
Bridging the Semantic Gap between Sensor Data and High Level
Knowledge
Marjan Alirezaie and Amy Loutfi
Cognitive Robotic Systems Lab, Center for Applied Autonomous Sensor Systems (AASS)
Dept. of Science and Technology,
¨
Orebro University, SE-701 82,
¨
Orebro, Sweden
1 STAGE OF THE RESEARCH
Ubiquitous devices such as sensors in weather
stations, health-care centres and generally
wired/wireless sensor networks enable massive
amounts of observations called big data increasing
with the rate of 2.5 quintillion bytes per day (Hilbert
and L
´
opez, 2011). This amount of online data
provides a large potential to have a deeper and
better understanding of the world around us. These
data which are mostly time-series signals must
be interpreted and represented in a manner that is
compatible for humans. Typically, this interpretation
is automated by using complex data driven analysis
methods. The output of such methods can still con-
tain inaccuracies due to the fact that low level sensor
data is subject to shortcomings due to selectivity,
uncertainties and errors. In other words, while data
analysis techniques can provide interpretation of data
in different forms of event detection, more is required
for inducing their meanings to the users in the context
of multiple sensor monitoring.
Furthermore, the Linked Data Cloud including ax-
ioms in different domains such as geographic, gov-
ernment, media and life sciences is growing up so
much that it reached to 31 billion RDF triples in 2011
from over two billion RDF triples in 2007 (Heath and
Bizer, 2011). This interleaved deluge of axioms that
is increasingly becoming connected into a rich net-
work of other data sources can be regarded as a source
of knowledge for tasks demanding the common-sense
knowledge. In addition, the machine processable lan-
guage of this knowledge cloud makes it suitable for
an automatic way of reading and on the whole using
its contents.
Infusing high level knowledge into the observa-
tions of the environment generated by sensors helps
to enhance data interpretation and make ”sense of
sensor data”. However, data driven processes ma-
nipulating sensor readings are not able to automati-
cally consider the wealth of high level knowledge for
the integration. In other words, what is needed is a
method which is able to automatically bridge the se-
mantic gap between qualitative high level knowledge
and quantitative low level data which are inherently
difficult to interpret. This work is part of an ongo-
ing effort to specifically address a particular instanti-
ation of the semantic gap special and unintuitive data
coming from particular chemical sensors measuring
gases or odours and the knowledge that humans have
about odours (Loutfi et al., 2001; Loutfi, 2006). The
work developed in this thesis will also examine gen-
eral methods that can be applied to various domains
involving continous time series data. This paper de-
scribes the approach used to work towards this goal.
The paper outlines the main contributions of the work,
details the progress so far after two year of the thesis
work, and provides an outline of planned activities.
2 OUTLINE OF OBJECTIVES
The objective of this research is to employ abduc-
tive (non-monotonic) reasoning to automatically de-
termine correspondences between sensor data (e.g.
time series signals) and concepts in massive knowl-
edge sources (e.g. Linked Open Data). Abductive
reasoning will provide the ”best explanations” for ob-
served behaviour in the sensor data and according
to the principals of non-monotonic reasoning (Eiter
et al., 1997), the ”best explanation” in this case is de-
fined based on two parameters:
• Covering (covers all observed things)
• Minimality (reduces redundancy)
Given a set of rules, deductive reasoning whose
inferring process goes from effects to causes has more
observation-dependent answers (Pagnucco, 1996)
whereas the abductive reasoning (causes to effects)
considers all the rules having at least one observed
premise’s item. It means that abductive reasoning can
hypothesize knowledge that is needed for the infer-
ring process but is not necessarily available. This fea-
ture of abductive reasoning qualifies it for inferring
21
Alirezaie M. and Loutfi A. (2013).
Bridging the Semantic Gap between Sensor Data and High Level Knowledge.
In Doctoral Consortium, pages 21-27
Copyright
c
SCITEPRESS

from incomplete knowledge. More specifically, using
this reasoning technique, the best explanations which
are dependent to the current amount of facts can be
inferred where the available knowledge is not com-
plete.
Abductive reasoning as such entails controversial
issues for which the following prerequisites are re-
quired:
• A formalisation which unifies the heterogeneous
knowledge from knowledge sources (knowledge
representation)
• A method to relax time complexity given an ab-
ductive reasoning framework satisfying covering
and minimality conditions (efficiency of reason-
ing)
These prerequisites form the basis of the research
problem. However, before going further into their
technical details, it is worth stating the importance
of formalisation of knowledge. Knowledge formal-
izing is about analysing a body of knowledge in order
to translate it into a predefined language having its
own vocabularies, notations and syntactical rules. In
this way, the accurate studying of properties of con-
cepts especially where the knowledge is expressed in
qualitative terms than quantitative terms is improved
(Balduccini and Girotto, 2010), and consequently the
possibility of having better knowledge inference in-
creases.
From the knowledge management point of view,
defining a formalization and subsequently implement-
ing an interpreter especially when the input knowl-
edge is not homogeneous is a challenge. Addressing
this challenge as well as the efficiency of the reason-
ing process are considered as two of the specific con-
tributions of this research work.
3 RESEARCH PROBLEM
One of the research problems addressed in this the-
sis is the problem of encoding a formalisation for
heterogeneous knowledge modelled in RDF/OWL. A
formalization is generally defined based on a set of
syntactical rules along with a set of notations. Dur-
ing a formalization process, the input which in this
research is a set of concepts coming from heteroge-
neous knowledge sources is translated into a new lan-
guage. On account of the ontological structure of
the knowledge repositories, encoding an ”RDF/OWL
friendly” formalisation can speedup this process. For
example, the concepts such as ”object property” and
”data property” which are directly recognisable from
RDF triples can be immediately encoded into predi-
cates (in a logic program) which show the specific re-
lations among entities. In this way, no matter how the
knowledge concepts are represented, the reasoner re-
ceives the set of statements, namely a logic program
implemented within the notations of this formalisa-
tion. This encoding process indicates the necessity
of an interpreter which has the task of converting a
knowledge body formed in RDF/OWL triples into a
logic program defined based on the standard of the
formalization.
However, since in OWL/RDF conventions there
is no limitation for labelling the classes, individuals
and properties the formalization process can meet a
concept modelled in distinct knowledge bodies but
with different names. If these redundancies are not
addressed, the formalization process instead of creat-
ing several logic rules which are atleast common in
one predicate (or generally an atom), may build some
independent rules.
In addition, because of computational factors such
as incompatible hypothesis selection and satisfying
the maximum plausibility, in general, abductive rea-
soning is an NP-hard problem (Bylander, 1991) and
some heuristics are required to reduce its computa-
tional complexity. Since non-monotonic reasoning is
inherently sensitive to adding new facts, as a solu-
tion, we can recognise the missing facts increasing
the time complexity and create a searching term to be
submitted through the knowledge sources. The sec-
ond problem in this research is thus implementing a
sub-process for the reasoner which by recognising the
missing facts provides a guided search in order to re-
duce the complexity.
4 STATE OF THE ART
The common root of all works in integration of data
in different levels of abstraction is in data fusion. The
focus of fusion methods such as (Joshi and Sander-
son, 1999) is on raw data consolidation for the sake
of better data interpretation, however, without any in-
tegration with higher level of data (symbolic knowl-
edge).
In order to consider fusing symbolic knowledge
to numeric data, works such as (Loutfi et al., 2005;
Coradeschi et al., 2013) have gained attention in AI
fields related to robotics and physically embedded
systems. The symbol grounding problem (Harnad,
1990) in general and the anchoring problem (Loutfi
et al., 2005) in particular concentrate on the process of
creating and maintaining the relation between a sym-
bol chosen to label an object in the world and those
data coming from sensors observing the same phys-
IC3K2013-DoctoralConsortium
22
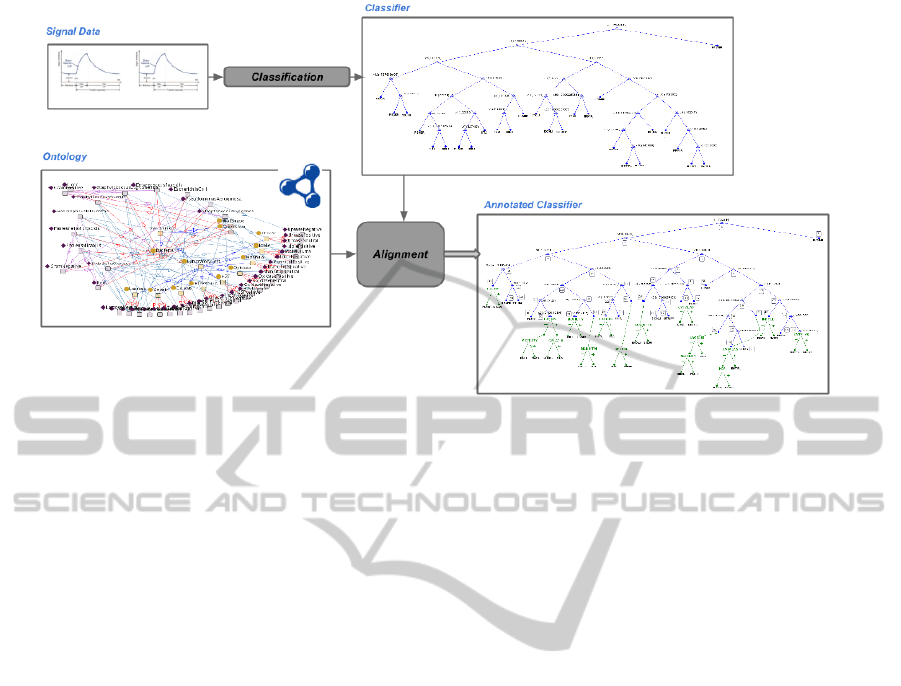
Figure 1: Ontology-Classification Alignment.
ical object in the environment. In most of works,
for example (Melchert et al., 2007), the challenge
is how to perform the anchoring in an artificial sys-
tem and how to find relevant concepts related to sym-
bols to improve the recognition process. In these ef-
forts the association is done in two ways: ground-
ing well-defined concepts in data (top-down process)
and conceptualizing data that exemplifies the concept
(bottom-up process). In these kinds of mapping we
need to have the information about the objects mostly
in forms of production rules which are manually (not
automatically) modelled and are suitable for deduc-
tive reasoning in the environment.
The necessity of a posteriori model implied by
the automatic knowledge acquisition approach has re-
cently emerged in the area of sensor data processing.
The work (Thirunarayan et al., 2009) applies abduc-
tive reasoning over sensor data which are interpreted
based on predefined knowledge. Other works such as
(Henson et al., 2011) and (Henson et al., 2012), model
a system that makes it possible to infer explanations
from an incomplete set of observations which are not
necessarily sensor data. The reasoning framework in
these works is based on Parsimonious Covering The-
ory (PCT) (Reggia and Peng, 1986). Nonetheless,
since PCT in these works is translated into OWL, it
is not able to provide an explanation containing more
than one cause for the observations. Consequently,
following the non-monotonic reasoning approach as
the connector of two levels of represented data, we
aim to encode a framework for automatizing this inte-
gration process as independent to the domain as pos-
sible.
5 METHODOLOGY
The process bridging the so-called semantic gap by
aligning semantic knowledge to sensor data has pro-
ceeded in a three stage process. The final stage has
emerged from discovery of the shortcomings in the
previous two stages. Recalling the specific goal of
this research work which is about odour sensor data,
in this section, we describe the thesis work so far and
the approaches used to address the overall aims of the
thesis.
5.1 Improved Classification of
Multivariate Data using Ontology
Alignment
In this approach we consider a scenario where sen-
sor data that is classifiable into well known categories
from a data driven method is aligned to concepts
which are part of a larger ontological structure. More
specifically, this type of alignment which is recom-
mended for situations where sensor data are unintu-
itive (e.g. electronic nose data) takes advantage of
the classifiers’ topology. Utilizing ontological align-
ment methods such as string and structural match-
ing techniques, it finds relevant informative concepts
from ontologies in order to resolve the misclassifica-
tion. In this approach the ontological alignment tech-
niques are used to align an ontology to a hierarchical
classifier (i.e. decision trees) representing the features
used in classification of labelled sensor signals. The
output of the system is in effect a recommender sys-
tem, and the reason for this is largely due to the type
BridgingtheSemanticGapbetweenSensorDataandHighLevelKnowledge
23
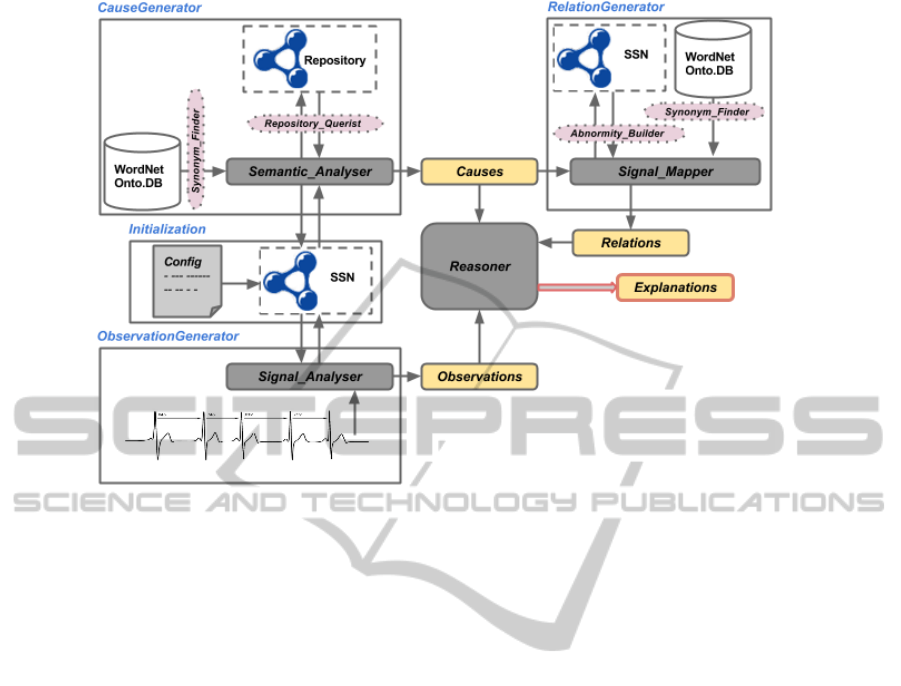
Figure 2: Data Streams Annotation/PCT Reasoner.
of available knowledge of the studied domain.
The steps of this methodology whose outputs are
shortly listed below:
• Classifying pre-processed sensor data (hierarchi-
cal classifiers)
• Localizing misclassified cases in the output of the
classifier
• Aligning the classifier and the ontology to find
similar parts
• Replacing candidate parts of the ontology with
their counterparts in the classifier
In this solution, the focus of the alignment method
is more on structure (inexact graph) matching than on
semantic parts.
The specific data set used in the instantiation of
this approach consists of time-series data from an
electronic nose which is equipped with 22 sensors and
”sniffs” the headspace of clinical blood samples con-
taining 10 types of bacteria species. The objective is
providing an estimate of the type of bacteria present
in the sample. Extracting two descriptors from each
signal, we eventually produce 44 feature values for
the data set of 600 samples accompanied by a label
list containing bacteria species names.
The result from the alignment is an improved clas-
sifier where recommendations are given to a user (ex-
pert) based on the interpretation of the sensor data that
is done automatically. Figure 1 demonstrates the se-
quence of works in this approach.
More details on this work can be found in
(Alirezaie and Loutfi, 2012). This work because
of the shortcoming which was due to the lack of
knowledge regarding the domain follows the struc-
tural (topological) techniques for the alignment pro-
cess rather than the semantic analysis. Therefore, the
concentration is mostly on string matching process
between the labels of the concepts in the ontology
and labels of the nodes in the classifier. However, for
richer data sets measuring different properties of the
environment where more knowledge are available, the
alignment process can take advantage of the reason-
ing that provides the semantic analysis.
5.2 Reasoning about Sensor Data
Annotations using PCT
An inherent part of solutions for the semantic gap
problem is the ability to annotate the signals and in
particular to annotate interesting events with plausi-
ble explanations. It is worth empowering the semantic
gap filling process in terms of semantic analysis if a
more meaningful multivariate data set is the target of
the annotation task. The alignment method explained
in Section 5.1 was suffering from the poor data in
the sense that only one property of the phenomenon
(odour) lacking high level knowledge was measured.
Developing the scenario towards having multiple
sources of sensor data, we study the process of an-
notation. For instance, in a sensor network where a
sensor is accompanied by others that are at the same
IC3K2013-DoctoralConsortium
24
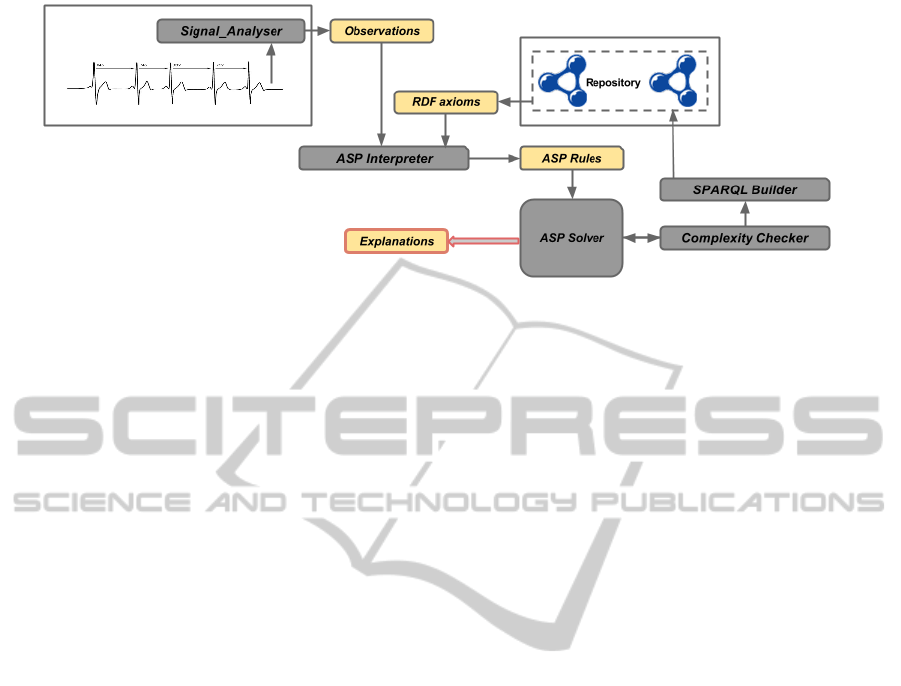
Figure 3: ASP Alignment technique.
time measuring different features of the environment,
we can reason about their influence on each other.
Considering the aforementioned features of the
abductive reasoning, we found it as a complementary
technique for the knowledge retrieving task where the
process needs to sift the best (most relevant) anno-
tations. The alignment method of this approach is a
type of abductive reasoner working based on Parsi-
monious Covering Theory (PCT) (Hilbert and L
´
opez,
2011). Shown in Fig 2, the reasoner receiving three
inputs, namely Observations, Causes and Relations fi-
nally results in Explanations which is considered as a
set of annotations for what are observed over signals.
The basis of this theory is on the Set theory in mathe-
matics so that the reasoner calculates the power set of
the Causes list to find the best explanation. In other
words, the items of the final Explanations are subsets
of the Causes list chosen based on the reasoner prin-
ciples. According to this theory, the best explanation
is defined within two criteria: Covering and Minimal-
ity. With the former criterion, the reasoner nominates
those subsets of the Causes list whose items are re-
lated to all the observations detected in a particular
segment of signals. Furthermore, the minimality cri-
terion which is also called irredundancy considers the
size of the aforementioned selected subset. In this
way, the reasoner is able to choose those covering
subsets of the Causes list that are minimal in terms
of the cardinality.
To evaluate this work, we use multivariate data
coming from medical sensors observing a patient
suffering from several diseases as the ground truth
against which the eventual explanations (annotations)
of the reasoner are compared. This data set is a bench-
mark data set provided for 1994 AI in Medicine sym-
posium submissions (Bache and Lichman, 2013). It
contains 12-hours time-series ICU data (coming from
5 sensors) of a patient suffering from a set of dis-
ease. This package because of the richness of avail-
able online knowledge in medicine is well-suited for
the evaluation task of this alignment technique where
the semantics of concepts are involved in the reason-
ing process. However, we still have a long way to pro-
mote the alignment process. Although the PCT ab-
ductive model is to some extent analysing the seman-
tics, its results are not yet declarative enough and are
just copied from the labels of the concepts in ontolo-
gies. Further, we want to examine our original data
set containing electronic nose data along with other
types of data.
5.3 Reasoning about Sensor Data
Annotations using ASP
Keeping the abductive reasoning approach as the
alignment method, this framework hires an ASP
based reasoner. Recalling the formalization phase,
we want to model a framework that passes the body
of knowledge into an interpreter which encodes the
knowledge into a program familiar with the reasoner.
As mentioned before, due to the expressivity of high
level knowledge modelled by the domains’ experts,
we are aiming to exploit them to have more declar-
ative interpretation for our observations. On the
other hand, negation is a natural linguistic concept
and extensively required when natural problems have
to be modelled declaratively. Equipped with two
different negation operators, weak (not) and strong
(¬) negations, as well as the disjunction operator
(∨) in the head of rules, the ASP based language,
namely AnsProlog is known as a most suitable declar-
ative language for knowledge representation, reason-
ing and declarative problem solving. More precisely,
combining the two negation operators, answer set se-
mantics provides the possibility for the reasoner to in-
fer the natural language based and declarative expla-
nations from the incomplete knowledge.
Therefore, in order to take advantage of the nega-
tion semantic, it is required to be considered in for-
malization and subsequently in reasoning phase. For
BridgingtheSemanticGapbetweenSensorDataandHighLevelKnowledge
25

example, considering the meaningful operators of the
answer set semantics, the interpreter is tasked to build
an AnsProlog program from the RDF/OWL axioms
and provides it for the reasoner which is aware of
these notations, called ASP Solvers. Depicted in Fig
3, the knowledge sources which are modelled with
RDF triples need to be aligned with the observations
stating detected events in the environment. Since the
ASP solver accepts AnsProlog clauses, the existence
of an ASP Interpreter is indispensable. Given a set
of RDF axioms, this interpreter creates ASP based
rules. At this moment, the created rules are ready to
be passed through the ASP Solver for inferring the
best explanations.
However, this solver due to the amount of rules
generated by the aforementioned component might
be not efficient enough. For example, the inference
process might be time consuming or even undecid-
able. In order to overcome these problems, the sec-
ond main component is required. Being able to recog-
nise the axioms absence of which raises the computa-
tional complexity, the Complexity Checker builds a
SPARQL query based on the lack of knowledge and
queries the repositories. Loosely speaking, this com-
ponent close the loop of ontology-ASP Solver for the
sake of relaxing the complexity by looking for highly
required axioms over knowledge sources.
This approach will be evaluated with data coming
from a small smart-kitchen equipped with a ZigBee
networks including ZigBee sensors and an electronic
nose that observe the environment. The data gathering
phase is under process and the objective is annotation
of the electronic nose data with the best explanation
inferred by the reasoner.
6 EXPECTED OUTCOME
All three approaches are common in the final goal,
namely annotating sensor data which can be counted
as a solution for the semantic gap problem specifically
for our electronic nose data. There are two parame-
ters discerning among these models, the effectiveness
in the sense of the time complexity and the expres-
siveness of final explanations. We will examine how
multivariate data coming from sensors which are in
company with electronic noses can promote the rea-
soning process in terms of creating the best explana-
tions.
ACKNOWLEDGEMENTS
This work has been funded by the Swedish Research
Counciln (Vetenskapsradet) under the project title
cognitive electronic noses.
REFERENCES
Alirezaie, M. and Loutfi, A. (2012). Ontology alignment
for classification of low level sensor data. In Filipe,
J. and Dietz, J. L. G., editors, KEOD, pages 89–97.
SciTePress.
Bache, K. and Lichman, M. (2013). Uci-machine learn-
ing repository. Irvine, CA: University of California,
School of Information and Computer Science.
Balduccini, M. and Girotto, S. (2010). Formalization of
psychological knowledge in answer set programming
and its application. Theory Pract. Log. Program.,
10(4-6):725–740.
Bylander, T., A. D. T. M. J. J. (1991). The computational
complexity of abduction.
Coradeschi, S., Loutfi, A., and Wrede, B. (2013). A short
review of symbol grounding in robotic and intelligent
systems. volume 27, pages 129–136. Springer-Verlag.
Eiter, T., Gottlob, G., and Leone, N. (1997). Semantics and
complexity of abduction from default theories. Artifi-
cial Intelligence, 90(12):177 – 223.
Harnad, S. (1990). The symbol grounding problem. Physica
D: Nonlinear Phenomena, 42:335–346.
Heath, T. and Bizer, C. (2011). Linked Data: Evolving the
Web into a Global Data Space. Morgan & Claypool,
1st edition.
Henson, C. A., Sheth, A. P., and Thirunarayan, K. (2012).
Semantic perception: Converting sensory observa-
tions to abstractions. IEEE Internet Computing,
16(2):26–34.
Henson, C. A., Thirunarayan, K., Sheth, A. P., and , P. H.
(2011). Representation of parsimonious covering the-
ory in owl-dl. In OWLED.
Hilbert, M. and L
´
opez, P. (2011). The world’s technolog-
ical capacity to store, communicate, and compute in-
formation. Science, 332(6025):60–65.
Joshi, R. and Sanderson, A. C. (1999). Multisensor fusion :
a minimal representation framework. Series in Intel-
ligent Control and Intelligent Automation. World Sci-
entific, Singapore, London, Hong Kong.
Loutfi, A. (2006). Odour Recognition using Electronic
Noses in Robotic and Intelligent Systems. PhD the-
sis,
¨
Orebro University,
¨
Orebro, Sweden.
Loutfi, A., Coradeschi, S., Duckett, T., and Wide, P. (2001).
Odor source identification by grounding linguistic de-
scriptions in an artificial nose. Proc. SPIE Conference
on Sensor Fusion: Architectures, Algorithms and Ap-
plications V, 4385:273–282.
Loutfi, A., Coradeschi, S., and Saffiotti, A. (2005). Main-
taining coherent perceptual information using anchor-
ing. pages 1477–1482.
IC3K2013-DoctoralConsortium
26

Melchert, J., Coradeschi, S., and Loutfi, A. (2007). Knowl-
edge representation and reasoning for perceptual an-
choring. Tools with Artificial Intelligence, 1:129–136.
Pagnucco, M. (1996). The Role of Abductive Reasoning
within the Process of Belief Revision. PhD thesis,
Basser Department of Computer Science, University
of Sydney.
Reggia, J. A. and Peng, Y. (1986). Modeling diagnostic rea-
soning: A summary of parsimonious covering theory.
Comput Methods Programs Biomed, 25(2):125–34.
Thirunarayan, K., Henson, C. A., and Sheth, A. P. (2009).
Situation awareness via abductive reasoning from se-
mantic sensor data: A preliminary report. In CTS,
pages 111–118.
BridgingtheSemanticGapbetweenSensorDataandHighLevelKnowledge
27
