
Artificial Curiosity Emerging Human-like Behaviour
A Fundation for Fully Autonomous Cognitive Machines
Dominik Maximilián Ramík, Kurosh Madani and Christophe Sabourin
LISSI Lab. / EA 3956, Sénart-FB Institute of Technology, University Paris-Est Créteil (UPEC),
Campus de Senart, 36-37 rue Georges Charpak, F-77127 Lieusaint, France
Keywords: Artificial Curiosity, Cognitive Machines, Perceptual Curiosity, Epistemic Curiosity, Semantic Knowledge,
Learning-by-Interaction, Learning-by-Observation.
Abstract: This paper is devoted to autonomous cognitive machines by mean of the design of an artificial curiosity
based cognitive system for autonomous high-level knowledge acquisition from visual information. Playing a
chief role as well in visual attention as in interactive high-level knowledge construction, the artificial
curiosity (e.g. perceptual and epistemic curiosities) is realized through combining visual saliency detection
and Machine-Learning based approaches. Experimental results validating the deployment of the
investigated system have been obtained using a humanoid robot acquiring visually knowledge about its
surrounding environment interacting with a human tutor. As show the reported results and experiments, the
proposed cognitive system allows the machine to discover autonomously the surrounding world in which it
may evolve, to learn new knowledge about it and to describe it using human-like natural utterances.
1 INTRODUCTION
Emergence of cognitive phenomena in machines
have been and remain active part of research efforts
since the rise of Artificial Intelligence (AI) in the
middle of the last century, but the fact that human-
like machine-cognition is still beyond the reach of
contemporary science only proves how difficult the
problem is. In fact, if nowadays there are many
systems, such as sensors, computers or robotic
bodies, that outperform human capacities,
nonetheless, none of existing machines or robotic
bodies can be called truly intelligent. In other words,
machines sharing everyday life with humans are still
far away. Somewhat, it is due to the fact that we are
still far from fully understanding the human
cognitive system. Partly, it is so because if
contemporary machines are often fully automatic,
they linger rarely fully autonomous in their
knowledge acquisition. Nevertheless, the concepts of
bio-inspired or human-like machine-cognition
remain foremost sources of inspiration for achieving
intelligent systems (intelligent machines, intelligent
robots, etc…). This is the slant we have taken (e.g.
through inspiration from biological and human
mechanisms) to investigate the design of a human-
like machine-cognition based system able to acquire
high-level semantic knowledge from perceptual
(namely visual) information. Our main source of
inspiration has been the “human’s curiosity”
intellectual process for discovering the surrounding
world or acquiring new knowledge about it.
It is important to emphasize that the term
“cognitive system” means here that characteristics of
such a system tend to those of human’s cognitive
system. This means that a cognitive system, which is
supposed to be able to comprehend the surrounding
world on its own, but whose comprehension would
be non-human, would afterward be incompetent of
communicating about it with its human counterparts.
In fact, human-inspired knowledge representation
and human-like communication (namely semantic)
about the acquired knowledge become key points
expected from such a system. To achieve the
aforementioned capabilities such a cognitive system
should thus be able to develop its own high-level
representation of facts from low level visual
information (such as image). Accordingly to
expected autonomy, the processing from the
“sensory level” to the “semantic level” should be
performed solely by the robot, without human
supervision. However, this does not mean excluding
interaction with human, which is, on the contrary,
vital for any cognitive system, be it human or
407
Maximilián Ramík D., Madani K. and Sabourin C..
Artificial Curiosity Emerging Human-like Behaviour - A Fundation for Fully Autonomous Cognitive Machines.
DOI: 10.5220/0004628604070419
In Proceedings of the 5th International Joint Conference on Computational Intelligence (NCTA-2013), pages 407-419
ISBN: 978-989-8565-77-8
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

machine. Thus the investigated system shares its
perceptual high-level knowledge of the world with a
human tutor by interacting with him. The tutor on
his turn shares with the cognitive robot his
knowledge about the world by in natural speech
(utterances) completing observations made by the
robot.
Curiosity is indeed a foremost mechanism among
key skills for human cognition. It may play the role
of an appealing source for conceiving artificial
systems that gather knowledge autonomously. We
will devote a discussion on this purpose further in
this paper. Nevertheless, we have taken into
consideration this enticing cognitive skill making it
our principle foundation in investigated concept. The
present paper is devoted to the description of a
cognitive system based on artificial curiosity for
high-level knowledge acquisition from visual
information. The goal of the investigated system is
to allow the machine (such as a humanoid robot) to
anchor the heard terms to its visual information and
to flexibly shape this association according to its
budding knowledge about the observed items within
its surrounding world. In other words, the presented
system allows the machine to observe, to learn and
to interpret the world in which it evolves, using
appropriate terms from human language, while not
making use of a priori knowledge. This is done by
word-meaning anchoring based on learning by
observation stimulated (steered) by artificial
curiosity and by interaction with the human tutor.
Our model is closely inspired by juvenile learning
behaviour of human infants (Yu, 2005),
(Waxman,2009). By analogy with natural curiosity
the artificial curiosity has been founded on two
cognitive levels. The first ahead of reflexive visual
attention plays the role of perceptual curiosity and
the second coping with intentional learning-by-
interaction undertakes the role of epistemic
curiosity.
The present paper is further organized as follow.
Next section is dedicated to a brief overview of
existing techniques in autonomous learning and
knowledge acquisition, especially in robotics
systems. Section three elucidates theoretical aspects
of the investigated cognitive system. Section four
briefly runs through perceptual curiosity, relying on
our previously published works on salient vision.
Section five details the higher-level cognitive layer
and provides its validation. Section six provides
details about deployment of the system on a
humanoid robot in real world conditions. Finally a
conclusion and a perspective on future directions
close this paper.
2 BRIEF OVERVIEW
OF RELATED WORKS
Before running through a brief synopsis of already
accomplished works and available techniques
relating the purpose of this paper, it is pertinent to
note that the cognition and related aspect cover an
extremely extensive spectrum of competencies and
regroup a huge hoard of multi-disciplinary works.
Thus, it is neither the purpose of this section nor our
intent to fully overview the colossal amount of
research works linking different parts of the
presented work. That is why, in this section we will
focus on research efforts that have played, in some
way, an influential role for achieving the presented
work or on those closely related to its subject. We
therefore focus on cognitive systems, perceptual
curiosity (notably visual saliency) and on works
concerning knowledge acquisition.
In the present work the term “cognition” is
considered as human-like knowledge based
functionality of machines. A machine (or a robot)
responding correctly to such challenge cannot rely
only on a priori knowledge that has been stored in it,
but should be able to learn on-line from environment
where it evolves by interaction with the people it
encounters in that environment. On this subject, the
reader may refer to (Kuhn et al., 1995), a monograph
on knowledge acquisition strategies and to
(Goodrich and Schultz, 2007) giving a survey on
human-robot interaction and learning and to
(Coradeschi and Saffiotti, 2003) providing an
overview of the anchoring problem. In (Madani and
Sabourin, 2011), a multi-level cognitive machine-
learning based concept for human-like “artificial”
walking is proposed. Authors define two kinds of
cognitive functions: the “unconscious cognitive
functions” (UCF), identified as “instinctive”
cognition level handling reflexive abilities, and
“conscious cognitive functions” (CCF),
distinguished as “intentional” cognition level
handling thought-out abilities. In (Madani, 2012)
authors focus the concept of Artificial Awareness
based on visual saliency with application to
humanoid robot's awareness.
The autonomous learning benefiting from
interaction with humans will inherently require the
machine’s ability of learning without explicit
“negative training set” (or negative evidence) and
from a relatively small number of samples. This
important capacity is observed in children learning
the language and is discussed in (Bowerman, 1983).
The problem of autonomous learning has been
addressed on different degrees in several works. For
IJCCI2013-InternationalJointConferenceonComputationalIntelligence
408
example, in (Greeff et al., 2009) a computational
model of word-meaning acquisition by interaction is
presented. In (Saunders, 2010) a humanoid robot is
taught by a human tutor to associate simple shapes
to human lexicon in an interactive way. A more
advanced work on autonomous robot learning using
a weak form of interaction with the tutor has been
recently presented in (Araki et al., 2011). Another
interesting approach to autonomous learning of
visual concepts in robots has been published in
(Skocaj et al., 2011). Authors show capacity of their
robotic platform to engage in different kinds of
learning in interaction with a human tutor.
Concerning the use of curiosity in machine-
cognition, by observing the state of the art it may be
concluded that the curiosity is usually used as an
auxiliary, single-purpose mechanism, instead of
being the fundamental basis of the knowledge
acquisition. In (Ogino et al., 2006), a lexical
acquisition model is presented combining more
traditional approaches with the concept of curiosity
to alternate the attention of the learning robot. To
our best knowledge there is no work to date which
considers curiosity in context of machine cognition
as a drive for knowledge acquisition on both low
(perceptual) level and high (“semantic”) level of the
system, as it is described in this chapter.
Visual saliency (also referred in literature as
visual attention, unpredictability or surprise) is
described as a perceptual quality that makes a region
of image stand out relative to its surroundings and to
capture attention of observer (Achanta et al., 2009).
The inspiration for the concept of visual saliency
comes from the functioning of early processing
stages of human vision system and is roughly based
on previous clinical research. In early stages of the
visual stimulus processing, human vision system
first focuses in an unconscious, bottom-up manner,
on visually attractive regions of the perceived image.
The visual attractiveness may encompass features
like intensity, contrast and motion. Although there
exist solely biologically based approaches to visual
saliency computation, most of the existing works do
not claim to be biologically plausible. Instead, they
use purely computational techniques to achieve the
goal. One of the first works using visual saliency in
image processing has been published by (Itti et al.,
1998). Authors use a biologically plausible approach
based on a centre-surround contrast calculation
using Difference of Gaussians. Published more
recently, other common techniques of visual
saliency calculation include graph-based random
walk (Harel et al., 2007), centre-surround feature
distances (Achanta et al., 2008), multi-scale contrast,
centre-surround histogram and color spatial
distribution or features of color and luminance (Liu,
2008). A less common approach is described in
(Liang et al., 2012). It uses content-sensitive hyper-
graph representation and partitioning instead of
using more traditional fixed features and parameters
for all images.
3 CURIOSITY BASED
ARTIFICIAL INTELLECT
3.1 Concept and Role of Artificial
Curiosity
As it has already been mentioned, “curiosity” is a
key skill in human cognitive ability for acquiring
knowledge. Thus it is an appealing concept in
conceiving artificial systems supposed to gather
knowledge autonomously. So, before exposing the
investigated system let us focus on curiosity in more
depth.
Berlyne (Berlyne, 1954) addresses the concept of
human’s curiosity by splitting up the curiosity into
two kinds. The first, so-called “perceptual curiosity”,
leads to increased perception of stimuli. It is a lower
level function, relating perception of new, surprising
or unusual sensory inputs. It contrasts to repetitive or
monotonous perceptual experience. The other one,
so called “epistemic curiosity”, is related to the
desire for knowledge that motivates individuals to
learn new ideas, to eliminate information-gaps, and
to solve intellectual problems (Litman, 2008).
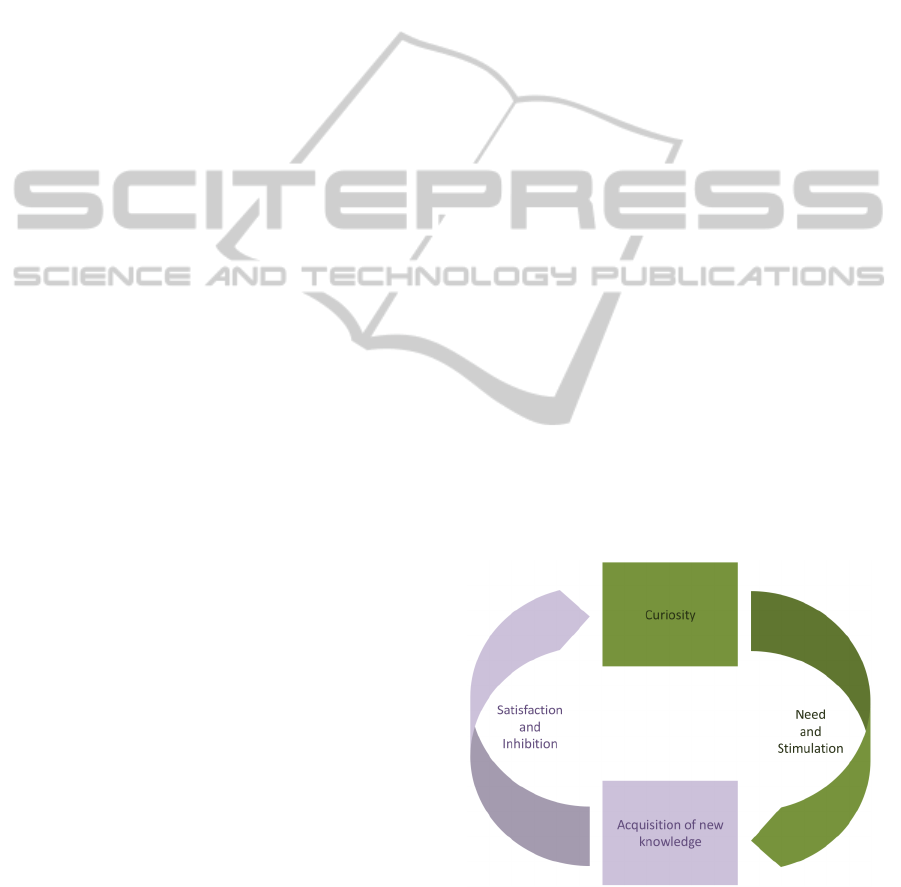
Figure 1: General concept of knowledge acquisition’s
regulation by curiosity in human cognition.
It also seems that it acts to stimulate long-term
memory in remembering new or surprising
ArtificialCuriosityEmergingHuman-likeBehaviour-AFundationforFullyAutonomousCognitiveMachines
409

information (Kang et al., 2009).Without striving for
biological plausibility, the above-mentioned gives an
important motivation for building of our system:
curiosity stimulates acquisition of new knowledge
and in turn the newly learned knowledge whips up
or appeases the curiosity. In other words, it is the
curiosity, which motivates and regulates any action
of the system. Figure 1 depicts the above-formulated
concept.
3.1.1 Perceptual Curiosity and Visual
Saliency
In their perception, humans rely strikingly much on
vision. It is then pertinent to consider chiefly the
visual information and its learning processes. Thus,
it appears appropriate here to draw inspiration from
studies on human infants learning by demonstration.
Experiments in (Brand et al., 2002) show that it is
the explicitness or exaggeration of an action that
helps a child to understand, what is important in the
actual context of learning. It may be generalized,
that it is the saliency (in terms of motion, colors,
etc.) that lets the pertinent information “stand-out”
from the context and become “surprising” (Wolfe,
2004). We argue that in this context the visual
saliency may be helpful to enable unsupervised
extraction and subsequent learning of a previously
unknown object by a machine. In other words,
perceptual curiosity has been realized through a
saliency detection approach.
3.1.2 Epistemic Curiosity
and Learning-by-Observation
and Interaction
Epistemic curiosity stimulates the high level
knowledge acquisition mechanism constructing new
semantic knowledge and to fill the gaps of missing
knowledge. Thus, epistemic curiosity operates
inherently at “conscious” cognitive level, as it
requires an intentional search and premeditated
interaction with the environment. This mechanism
allows the machine to learn abstract (e.g.
insubstantial) knowledge, after interpreting the
world in which it evolves, by using appropriate
terms from human language. It is important to stress
that this is done without making use of a priori
knowledge. The task is realized by word-meaning
anchoring based on learning-by-observation and by
interaction with its human counterpart. The model is
closely inspired by learning process of human
infants.
The machine shares its perception of the
surrounding world with the human (tutor) and
interacts with him. The tutor on his turn shares with
the machine his knowledge about the world within
the form of natural speech (utterances)
accompanying machine’s observations and
completing its knowledge about the perceived
reality. In other words, of such a high-level
cognitive mechanism is to allow the machine to
anchor the heard terms to its sensory-motor
experience and to flexibly shape this anchoring
accordingly to its growing knowledge about the
world. The described mechanism can play a key role
in linking object extraction and learning techniques
on one side, and ontologies on the other side. The
former ones are closely related to perceptual reality,
but are unaware of the meaning of objects they
identify. While the latter ones are able to represent
complex semantic knowledge about the world, but,
they are unaware of the perceptual reality of
concepts they are handling.
3.2 Architecture of the Curiosity based
Artificial Cognitive Intellect
As depicted in figure 2, the general architecture of
the investigated artificial intellectual system is
organized around four main modules, derived from
needs outlined previously and from what has been
previously mentioned about the role of curiosity.
The “Behaviour Control” unit shapes the overall
coherent (intelligent) behaviour of the machine by
collecting results from the three other units and by
providing information and requests issued from
surrounding environment. The “Navigation” unit is
in charge of machines apposite evolution in its
surrounding world. The task of the
“Communication” unit is to allow communicating
this knowledge to the outer world and to handle
inputs from humans and transfer them into a
machine readable form. It enables the system to
communicate in two ways with other actors, be it
similar intelligent machines or human beings.
Finally, the task of “Knowledge Acquisition” unit is
knowledge gathering and handling, derivation of
high-level representation from low-level sensory
data and construction of semantic relationships from
interpretation of perceived information.
Accordingly to (Madani and Sabourin, 2011) and
as in (Madani et al., 2012), the general concept of
“Knowledge Acquisition” unit could be depicted as
shown in figure 3. It includes one unconscious visual
level containing a number of UCF and one
conscious visual level which may contains a number
of CCF. The knowledge extraction from visual
pattern follows the process involving both kinds of
IJCCI2013-InternationalJointConferenceonComputationalIntelligence
410
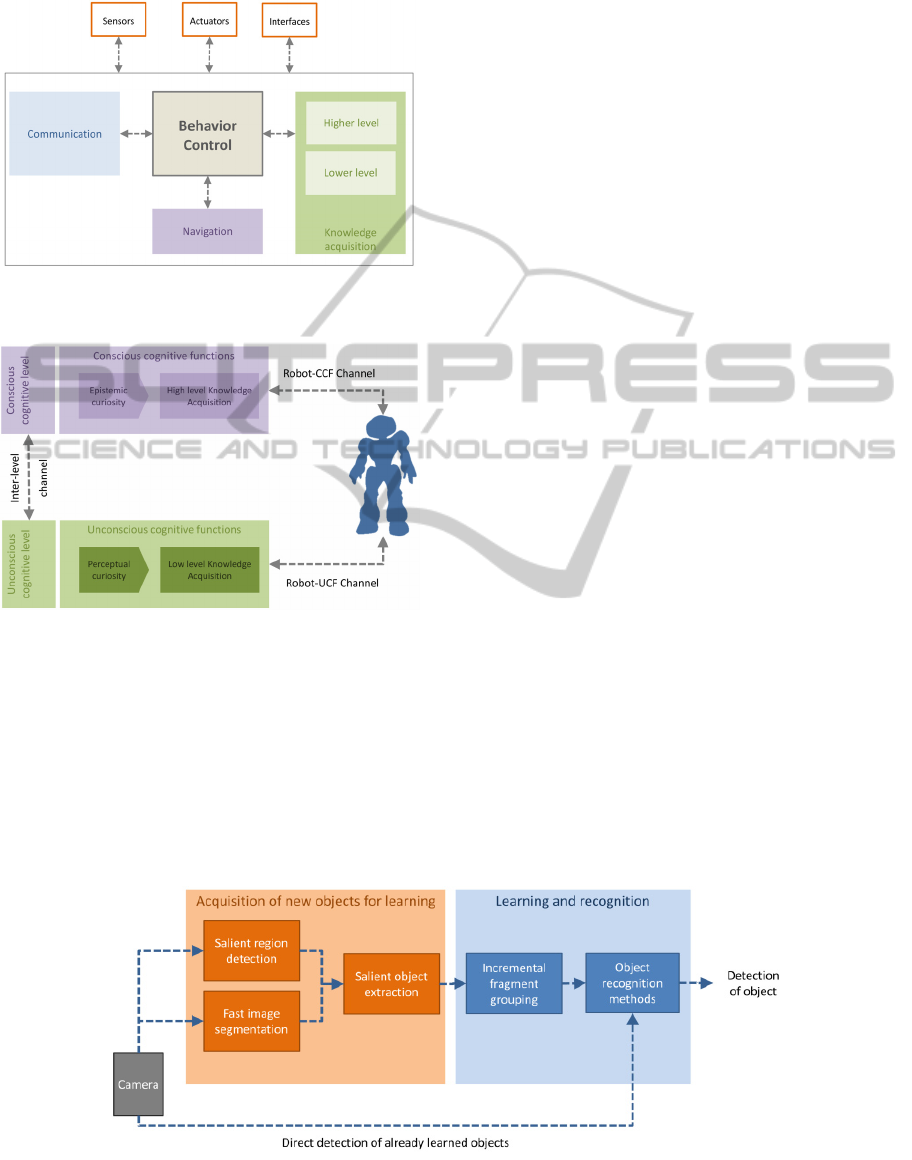
aforementioned curiosity (“perceptual curiosity” and
the “epistemic curiosity”.
Figure 2: Block diagram showing the general architecture
of the investigated artificial intellectual system.
Figure 3: Block diagram of “Knowledge Acquisition” unit
and places of the perceptual and the epistemic curiosities.
The perceptual curiosity motivates or stimulates
what we call the low level knowledge acquisition
and concerns “reflexive” (unconscious) processing
level. It seeks “surprising” or “attention-drawing”
information in given visual data. The task of the
perceptual curiosity is realized by perceptual
saliency detection mechanisms. This gives the basis
for operation of high-level knowledge acquisition,
which is stimulated by epistemic curiosity. Being
previously defined as the process, that motivate to
“learn new ideas and solving intellectual problems”,
the epistemic curiosity is here the motor of: learning
new concepts based on what has been gathered on
the lower-level and eliminating information gaps by
encouraging an active search for the missing
information.
4 PERCEPTUAL CURIOSITY
THROUGH VISUAL SALIENCY
As mentioned in previous section, the perceptual
curiosity relates visual attention and thus could be
realized through the saliency detection approach.
However, the exiting salient objects’ detection
approaches as well as those connecting the detection
and recognition techniques used by those approaches
rely on human made databases, requiring a
substantial time and a skilled human expert. Thus, a
fully autonomous machine vision system, aiming
recognizing salient objects on its own, could not be
achieved with the above-mentioned techniques.
Motivated by the mentioned shortcoming regarding
existing object recognition methods, we have
proposed earlier an intelligent Machine-Vision
system able to detect and to learn autonomously
individual objects within real environment. The
approach has been detailed in (Ramik, 2011-a) and
(Ramik, 2011-b) using an architecture following
“cognitive” frame described in (Madani, 2011) and
(Madani, 2012). Its key capacities are: autonomous
extraction of multiple objects from raw unlabeled
camera images, learning of those objects
autonomously and recognition of the learned objects
in different conditions or in different visual contexts.
Allowing the machine to learn and to recognize
Figure 4: Block diagram of visual saliency system.
ArtificialCuriosityEmergingHuman-likeBehaviour-AFundationforFullyAutonomousCognitiveMachines
411
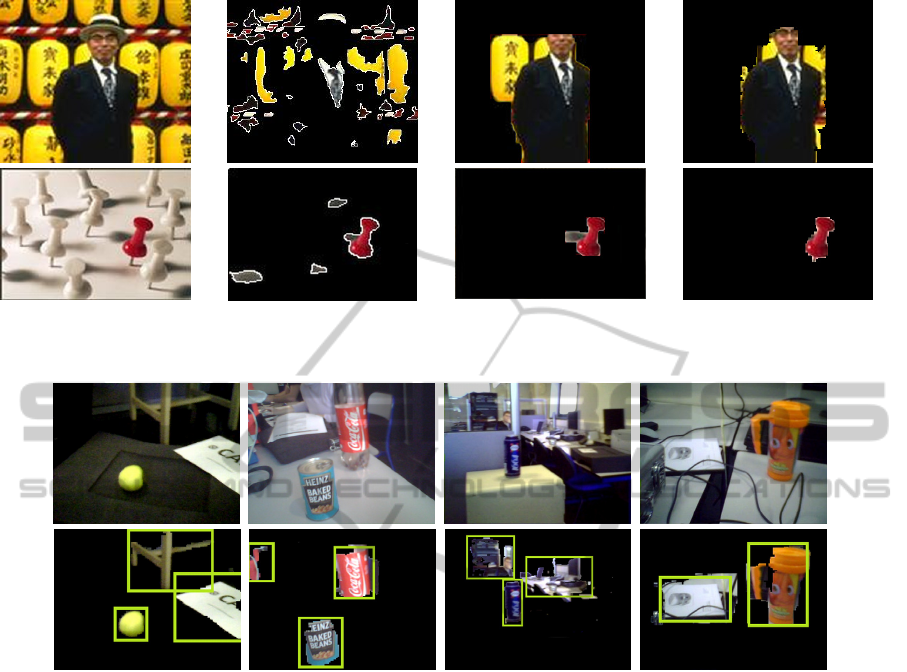
Original input image Using (Acanta, 2009) Using (Liu, 2011) Using our system
Figure 5: Comparison of different salient object detection algorithms. 1
st
column: original image, 2
nd
column: results using
(Achanta et al., 2009), 3
rd
column: results using (Liu et al., 2011) and 4
th
column: results of our approach.
Figure 6: Samples of real environment issued images (upper row) and salient objects detected by our algorithm, marked by
green rectangles (lower row).
Allowing the machine to learn and to recognize
objects encountered in its surrounding environment
in a completely automated manner, the designed
object learning system consists of several units
which collaborate together. Figure 4 depicts the
block-diagram of the system showing different units
and their relations. Two main parts may be
identified, each one containing several processing
units. The first part, labelled “Acquisition of new
objects for learning” takes a raw image from the
camera, detects visually important objects on it and
extracts them so that they can be used as prospective
samples for learning. In parallel the input image is
segmented and split into a set of segments according
to the chromatic surface properties.
The algorithm is shown to be robust to common
illumination effects like shadows and reflections,
which helps our system to cope with real
illumination conditions. Finally, combining results
of the two aforementioned units, the “Salient object
extraction” unit extracts segments found on salient
regions and constructs the salient objects from the
input image.
The second part incrementally clusters the
detected salient objects, learns new salient objects
and handles the recognition of previously learned
objects (in recognition phase). In fact, the extracted
salient objects are fed into the “Incremental
fragment grouping” unit. Here, an on-line
classification is performed on each object by a set of
weak classifiers and incrementally groups containing
the same object extracted from different images are
formed. These groups can be then used as a kind of
visual memory of visual database describing each of
the extracted objects. This alone would be enough
for recognition of each already seen object, if it was
ensured that each particular object will be found in
the same visual context next time it is encountered
by our system. However, such hypothesis (e.g.
expectation) is clearly too restrictive for a system
that aims to recognize the once learned objects in
any conditions or contexts. That is why the last unit
IJCCI2013-InternationalJointConferenceonComputationalIntelligence
412

of the system, tagged “Object recognition methods”,
is added. Its role is, by employing existing object
recognition algorithms, to learn from the visual
database built by “incremental fragment grouping”
unit and to recognize those objects regardless to
their saliency in new settings. Thus the already
learned objects can be recognized directly from the
input image. Figures 5 and 6 give examples of
salient objects’ detection obtained by the presented
system compared to two already existing techniques
(figure 5) as well as examples obtained from
observing the real environment (figure 6).
With respect to the expected goal requiring real-
time processing skills, the system is designed with
emphasis on on-line and real-time operation.
Moreover, the system itself is however not limited to
mobile platforms and can be amply used in context
of various other applications ( as those dealing with
sensor networks, intelligent houses etc...).
5 HIGH-LEVEL KNOWLEDGE
ACQUISITION
The problem of learning brings an inherent problem
of distinguishing the pertinent sensory information
(the one to which the tutor is referring) and the
impertinent one. It indeed is a paradox, but in
contrary to what one may believe, sensors provide
generally too much data input: a lot more than the
amount effectively needed. It is the task of higher
structures (e.g. an attention system or in general a
machine learning system adapted to this task) to
draw the attention to particular features of the data,
which are pertinent in context of a particular task.
The solution to this task is not obvious even if we
achieve joint attention in the robot. This is illustrated
on figure. 7. Let us consider a robot (machine)
learning a single type of features, e.g. for example
colors. If a tutor points to one object (e.g. for
example a red flower) among many others, and
describes it by saying: “The flower is red!”, the
robot still has to distinguish which of the several
colors and shades, found on the concerned object,
the tutor is referring to. This step is an inevitable one
before beginning the learning itself. In traditional
learning systems, such task-relevant (i.e. pertinent)
information is extracted by a human expert. In a
system capable of autonomous learning, however,
this has to be done in an automated way and without
recourse to human-extracted features.
Figure 8 gives the bloc-diagram of key
operations flow of the system proposed in this
section. As it could be seen in figure 7, sensor data
bring inherently both pertinent and impertinent
information mixed up. To achieve correct detection
of pertinent information in spite of such an
uncertainty, we adopt the following strategy. The
system extracts features from important objects
found in the scene along with words the tutor used to
describe the presented objects. Then, the system
generates its beliefs about which word could
describe which feature. The beliefs are seen as
organisms in a genetic algorithm. Here, the
appropriate fitness function is of major importance.
To calculate the fitness, a classifier is trained based
on each belief about the world. Using it, the
cognitive system undertakes to interpret the objects
it has already seen. The utterances pronounced by
the human tutor in presence of each already seen
object are compared with the machine’s utterances
used to describe it based on its current belief. The
closer the machine's description is to the one given
by the human, the higher the fitness is.
5.1 Observation and Interpretation
The present sub-section explains how observed (e.g.
visual) information is interpreted by the presented
system. For, this, let us suppose that visual
information is acquired through appropriate sensor
(for example a camera, etc…), which makes the
system able to observe the surrounding world. This
means that the observed world is represented as a set
of features
k
iiiI ,,,
21
. Let us also suppose
that each time the machine makes an observation
O
,
a human tutor gives it a set of utterances
H
U
describing important objects found currently in the
observed world. Let us denote
U
the set of all
utterances ever given about the world. Accordingly
to what has been introduced at the beginning of this
section, the goal for the machine is to discriminate
the pertinent information from the impertinent one
and to correctly map the utterances to appropriate
perceived features. In other words, the machine has
to establish a word-meaning relationship between
the uttered words and its own perception about the
observed information. The machine is further
allowed to interact with the human in order to clarify
and verify its interpretations, following the
stimulation of its epistemic curiosity.
For this purpose, we define an observation
O
as
an ordered pair
Hl
UIo ,
, where
II
l
stands
for the set of features obtained from observation
and
UU
H
is the set of utterances given in the
ArtificialCuriosityEmergingHuman-likeBehaviour-AFundationforFullyAutonomousCognitiveMachines
413
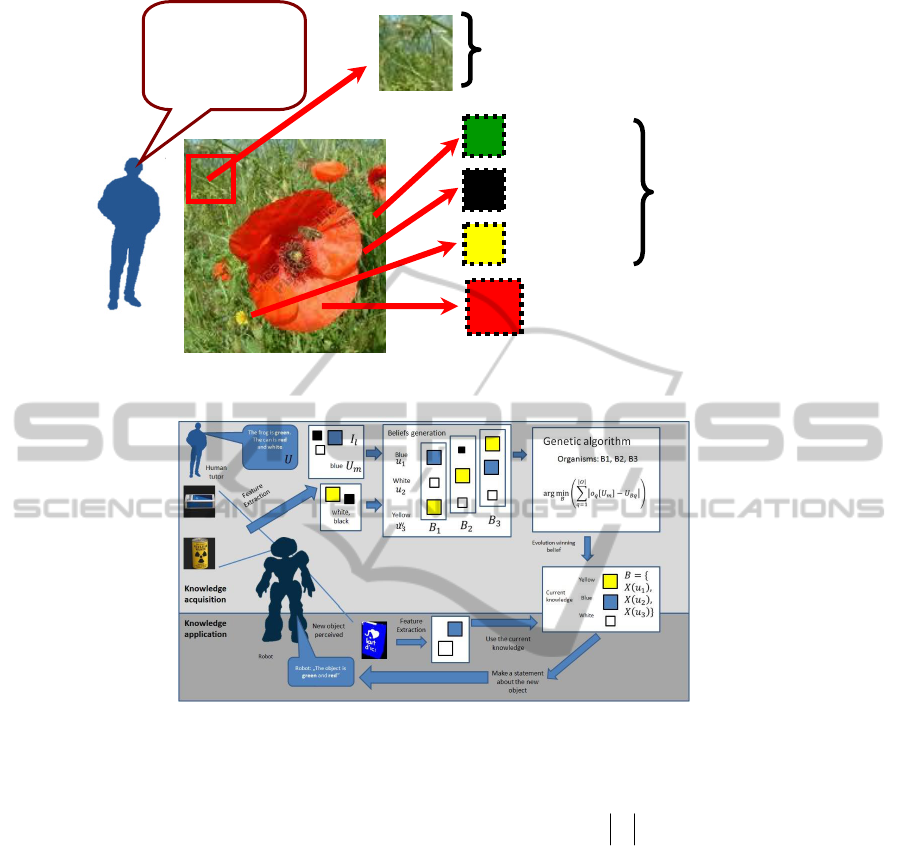
Figure 7: A human would describe this flower as being “red” in spite of the fact, that this is not its only color.
Figure 8: The proposed system’ operational flow showing learning process of single-type of features. The example shows
the context of a particular learning task, i.e. color learning and interpretation.
context of that observation. Following Eq. (1)
l
I
is a
sum of all the pertinent information
p
i
for a given
utterance
U
u
(i.e. features that can be described
as
u
in the language used for communication
between the human and the robot), all the
impertinent information
i
i
(i.e. features that are not
described by the given
u
, but might be described
by another
Uu
i
) and noise
.
HH
U
i
U
pl
uiuiI
(1)
Let us define in a general way, an interpretation
uX
of an utterance
u
as an ordered pair
j
IuuX ,
(where
II
j
), which denotes
that a sub-set of features
j
I
of
I
is interpreted as
u
. Then a belief is defined accordingly to Eq. (2)
as an ordered set of
uX
interpreting utterances
u
, where
Un
. Belief
B
is a mapping
(relation) from the set of
U
to
I
. All members of
U
map to one or more members of
I
and no two
members of
U
map to the same member of
I
.
n
uXuXB ,,
1
(2)
According to Eq. (3) one can determine the belief
B
,
which interprets in the most coherent way the
observations made so far. It is done by looking for
such a belief, which minimizes across all the
observations
Oo
q
the difference between the
utterances
Hq
UU
made by human on each
particular observation
Oo
q
, and those composed
the machine (denoted
Rq
U
), by using the belief
B
on the same observation. In other words, we are
pertinent
impertinent
i
p
(“Red”)
i
i
(“Red”)
Noise
“Green”
“Black”
“Yellow”
This flower
is “Red”
IJCCI2013-InternationalJointConferenceonComputationalIntelligence
414
looking for a belief
B
, which would make the
machine describe a particular sight with utterances
as close as possible to those that would make a
human on the same prospect.
O
q
RqHq
B
UU
1
minarg
(3)
5.2 Evolutionary Searching for Most
Coherent Interpretation
The system has to look for a belief
B
, which would
make the robot describing a particular scene with
utterances as close and as coherent as possible to
those made by a human on the same scene. For this
purpose, instead performing the exhaustive search
over all possible beliefs, we propose to search for a
suboptimal belief by means of a genetic algorithm.
For doing that, we assume that each organism within
it has its genome constituted by a belief, which,
results into genomes of equal size
U
containing
interpretations
uX
of all utterances from
U
. The
task of coherent belief generation is to generate
beliefs, which are coherent with the observed reality.
In our genetic algorithm, the genomes’ generation is
a belief generation process generating genomes (e.g.
beliefs) as follows. For each interpretation
uX
the
process explores whole the set
O
. For each
observation
Oo
q
, if
Hq
Uu
then features
qq
Ii
(with
II
q
) are extracted. As described in
(1), the extracted set of features contains as well
pertinent as impertinent features.
The coherent belief generation is done by
deciding, which features
qq
Ii
may possibly be the
pertinent ones. The decision is driven by two
principles. The first one is the principle of
“proximity”, stating that any feature
i
is more likely
to be selected as pertinent in the context of
u , if its
distance to other already selected features is
comparatively small. The second principle is the
“coherence” with all the observations in
O
. This
means, that any observation
Oo
q
, corresponding
to
Hq
Uu
, has to have at least one feature assigned
into
q
I
of the current
q
IuuX ,
.
To evaluate a given organism, a classifier is
trained, whose classes are the utterances from
U
and the training data for each class
U
u
are those
corresponding to
q
IuuX ,
, i.e. the features
associated with the given
u
in the genome. This
classifier is used through whole set
O
of
observations, classifying utterances
Uu
describing each
Oo
q
accordingly to its
extracted features. Such a classification results in the
set of utterances
Rq
U
(meaning that a belief
B
is
tested regarding the q
th
observation). Block-diagram
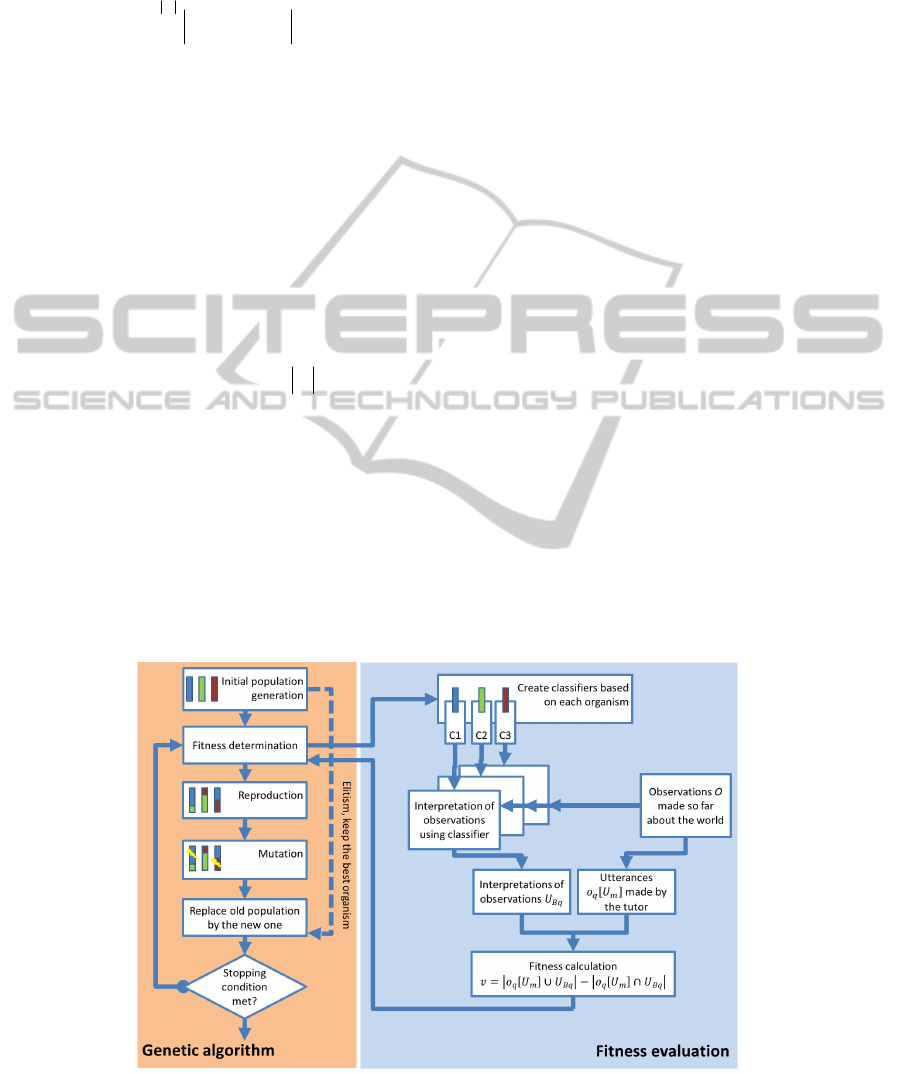
of described genetic algorithm’s workflow is given
by figure 9.
Figure 9: Bloc diagram of described genetic algorithm’s workflow. The left part describes the genetic algorithm itself, while
the right part focuses on the fitness evaluation workflow.
ArtificialCuriosityEmergingHuman-likeBehaviour-AFundationforFullyAutonomousCognitiveMachines
415

1
1
D
(4)
RqHqRqHq
UUUU
(5)
5.3 Role of Human-machine
Interaction
In our approach, the learning by interaction is
carried out in two kinds of interactions: human-to-
machine and machine-to-human. The human-to-
machine interaction is activated anytime the
machine interprets wrongly a given word world.
When the human receives a wrong response, he
provides the machine a new observation by uttering
the desired interpretation. Then system searches for
a new interpretation of the world conformably to this
new observation. The machine-to-human interaction
may be activated when the robot attempts to
interpret a particular feature classified with a very
low confidence. Led by the epistemic curiosity, the
machine asks its human counterpart to make an
utterance about the uncertain observation. If
machine’s interpretation is not conforming to the
utterance given by the human, this observation is
recorded as a new knowledge and a search for the
new interpretation is started.
6 VALIDATION
AND EXPERIMENTAL
RESULTS
The validation of the proposed system has been
performed on the basis of both simulation of the
designed system as by an implementation on a real
humanoid robot. A video capturing different parts of
the experiment may be found online on:
http://youtu.be/W5FD6 zXihOo. As real robot we
have considered NAO robot (a small humanoid
robot from Aldebaran Robotics) which provides a
number of facilities such as onboard camera
(vision), communication devices and onboard
speech generator. The fact that the above-mentioned
facilities been already available offers a huge save of
time, even if those faculties remain quite basic in
that kind of robots.
Although the usage of the presented system is
not specifically bound to humanoid robots, it is
pertinent to state two main reasons why a humanoid
robot is used for the system’s validation. The first
reason for this is that from the definition of the term
“humanoid”, a humanoid robot is aspired to make its
perception close to the human’s one, entailing a
more human-like experience of the world. This is an
important aspect to be considered in context of
sharing knowledge between a human and a robot.
The second reason is that humanoid robots are
specifically designed to interact with humans in a
“natural” way by using e.g. a loudspeaker and
microphone set in order to allow for a bi-directional
communication with human by speech synthesis and
speech analysis and recognition. This is of
importance when speaking about a natural human-
robot interaction during learning.
6.1 Simulation based Validation
The simulation based validation finds its pertinence
in assessment of the investigated cognitive-system’s
performances. In fact, due to difficulties inherent to
organization of strictly same experimental protocols
on different real robots and within various realistic
contexts, the simulated validation becomes an
appealing way to ensure that the protocol remains
the same. For simulation based evaluation of the
behaviour of the above-described system, we have
considered color names learning problem. In
everyday dialogs, people tend to describe objects,
which they see, with only a few color terms (usually
only one or two), although the objects in itself
contains many more colors. Also different people
can have slightly different preferences on what
names to use for which color. Due to this, learning
color names is a difficult task and it is a relevant
sample problem to test our system.
In the simulated environment, images of real-
world objects were presented to the system
alongside with textual tags describing colors present
on each object. The images were taken from the
Columbia Object Image Library (COIL) contains
1000 color images of different views of 100 objects
database. Five fluent English speakers were asked to
Figure 10: Original WCS table (upper image), its system’s
made interpretation (lower image).
IJCCI2013-InternationalJointConferenceonComputationalIntelligence
416

describe each object in terms of colors. We restricted
the choice of colors to “Black”, “Gray”, “White”,
“Red”, “Green”, “Blue” and “Yellow”, based on the
color opponent process theory (Schindler, 1964).
The tagging of the entire set of images was
highly coherent across the subjects. In each run of
the experiment, we have randomly chosen a tagged
set. The utterances were given in the form of text
extracted from the descriptions. The object was
accepted as correctly interpreted if the system’s and
the human’s interpretations were equal. The rate of
correctly described objects from the test set was
approximately 91%. Figure 10 gives the result of
interpretation by the system of the colors of the
WCS table.
6.2 Real Robot based Validation
The designed system has been implemented on NAO
robot (from Aldebaran Robotics). It is a small
humanoid robot which provides a number of
facilities such as onboard camera (vision),
communication devices and onboard speech
generator. The fact that the above-mentioned
facilities been already available offers a huge save of
time, even if those faculties remain quite basic in
that kind of robots. If NAO robot integrates an
onboard speech-recognition algorithm (e.g. some
kind of speech-to-text converter) which is sufficient
for “hearing” the tutor, however its onboard speech
generator is a basic text-to-speech converter. It is not
sufficient to allow the tutor addressing the robot in
natural speech. To overcome NAO’s limitations
relating this purpose, the TreeTagger tool was used
in combination with robot's speech-recognition
system to obtain the part-of-speech information from
situated dialogs. Developed by the ICL at University
of Stuttgart, available online at: http://www.ims.uni-
stuttgart.de/projekte/corplex/ TreeTagger. Standard
English grammar rules were used to determine
whether the sentence is demonstrative, descriptive or
an order. To communicate with the tutor, the robot
used its text-to-speech engine.
A number of every-day objects have been
collected for purposes of the experiment. They have
been randomly divided into two sets for training and
for testing. The learning set objects were placed
around the robot and then a human tutor pointed to
each of them calling it by its name. Using its
640x480 monocular color camera, the robot
discovered and learned the objects around it by the
salient object detection approach we have described
earlier. Here, this approach has been extended by
detecting the movement of the tutor's hand to
achieve joint attention. In this way, the robot was
able to determine what object the tutor is referring to
and to learn its name. Figure 11 shows two
photographs of the above-reported experimental
validation. Figure 12 shows examples of two extracted
objects and the robot’s interpretation of the concerned
objects.
Figure 11: Experimental setup showing the tutor pointing a
yellow chocolate box which has been seen, interpreted and
learned (by the robot) in term of colors then asking the robot to
describe the chosen object (lower left-side) and the ground truth
detected objects as the robot perceives them (lover right-side).
Figure 12: Two objects extracted from robot's
surroundings. Right: the original image, left: features
interpreted. For the “apple”, the robot's given description
was “the object is red”. For the box, the description was
“the object is blue and white”.
During the experiment, the robot has been asked to
learn a subset among the 25 considered objects: in
term of associating the name of each detected object
to that object. At the same time, a second learning
has been performed involving the interaction with
the tutor who has successively pointed the above-
learned objects describing (e.g. telling) to the robot
the color of each object. Here-bellow an example of
the Human-Robot interactive learning is reported:
Human [pointing a red aid-kit]: “This is a first-aid-kit!”
Robot: “I will remember that this is a first-aid-kit.”
Human: “It is red and white”.
Robot: “OK, the first-aid-kit is red and the white.”
After learning the names and colors of the
discovered objects, the robot is asked to describe a
number of objects including as well some of already
learned objects but in different posture (for example
the yellow box presented in reverse posture) as a
number of still unseen objects (as for example a red
apple or a white teddy-bear). The robot has
successfully described, in a coherent linguistics, the
presented seen and unseen objects. Here-bellow is
ArtificialCuriosityEmergingHuman-likeBehaviour-AFundationforFullyAutonomousCognitiveMachines
417

the Human-Robot interaction during the experiment:
Human [pointing the unseen white teddy-bear]:
“Describe this!”
Robot:: “It is white!”
Human [pointing the already seen, but reversed, yellow
box]: “Describe this!”
Robot: “It is yellow!”
Human [pointing the unseen apple]: “Describe this!”
Robot: “It is red!”
7 CONCLUSIONS
This paper has presented, discussed and validated a
cognitive system for high-level knowledge
acquisition based on the notion of artificial curiosity.
Driving as well the lower as the higher levels of the
presented cognitive system, the emergent artificial
curiosity allow such a system to learn in an
autonomous manner new knowledge about unknown
surrounding world and to complete (enrich or
correct) its knowledge by interacting with a human.
Experimental results, performed as well on a
simulation platform as using the NAO robot show
the pertinence of the investigated concepts as well as
the effectiveness of the designed system. Although it
is difficult to make a precise comparison due to
different experimental protocols, the results we
obtained show that our system is able to learn faster
and from significantly fewer examples, than the
most of more-or-less similar implementations.
Based on obtained results, it is thus justified to
say, that a robot endowed with such artificial
curiosity based intelligence will necessarily include
autonomous cognitive capabilities. With respect to
this, the further perspectives will focus integration of
the investigated concepts in other kinds of machines,
such as mobile robots. There, it will play the role of
an underlying system for machine cognition and
knowledge acquisition.
REFERENCES
Achanta, Estrada, F., Wils, P., Susstrunk, S., 2008. Salient
Region Detection and Segmentation, Proc. of
International Conference on Computer Vision Systems
(ICVS '08), vol. 5008, LNCS, Springer Berlin /
Heidelberg, 66_75.
Achanta, R., Hemami, S., Estrada, F., Susstrunk, S., 2009
Frequency-tuned Salient Region Detection, Proc. of
IEEE International Conference on Computer Vision
and Pattern Recognition (CVPR).
Araki, T., Nakamura, T., Nagai, T., Funakoshi, K.,
Nakano, M. and Iwahashi, N., 2011 'Autonomous
acquisition of multimodal information for online
object concept formation by robots', IEEE/RSJ
International Conference on Intelligent Robots and
Systems, San Francisco, 1540-1547.
Berlyne, D. E., 1954, 'A theory of human curiosity',
British Journal of Psychology, vol. 45, no. 3, August,
pp. 180-191.
Bowerman, M. , 1983, 'How Do Children Avoid
Constructing an Overly General Grammar in the
Absence of Feedback about What is Not a Sentence?',
Papers and Reports on Child Language Development.
Brand, R. J., Baldwin, D. A. and Ashburn, L. A., 2002
'Evidence for 'motionese': modifications in mothers
infant-directed action', Developmental Science, 72-83.
Coradeschi, S. and Saffiotti, A., 2003, 'An introduction to
the anchoring problem', Robotics and Autonomous
Systems, vol. 43, pp. 85-96.
Goodrich, M. A. and Schultz, A. C., 2007, 'Human-robot
interaction: a survey', Foundations and trends in
human computer interaction, vol. 1, jan, pp. 203-275.
Greeff, J. D., Delaunay, F. and Belpaeme, T., 2009,
'Human-Robot Interaction in Concept Acquisition: a
computational model', Proceedings of the 2009 IEEE
8th International Conference on Development and
Learning, Washington, 1-6.
Harel, J., Koch, C., Perona, P., 2007, Graph-based visual
saliency, Advances in Neural Information Processing
Systems 19, 545_552.
Itti, L., Koch, C. , Niebur, E., 1998, A Model of Saliency-
Based Visual Attention for Rapid Scene Analysis,
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 20, 1254_1259.
Kang, M. J. J., Hsu, M., Krajbich, I. M., Loewenstein, G.,
McClure, S. M., Wang, J. T. T. and Camerer, C. F.,
2009, 'The wick in the candle of learning: epistemic
curiosity activates reward circuitry and enhances
memory', Psychological science, vol. 20, no. 8,
August, pp. 963-973, Available: 1467-9280.
Kuhn, D., Garcia-Mila, M., Zohar, A. and Andersen, C.,
1995, 'Strategies of knowledge acquisition', Society for
Research in Child Development Monographs, vol. 60
(4), no. 245.
Liang, Z., Chi, Z., Fu, H., Feng, D., 2012, Salient object
detection using content-sensitive hypergraph
representation and partitioning, Pattern Recogn. 45
(11), 3886_3901.
Litman, J. A., 2008, 'Interest and deprivation factors of
epistemic curiosity', Personality and Individual
Differences, vol. 44, no. 7, pp. 1585-1595.
Liu, T., Yuan, Z., Sun, J., Wang, J., Zheng, N. , Tang X.,
Shum, H.-Y., 2011, Learning to Detect a Salient
Object, IEEE Trans. Pattern Anal. Mach. Intell. 33 (2),
353_367.
Madani, K. and Sabourin, C., 2011, 'Multi-level cognitive
machine-learning based concept for human-like
"artificial" walking: Application to autonomous stroll
of humanoid robots. Neurocomputing, Vol. 74, 1213-
1228.
Madani, K., Ramik, D. M. and Sabourin, C., 2012, Multi-
level cognitive machine-learning based concept for
IJCCI2013-InternationalJointConferenceonComputationalIntelligence
418

Artificial Awareness: application to humanoid robot's
awareness using visual saliency”, J. of Applied
Computational Intelligence and Soft Computing,. DOI:
10.1155/2012/354785.
Ogino, M., Kikuchi, M. and Asada, M., 2006, 'How can
humanoid acquire lexicon? active approach by
attention and learning biases based on curiosity',
IEEE/RSJ International Conference on Intelligent
Robots and Systems, Beijing, 3480-3485.
Ramík, D. M., Sabourin, C. and Madani K., 2011-a, 'A
Real-time Robot Vision Approach Combining Visual
Saliency and Unsupervised Learning', Proc. of 14th
International Conference on Climbing and Walking
Robots and the Support Technologies for Mobile
Machines, Paris, 241-248.
Ramík, D. M., Sabourin, C. and Madani, K., 2011-b,
'Hybrid Salient Object Extraction Approach with
Automatic Estimation of Visual Attention Scale', Proc.
of 7
th
International Conference on Signal Image
Technology & Internet-Based Systems, Dijon, 438-
445.
Saunders, J., Nehaniv, C. L. and Lyon, C., 2010, 'Robot
learning of lexical semantics from sensorimotor
interaction and the unrestricted speech of human
tutors', Second International Symposium on New
Frontiers in Human-Robot Interaction, Leicester, 95-
102.
Schindler, M. and von Goethe, J. W., 1964, Goethe’s
theory of colour applied by Maria Schindler. New
Knowledge Books, East Grinstead, Eng.
Skocaj, D., Kristan, M., Vrecko, A., Mahnic, M., Janicek,
M., Kruijff, G.-J.M., Hanheide, M., Hawes, N., Keller,
T., Zillich, M. and Zhou, K., 2011, 'A system for
interactive learning in dialogue with a tutor',
IEEE/RSJ International Conference on Intelligent
Robots and Systems IROS 2011, San Francisco, 3387-
3394.
Waxman, S. R. and Gelman, S. A., 2009, 'Early word-
learning entails reference, not merely associations',
Trends in cognitive science, vol. 13, jun, pp. 258-263.
Wolfe, J. M. and Horowitz, T. S., 2004, 'What attributes
guide the deployment of visual attention and how do
they do it?', Nature Reviews Neuroscience, 495-501.
Yu, C., 2005, 'The emergence of links between lexical
acquisition and object categorization: a computational
study', Connection Science, vol. 17, pp. 381-397.
ArtificialCuriosityEmergingHuman-likeBehaviour-AFundationforFullyAutonomousCognitiveMachines
419
