and
adding computer control channels to augment our re-
lations, controllerFor and controlledBy.
KEOD2013-InternationalConferenceonKnowledgeEngineeringandOntologyDevelopment
20
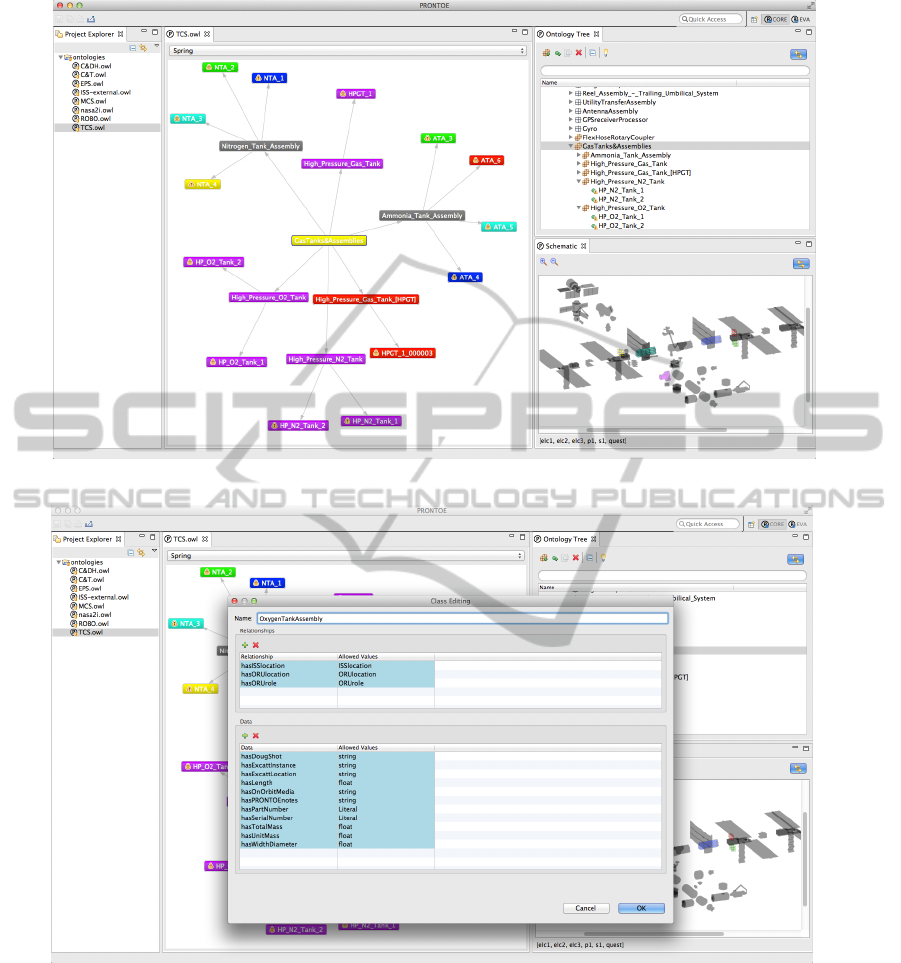
Figure 2: The gas tank assemblies on ISS.
Figure 3: Adding a new class called OxygenTankAssembly to the ontology.
3.2 DARPA Atlas
In addition to using PRONTOE for space systems, we
have also been developing ontologies in the robot do-
main. TRACLabs is developing automation and con-
trol software for the simulated Atlas robot used for the
DARPA Virtual Robotic Challenge (VRC). We have
defined an ontology of robot affordances of the At-
las robot to improve user understanding of the capa-
bilities of a robot. These affordances define the per-
ceived and actual capabilities of the robot based on
Norman’s definition of affordances (Norman, 1998).
This robot-centric ontology can be used to ground
human-robot interaction about what the robot can
know about itself and its environment based on what
it can sense, and what the robot can do based on en-
coded behaviors. The ontology of robot affordances
models the capabilities of a robot as Behaviors to
change the robot’s Stance. A Stance is a meaning-
ful configuration of a robot’s components and/or sys-
PRONTOE-ACaseStudyforDevelopingOntologiesforOperations
21

Figure 4: Adding a new instance of OxygenTankAssembly.
tems. For example, sit is a Behavior of a bipedal robot
that produces the Stance of sitting. A Behavior is ac-
complished by executing command sequences mod-
eled as CommandLists. Each Command in the Com-
mandList is associated with a BodyPart of the robot.
The execution of a Command changes the State of
the robot defined for components associated with that
BodyPart. This ordered sequence of transient States
is captured in a StateList. For example, a sequence
of Move Commands in a Motion Behavior produces
a corresponding sequence of Pose States that change
the JointStates associated with the Command. The
end state resulting from the execution of a Comman-
dList is a Posture Stance. Figure 5, summarizes the
key concepts in the ontology of robot affordances and
the properties relating these concepts.
As shown in Figure 6, we use the PRONTOE on-
tology editor to visualize and inspect this ontology of
robot affordances for Atlas. We automatically gen-
erate an ontology from the Unified Robot Description
Format (URDF), which is an XML standard for repre-
senting a robot model. A schematic of the Atlas robot
illustrates the robot components in the ontology, such
as Joints and BodyParts. The user interacts with this
schematic to identify concepts corresponding a par-
ticular component. For example, the user can search
the ontology for all Behavior instances defined for the
Atlas robot. We are currently investigating the use of
the ontology of robot affordances to build operator in-
terfaces to the robot.
4 APPLICATIONS
The ontology developed in PRONTOE is not an end in
itself. It is designed to support a set of core autonomy
capabilities. For example, we are able to translate the
OWL ontology into a planning language called Plan-
ning Domain Description Language (PDDL) (Fox
and Long, 2003). We then have a task planning tool,
called AP (Elsaesser and Sanborn, 1990), that can
read in PDDL and use those models to schedule tasks
that need to be performed. For example, let’s take the
overall task of replacing one of the ISS power mod-
ules. This requires subtasks of shutting down certain
systems that are on that power module. The ontology
describes the connectivity between the power mod-
ules and various subsystems. However, that is not
enough information for the planner. For example, the
internal thermal control system (ITCS) of the US Lab
on the ISS. The ITCS is controlled by ISS computers
S01 for primary control and S11 for backup control
for a power pump of Loop A (the low temperature
loop) of an external thermal control system (ETCS).
Basically, the pump moves heat from inside of the
ISS to outside of the ISS. Similarly, Loop B performs
the same function for the medium temperature loop.
When the ISS power module is shut down, backup
computers must be brought up to run it. Also, Loop
A needs to be brought down completely. With the
loss of Loop A, the low temperature loop in the lab
won’t function properly, so the lab ITCS needs to be
reconfigured to single loop mode. In this mode, the
KEOD2013-InternationalConferenceonKnowledgeEngineeringandOntologyDevelopment
22

Figure 5: Key concepts and properties in the ontology of robot affordances.
Figure 6: The Atlas ontology created from a URDF.
three-way valves are set so that all the water passes
through the medium temperature heat exchanger that
is serviced by Loop B.
In our ontology we model relationships of the var-
ious power and computer units to the thermal control
objects. The ontology is translated into PDDL and
read into the planner as the initial situation and a plan
is generated. When AP generates a plan to remove
and replace power module, if the lab ITCS is in single
loop mode, no lab ITCS action must be taken. But
when the ITCS is in dual loop, the necessary addi-
tional computer and power actions are added to the
plan to have the water pass through the medium tem-
perature heat exchanger. Without an up-to-date on-
tology containing all system connectivity and state,
the automated planner would not be able to generate
appropriate plans and manual intervention would be
necessary.
We are also using PRONTOE for editing stan-
dard operating procedures for ISS. We have devel-
PRONTOE-ACaseStudyforDevelopingOntologiesforOperations
23

oped a procedure representation language (PRL) (Ko-
rtenkamp et al., 2008), that captures the form of tradi-
tional procedures, but allowing for automatic transla-
tion into code that can be executed by autonomous ex-
ecutives. In order to author PRL, we have developed
the Procedure Integrated Development Environment
(PRIDE) (Izygon et al., 2008). Procedures authored
in PRIDE and output in PRL require knowledge about
the available commands and state of the ISS subsys-
tems (Bell and Kortenkamp, 2011). PRIDE can read
in OWL files and create drag-and-drop interfaces for
system commands and to verify system state. PRON-
TOE makes it easy to edit the OWL files to keep the
data consistent with current ISS operational needs.
For example, if a new piece of equipment is added to
ISS, PRONTOE can assist a flight controller in adding
just enough information to the ontology to quickly
build procedures for the device. If the new device
is faulty, a simple change to the ontology will ren-
der all procedures that dependent on it invalid. In this
way, PRONTOE can act as a verification of proce-
dures with the systems they interact with.
5 RELATED WORK
Ontological engineering (OE) has been a regular ac-
tivity in the AI community for many years. In 1999 it
was considered in its infancy for lack of use of widely
accepted methodologies (Lopez, 1999), but as late as
2007, the majority of OE researchers still did not use
any methodology (Cardoso, 2007). Yet, most OE re-
search accepts as fundamental the need for an effi-
cient, consistent paradigm for knowledge engineering
ontologies (Soares and Fonseca, 2009).
Work on meta-theories, e.g., (Herzig and Varzin-
cak, 2007), may be considered related in that it at-
tempts to view an ontology from a perspective of
common concepts and elements. Myers’ work on
planning domain meta-theories (Myers, 2000) falls in
this vein, where she discusses such things as charac-
terizing air/land/water as “transport media”, and that
movement concepts involve a source and a destina-
tion. Our work on a base ontology as distinct from
kernel ontologies is similar and our interactive ap-
proach will use abstraction levels to make the author-
ing of models easier for the user.
6 FUTURE WORK
In the short term, we plan to add modeling of sys-
tem commands, telemetry, and flight rules. The flight
rules define operational constraints of the underly-
ing system. For example, on ISS an outside light is
physically paired with a heater. A flight rule states
to prevent the light from freezing, the light and the
heater cannot both be off. This simple example can
easily be written using SWRL. By streaming live
data in the ontology, we can check the both the con-
sistency of the ontology and the underlying system
health. For performance reasons, we are investigat-
ing using Tractable reasoning infrastructure for OWL
2 (TrOWL) to perform stream reasoning.
We are also working to allow PRONTOE to ex-
port to two advanced planning languages, ANML and
PDDL. This will allow planners to directly use onto-
logical data to create plans and schedules. This fea-
ture is important to EVAs due to their tight schedules
and complexity of their execution.
We’ve recently added the ability for PRONTOE
to drive the 3D visualizer DOUG. By clicking on any
ontological entity within PRONTOE with a physical
location on ISS, PRONTOE algorithmically directs
DOUG’s camera to an appropriate location to view
the entity and flashes it if possible. We plan to inte-
grate other ISS views and databases into PRONTOE,
further enriching the ISS ontology.
7 CONCLUSIONS
By leveraging domain specific window widgets and
an easy to use development environment, PRONTOE
allows operators and other domain experts to develop
and maintain ontologies. Importing tools and connec-
tions to a wide variety of data sources allows PRON-
TOE to easily capture system data from a wide va-
riety of sources. Kernels, reasoners, and integration
into version controls systems and workflows allows a
user of PRONTOE to maintain large and dynamic on-
tologies. Useful ontologies were built for both NASA
and robotic domains for automation and affordances
respectively. In the future, we plan to add better mod-
eling of system commands and telemetry. All PRON-
TOE domains will benefit from procedure executives
and planners using the developed ontology. Based on
our case study, the benefits for NASA operations by
using PRONTOE are:
• Make available a consistent domain model that
need not be reproduced for each automation ap-
plication;
• Unify the often disparate sources of EVA and
Core ISS System information;
• Provide for rapid update of ISS configuration in-
formation, thus allowing automated services to
provide results based on the most recent data;
KEOD2013-InternationalConferenceonKnowledgeEngineeringandOntologyDevelopment
24

• Provide a consistent view of the domain so as to
minimize error in operating ISS;
• Model a set of core concepts for dynamic system
monitoring and control that have been proved out
in disparate domains such as robotics.
ACKNOWLEDGEMENTS
This work is funded by a NASA Small Business In-
novation Research (SBIR) grant. The authors grateful
to Dr. Jeremy Frank of NASA Ames Research Cen-
ter for his help with this project. The authors also
wish to thank the numerous NASA flight controllers
who have worked with us over the last several years
to get the correct data into our ontology. Kevin Kusy
was instrumental in creating import scripts for exter-
nal databases. The development of an ontology of
robot affordances for the simulated Atlas robot was
funded under a DARPA Phase I Small Business Tech-
nology Transfer (STTR) contract.
REFERENCES
Bell, S. and Kortenkamp, D. (2011). Embedding procedure
assistance into mission control tools. In Proceedings
of the IJCAI Workshop on AI in Space.
Cardoso, J. (2007). The semantic web vision: Where are
we? IEEE Intelligent Systems, 22(5):84–88.
Elsaesser, C. and Sanborn, J. (1990). An architecture for
adversarial planning. IEEE Transactions on Systems,
Man, and Cybernetics, 20(1).
Fox, M. and Long, D. (2003). PDDL2.1: An extension
to PDDL for expressing temporal planning domains.
Journal of Artificial Intelligence Research, 20:61–
124.
Herzig, A. and Varzincak, I. (2007). Metatheory of action:
Beyond consistency. Artificial Intelligence, 171:951–
984.
Izygon, M., Kortenkamp, D., and Molin, A. (2008). A
procedure integrated development environment for fu-
ture spacecraft and habitats. In Proceedings of the
Space Technology and Applications International Fo-
rum (STAIF). Available as American Institute of
Physics Conference Proceedings Volume 969.
Kortenkamp, D., Bonasso, R. P., and Schreckenghost, D.
(2008). A procedure representation language for hu-
man spaceflight operations. In Proceedings of the
International Symposium on Artificial Intelligence,
Robotics and Automation in Space (i-SAIRAS).
Lopez, F. M. (1999). Overview of methodologies for build-
ing ontologies. In Proceedings of the IJCAI Workshop
on Ontologies and Problem-Solving Methods.
Myers, K. (2000). Domain metatheories: Enabling user-
centric planning. In Proceedings of the AAAI Work-
shop on Representational Issues for Real-World Plan-
ning Systems (AAAI Technical Report WS-00-07).
Norman, D. (1998). The Psychology of Everyday Things.
Basic Books.
Soares, A. and Fonseca, F. (2009). Building ontologies for
information systems: What we have, what we need.
In Proceedings of iConference.
PRONTOE-ACaseStudyforDevelopingOntologiesforOperations
25
