
Towards Easy Robot Programming
Using DSLs, Code Generators and Software Product Lines
Johannes Baumgartl
1
, Thomas Buchmann
2
, Dominik Henrich
1
and Bernhard Westfechtel
2
2
Chair of Applied Computer Science I, University of Bayreuth, Universitaetsstrasse 30, 95440 Bayreuth, Germany
1
Chair of Applied Computer Science III, University of Bayreuth, Universitaetsstrasse 30, 95440 Bayreuth, Germany
Keywords:
Model-Driven Development, DSL, Code Generation, Robot, Easy Programming, Software Product Lines.
Abstract:
Programming robots is a complicated and time-consuming task. A robot is essentially a real-time, distributed
embedded system. Often, control and communication paths within the system are tightly coupled to the actual
physical configuration of the robot. Thus, programming a robot can hardly be achieved by experts of the
domain in which the robot is used. In this paper we present an approach towards a domain specific language,
which is intended to empower domain experts or even end users to specify robot programs with a dedicated
background in programming techniques, but not with special knowledge in the robotics domain. Furthermore
we introduce an idea to integrate a software product-line for a hardware and software transparent plug and
play mechanism.
1 INTRODUCTION
A robot is essentially a real-time, distributed em-
bedded system. Often, control and communication
paths within the system are tightly coupled to the ac-
tual physical configuration of the robot. Robot sys-
tems consist of different hardware components and
different sensors which results in a very complex
and highly variable system architecture. As a con-
sequence, these robots can only be assembled, con-
figured, and programmed by experts. While this is
the state of the art for industrial robots, it is evident
that this approach is not feasible for personal robots
(Wyrobek et al., 2008). As the name implies, personal
robots are targeted towards individuals by providing a
human interface and a special design. By definition,
a personal robot enables individuals to automate the
repetitive or menial part of their home and work lifes.
Model-driven software engineering (Frankel,
2003; V
¨
olter et al., 2006) puts strong emphasis on the
development of high-level models rather than on the
source code. Models are not considered as documen-
tation or as informal guidelines how to program the
actual system. In contrast, models have a well-defined
syntax and semantics. Moreover, model-driven soft-
ware engineering aims at the development of exe-
cutable models. Code generators are used in model-
driven software engineering, to transform the speci-
fication of higher-level models into source code. A
Domain-Specific Language (DSL) is a programming
or specification language which is dedicated to a par-
ticular problem domain.
Software Product Line Engineering (SPLE)
(Clements and Northrop, 2001; Pohl et al., 2005;
Weiss and Lai, 1999) deals with the systematic de-
velopment of products belonging to a common sys-
tem family. Rather than developing each instance of
a product line from scratch, reusable software arti-
facts are created such that each product may be com-
posed from a library of components. Furthermore, it
provides means to capture and manage the variability
of a particular application domain. In common ap-
proaches, feature models (Kang et al., 1990) are used
for that purpose.
In this paper we present an approach towards a
domain-specific language, which is intended to em-
power individuals to specify robot programs with a
dedicated background in programming techniques but
not in the robotics domain. Furthermore we sketch
our product line approach which allows to manage the
variability which is introduced in robotics by different
hardware and different algorithms. Furthermore, the
model-driven product line approach allows automatic
configuration as well as automatic verification of ex-
isting DSL programs.
548
Baumgartl J., Buchmann T., Henrich D. and Westfechtel B..
Towards Easy Robot Programming - Using DSLs, Code Generators and Software Product Lines.
DOI: 10.5220/0004585305480554
In Proceedings of the 8th International Joint Conference on Software Technologies (ICSOFT-PT-2013), pages 548-554
ISBN: 978-989-8565-68-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

2 APPROACH
2.1 Motivation
Before we start with a detailed description of our ap-
proach, let us briefly give a motivating example. In
service robotics, pick and place applications are a
standard usage scenario. The robot has to pick (pos-
sibly previously unknown) objects (Baumgartl and
Henrich, 2012) from location A and place them some-
where in location B. This task, which sounds simple
at first glance requires several complex subtasks:
1. Object Modeling. The object that has to be picked
is either already known and needs to be identi-
fied in the database or it needs to be reconstructed
by the robot’s sensors. The captured scene has to
be split into objects belonging to the environment
and graspable objects.
2. Grasp Planning. Grasp planners should compute
a high number of different stable grasps for the
object to be manipulated in order to manage com-
plex tasks in open environments.
3. Path Planning. Path planners are used to deter-
mine a short collision-free approach motion of the
robot to the object.
4. Grasp Object. Select and execute one planning
result from the previous two steps and physically
grasp the object.
5. Validation. The validation step is performed to
check the result of the previous task (Step 4). The
following cases may occur: (1) The grasp totally
failed, i.e. the object was not grasped. (2) After
the grasp, the object slipped between the gripper
fingers and the relative position of the gripper to
the object differs from the planned result. (3) The
grip was executed as planned.
6. Placement Planning. Placement planning differs
with respect to robotic application that has to be
developed. Standard robotic problems are for ex-
ample: (1) bin packing, (2) peg in hole, (3) sort-
ing, and (4) assembly.
7. Path Planning. Like described in step 3, another
path planner is required to determine the motion
of the robot to the target position.
8. Execute. Execute the results from the previous
two steps and complete the task.
9. Validation. Analogously to Step 5, a validation is
performed to check the result of the task execu-
tion.
Please note that the order of the different plan-
ning tasks my differ with respect to the application
that has to be solved, i.e., some tasks might require
placement planning before grasp planning and vice
versa. Even with the support of a robotics framework
which abstracts from the hardware and encapsulates
algorithms for image detection, image processing and
planning, C++ source code for our example pick-
and-place scenario comprises several hundred lines of
hand-written code.
2.2 Vision
2.2.1 Requirements
It is evident, that we can not expect end users to spec-
ify programs solving the scenario described in section
2.1. As a consequence domain-specific languages at
a high-level of abstraction are required for that pur-
pose. According to our example, we are able to define
several core requirements, which have to be met by a
DSL which is targeted towards end users:
Complex Operations. As demonstrated in section
2.1, grasping and placing objects requires several
complex operations conducted in a given order.
However, the end user should only need to deal
with abstract concepts like grasp and place. Fur-
thermore, the user does not have to deal with the
order in which certain sub tasks, like grasp plan-
ning or placement planning are executed.
Abstraction. Personal robots need to be able to cap-
ture their open environment. Therefore they are
equipped with different sensors. However, end
users should not have to deal with accessing sen-
sors and processing sensor data. Thus, the DSL
should only provide means to specify and refer-
ence objects.
Variability Support. We observe variability in
robotic applications on different levels: On
hardware level, variability occurs for example
within the sensors that are used to capture open
environments, while on software level different
implementations of planning algorithms exists
which differ from each other in terms of execution
speed or accuracy. Hence, our approach needs to
provide support for this fact.
Plug and Play. Support for runtime reconfiguration
is required, as hardware or software components
might be changed or updated during the life-
time of a personal robot. Consequently, the DSL
and the corresponding code generator need to be
adopted to the new configuration accordingly by
providing new or removing old language con-
structs for example.
TowardsEasyRobotProgramming-UsingDSLs,CodeGeneratorsandSoftwareProductLines
549
DSL
concrete
syntax
DSL code generation
DSL
abstract
syntax
operates on
writes
End user
Robotics framework (C++)
Path
planner
Grasp
planner
Placement
planner
Collision
detection
Scene
reconstruc-
tion
...
generates code for
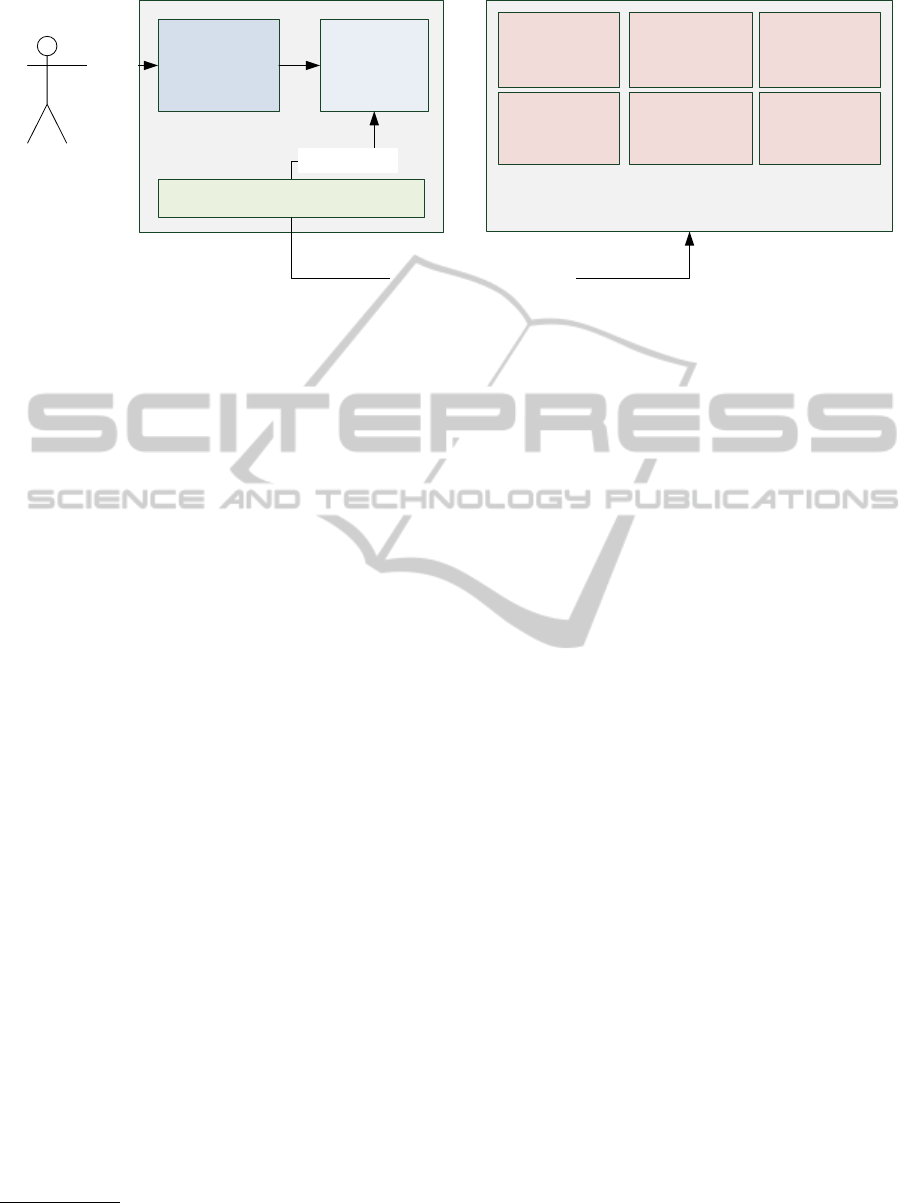
Figure 1: DSL and code generation on top of a C++ framework.
2.3 Solution Overview
Figure 1 depicts the first step towards the end user
DSL for personal robots, which will be described in
the following:
The DSL will be provided as a plug-in for the
Eclipse environment. Thus, the abstract syntax is de-
fined using the Eclipse Modeling Framework (EMF)
(Steinberg et al., 2009). We chose to use a textual con-
crete syntax which will be implemented using Xtext
1
.
Our approach enables end users to specify programs
for personal robots at a high level of abstraction. As
described in the previous section, sequences of com-
plex operations are encapsulated by high-level opera-
tions like grasp, place or drop for example. After the
robot program has been specified by the user, C++
code is generated which uses our robotics framework.
We use Acceleo
2
as M2T engine, as it is the only M2T
framework within the Eclipse context which is based
on an official standard (MOF Model-to-text (OMG,
2008)). The robotics framework is composed of dif-
ferent building blocks, each of which is dedicated
to a specific problem within a robotics application,
e.g. path planning (Gecks and Henrich, 2009) includ-
ing automatic sensor base adaption (Deiterding and
Henrich, 2007), grasp planning, or placement plan-
ning. The resulting C++ code is then compiled and
deployed to the target hardware (i.e. the robot). In
section 3, we provide results from a case study in
which we developed a DSL for pick-and-place oper-
ations. The only difference to the approach sketched
in Figure 1 is that we generated specific code for a
robot simulator rather than generating code which is
executed on a real hardware.
As stated in the previous section, the domain of
personal robots includes a large amount of variabil-
1
http://www.eclipse.org/Xtext
2
http://www.eclipse.org/Acceleo
ity. The high complexity is a result of the variability
within hardware components as well as the variability
within algorithms used in a robot’s software. There is
a wide range of different planning algorithms which
differ with respect to execution speed or accuracy but
also to required hardware. To manage the variabil-
ity and the resulting complexity, we will apply a soft-
ware product line engineering approach. Common-
alities and variabilities of both hardware and software
components within the robotic domain are captured in
a feature model, as shown in Figure 2. The elements
of the feature model are then mapped onto the cor-
responding implementation fragments. As both, the
DSL concrete and abstract syntax as well as the Ac-
celeo code generation are based upon Ecore, we plan
to use FAMILE (Buchmann and Schw
¨
agerl, 2012) to
map features on corresponding implementation frag-
ments.
Please note, that the scope of the domain-specific
language highly depends on the available hardware
of the robot. Thus, it is important that the DSL and
the corresponding code generation may be (automat-
ically) customized to match a specific hardware con-
figuration. E.g. there is a wide range of different grip-
pers starting from parallel jaw grippers up to dexter-
ous robot hands. The basic functionality of all is open
and close the gripper. Commonly, additional features
are choosing grasp speed, force, etc. Furthermore,
there are grippers with special functions like, auto-
matic sensor based repositioning of the grasped object
within the gripper fingers. It is evident, that those ad-
vanced grippers need additional language constructs
within the DSL to map their functionality.
After a valid feature configuration has been cre-
ated either by a robot systems engineer or is automat-
ically retrieved via a plug and play mechanism, it is
applied to both the DSL as well as the framework.
In particular the DSL is tailored towards the specific
ICSOFT2013-8thInternationalJointConferenceonSoftwareTechnologies
550

DSL
concrete
syntax
DSL code generation
DSL
abstract
syntax
operates on
writes
End user
Robotics framework (C++)
Grasp
planner N
Grasp
planner B
Path
planner N
Path
planner B
Path
planner A
Grasp
planner A
Placement
planner N
Placement
planner B
Placement
planner A
Collision
detection
N
Collision
detection B
Collision
detection A
Scene
reconstruc-
tion N
Scene
reconstruc-
tion B
Scene
reconstruc-
tion A
...
...
...
Product Line
map
map
Feature Model Feature Configuration
Figure 2: Integration with the product line approach, to realize variability.
needs, i.e. unused or unsupported language constructs
are omitted. Consequently, also the code generator
templates are adopted accordingly. Furthermore, the
robotics framework is tailored to the specific needs in
order to deploy only mandatory building blocks to the
target hardware. As a result, a small and customized
environment is generated in which the end user can
now specify robot programs.
By applying our model-driven approach, we are
able to verify the correctness of already existing robot
programs, after a system reconfiguration (e.g. by
changing / updating the robot’s hardware) has been
performed. Furthermore, model-to-model transfor-
mation may be applied to map obsolete language con-
structs to new ones.
3 CASE STUDY
To proof the validity and feasibility of our approach,
we created a small case study located in the domain of
pick and place applications. Pick and place operations
are standard robot operations and therefore they serve
as a good example for our DSL. To speed things up for
our tests, we used ROS (Robot Operating System)
3
, a
robot simulation environment, as backend. ROS en-
3
http://www.ros.org/wiki
ables software developers to create robot applications
by providing libraries for hardware abstraction, de-
vice drivers, visualizers, and many more.
In the following we describe our DSL and the
correlated ROS code by means of a standard robotic
problem: A given set of objects should be sorted ac-
cording to specific criteria and one of the resulting
subsets should be manipulated. In our example, the
objects are located on a given table. First, the robot
must detect the objects on this table. Note, in this ex-
ample all objects are available in an object database.
And second, the robot should throw all blue objects to
the also given bin.
Basically, we implemented an object-centered
language. Listing 1 shows the solution of the pro-
posed problem. By means of this example we explain
the basic ideas of our DSL.
The DSL program code has two sections, a define
section for initialization, and a second section for the
program logic. A program always starts with a de-
fine section where the mandatory descriptions for a
proper execution are given, including the definition of
objects, sets of objects, and topological arrangements.
Objects do have a configuration composed of a po-
sition and orientation. They also have different op-
tional properties, like a material, mass or figure, of-
fering the opportunity to apply operations to them.
The user has the possibility to pre-define topolog-
TowardsEasyRobotProgramming-UsingDSLs,CodeGeneratorsandSoftwareProductLines
551

Listing 1: DSL program for sorting some reconstructed objects by
color and throw the blue ones into the bin.
1 def i n e {
2 Ob j e c t bi n {
3 fi g u r e b ow l
4 mater i a l Gr e e n
5 posit i o n ( 0 .65 0 . 00 0 . 74 )
6 o r i e n t a t i o n ( 0. 0 0. 0 0.0 )
7 ma ss 15 . 0
8 }
9
10 Ob j e c t t a ble {
11 fi g u r e t a ble
12 mater i a l w o o d
13 posit i o n ( 0.8 - 0.34 0. 74 )
14 o r i e n t a t i o n ( 0. 0 0. 0 0.0 )
15 }
16
17 Topol o g y TO P { a x i s z di r e c t i o n p os }
18 }
19
20 S et s < - d ete c t O b j e c t s ( tab le , TO P )
21
22 s - > f o r A ll ( o . m a t e r i a l == Blu e ) {
23 gr a s p o
24 dr op ( bin , T OP )
25 }
ical arrangements like TOP as shown in Listing 1 for
further reuse. In our example TOP indicates that if
object A is on top of object B, the corresponding z co-
ordinate of property position of A has a greater value
than the one of B.
Within the program logic section, the user may use
the following language constructs to specify the robot
behavior:
Grouping Objects. Using the Set keyword, arbitrary
objects which could either be retrieved dynami-
cally allocated by the robot’s sensors or manually
specified. For example by the detectObjects key-
word. In our example provided in Listing 1 all
objects on top of the table will be included in the
set.
Selecting Objects. To manipulate sets of objects,
different set operations are provided similar to the
ones defined in OCL (OMG, 2012). E.g. forAll
iterates over all elements of a set and selects the
ones that satisfy the given constraint(s).
Manipulating Objects. There are two different
ways how objects may be manipulated: (1) the
position or (2) the orientation are changed. The
DSL offers the keywords grasp, place and drop
for this purpose. In contrast to a place operation
where a stable configuration of the object after it
was released is essential, a drop operation puts no
post-conditions on the corresponding objects.
Between a grasp and a place or drop operation
there is an implicit transfer movement. To provide
a high-level of abstraction, we only take into account
the configuration of an object rather its trajectory be-
tween source and target location. The advantage of
this approach is that we need not take care about the
movement, collision detection, safety, and many more
aspects. Furthermore, the user does not need to do
low-level sensor data processing, as for instance the
detection of blue objects in the scene using a color
camera.
However, the drawback is that tasks, which have
trajectories as main aspect, can not be solved with the
proposed DSL.
In case we wanted to specify the robot behavior as
given in the example (Listing 1) instead by handwrit-
ten C++ code directly in the ROS environment then
much more effort would be required. A prerequisite
is to correctly setup the ROS environment by loading
all required modules and starting corresponding ser-
vices (approx. 50 LoC). After that the program logic
might be defined. The first step is to detect all objects
(30 LoC). Second, the detected objects are passed to
the collision detection module (20 LoC). This mod-
ule also returns a set of graspable objects. To grasp
one of them, 45 LoC are needed and another 50 LoC
are required to drop it. Please note, that we do not
explain in detail the selection by color. In total our
simple example written in ROS needs about 250 LoC
C++ application code. Furthermore, the programmer
needs to know the internals of every module and how
they need to be combined.
In our DSL the order, dependencies, and error
handling code is totally hidden from the programmer.
We use an object-centered approach to describe the
manipulation of objects, as it is closer to a human-like
way describing tasks. If an ordinary programming
language is used, all robot configurations and move-
ments need to the specified in detail by the program-
mer. Thus, he must have the knowledge about the spe-
cific hardware, path, grasp and placement planning. If
a robotic framework like ROS is used, the program-
mer has the opportunity to use predefined planners.
What remains is that the programmer needs system
knowledge. So in both cases the programmer needs
to be an expert for robotic in an appropriate manner.
4 RELATED WORK
In (Ingl
´
es-Romero et al., 2012), the authors present
an approach which uses a DSL to handle run-time
variability in programs for service robots. The ap-
ICSOFT2013-8thInternationalJointConferenceonSoftwareTechnologies
552

proach presented by Ingl
´
es-Romero et al. aims to sup-
port developers of robotic systems (e.g. experts in the
robotics domain) while our approach has the goal to
enable individuals without dedicated backgrgound in
robotics to specify programs for robots. Furthermore,
the DSL is only able to express variability informa-
tion. It is not possible to specify the behavior of the
robot.
Steck et al. present an approach (Steck et al.,
2009) that is dedicated to a model-driven develop-
ment process of robotic systems. They present an
environment called SmartSoft (Steck and Schlegel,
2010) which provides a component based approach
to develop robotics software. The SmartSoft environ-
ment is based on Eclipse and the Eclipse Modeling
Project
4
. It uses Papyrus
5
for UML modeling. By us-
ing a model-driven approach, the authors focus on a
strict separation of roles throughout the whole devel-
opment life-cycle. Again, experts in the robotics do-
main are addressed with this approach while our ap-
proach doesn’t required expert knowledge in robotics.
RobotML (Dhouib et al., 2012), a modeling lan-
guage for robot programs also aims to provide model-
driven engineering capabilities for the domain of
robot programming. RobotML is an extension to the
Eclipse-based UML modeling tool Papyrus. Papyrus
puts strong emphasis on UML’s profile mechanism,
which allows domain-specific adaptations. RobotML
provides code generators for different target plat-
forms, like Orocos, RTMaps, Arrocam or Blender/-
Morse. The approach presented by Dhouib et al. ad-
dresses developers of robot programs or algorithms,
while our approach is targeted towards regular pro-
grammers or even end users instead.
Bubeck et al. present in (Bubeck et al., 2012)
an overview about best practices for system integra-
tion and distributed software development in service
robotics. Furthermore, the authors develop BRIDE
6
,
a graphical DSL for ROS developers. Using BRIDE,
new ROS nodes or ROS-based systems can be spec-
ified in a graphical way and corresponding C++ or
Python code may be generated. In addition, the re-
quired launch files for the ROS environment including
the relevant parameters and dependencies are gener-
ated as well, similar to the approach which we used
in our case study as described in section 3. Similar
to the approaches discussed above, BRIDE also ad-
dresses robot experts while our approach is targeted
towards end users or users that only required a back-
ground in programming rather than dedicated robotic
skills.
4
http://www.eclipse.org/modeling/
5
http://www.eclipse.org/papyrus
6
http://ros.org/wiki/bride
In (Schultz et al., 2007), Schultz et al. present
an approach for a domain-specific language intended
for programming self-configurable robots. The DSL
is targeted towards the ATRON self-reconfigurable
robot. Like all other approaches mentioned in this
section, it aims to provide a higher-level of abstrac-
tion for robot experts.
5 CONCLUSIONS AND FUTURE
WORK
In this paper we presented our approach towards easy
robot programming for personal robots. We demon-
strated the feasibility of our approach by presenting
the case study in which we implemented a domain-
specific language for pick and place operations on top
of the Robot Operating System (ROS).
The next steps are: (1) Transfering the pick and
place DSL from the Robot Simulation Framework
ROS to real robots by using our own robotics frame-
work. (2) Defining a DSL which also covers other
robotic application domains and (3) apply our soft-
ware product line approach to enable mass customiza-
tion of the DSL in order to adopt to specific customer
needs as well as specific hardware configurations.
We plan to evaluate our domain-specific language
in projects with undergraduate students who do not
have experienced programming skills. Furthermore,
we additionally plan to use our approach in co-
operative projects with high-schools.
REFERENCES
Baumgartl, J. and Henrich, D. (2012). Fast vision-based
grasp and delivery planning for unknown objects. vol-
ume 7th German Conference on Robotics (ROBOTIK
2012), Munich, Germany, May 21 - 22, 2012.
Bubeck, A., Weisshardt, F., Sing, T., Reiser, U., Hagele, M.,
and Verl, A. (2012). Implementing best practices for
systems integration and distributed software develop-
ment in service robotics - the care-o-bot robot family.
In System Integration (SII), 2012 IEEE/SICE Interna-
tional Symposium on, pages 609–614.
Buchmann, T. and Schw
¨
agerl, F. (2012). FAMILE: tool
support for evolving model-driven product lines. In
St
¨
orrle, H., Botterweck, G., Bourdells, M., Kolovos,
D., Paige, R., Roubtsova, E., Rubin, J., and Tolvanen,
J.-P., editors, Joint Proceedings of co-located Events
at the 8th European Conference on Modelling Foun-
dations and Applications, CEUR WS, pages 59–62,
Building 321, DK-2800 Kongens Lyngby. Technical
University of Denmark (DTU).
Clements, P. and Northrop, L. (2001). Software Prod-
uct Lines: Practices and Patterns. Addison-Wesley,
Boston, MA.
TowardsEasyRobotProgramming-UsingDSLs,CodeGeneratorsandSoftwareProductLines
553

Deiterding, J. and Henrich, D. (2007). Automatic adap-
tation of sensor-based robots. IEEE International
Conference on Intelligent Robots and Systems:1828–
1833.
Dhouib, S., Kchir, S., Stinckwich, S., Ziadi, T., and Ziane,
M. (2012). Robotml, a domain-specific language to
design, simulate and deploy robotic applications. In
Noda, I., Ando, N., Brugali, D., and Kuffner, J., edi-
tors, Simulation, Modeling, and Programming for Au-
tonomous Robots, volume 7628 of Lecture Notes in
Computer Science, pages 149–160. Springer Berlin
Heidelberg.
Frankel, D. S. (2003). Model Driven Architecture: Apply-
ing MDA to Enterprise Computing. Wiley Publishing,
Indianapolis, IN.
Gecks, T. and Henrich, D. (2009). Sensor-based online
planning of time-optimized paths in dynamic envi-
ronments. GWR09 German Workshop on Robotics,
Braunschweig, Germany.
Ingl
´
es-Romero, J. F., Lotz, A., Chicote, C. V., and Schlegel,
C. (2012). Dealing with Run-Time Variability in Ser-
vice Robotics: Towards a DSL for Non-Functional
Properties. In Menegatti, E., editor, Proceedings of the
3rd International Workshop on Domain-Specific Lan-
guages and models for ROBotic systems (DSLRob-12,
co-located with SIMPAR 2012), Tsukuba, Japan.
Kang, K. C., Cohen, S. G., Hess, J. A., Novak, W. E.,
and Peterson, A. S. (1990). Feature-oriented do-
main analysis (FODA) feasibility study. Technical Re-
port CMU/SEI-90-TR-21, Carnegie-Mellon Univer-
sity, Software Engineering Institute.
OMG (2008). MOF Model to Text Transformation
Language, Version 1.0. OMG, Needham, MA,
formal/2008-01 edition.
OMG (2012). Object Constraint Language. Object Man-
agement Group, Needham, MA, formal/2012-01-01
edition.
Pohl, K., B
¨
ockle, G., and van der Linden, F. (2005). Soft-
ware Product Line Engineering: Foundations, Prin-
ciples and Techniques. Springer Verlag, Berlin, Ger-
many.
Schultz, U. P., Christensen, D. J., and Stoy, K. (2007).
A Domain-Specific Language for Programming Self-
Reconfigurable Robots. In Workshop on Auto-
matic Program Generation for Embedded Systems
(APGES), pages 28–36.
Steck, A. and Schlegel, C. (2010). Towards Quality of Ser-
vice and Resource Aware Robotic Systems through
Model-Driven Software Development. In Proceed-
ings of the First International Workshop on Domain-
Specific Languages and models for ROBotic systems
(IROS - DSLRob), Taipei, Taiwan.
Steck, A., Stampfer, D., and Schlegel, C. (2009). Modell-
getriebene Softwareentwicklung f
¨
ur Robotiksysteme.
In Dillmann, R., Beyerer, J., Stiller, C., Z
¨
ollner, J. M.,
and Gindele, T., editors, AMS, Informatik Aktuell,
pages 241–248. Springer.
Steinberg, D., Budinsky, F., Paternostro, M., and Merks,
E. (2009). EMF Eclipse Modeling Framework. The
Eclipse Series. Addison-Wesley, Boston, MA, 2nd
edition.
V
¨
olter, M., Stahl, T., Bettin, J., Haase, A., and Helsen, S.
(2006). Model-Driven Software Development: Tech-
nology, Engineering, Management. John Wiley &
Sons.
Weiss, D. M. and Lai, C. T. R. (1999). Software Product
Line Engineering: A Family-Based Software Devel-
opment Process. Addison-Wesley, Boston, MA.
Wyrobek, K. A., Berger, E. H., der Loos, H. F. M. V., and
Salisbury, J. K. (2008). Towards a personal robotics
development platform: Rationale and design of an in-
trinsically safe personal robot. In ICRA, pages 2165–
2170. IEEE.
ICSOFT2013-8thInternationalJointConferenceonSoftwareTechnologies
554
