
Evaluating Neuromodulator-controlled Stochastic Plasticity for Learning
Recurrent Neural Control Networks
Christian W. Rempis, Hazem Toutounji and Frank Pasemann
Institute of Cognitive Science, AG Neurocybernetics, Osnabrueck University, 49076 Osnabrueck, Germany
Keywords:
Neuromodulation, Benchmark, Learning, Sensori-motor Loop, Neurorobotics.
Abstract:
Learning recurrent neural networks as behavior controllers for robots requires measures to guide the learn-
ing towards a desired behavior. Organisms in nature solve this problem with feedback signals to assess their
behavior and to refine their actions. In line with this, a neural framework is developed where the synaptic
learning is controlled by artificial neuromodulators that are produced in response to (undesired) sensory sig-
nals. To test this framework and to get a base line to evaluate further approaches, we perform five classical
benchmark experiments with a simple random plasticity method. We show that even with this simple plasticity
method, behaviors can already be found for all experiments, even for comparably large networks with over
90 plastic synapses. The performance depends strongly on the complexity of the task and less on the chosen
network topology. This suggests that controlling learning with neuromodulators is a viable approach that is
promising to work also with more sophisticated plasticity methods in the future.
1 INTRODUCTION
One of the major challenges in the field of neuro-
robotics is to enable a robot to autonomously learn
neural networks as behavior controllers in the sensori-
motor loop. In this domain, efficient learning meth-
ods are rare due to the difficulties inherent to learn-
ing in recurrent neural networks. Although some ap-
proaches have been reported (Soltoggio and Stanley,
2012; Pitonakova, 2012; D
¨
urr et al., 2008; Hoinville
and H
´
enaff, 2004; Floreano and Urzelai, 2001), the
learning usually takes place in very small networks or
with network topologies very specifically adapted to
the task. One problem is to provide a proper feedback
signal, preferably generated by the network itself, to
guide the learning towards the desired behavior. This
problem can be addressed by extending the neural net-
work with a neuromodulator (NM) layer (Buckley,
2008; Doya, 2002; Fellous and Linster, 1998) that
enables the modulation of the learning process as re-
action to the observed behavior. A second problem
is the difficulty to decide, whether a synaptic weight
should be increased or decreased. In contrast to clas-
sical feedforward training, neither the desired output,
nor the actual effect of a weight change is known. In-
creasing and decreasing a synapse in such a network
may have the same effect on the behavior, depending
on the other parts of the network. Hence, the direct-
edness of the learning is a problem, because there are
no convincing heuristics about the correct direction of
a weight change.
To systematically examine these problems, we
presented a first framework for feedback driven learn-
ing with neuromodulator networks in (Rempis et al.,
2013). This framework (Sect. 2) allows the descrip-
tion of a desired behavior in terms of modulator sub-
networks, small network structures that monitor the
behavior of the robot and stimulate so-called neuro-
modulator cells (NMCs) in response to undesired or
beneficial behavior. Stimulated NMCs produce neu-
romodulators to trigger or inhibit plastic changes.
In the previous work we could show, that even
with a trivial plasticity method – random weight
changes – simple behaviors like obstacle avoidance,
locomotion and tropisms can be learned successfully
from scratch. In accordance with Ashby’s ultrastable
systems (Ashby, 1960), such networks stabilize in a
desired behavior after a while and keep that behavior
until a failure triggers further plastic changes to find a
better suited network configuration.
In this contribution, we provide a further analysis
of the performance and the limitations of this simple
approach. For this, we define five benchmark exper-
iments and test the learning performance with differ-
ent topologies of plastic network structures. These
benchmarks, among others, will serve as a base for
489
W. Rempis C., Toutounji H. and Pasemann F..
Evaluating Neuromodulator-controlled Stochastic Plasticity for Learning Recurrent Neural Control Networks.
DOI: 10.5220/0004554504890496
In Proceedings of the 5th International Joint Conference on Computational Intelligence (NCTA-2013), pages 489-496
ISBN: 978-989-8565-77-8
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

comparing more sophisticated learning approaches
currently under development. However, the bench-
marks may be of general interest for comparing dif-
ferent approaches against the simple random search
to ensure that the methods are, indeed, better.
In the next section we describe the modulator
network model with the simple random plasticity
method, followed by an introduction of the bench-
marks. Then, the results of the learning experiments
are discussed, in particular the limitations and charac-
teristics of this learning approach.
2 METHODS
A modulated neural network (MNN) can be based
on any kind of standard artificial neural network, ex-
tended by a neuromodulator layer (Buckley, 2008).
Some related approaches, though more specialized,
are e.g. GasNets (Husbands, 1998), Artificial En-
docrine Systems (Timmis et al., 2009) and Artificial
Hormone Systems (Moioli et al., 2009).
Our variant of a NM layer provides neuromodula-
tor cells (NMCs) that maintain spatial distributions of
NM concentrations as part of the network. NM pro-
duced by a NMC usually diffuses into the surround-
ing tissue and influences nearby network structures.
Each NMC represents a single source for a specific
NM type and maintains its own concentration level
and distribution within the network. The NM concen-
tration c(t, x, y) at each point in the network at time
t is the sum of all locally maintained concentration
levels c
i
(t, x, y) at that position.
NMCs are always in one of two modes: In produc-
tion mode the cell may increase its modulator concen-
tration, in reduction mode it may decrease it. To enter
the production mode, a NMC must be stimulated for
some time, whereas it falls back into reduction mode
when it was not stimulated for a while. Usually, the
concentration of the NM and its area of influence in-
crease and decrease depending on the current stimu-
lation and mode.
2.1 Linearly Modulated Neural
Networks (LMNN)
The specific variant of the modulated neural network
used for the first presented experiments is based on
the standard discrete-time neuron model given by
o
i
(t + 1) = τ
i
(θ
i
+
n
∑
j=1
w
i j
o
j
(t))), i, j = 1, . . . , n (1)
where o
i
(t) is the output of the neuron i at a dis-
crete time step t, w
i j
is the weight of the synapse from
neuron j to neuron i, θ
i
is a bias term of neuron i and
τ
i
a transfer function, for instance tanh.
The stimulation of NMCs follows a simple lin-
ear model. Each NMC is attached to a neuron and
is stimulated when the output of this neuron is within
a specified range [S
min
, S
max
]. At each time step t, in
which the NMC is stimulated, its stimulation level s
i
increases by a small amount given by parameter S
gain
.
If not stimulated, it decreases by S
drop
. If the stimula-
tion level exceeds a given threshold T
prod
, the NMC
enters the production mode. If the level decreases be-
low a second threshold T
red
, the NMC re-enters the
reduction mode. This allows the definition of various
delays and hysteresis effects between the two modes,
which is an important prerequisite for stable learning
(see Sect. 3).
s
i
(t + 1) =
(
min(1, s
i
(t) + S
gain
i
) if S
min
i
≤ o
i
(t) ≤ S
max
i
max(0, s
i
(t) − S
drop
i
) otherwise
(2)
In production mode the modulator concentration
c and the radius r of, here, a circular diffusion area
are increased from 0 to C
max
and R
max
respectively.
During reduction mode both decrease again. The rate
of change of the concentration is given by parameters
C
gain
and C
drop
, that of the radius similarly by R
gain
and R
drop
. Equation 3 shows this for the concentration
level c
i
; the area radius r
i
is defined analogously.
c
i
(t +1) =
min(C
max
i
, c
i
(t) +C
gain
i
)
if production mode
and still stimulated
max(0, c
i
(t) −C
drop
i
)
if reduction mode
and not stimulated
c
i
(t) otherwise
(3)
The diffusion mode of each NMC can be chosen,
so that the NM concentration is either constant across
the diffusion area, or decays according to a linear or
nonlinear function of the distance to the NMC. The
inhomogeneous distributions are interesting for sce-
narios with local learning. However, in the shown ex-
amples, we will restrict the experiments to a homoge-
neous, global modulation to demonstrate that success-
ful controllers can develop even in this simple case.
2.2 Plasticity via Modulated Random
Search
The synapses of the network react to NM exposure
with plastic changes. To demonstrate the viability of
IJCCI2013-InternationalJointConferenceonComputationalIntelligence
490

Table 1: Parameters of a NMC in a LMNN.
Parameter Description
Type The NM type produced by this NMC
S
min
, S
max
Stimulating neuron activation range
S
gain
, S
drop
Rate of stimulation gain and drop
T
prod
, T
red
Pro- and reduction mode thresholds
C
max
Max. concentration level of this NMC
C
gain
,C
drop
Rates of concentration gain and drop
R
max
Max. radius of the diffusion area
R
gain
, R
drop
Rates of diffusion area gain and drop
using neuromodulation to control the learning pro-
cess, we choose one of the most simple plasticity
methods available: Random weight changes. We
chose this stochastic plasticity method because it is
vastly unbiased and is capable of finding all kinds
of network topologies and weight distributions within
a given network substrate. Furthermore, the method
does not require any heuristics for the choice of the
network topology, except that solutions are possible
with the given structure.
For a synapse i, the probability of a weight change
p
w
i
at time t is the product of an intrinsic weight
change probability W
i
and the current NM concen-
tration c(t, x, y) at the position (x
i
, y
i
) of the synapse.
Hereby, each synapse may limit its sensitivity to NM
to a maximal concentration level M
i
to prevent too
rapid changes when large amounts of overlapping
NMs are present.
p
w
i
(t) = min(M
i
, c(t, x
i
, y
i
))W
i
, 0 < W
i
≪ 1 (4)
Stochastic weight changes may occur at any time
step, therefore W
i
must be very small. If a weight
change is triggered, a new weight w
i
is randomly cho-
sen from the interval [W
min
i
,W
max
i
], given as parame-
ters of the synapse.
In addition to weight changes, synapses can also
disable and re-enable themselves following a similar
stochastic process. The probability p
d
i
for a transition
between the two states during each time step is the
product of the modulator concentration c(t, x, y) and
the disable probability D
i
.
p
d
i
(t) = min(M
i
, c(t, x
i
, y
i
))D
i
, 0 ≤ D
i
< W
i
(5)
If a transition is triggered, an enabled synapse be-
comes disabled and vice versa. A disabled synapse
is treated as a synapse with weight w
i
= 0, but its
actual weight is preserved until it is enabled again.
This mechanism allows for a simple topology search
within a given neural substrate.
Table 2: Parameters of a Modulated Random Search
synapse.
Parameter Description
Type The NM type the synapse is sensitive to
W Weight change probability
D Disable / enable probability
W
min
,W
max
Min. and max. weight of the synapse
M Max. NM sensitivity limit of the synapse
3 EXPERIMENTS
3.1 Robots, Tasks and Environments
The experiments use robot systems typical for clas-
sical benchmark problems: a differential drive robot
(Fig. 1-e) and a simple pendulum (Fig. 1-f). In all
cases, motor neurons with an activation range [-1,1]
control the desired velocity of the motors. Negative
activations are interpreted as backwards rotation. The
differential drive robot is equipped with distance sen-
sors (DS) at the front, eight touch sensors (TS), three
ambient light sensors (ALS) to measure brightness
at three equally distributed positions on the robot,
and three directed light sensors (DLS) in the front of
the robot to sense the direction towards light sources
(with a maximal viewing angle of ±90 degrees). For
simplicity, light can penetrate obstacles freely. The
pendulum is equipped with an angular sensor for the
current angle of the pendulum. All experiments have
been simulated with the NERD Toolkit (Rempis et al.,
2010) and can be replicated with material from our
supplementary page.
The first experiment (E1) is a positive light
tropism task (Fig. 1-a). Four light sources are dis-
tributed in some distance from the corners of a
quadratic arena. At any time, only one light source
is switched on. Each light source is bright enough to
cover the entire arena. When the robot arrives at that
light source, it is switched off and a randomly chosen
source is switched on.
The second experiment (E2) focuses on an obsta-
cle avoidance task (Fig. 1-b), where the robot has
to navigate in a quadratic environment riddled with
round objects and sharp corners. The arena also com-
prises a number of light sources each emitting a differ-
ent, homogeneous light that allow the robot to recog-
nize different locations and hence to monitor its own
exploration behavior.
As a combination of the previous experiments, E3
extends the first experiment with four small obstacles
placed with a small asymmetric shift near the four
EvaluatingNeuromodulator-ControlledStochasticPlasticityforLearningRecurrentNeuralControlNetworks
491

a b
c
d
f
e
Figure 1: The differential drive robot (f) with three of the
environments (a-d) and the simulation of the pendulum (e).
The white spheres in (b,d) denote possible light source po-
sitions.
light sources (Fig. 1-c). Here, the robot has to ap-
proach the lights and simultaneously avoid the obsta-
cles next to the light sources.
A more difficult variant is experiment E4. While
the task remains the same, there are now larger obsta-
cles in the middle of the arena and one of the corners
is more narrow (Fig. 1-d). Furthermore, a fifth light
source was added in the center of the arena. All lights
are now also randomly moved away from their initial
positions every time they get switched on. In contrast
to E3 the robot now gets confronted with many more
different light-obstacle combinations, which makes
the task quite difficult.
The pendulum experiment (E5, Fig. 1-e) requires
the controller to learn to swing with a specific ampli-
tude between the two target angles ±65
◦
with a toler-
ance of ±5
◦
. The difficulty is that the motors are too
weak to get to the target angles without swinging the
pendulum up first.
3.2 Control Sub-Networks (CSN)
Each CSN includes the necessary sensory and motor
neurons, a number of intermediate processing neu-
rons and a bias neuron. The latter allows the bias of
neurons to be changed using the same technique as
used for other synapses. The network substrates vary
over the different experiments, ranging from trivial
feed-forward networks over a layered network with
4 hidden neurons, to fully connected, recurrent net-
works with 2, 4 and 6 intermediate neurons. The net-
Table 3: Experiment setups. τ
exp
is the experiment time in
simulated minutes, τ
temp
is the duration in minutes with-
out neuromodulation production to consider a behavior a
successful temporary solution. See text for further descrip-
tions.
Exp. τ
exp
τ
temp
Sensors NMC Modules
E1 120 0.5 2 DLS Light
E2 240 5 3 DS Obst, Drive, Explore
E3 720 0.75 2 DS, 2 DLS Light, Obst
E4 720 0.75 2 DS, 2 DLS Light, Obst
E5 240 5 1 AS 2 × TurningAngle
work configurations for the experiments are summa-
rized in Table 3.
3.3 Modulatory Sub-Networks (MSN)
Each MSN uses experiment-specific network struc-
tures to detect undesired behavior based on (sensor)
activations to produce NMs when needed. As a re-
action to the NMs, synapses of the CSN randomly
change and explore different topologies and weight
distributions. This has an effect on the behavior and,
accordingly, on the NM production in the MSN. Simi-
lar to the work by Ashby (Ashby, 1960), the system is
destabilized when an undesired behavior is detected,
leading to continuous changes until the system stabi-
lizes again in a new, valid configuration. In this spirit,
six different NMCs are used in the experiments:
The Obst cell reacts on the activation of any of the
eight force sensors to detect undesired contact with
objects. The stimulation is quite rapid so that obstacle
contact immediately leads to NM production to alter
the behavior.
Drive gets stimulated when the two motor signals
are too low, the robot is moving backwards, or the dif-
ference of the motors becomes too large, i.e. the robot
is moving in narrow circles. Because the desired be-
havior also may include moving backwards and espe-
cially moving in circles, the stimulation is less rapid
and tolerates such movements as long as they do not
dominate the behavior.
Explore is stimulated when the robot is not enter-
ing the detectable locations frequently. Its associated
modulating network classifies the signal of one of the
ambient light sensors into the nine detectable loca-
tions (inspired by place cells (O’Keefe and Dostro-
vsky, 1971)) and integrates these signals to deter-
mine the duration of each location not being visited.
Explore is stimulated if some locations have not been
visited for a long time. If a location is entered that has
not been visited for a long time, then all integrator
neurons for all locations are inhibited, so this poten-
tial behavior improvement already leads to a fast NM
IJCCI2013-InternationalJointConferenceonComputationalIntelligence
492

S
M
CSN
MSN
CSN
MSN
S
S
S
S
S
S
S
S
S
S
M
B
S
S
S
MM
S
S
S
S
B
S
S
S
S
S
S
S
S
ObstLight
ObstDrive
Explore
S
M
B
Disabled Synapse
NMC Neuron
Sensor Motor
Bias
S
Loc1
Loc2 Loc8 Loc9
...
E2 E3
Figure 2: Network for Pendulum, Network for Pole Bal-
ancer.
decrease to allow the new configuration to be tested.
The Light cell also uses an auxiliary network that
interprets the ambient light sensors to detect whether
the robot is getting closer to the light. If not, the NMC
is stimulated.
TurningAngle gets persistently, but slowly stim-
ulated over time. However, if the pendulum changes
its swinging direction within the desired angle range,
then the NMC stimulation decreases rapidly. The de-
sired angular range can be adjusted independently for
each of the two NMCs in the pendulum networks.
Table 3 shows which NMCs, with their corre-
sponding auxiliary networks, are used in each ex-
periment. Figure 2 shows the structure of both the
CSN and the MSN for experiments E2 and E3, giv-
ing also the neural structures for the six auxiliary sub-
networks.
The experiments here are restricted to a global
modulator release with a uniform concentration lev-
els. For a discussion, see (Rempis et al., 2013). Table
4 summarizes the parameter choices for the NMCs
used across the experiments.
3.4 Experiments Setup
Each experiment has been run with five different net-
work substrates for the CSN: a layered network with
4 intermediate neurons (L4) and four fully, recurrently
connected networks with 0, 2, 4 and 6 intermedi-
ate processing neurons (N0-N6). Due to the differing
number of motors and sensors, the total number of
synapses varies. An overview can be found in table
5. All additional settings of the network, specifically
the settings for the plastic synapses and the NMC set-
tings, have been fixed at the values given in tables 4.
Each such learning scenario (experiment + net-
work substrate) has been repeated 50 times with iden-
tical settings, each starting with a new CSN composed
of disabled synapses with zero weights. Thus, the en-
tire network topology and the synaptic weights had
to be learned from scratch within the given network
substrate.
4 RESULTS AND DISCUSSION
For all experiments and with all but one of the dif-
ferent network substrates, solutions have been found
within the given time windows. All behaviors dis-
covered in this way have been sufficiently effective
and comply with the desired and expected behaviors.
However, as can be seen in figure 3, by far not all
runs did finally end up with a proper behavior network
during the limited learning time. Consistent with in-
tuition, the easier the task is, the larger the percentage
of successful learning trials.
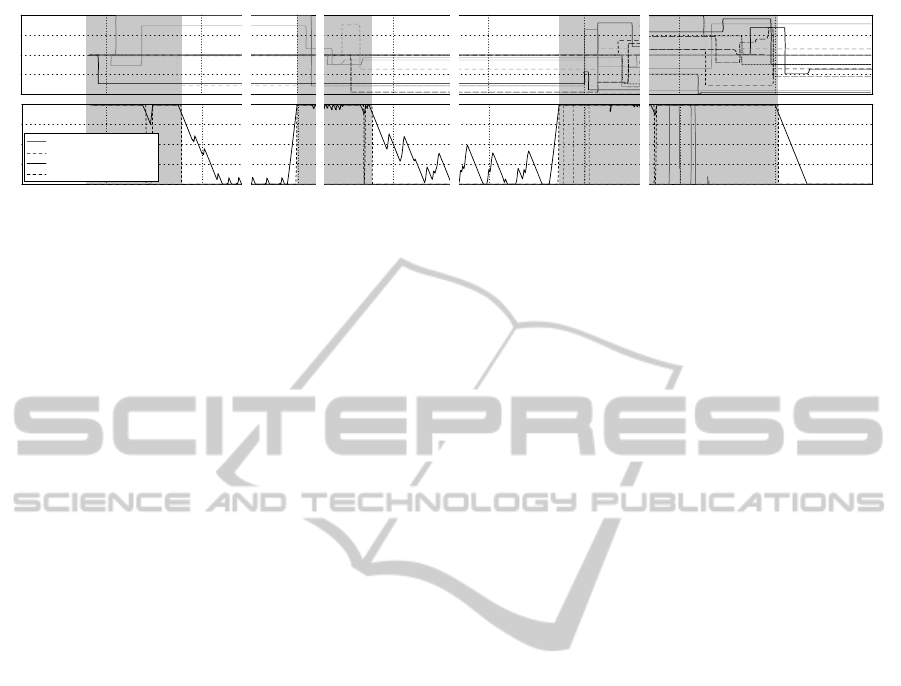
The simple light tropism task, therefore, led to
successful behaviors in almost all cases, despite its
comparably short learning time of up to only two
hours. Also, the final solutions have been found very
fast (Fig. 4A-E1) without many intermediate temporal
solutions (Fig. 4C-E1).
In contrast, the almost similarly short duration of
the obstacle avoidance task with four hours seems to
be much too low to consistently find solutions, con-
trary to our expectation. Therefore, only about half
of the experiments were successful. A reason for
this may be the relatively slow detection of insuffi-
cient exploration behavior with the Explore NMC.
This modulator has to react with a larger delay to give
the networks a chance to actually do exploration. So,
behaviors violating the exploration condition – while
still doing a fine obstacle avoidance – are detected
only after a significant delay. Also, such intermediate
solutions get destroyed quite easily when a bad ex-
ploration behavior is detected, leading to the destruc-
tion – not to a refinement – of the temporary solu-
tion. This, obviously, is one of the major limitations
of the stochastic search: due to the missing directed-
ness of the learning, temporary solutions are usually
not improved, but rather destroyed and replaced by
very different networks. This can be seen in figure
4E that shows the average differences per synapse be-
tween two successive (temporary) solutions. Indepen-
dently of the chosen architecture and the experiment,
this difference is quite large with ≈ 0.5 per synapse
EvaluatingNeuromodulator-ControlledStochasticPlasticityforLearningRecurrentNeuralControlNetworks
493

Table 4: Parameter values for NMCs in the experiments.
Param. Obst Drive Explore Light TurningAngle Param. Synapses
S
min
, S
max
0.9,1.0 0.9,1.0 0.4,1.0 0.9,1.0 0.5,1.0 W 0.0001
S
gain
, S
drop
0.01,0.01 0.001,0.001 0.001,0.01 0.0002,0.0001 0.005,1 D 0.00002
T
prod
, T
red
0.95,0.95 0.95,0.95 0.95,0.95 0.99,0.99 0.95,0.95 W
min
−1.5
C
max
2 1 1 1 1 W
max
1.5
C
gain
,C
drop
0.1,0.1 0.001,0.01 0.001,0.01 0.01,0.1 0.001,1 M 1.0
0
50
100
E1 E2 E3 E4 E5
N0
N2
L4N4
N6
N0
N2
L4N4
N6
N0
N2
L4N4
N6
N0
N2
L4N4
N6
N0
N2
L4N4
N6
Figure 3: Percentage of successful experiments with stable
solutions. The gray tips indicate the number of temporary
solutions with a continuous modulator-free behavior during
at least 30 minutes, which would be interpreted as solutions
in short-term evaluations.
Table 5: Number of plastic synapses in each of the exper-
iments. L4 provides a layered network with 4 neurons, all
others are fully connected.
Number of Processing Neurons
N0 N2 N4 N6 L4
E1 14 32 60 96 46
E2 10 28 54 88 42
E3 14 32 60 96 42
E4 14 32 60 96 42
E5 4 15 35 63 32
weight, which indicates large differences between the
networks. For the obstacle avoidance behavior this
means that large parts of the experimental time are
spent with enabled learning (Fig. 4D-E2) or in tem-
porary behaviors that are too short-lived to be consid-
ered by us being a temporary solution (< 5 minutes
without modulation, see figure 3).
The results for the combination of the two tasks
(E3) reflect the increasing difficulty of the task. Even
tough the experiment was simulated 12 hours per try,
only ≈ 20% of the runs lead to a fully stable behav-
ior. First temporary solutions have been found quite
fast (Fig. 4B-E3), but most light tropism behaviors
with only a partial obstacle avoidance behavior are
easily destroyed due to hitting one of the small ob-
stacles close to the light sources. Because the light
sources are approached with slightly different angles,
at some point a situation is encountered where the ob-
stacle avoidance behavior briefly fails and the obsta-
0
50
100
0
50
100
150
200
0
200
400
600
0
200
400
600
0
50
100
150
200
0
50
100
0
50
100
150
200
0
200
400
600
0
200
400
600
0
50
100
150
200
0
10
20
30
0
10
20
30
0
10
20
30
0
10
20
30
0
10
20
30
0
50
100
0
50
100
150
200
0
200
400
600
0
200
400
600
0
50
100
150
200
0
0.5
1
0
0.5
1
0
0.5
1
0
0.5
1
0
0.5
1
E1 E2 E3 E4 E5
A
B
C
D
E
N0
N2
L4N4
N6
N0
N2
L4N4
N6
N0
N2
L4N4
N6
N0
N2
L4N4
N6
N0
N2
L4N4
N6
Figure 4: (A) Time to final solution. (B) Time to first (tem-
porary) solution. (C) Number of (temporary) solutions. (D)
Minutes spent in learning mode. (E) Average changes per
synapse between successive (temporary) solutions.
cle is hit. This leads to a strong production of NM
and the behavior is usually destroyed. This alterna-
tion between many temporary solutions (Fig. 4C-E3)
and the subsequent network destruction, and thus long
phases with enabled plasticity (Fig. 4D-E3), describes
the typical way how network configurations are ex-
plored with the stochastic search: only if all require-
ments of the behavior are fully met with a single mu-
tation burst, the behavior remains stable in the long
run. This all or nothing approach is another limiting
characteristics of the simple stochastic search.
This becomes even more severe in the aggravated
IJCCI2013-InternationalJointConferenceonComputationalIntelligence
494
1
0.5
0
1.5
0
-1.5
Stimulation Obst
Concentration Obst
Stimulation Light
Concentration Light
Modulation Modulation Modulation
Stable Stable Final
Figure 5: Example run for the light tropism behavior, showing the alternation between stable and plastic states during the
behavior learning. The upper graph shows the individual weights over time, the lower graph the stimulation and concentration
level of the two NMCs.
variant of this experiment (E4), in which large and
more various obstacles enforce the robot to do sig-
nificant detours against the desired direction towards
the light. Here, a proper behavior requires a fine tun-
ing of weights, which makes it much more difficult
to accidentally stumble upon a working network. The
percentage of final solutions, therefore, is even lower
with only about 10%. However, the number of long-
term temporary solutions with a continuous runtime
of more than 30 minutes exceeds the number of stable
solutions by a factor of ≈ 2 (Fig. 3E4). These behav-
iors would in many evaluations with a short test (e.g.
evolutionary algorithms) already be considered solu-
tions, but it shows that even slight weaknesses due
to an unfortunate sequence of target light sources can
lead to a destruction of such almost stable networks
in the long run. As in E3, temporary solutions are
found quite fast (Fig. 4B-E4), but are destroyed later,
so that most of the time is spent trying new network
configurations (Fig. 4D-E4).
The pendulum behavior again is an example of a
simpler single-goal task. The number of successful
runs is, with almost 50%, quite high and the networks
are also found fast within the first 2 hours (of a total
of 4 hours). Due to the characteristics of the exper-
iment, there are almost no temporary solutions: if a
solution is found, then this solution tends to be sta-
ble in the long run, because there are no disturbances
in the simple pendulum motion (compare Fig. 4A-E5,
4B-E5, and 4C-E5).
An interesting observation can be made concern-
ing the network complexity. It was expected, that the
performance of the experiments primarily depends on
the size of the neural substrate, because with an in-
creasing search space the probability of finding a sta-
ble solution should drop down significantly. However,
at least for the network sizes used in these experi-
ments, there is only a small influence of the network
substrate on the performance (Fig. 3). Only in E2 the
largest network showed a significant drop in the num-
ber of solutions compared to the other substrates in
the same experiment. And in E5 it seems that the
layered network has an advantage over the fully re-
current neural networks. This may indicate, that – as
long as the topology can vary within the substrate –
there are similar or equivalent network configurations
contained in all substrates and that with an increas-
ing number of synapses, the fraction between feasible
and improper network configurations may remain in
the same order of magnitude. In forthcoming experi-
ments, larger networks have to be tested to find the ac-
tual limiting size for this simple class of robot exper-
iments. In these experiments, anyway, the impact of
the chosen experiment complexity has a much higher
impact on the performance than the chosen network
substrate, so the major effort in designing such ex-
periments should probably be focused on defining a
well suited experiment, not on choosing a particularly
suited network substrate.
To examine the learning process in more detail,
figure 5 shows the weight changes and the related
neuromodulator concentrations for one of the learn-
ing runs in experiment E2. As expected, the weight
changes in learning phases are random and undi-
rected. However, from time to time, the system sta-
bilizes in a network configuration, because no neuro-
modulator is produced as a response to the (partially)
working behavior. It can also be seen in the lower
part of figure 5 that even during these stable states,
the stimulation of the NMCs is not just zero, but that
their stimulation level remains active, though not high
enough to enter their production mode. So, slight vi-
olations of the behavior restrictions still take place,
but these violations are not strong enough to be in-
terpreted as a failing behavior. But if the stimulation
level exceeds the limit to production mode, then of-
ten one of the first random changes destabilizes the
system so much, that other neuromodulators are trig-
gered as side-effect. This leads to a strong relearn-
ing, usually destroying the previous temporary solu-
tion, until the modulation stops when a new poten-
tially working configuration has been found.
EvaluatingNeuromodulator-ControlledStochasticPlasticityforLearningRecurrentNeuralControlNetworks
495

5 CONCLUSIONS
We demonstrated with five typical experiments from
the field of robot learning and early evolutionary
robotics, that a simple random search on a given net-
work topology is sufficient to find many suitable so-
lutions, as long as the network changes are started
and stopped by a reasonable feedback signal. In our
case, this feedback is realized with neuromodulators
that are triggered as a reaction to the sensed behav-
ior. Because of this, and the simplicity of the im-
plementation, the learning should also work directly
on physical robots without external supervision. The
benchmarks show that the feasibility of the method
strongly depends on the experiment complexity, not
so much on the chosen network substrate. Also, tem-
porary solutions appear and get relearned when the
behavior proves ineffective in some situations. These
aspects – already available in such a simple approach
– are highly desired in the field of robot learning to
allow adaptive, self-contained robots with life-long
learning capabilities. The method, however, is not
meant to be used as a competitive learning paradigm
for real robots. Instead, one intention of the bench-
mark is to provide a minimal testbed to evaluate new
learning paradigms for recurrent neural networks in
the sensori-motor loop. These paradigms should be
better in some aspects compared to such a simple ran-
dom search to justify their usually much higher com-
plexity. For this, the benchmarks are also publicly
available at the supplementary page.
Supplementary Material can be found at:
nerd.x-bot.org/neuromodulator-benchmarks
ACKNOWLEDGEMENTS
This work was partially funded by DFG-grant PA
480/7-1. We thank Josef Behr and Florian Ziegler for
testing and refining the simulation model and for their
contributions to the NERD toolkit.
REFERENCES
Ashby, W. R. (1960). Design for a brain: The origin of
adaptive behavior (2nd edition). Chapman and Hall,
London UK.
Buckley, C. L. (2008). A systemic analysis of the ideas im-
manent in neuromodulation. PhD thesis, University of
Southampton.
Doya, K. (2002). Metalearning and neuromodulation. Neu-
ral Networks, 15(4-6):495–506.
D
¨
urr, P., Mattiussi, C., Soltoggio, A., and Floreano, D.
(2008). Evolvability of neuromodulated learning for
robots. In Proc. of the 2008 ECSIS Symposium on
Learning and Adaptive Behavior in Robotic Systems,
pages 41–46.
Fellous, J. and Linster, C. (1998). Computational models
of neuromodulation. Neural Computation, 10(4):771–
805.
Floreano, D. and Urzelai, J. (2001). Neural morphogene-
sis, synaptic plasticity, and evolution. Theory in Bio-
sciences, 120(3):225–240.
Hoinville, T. and H
´
enaff, P. (2004). Comparative study of
two homeostatic mechanisms in evolved neural con-
trollers for legged locomotion. In Proc. of IEEE/RSJ
International Conference on Intelligent Robots and
Systems, IROS 2004, volume 3, pages 2624–2629.
Husbands, P. (1998). Evolving robot behaviours with
diffusing gas networks. In Proc. of Evolutionary
Robotics, EvoRob’98, volume 1468 of LNCS, pages
71–86. Springer.
Moioli, R., Vargas, P., and Husbands, P. (2009). A multiple
hormone approach to the homeostatic control of con-
flicting behaviours in an autonomous mobile robot. In
Proc. of IEEE Congress on Evolutionary Computa-
tion, CEC’09, pages 47–54.
O’Keefe, J. and Dostrovsky, J. (1971). The hippocampus as
a spatial map: Preliminary evidence from unit activity
in the freely-moving rat. Brain Research, 34(1):171–
175.
Pitonakova, L. (2012). Ultrastable neuroendocrine robot
controller. Adaptive Behavior, 21(1):47–63.
Rempis, C. W., Thomas, V., Bachmann, F., and Pasemann,
F. (2010). NERD - Neurodynamics and Evolutionary
Robotics Development Kit. In SIMPAR 2010, volume
6472 of LNAI, pages 121–132. Springer.
Rempis, C. W., Toutounji, H., and Pasemann, F. (2013).
Controlling the learning of behaviors in the sensori-
motor loop with neuromodulators in self-monitoring
neural networks. In Workshop on Autonomous Learn-
ing at the IEEE International Conference on Robotics
and Automation, ICRA 2013.
Soltoggio, A. and Stanley, K. (2012). From modulated
hebbian plasticity to simple behavior learning through
noise and weight saturation. Neural Networks, 34:28–
41.
Timmis, J., Neal, M., and Thorniley, J. (2009). An adap-
tive neuro-endocrine system for robotic systems. In
Proc. of the IEEE Workshop on Robotic Intelligence
in Informationally Structured Space, RIISS’09, pages
129–136.
IJCCI2013-InternationalJointConferenceonComputationalIntelligence
496
