
On the Impact of Concurrency for the Enforcement of
Entailment Constraints in Process-driven SOAs
Thomas Quirchmayr and Mark Strembeck
Institute for Information Systems, New Media Lab, WU Vienna, Vienna, Austria
Abstract. Entailment constraints, such as mutual exclusion or binding constraints,
are an important means to specify and enforce business processes. However, the
inherent concurrency of a distributed system may lead to omission. Such failures
impact the enforcement of entailment constraints in a process-driven SOA. In par-
ticular, the impact of these failures as well as the corresponding countermeasures
depend on the architecture of the respective process engine. In this paper, we dis-
cuss the impact of omission failures on the enforcement of entailment constraints
in process-driven SOAs. In this context, we especially consider if the respective
process engine acts as an orchestration engine or as a choreography engine.
1 Introduction
A process-driven SOA (see, e.g., [6]) is specifically built to support the definition, the
execution, and monitoring of intra-organizational or cross-organizational business pro-
cesses. In order to control and coordinate the services in a process-driven SOA, we have
to ensure that the execution of the different services adheres to the process flow defined
via the corresponding business process. In this context, a process engine is a software
component that is able to control the process flow in a process-driven SOA.
In general, two architectural options for such process engines exist (see, e.g., [2,
10, 11]). An orchestration engine acts as a central coordinator that communicates with
different services and controls the process flow. If we use an orchestration engine, the
services usually have no knowledge about their involvement in one or more business
processes. In contrast, service choreography relies on collaborating choreography en-
gines. Each of these choreography engines controls a certain part of the business pro-
cess (e.g. a certain sub-process). Thus, in order to execute an entire business process the
different choreography engines (and thereby the services controlled via these choreog-
raphy engines) need to be aware of their involvement into a larger process (to a certain
degree).
1.1 Task-based Entailment Constraints
In a business process context, a task-based entailment constraint places some restriction
on the subjects who can perform a task x given that a certain subject has performed
another task y (see Figure 1 and 2). Entailment constraints are an important means
to assist the specification and enforcement of business processes. Mutual exclusion and
binding constraints are typical examples of entailment constraints (see, e.g., [4, 12, 15]).
Quirchmayr T. and Strembeck M..
On the Impact of Concurrency for the Enforcement of Entailment Constraints in Process-driven SOAs.
DOI: 10.5220/0004601600340043
In Proceedings of the 10th International Workshop on Security in Information Systems (WOSIS-2013), pages 34-43
ISBN: 978-989-8565-64-8
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
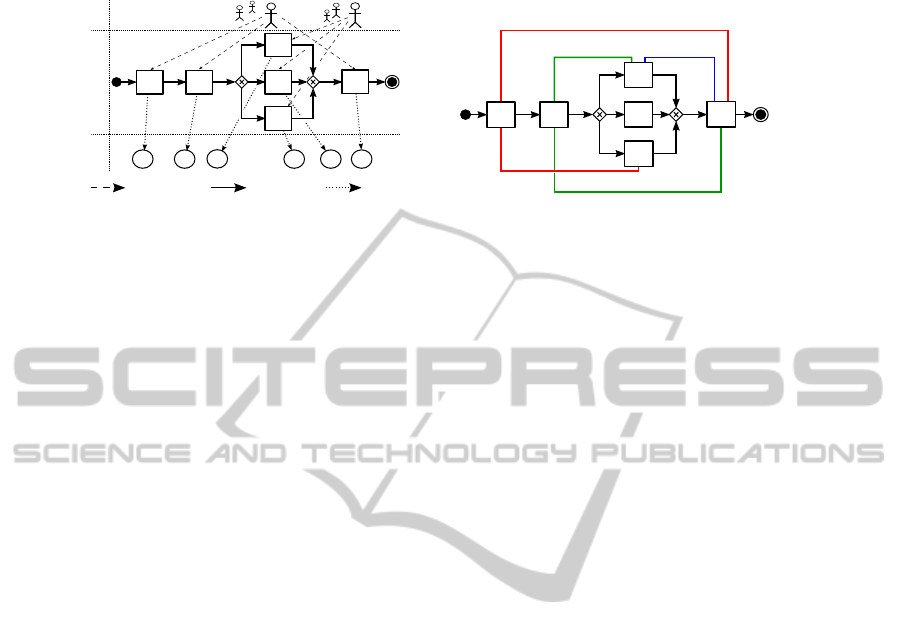
Business Process
User
S
a
Services
S
b
S
c
S
d
S
e
S
1
S
2
t
a
t
f
t
c
t
e
t
b
t
d
S
f
Execute BP flow Invoke
Fig. 1. Business Process Example in a SOA.
SB
DME
RB
2
RB
1
t
a
t
f
t
c
t
e
t
b
RB
3
t
d
Fig. 2. Exemplary Entailment Constraints.
Mutual exclusion constraints can be subdivided into static mutual exclusion (SME)
and dynamic mutual exclusion (DME) constraints. A SME constraint defines that two
tasks (e.g. ’Order Supplies’ and ’Approve Payment’) must never be assigned to the same
role and must never be performed by the same subject (to prevent fraud and abuse). A
DME constraint is enforced at the instance-level by defining that two tasks must never
be performed by the same subject in the same process instance. In contrast to mutual ex-
clusion constraints, binding constraints define that two bound tasks must be performed
by the same entity. In particular, a subject-binding (SB) constraint defines that the same
individual who performed the first task must also perform the bound task(s). Similarly,
a role-binding (RB) constraint defines that bound tasks must be performed by members
of the same role but not necessarily by the same individual.
Most often, entailment constraint are defined in the context of a corresponding ac-
cess control model. Process-related RBAC models define entailment constraints and
corresponding access control polices in a business process context (see, e.g., [3, 13,
15]). In a process-driven SOA, the respective process engine must ensure the consis-
tency of process-related RBAC models (see, e.g., [8]).
1.2 Motivation
In a process-driven SOA (see [6]), the allocation of tasks to subjects requires that the
process engine and the services exchange corresponding messages. However, in a dis-
tributed system (see, e.g., [5]) omission failures may occur that impede the message
exchange and thereby the enforcement of the entailment constraints. An omission fail-
ure occurs, if either a message is lost (e.g. due to a network failure) or if a machine
crashes. In this context, orchestration engines and choreography engines apply different
strategies to deal with such failures and to ensure the correct enforcement of entailment
constraints.
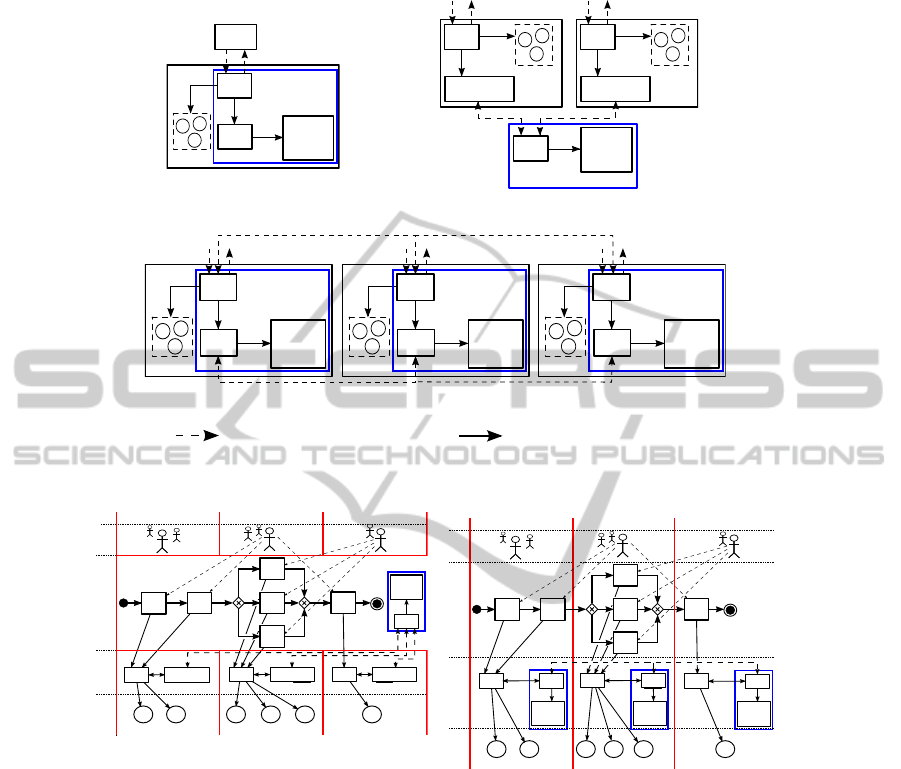
2 Architectural Options for Enforcing Entailment Constraints
Figure 3 shows three basic options to enforce access control policies and entailment
constraints in a process-driven SOA. Figure 3(a) shows the most simple option where
the process engine and all services (in Figure 3 (Web) services are indicated by circles
including a capital “S”) that are controlled via this process engine are located at the
35
Client
PEP
PDP
RBAC
Policy
Repository
use
S
invoke
server
response
client
request
Process
Engine
Domain
S
S
(a) Local Process Engine
PEP
PDP Stub
S
S
a
S
b
invoke
PEP
PDP Stub
S
S
c
S
d
invoke
PDP
use
Orchestration Engine
Domain
x
Domain
y
server
response
client
request
server
response
client
request
RBAC
Policy
Repository
(b) Orchestration Engine
PEP
PDP
RBAC
Policy
Repository
use
S
S
a
invoke
server
response
client
request
Choreography
Engine
x
S
b
Domain
x
RBAC
Policy
Repository
use
S
S
c
invoke
server
response
client
request
Choreography
Engine
y
S
d
Domain
y
PEP
PDP
RBAC
Policy
Repository
use
S
S
e
invoke
server
response
client
request
Choreography
Engine
z
Domain
z
PEP
PDP
S
(c) Choreography Engines
inter-domain communication
intra-domain communication
Fig. 3. Three architectural options to enforce access control policies and constraints in a SOA.
Orchestration Engine
+ Access Control
UserServices
t
x
PEP
t
x
PDP Stub
PEP
t
x
PEP
t
x
PDP Stub
t
x
PEP
t
x
PDP Stub
RBAC
Policy
Repository
t
x
PDP
S
a
S
b
S
c
S
d
S
e
Domain
x
Domain
y
Domain
z
S
1
S
2
t
a
t
f
t
c
t
e
t
b
t
d
S
f
(a) Distributed Business Process
Example with an Orchestration Engine
Choreography
Engines
UserServices
S
a
S
b
S
c
S
d
S
e
Domain
x
Domain
y
Domain
z
S
1
S
2
t
a
t
f
t
c
t
e
t
b
t
d
S
f
t
x
PEP
t
x
PDP
RBAC
Policy
Repository
t
x
PEP
t
x
PDP
RBAC
Policy
Repository
t
x
PEP
t
x
PDP
RBAC
Policy
Repository
PEP + Access
Control
(b) Distributed Business Process
Example with Choreography Engines
Fig. 4. Business Process Examples in a SOA based on different Process Engines.
same physical machine. This configuration has the advantage that the messages that
need to be exchanged between the process engine and the services do not have to travel
over a network. Furthermore, because all messages are exchanged on a single machine
it is straightforward to maintain a local history log of all task allocations and access
control decisions. However, in an actual SOA such a localized architecture is most often
not a viable option (see, e.g., [6, 7]). Thus, Figures 3(b) and 3(c) sketch the architectures
resulting from the use of an orchestration engine or interacting choreography engines
respectively. Both options demand the exchange of messages over a network (in Figure
3 messages sent over a network are indicated by dashed lines).
36

3 Maintaining Task-allocation Histories in Process-driven SOAs
Figure 4(a) shows that the allocation of t
a
i
requires an allocation-request sent from the
orchestration engine (OE) to Domain x (D
x
) which hosts the corresponding service S
a
.
In a choreography engines architecture the tasks are allocated locally (see Figure 4(b)).
Additionally, to allocate tasks in process-driven SOAs to corresponding entailment con-
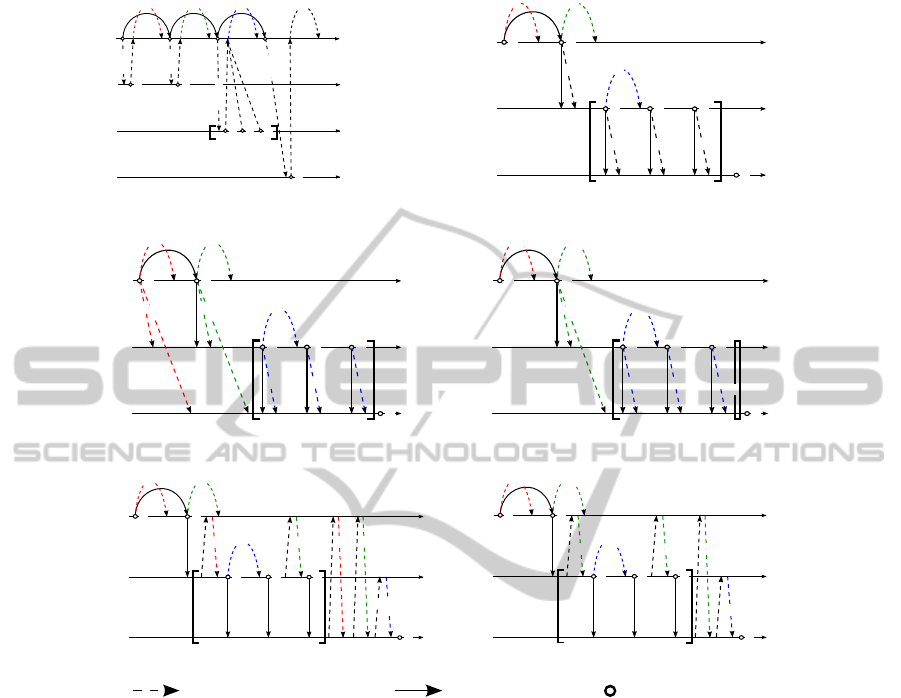
straints, each process engine at least needs to know certain parts of the process history.
Figure 5 shows different communication schemes of entities participating in the dis-
tributed example business process from Figure 1. It illustrates the process flow and the
message exchange that is necessary to allocate task instances at runtime. An orchestra-
tion engine controls the entire business process and thus can allocate the task instances
in accordance with the corresponding entailment constraints based on a central process
history (see Figure 5(a)).
1
. Maintaining history information in a choreography engines
architecture, on the other hand, is more complex as there does not exist a single history
at a central location (see Figures 5(b) to 5(f)). Different approaches can be applied to ob-
tain these information. First, it is possible to request the allocation information (which
subject, executing a specific role, is allocated to a specific task instance) from the cor-
responding process engine before a task instance is to be allocated (History Pull). The
second possibility is to send allocation information of task instances to certain process
engines ex ante (History Push).
Both approaches may operate at the task level (task-based), the process-engine level
(engine-based), or on a global level (cumulative). A Cumulative History Push (CU-PS)
communication scheme operates on a global level (i.e. it involves all choreography en-
gines in a process-driven SOA) and extends the history with each access decision and
task allocation. In a Task-based History Push (TB-PS) communication scheme a chore-
ography engine notifies the other engines as soon as a task is allocated to an executing-
subject. In an Engine-based History Push (EB-PS) communication scheme the history
push takes place when the process flow is passed from one choreography engine to
another. In a Task-based History Pull (TB-PL) communication scheme a choreography
engine performs and on demand requests (pull) for the execution history of a particular
task.In a Engine-based History Pull (TB-PL) communication scheme a choreography
engine requests the entire execution history from another choreography engine (i.e. the
history of all corresponding task instances).
4 Omission Failures
4.1 Lost Request or Lost Reply Messages
Depending on the process history scheme (see Section 3) a lost message may have
different consequences on task allocation procedures (see Figures 6 to 8). Figure 6
shows lost messages in context of an orchestration engine architecture. The request
from the orchestration engine to allocate a specific task to a subject or the response of
the service domain D
x
may get lost. However, without confirming a task allocation the
1
The square brackets in Figure 5(a) to 5(f) encompassing the task instances t
c
i
, t
d
i
and t
e
i
indicate, that exactly one of them has to be allocated (see also Figures 1, 2 and 4).
37
D
y
D
z
t
t
D
x
t
t
a
i
t
b
i
t
c
i
t
d
i
t
e
i
t
f
i
OE
t
h
g
h'
g
h''
g
h'''
g
alloc t
a
i
alloc t
b
i
alloc t
c/d/e
i
alloc t
f
i
(a) Orchestration Engine
CE
y
CE
z
t
t
CE
x
t
t
a
i
t
b
i
t
c
i
t
d
i
t
e
i
t
f
i
h
g
h'
g
h'
g
h''
g
h''
g
h''
g
h''
g
(b) Choreography Engines - CU-PS
CE
y
CE
z
t
t
CE
x
t
t
a
i
t
b
i
t
c
i
t
d
i
t
e
i
t
f
i
h
t
a
i
h
t
b
i
h
t
c
i
h
t
c
i
h
t
b
i
h
t
a
i
h
t
d
i
h
t
e
i
(c) Choreography Engines - TB-PS
CE
y
CE
z
t
t
CE
x
t
t
a
i
t
b
i
t
c
i
t
d
i
t
e
i
h
CE
x
h'
CE
x
h'
CE
x
h
CE
y
h
CE
y
t
f
i
h
CE
y
h
CE
y
(d) Choreography Engines - EB-PS
CE
y
CE
z
t
t
CE
x
t
h
t
a
i
t
a
i
t
b
i
t
c
i
t
f
i
t
d
i
t
e
i
h
t
b
i
h
t
c
i
h
t
b
i
h
t
a
i
h
t
c
i
h
t
a
i
h
t
b
i
(e) Choreography Engine - TB-PL
CE
y
CE
z
t
t
CE
x
t
t
a
i
t
b
i
t
c
i
t
f
i
t
d
i
t
e
i
h
CE
x
h'
CE
x
h'
CE
x
h'
CE
x
h
CE
y
h'
CE
x
h
CE
y
(f) Choreography Engines - EB-PL
History Message BP Flow Task Allocation
OE ... Orchestration Engine CE ... Choreography Engine D ... Domain
h ... History
Fig. 5. History Management in Process-driven SOAs related to Figures 1, 2, and 4.
entire business process flow cannot be continued, because the allocation of subsequent
tasks may depend on the respective process history (see Section 3).
In a choreography engines architecture the main problem is the exchange of the
process history between the choreography engines. If a choreography engine cannot
access the process history, it cannot allocate tasks that must adhere to entailment con-
strains. Figures 7(a) and 7(b) sketch the loss of a task-based respectively engine-based
history push (indicated as h
t
b
i
and h
0
CE
x
respectively). Figure 7(c) shows the loss of a
cumulative history push stopping the entire business process (see Sections 1.1 and 3).
Figure 8 shows lost allocation history request and response messages based on task-
based and engine-based history pull. If a history request (see Fig. 8(a)) or the respective
response (see Figure 8(b)) is lost, the entire business process may stop – which means
that all tasks that have a binding or a mutual exclusion constraint to preceding tasks,
cannot be allocated.
38

OE
t
D
x
t
alloc
t
a
i
(a) Lost Request
OE
t
D
x
t
alloc
t
a
i
t
a
i
ok
(b) Lost Response
Fig. 6. Orchestration Engine Message Loss.
CE
x
t
CE
y
t
t
a
i
t
b
i
t
c
i
h
t
b
i
h
t
a
i
h
t
a
i
h
t
b
i
(a) Lost Notification
task-based
CE
x
t
CE
y
t
t
a
i
t
b
i
t
c
i
h
CE
x
h'
CE
x
h'
CE
x
(b) Lost Notification
engine-based
CE
x
t
CE
y
t
t
a
i
t
b
i
h'
g
h
g
h'
g
t
c
i
(c) Lost Notification
cumulative
Fig. 7. Choreography Engines Message Loss (History Push).
CE
x
t
CE
y
t
t
c
i
t
b
i
req
h'
CE
x
h'
CE
x
(a) Lost Request
engine-based
CE
x
t
CE
y
t
t
b
i
t
c
i
h'
CE
x
req
h'
CE
x
h'
CE
x
(b) Lost Response
engine-based
CE
x
t
CE
y
t
t
c
i
t
b
i
req h
t
b
i
h
t
b
i
(c) Lost Request
task-based
CE
x
t
CE
y
t
t
b
i
t
c
i
h
t
b
i
h
t
b
i
req h
t
b
i
(d) Lost Response
task-based
History Message BP Flow Task Allocation
OE ... Orchestration Engine CE ... Choreography Engine D ... Domain
h ... History
Fig. 8. Choreography Engines Message Loss (History Pull).
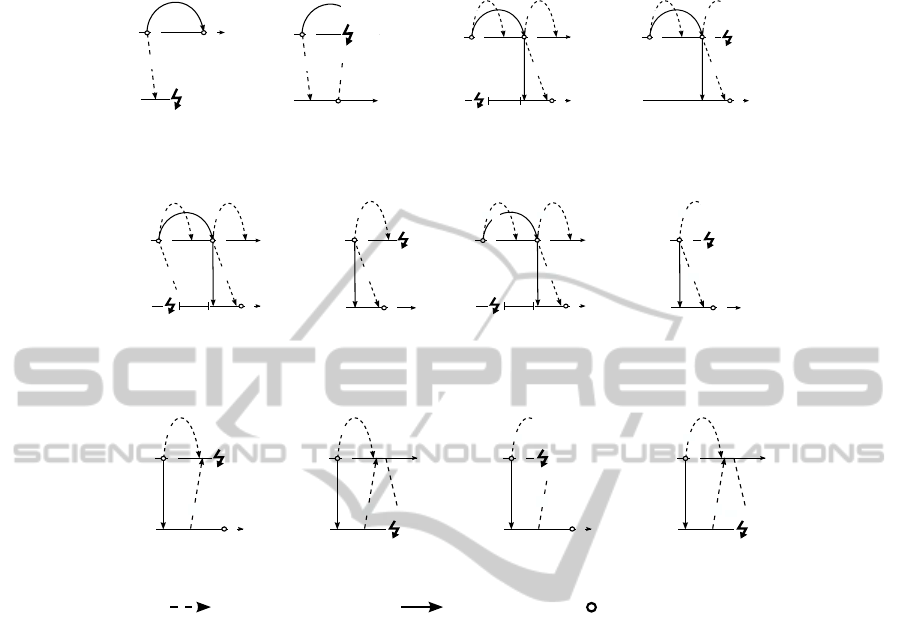
4.2 Sender and Receiver Crash
Figures 9(a) and 9(b) show the crash of a receiver in an orchestration engine architec-
ture. In particular, the crash occurs while trying to allocate a subject to task instance
t
a
i
. In both cases the allocation fails and the business process cannot be continued (cf.
Sections 1.1 and 3). Figures 10 and 11 depict crashes in a choreography engines archi-
tecture based on history push. Figures 10(b), 11(b) and 11(d) show that a sender crash
may not impact the allocation of subsequent tasks (as long as another choreography
engine controls the current business process flow) if the corresponding process history
was previously delivered from CE
x
to CE
y
. A receiver crash may lead to difficulties
(see Figures 10(a), 11(a) and 11(c). In particular, if the receiver (in the example: CE
y
)
is not able to recover (see, e.g., [5]) before the process flow is passed from CE
x
to
CE
y
, the process execution is stopped. On the other hand, if the receiver recovers in
time, it is possible to allocate t
e
i
if we use a cumulative or engine-based history push
scheme (see Section 3). In case of a task-based history push Figure 11(a) shows that
h
t
a
i
could not be delivered and thus t
e
i
may not be allocated.
A crash in a choreography engines architecture that uses history pull scheme may
also lead to task allocation problems. For example, in Figure 12(a) a crash of CE
x
may
39
OE
t
D
x
t
alloc
t
a
i
t
a
i
t
b
i
(a) Receiver Crash
OE
t
D
x
t
alloc
t
a
i
t
a
i
t
b
i
ok
(b) Receiver Crash
Fig. 9. Orchestration Engine.
CE
x
t
CE
y
t
t
a
i
t
b
i
recovery
h
g
h
g
'
h
g
'
t
e
i
(a) Receiver Crash
CE
x
t
CE
y
t
t
c
i
t
a
i
t
b
i
h
g
h
g
'
h
g
'
(b) Sender Crash
Fig. 10. Choreography Engines - Cumulative.
CE
x
t
CE
y
t
recovery
t
a
i
t
b
i
h
t
a
i
h
t
b
i
h
t
a
i
h
t
b
i
t
e
i
(a) Receiver Crashtask-based
CE
x
t
CE
y
t
t
b
i
h
t
b
i
h
t
b
i
t
c
i
(b) Sender Crash
task-based
CE
x
t
CE
y
t
recovery
t
a
i
t
b
i
t
e
i
h'
CE
x
h
CE
x
h'
CE
x
(c) Receiver Crash
engine-based
CE
x
t
CE
y
t
t
b
i
t
c
i
h'
CE
x
h'
CE
x
(d) Sender Crash
engine-based
Fig. 11. Choreography Engines - History Push.
CE
x
t
CE
y
t
t
b
i
t
c
i
req
h
t
b
i
h
t
b
i
(a) Receiver Crash
task-based
CE
x
t
CE
y
t
t
b
i
t
c
i
req
h
t
b
i
h
t
b
i
(b) Receiver Crash
task-based
CE
x
t
CE
y
t
t
b
i
t
c
i
h'
CE
x
req
h'
CE
x
(c) Sender Crash
engine-based
CE
x
t
CE
y
t
t
b
i
t
c
i
req
h'
CE
x
h'
CE
x
(d) Receiver Crash
engine-based
History Message BP Flow Task Allocation
OE ... Orchestration Engine CE ... Choreography Engine D ... Domain
h ... History
Fig. 12. Choreography Engines - History Pull.
interrupt the process flow because CE
y
cannot allocate t
c
i
without first receiving the
process history from CE
x
. In a similar way, the process flow is interrupted if CE
y
crashes after CE
x
has sent the process history (see Figures 12(b) and 12(d)). However,
in the example from Figure 12(c) CE
x
may crash after it sent the process history to
CE
y
– in such as scenario, the process flow will not be interrupted. As it is basically
neither possible for the receiver nor for the sender to clearly distinguish a crash from
lost messages it may be advantageous to establish a so called ”heartbeat” scheme (see,
e.g., [5]).
5 Discussion
A Task-Based History Push communication scheme requires one message (history) re-
spectively two messages (history and confirmation) for each constraining task at least.
Moreover, the payload of each message includes a single-task allocation record only.
Because process control is distributed and the allocation histories are sent in advance
for each constraining task, the impact of omission failures is small. Moreover, we re-
40

quire an ordering mechanism to ensure the correct submission of multicast messages
(see, e.g., [9]). A choreography engine multicasts its entire allocation history (multiple
task allocation records) to all choreography engines that control constrained tasks. In
this scheme, fewer messages are sent (one history and possibly a confirmation mes-
sage) but the payload increases (task allocation history of an entire choreography en-
gine). Also the impact of omission failures increases as the delivery of a history may
be more time-critical. Moreover, we require an ordering mechanism to ensure the cor-
rect submission of multicast messages. A Cumulative History Push scheme requires
the smallest number of messages to be sent. The history message contains all previous
task allocation records of the respective process. Because as single history is passed
between the choreography engines, its delivery is still more time-critical. However, as
multicasting is not necessary, we do not need to implement an ordering mechanism. In
the Task-Based History Pull scheme, the respective choreography engine has to request
the allocation history of the constraining task(s) before allocating a constrained task.
Similar to task-based history push the message size is small (a request respectively
a response consisting of a single task-allocation record). As the allocation of a con-
strained task heavily depends on the communication between choreography engines, an
omission failure may have significant effects. However, as multicasting is not necessary
there is no need to implement an ordering mechanism. In a Engine-Based History Pull
scheme, each choreography engine requests engine-based allocation histories when al-
locating its first constrained task. Similar to engine-based history push, the number of
messages decreases but their size increases compared to task-based history exchange.
Omission failures may delay task allocation for the allocation of the first constrained
task. However, as multicasting is not necessary there is no need to implement an or-
dering mechanism. In an Orchestration Engine the entire business process history is
maintained locally but it has to communicate with the different remote services. As
there is no need to exchange a history, the messages are allocation requests of small
size (a single request and a respective confirmation for each task to be allocated). An
orchestration engine architecture is most impacted by omission failures. In case the or-
chestration engine suffers a crash, the execution of the entire business process freezes.
Each crashed domain, hosting a task to be allocated next, also stops at least a part of the
business process from working. However, as multicasting is not necessary there is no
need to implement an ordering mechanism. In addition, the following three interrelated
determinants have to be considered in order to choose a proper process engine architec-
ture: the number of constrained tasks per business process (degree of constraint; DOC),
the number of participants in the business process (degree of distribution; DOD) and
the number of business process control transitions between different participants in a
business process instance (degree of networking; DON). According to these character-
istics and the corresponding performance categories, we can choose the approach that
best fits a particular SOA. For example, a business process with a high DOC, a high
DOD, and a high DON may best be handled with a choreography engines architecture
using an engine-based history push approach with confirmation. On the other hand, if
our focus is on minimized size of messages and minimal costs for implementing an
ordering mechanism, an orchestration engine architecture may be a better choice.
41

6 Related Work
Several approaches address the enforcement of entailment constraints during task allo-
cation. In [14], Tan et al. present an approach for constraint specification within a work-
flow authorization schema. Furthermore they define a set of consistency rules for con-
straints to prevent inconsistencies and ambiguities between constraints. Xu et al. [16]
consider concurrency in access control decisions through the development of XACML-
ARBAC, a language to resolve the concurrency problem. However, they focus on the
administration of session-aware RBAC models and do not discuss the problems of en-
forcing entailment constraints in a distributed environment. In particular, they assume
fail-save participants and processes, reliable communication, as well as a centralized
workflow coordinator. Ayed et al. [1] discuss the deployment of workflow security poli-
cies for inter-organizational workflow. However, the approach also assumes fail-save
hard- and software. Our work is complementary as it discusses the enforcement of en-
tailment constraints in distributed systems at runtime considering omission failures. In
particular, we consider omission failures that may occur in a process-driven SOA.
7 Conclusions
In this paper, we discussed the impact of omission failures on the enforcement of en-
tailment constraints in process-driven SOAs. Because the enforcement of entailment
constraints relies on the availability of a process history, we observe different history
schemes and examine the impact of failures on architectures that use an orchestration
engine or choreography engines respectively. This paper was inspired by our work on
the specification and enforcement of entailment constraints in business processes (see,
e.g., [8, 12, 13]) and the implementation of a corresponding runtime engine
2
. In recent
years, we see an increasing interest in process-aware information systems in both re-
search and practice. In this context, an increasing number of existing and future systems
will have to be extended with respective consistency checks. The discussion from this
paper can help to address the challenges that result from the deployment of a process
engine in a distributed system.
References
1. S. Ayed, N. Cuppens-Boulahia, and F. Cuppens. Deploying security policy in intra and inter
workflow management systems. 2012 Seventh International Conference on Availability,
Reliability and Security, 0:58–65, 2009.
2. A. Barker, C. D. Walton, and D. Robertson. Choreographing web services. IEEE Transac-
tions on Services Computing, 2(2):152–166, 2009.
3. E. Bertino, E. Ferrari, and V. Atluri. The specification and enforcement of authorization con-
straints in workflow management systems. ACM Transactions on Information and System
Security, 2(1):65–104, Feb. 1999.
4. F. Casati, S. Castano, and M. Fugini. Managing workflow authorization constraints through
active database technology. Information Systems Frontiers, 3(3):319–338, Sep 2001.
2
available from: http://wi.wu.ac.at/home/mark/BusinessActivities/library.html
42

5. G. Coulouris, J. Dollimore, T. Kindberg, and G. Blair. Distributed Systems: Concepts and
Design (5th Edition). Addison Wesley, May 2011.
6. C. Hentrich and U. Zdun. Process-Driven SOA: Patterns for Aligning Business and IT. CRC
Press, Taylor and Francis, 2012.
7. M. N. Huhns and M. P. Singh. Service-oriented computing: Key concepts and principles.
IEEE Internet Computing, 9(1):75–81, Jan. 2005.
8. W. Hummer, P. Gaubatz, M. Strembeck, U. Zdun, and S. Dustdar. An integrated approach
for identity and access management in a SOA context. In Proceedings of the 16th ACM
Symposium on Access Control Models and Technologies, SACMAT ’11, USA, 2011.
9. L. Lamport. Time, clocks, and the ordering of events in a distributed system. Communica-
tion of ACM, 21(7):558–565, July 1978.
10. N. Milanovic and M. Malek. Current solutions for web service composition. IEEE Internet
Computing, 8(6):51–59, Nov. 2004.
11. C. Peltz. Web services orchestration and choreography. IEEE Computer, 36(10), 2003.
12. M. Strembeck and J. Mendling. Generic algorithms for consistency checking of mutual-
exclusion and binding constraints in a business process context. In Proceedings of the 18th
International Conference on Cooperative Information Systems (CoopIS), volume 6426 of
Lecture Notes in Computer Science (LNCS), pages 204–221, 2010.
13. M. Strembeck and J. Mendling. Modeling process-related RBAC models with extended
UML activity models. Information & Software Technology, 53(5):456–483, 2011.
14. K. Tan, J. Crampton, and C. A. Gunter. The consistency of task-based authorization con-
straints in workflow systems. In Proceedings of the 17th IEEE Workshop on Computer
Security Foundations, CSFW ’04, pages 155–170, USA, 2004.
15. J. Wainer, P. Barthelmess, and A. Kumar. W-RBAC - a workflow security model incorporat-
ing controlled overriding of constraints. International Journal of Cooperative Information
Systems, 12:2003, 2003.
16. M. Xu, D. Wijesekera, X. Zhang, and D. Cooray. Towards session-aware RBAC admin-
istration and enforcement with XACML. In Proceedings of the 10th IEEE International
Conference on Policies for Distributed Systems and Networks, POLICY’09, USA, 2009.
43
