
Real-time Classification of Finger Movements using Two-channel
Surface Electromyography
Khairul Anam
1,2
and Adel Al-jumaily
2
1
University of Jember, Jember, Indonesia
2
University of Technology, Sydney, Australia
Keywords: Surface EMG, Extreme Learning Machine, Finger Movements.
Abstract: The use of a small number of Electromyography (EMG) channels for classifying the finger movement is a
challenging task. This paper proposes the recognition system for decoding the individual and combined
finger movements using two channels surface EMG. The proposed system utilizes Spectral Regression
Discriminant Analysis (SRDA) for dimensionality reduction, Extreme Learning Machine (ELM) for
classification and the majority vote for the classification smoothness. The experimental results show that the
proposed system was able to classify ten classes of individual and combined finger movements, offline and
online with accuracy 97.96 % and 97.07% respectively.
1 INTRODUCTION
The electromyography signal has been used widely
to control the upper-limb prosthetic robot to recover
the quality of life of the amputee. Many attempts
have been made to decode the hand movements as
the control sources of the hand robot (Oskoei and
Huosheng, 2008): (Sang Wook et al., 2011); (Micera
et al., 2010). The dexterous control system should
involve not only the hand movements but also the
finger movements (Tenore et al., 2009); (Khushaba
et al., 2012). Some efforts have been done to
recognize the finger movements. Tenore et al
decoded ten classes of the individual finger
movements by using up to 32 sEMG channels with
accuracy ~ 90% (Tenore et al., 2009). In addition,
Al-Timemy et al (Al-Timemy et al., 2013) classified
15 individual finger movements and achieved 98 %
accuracy by using 6 sEMG channels.
The use of few numbers of electrodes in a finger
recognition system without compromising the
decoding accuracy is a challenging task. Tsenov et al
used two sEMG channels for 4 class finger
movements i.e. the thumb, index, middle finger and
hand closure with the best accuracy was nearly 93 %
in offline classification (Tsenov et al., 2006).
Moreover, Khusaba et al classified 10 classes of
individual and combined finger movements which
consisted of five individual finger movements by
using two sEMG channels (Khushaba et al., 2012).
This work could achive 92% and 90 % of accuracy
for the offline and online classification respectively.
To achieve good classification results, it
demands the proper and right decoding methods.
Tsenov employed time domain feature extractions
and Artificial Neural Networks (ANNs) to process
the sEMG signals from two channels (Tsenov et al.,
2006). This recognition system gave a good
accuracy in offline classification but no evidence in
online classification. In addition, this system only
decoded for finger movements which were only
three individual finger movements and one hand
close. More finger movements are needed in real-
time application.
The best improvement was proposed in
(Khushaba et al., 2012). The sEMG signals from two
channels were extracted by using time domain
features and reduced by Linear Discriminant
Analysis (LDA) and then classified by using Support
Vector Machine. The final results were refined by
using a Bayesian fusion vote. Ten classes of
individuated and combined finger movements were
able to recognize with 92 % offline classification
accuracy and 90% online classification accuracy.
The achievement attained by previous system is
good but not good enough for the implementation in
real-time application. Many attempts should be
made to achieve more accurate system recognition.
For that goal, this paper proposes the novel
recognition system which uses two sEMG channels
218
Anam K. and Al-Jumaily A..
Real-time Classification of Finger Movements using Two-channel Surface Electromyography.
DOI: 10.5220/0004663002180223
In Proceedings of the International Congress on Neurotechnology, Electronics and Informatics (RoboAssist-2013), pages 218-223
ISBN: 978-989-8565-80-8
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
in recognizing the individual and combined finger
movements. A number of features are extracted by
using time domain feature extraction and then
reduced by using Spectral Regression Discriminant
Analysis (SRDA) (Cai et al., 2008). SRDA is an
extension of Linear Discriminant Analysis which is
fast and able to work on a large dataset.
Extreme Learning Machine (ELM)(Huang et al.,
2012) is used for classification. ELM is generalized”
single-hidden-layer feedforward networks (SLFNs)
whose hidden layer does not need to be tuned. It
needs fewer optimization constraint, has better
generalization functioning and faster learning time
than SVM (Huang et al., 2012). This combination,
SRDA and ELM along with the majority vote (Chan
and Green, 2007), provide a fast and an accurate
classification system for individuated and combined
finger movements.
2 METHOD
2.1 Experiment Procedures
The data in this work were acquired from six
subjects, one female and five males. All subjects
were normally limbed with no muscle disorder. To
avoid the effect of position movement on EMG
signals, subject’s arm was supported and fixed at
certain position as decribed in fig. 2.(Khushaba et
al., 2012).
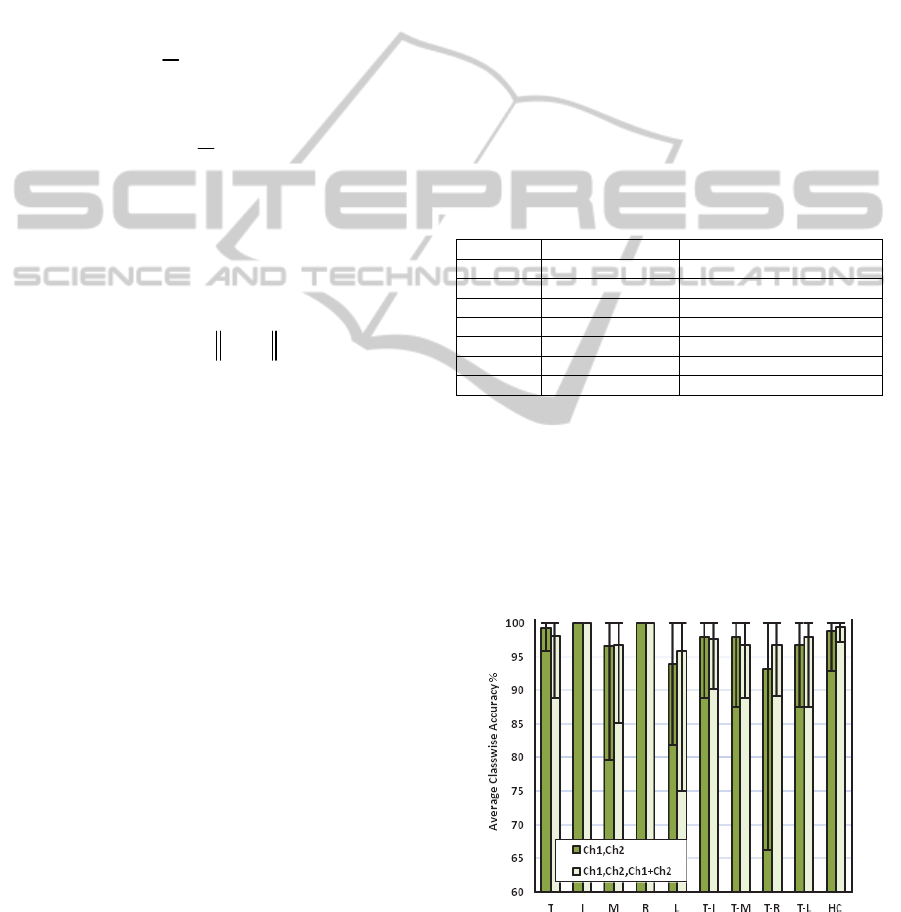
The FlexComp Infiniti™ System from Thought
Technology was used to process the signals from
two EMG MyoScan™ T9503M Sensors which were
put on the subject’s forearm as seen in the figure 1.
The acquired EMG signals were amplified to a total
gain of 1000 and sampled at 2000 Hz.
The collected EMG signals were processed in the
Matlab 2012b installed in the Intel Core i5 3.1 GHz
desktop computer with 4 GB RAM running on
Windows 7 operating system. The signals were
filtered by a band pass filter between 20 and 500 Hz
with a notch filter to remove the 50 Hz line
interference. Finally, the EMG signals were down
sampled to 1000 Hz.
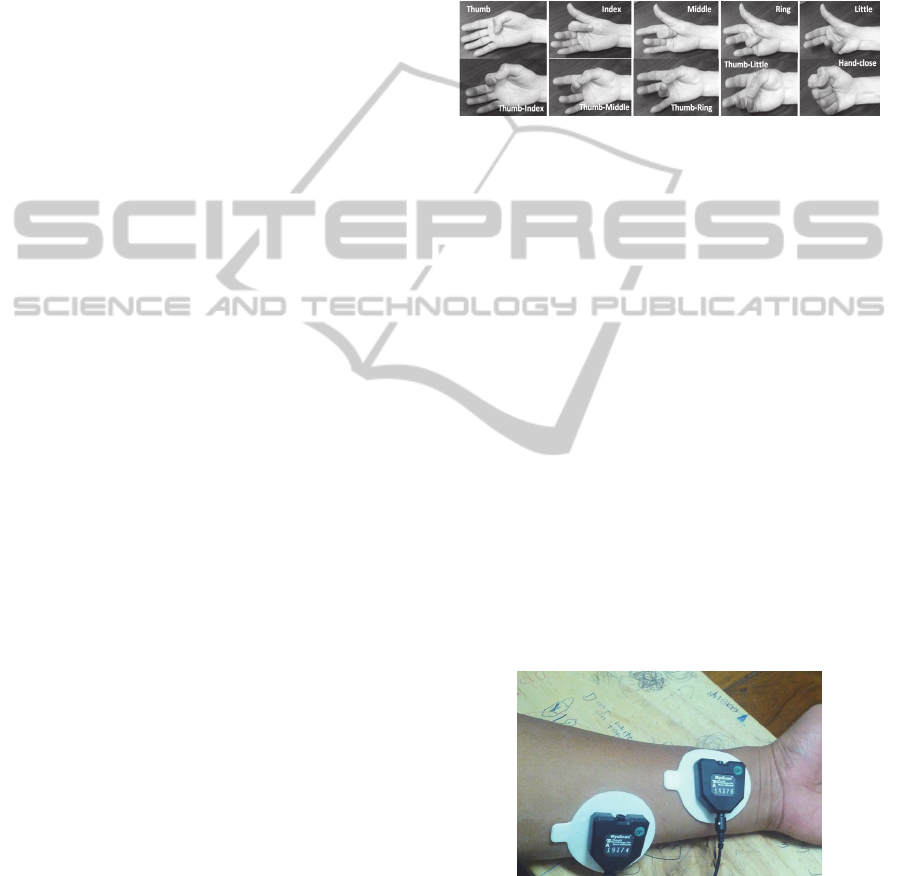
Fig. 2 shows ten classes of the individual and
combined finger movements consisting of the
flexion of individuated fingers, i.e., Thumb (T),
Index (I), Middle (M), Ring (R), Little (L) and the
pinching of combined Thumb–Index (T–I), Thumb–
Middle (T–M), Thumb–Ring (T–R), Thumb–Little
(T–L), and the hand close (HC).
The offline classification was performed based
on data from the data acquisition. In this stage, the
subjects asked to perform a certain posture of a
finger movement for a period 5 s and then take a rest
for 5 s. Each movement was repeated six times.
Therefore 30 minutes of data are collected for each
trials and 180 minutes for all repetitions. The data
collected were divided into training data and testing
data. Four of six trials were training data and the rest
were testing data.
Figure 1: Ten different finger movements.
In the online stage, the subject performed similar
activities. The difference is the repetition which is
only four times instead of six and all are for testing
only. Another difference is the recognition system is
performed each 100 ms and then the result is
displayed on the screen.
2.2 Proposed Method
The proposed recognition system consisted of two
stages, an offline and online classification stages. In
the offline stage, the EMG signals were acquired by
a data acquisition device from 6 subjects. The
filtering and windowing was applied to the collected
data before being extracted by using a time domain
feature set. To reduce the dimension of the features,
SRDA was employed. Then, the reduced data were
classified using ELM and refined by using the
majority vote. The trained ELM which is produced
by the offline classification is stored and used in the
online classification stage.
Figure 2: The electrodes placement.
In the online stage, the trained ELM is restored
and used to classify the sEMG signals which are
captured every 100 ms. The acquired signals are
extracted by using time domain feature extractions
and reduced their dimensionality by using SRDA.
Real-timeClassificationofFingerMovementsusingTwo-channelSurfaceElectromyography
219

Then, the reduced features are recognized by the
trained ELM and the output classification is refined
by using majority vote.
2.3 Feature Extraction
The features were extracted from a time domain
feature set which consists of Waveform Length
(WL), Slope Sign Changes (SSC), Number of Zero
Crossings (ZCC), and Sample Skewness (SS). In
addition, some parameters from Hjorth Time
Domain Parameters (HTD) and Auto Regressive
(AR) Model Parameters were included as used in
(Khushaba et al., 2012). All features were extracted
by using myolectric toolbox (Chan and Green, 2007)
and Biosig toolbox (Schlogl and Brunner, 2008).
The AR model parameters have been proven to
be stable and robust to the electrode location shift
and the change of signal level (Tkach et al., 2010).
Moreover, aforementioned time domain features
were windowed by using disjoint window instead of
sliding window to keep computational cost low. A
100 ms window and a 100 increments were used to
form a system which is suitable for real time
application.
2.4 SRDA
SRDA is an improvement of LDA which is better
than LDA in the computational aspect and the ability
to cope with a large dataset (Cai et al., 2008). Let
eigen problem of LDA is
TT
X
WX a XX a
(1)
where
X
(1 x c) is centered data matrix, W is
eigenvector matrix (m x m), = eigenvalue, a =
transformation vector, c = the number of classes, and
m = the number of total training data points.
Modification of the equation (1) gives:
Wy y
(2)
where
T
X
ya
(3)
The solution of LDA problem by SRDA is to get y
by solving eq (2) and then use the y obtained to find
a. To solve a, the least square sense could be
employed by using:
2
1
arg min
m
T
ii
a
i
aaxy
(4)
Regularize least square problem of SRDA, we get:
1
arg min
T
TTT
m
a
i
X
ay Xay aaa
(5)
Derivative of equation (5) gives:
T
X
XXyI
1
T
X
XXyaI
(6)
2.5 Extreme Learning Machine
ELM is a learning scheme for single layer
feedforward networks (SLFNs). While the network
parameters are tuned in classical SLFNs learning
algorithms, most of these parameters are analytically
determined in ELM. The hidden parameters can be
independently determined from the training data,
and the output parameters can be determined by
pseudo-inverse method using the training data. As a
result, the learning of ELM can be carried out
extremely fast compared to the other learning
algorithms (Huang et al., 2012).
The output function of ELM for generalized
SLFNs (for one output node case) is:
1
() ()
L
Lii
i
fx hx
h(x)
(7)
where
1
,...,
T
L
is the vector of the output
weight between hidden layer of L nodes and the
output node,
1
(),..., ()
L
hx h xh(x)
is the output
vector of hidden layer.
The objective of ELM is to minimize the error
and the norm of weight:
2
Minimize : andHT
(8)
where T is the target. For classification purpose, the
output function of ELM in equation (7) could be
modified to be:
-1
TT
1
f(x) = = + T
C
h(x) h(x)H HH
(9)
where
1
11 1
N1N N
(x )
(x ) (x )
=
(x ) (x ) (x )
L
L
hh
hh
h
H
h
(10)
as well as C is a user-specified parameter and N is
the number of the training data. In the equation (10),
NEUROTECHNIX2013-InternationalCongressonNeurotechnology,ElectronicsandInformatics
220
h(x) is a feature mapping (hidden layer output
vector) which can be:
11
h(x) ( , , x),..., ( , , x)
LL
Ga b Ga b
(11)
where G is a non-linear piecewise continuous
function such as sigmoid, hard limit, Gaussian, and
multi quadratic function.
If the feature mapping h(x) is unknown to the
user, a kernel function can be used to represent h(x).
Then, the equation (9) would be:
-1
TT
1
-1
N
ELM
1
f(x) = + T
C
(x,x )
1
= + T
C
(x,x )
K
K
h(x)H HH
(12)
where
T
ELM ELM ,
:(x).(x)(x,x)
ij i j i j
hh K HH
and K is a kernel function such that :
2
()expK
,uv u v
(13)
2.6 Majority Vote
The majority vote was used to refine the
classification results. It utilizes the results from the
present state and n previous states and makes a new
classification result based on the class which appears
most frequent. This procedure produces the finger
movement class that removes specious
misclassification. Besides majority vote, the
transition states in the classification results are
removed too. This method gives the recognition
system that works in steady state only regardless the
transition state.
3 RESULT AND DISCUSSION
The two experiments have been performed, the
offline and online classification. In the offline stage,
the possibility of adding new channel which was
extracted from summing up of two original channels
is verified. Next, the best result of the offline stage
was utilized in the online classification stage. In the
both offline and online stage, the signals were
extracted from six subjects with 100 ms windows
length and100 increment as recommended in
(Khushaba et al., 2012). In addition, the Gaussian
kernel based ELM is used as the classifier. It has two
importance parameters, C and as showed in
equation 9 and 12. This paper used the optimized
ELM presented in the (Anam et al., 2013) with the
=2
-5
and C=2
0
. The majority vote method with 9
decision voting was employed to refine the
classification result.
The first experiment was the offline
classification. In this stage, the performance of the
classification system using only two original signals
(ch1, ch2) was compared to the two signals plus the
new additional channel from summing up of the
both channels (ch1, ch2, ch1+ch2). From six trials
across each subject, four trials were used to train the
ELM and the rest were the testing data. The
classification result is shown in the table 1.
Table 1: The classification results averaged for six
subjects.
Subject Ch1 & Ch2 (%) Ch1, Ch2, Ch1+Ch2 (%)
1 98.48 ± 2.87 97.10 ± 4.13
2 100.00 ± 0 100.00 ± 0
3 94.95 ± 11.38 96.42 ± 8.26
4 98.61 ± 3.93 98.34 ± 4.02
5 98.89 ± 2.43 98.89 ± 3.51
6 93.81 ± 8.39 96.99 ± 5.49
Average 97.46 ± 2.35 97.96 ± 1.47
Table 1 shows that both configurations achieved good
accuracies across six subjects. However, the additional
signal of the summation of two channels gave better
average accuracy than two channels only even though the
difference is not so significant. The significance of the
second configuration is depicted in figure 3. Even though
both configurations achieve similar accuracy in
recognizing the ten finger movements, the standard
deviation of second one is better than first one.
Figure 3: The Average class-wise accuracy in the offline
classification.
Real-timeClassificationofFingerMovementsusingTwo-channelSurfaceElectromyography
221
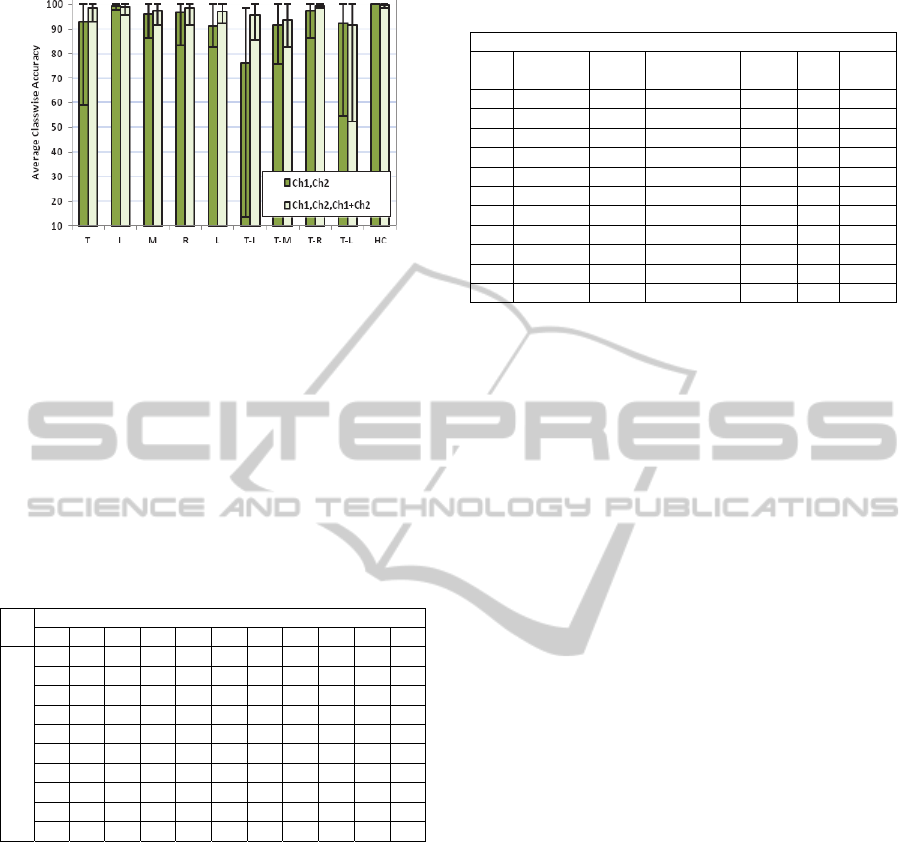
Figure 4: The online classification accuracy.
The online classification is the second
experiments performed. The individual and
combined finger movements were recognized in
real-time based on the matrix projection of SRDA
and the trained ELM kernel from offline stage. In
this experiments, the configuration of (ch1, ch2)
achieve 93.36 % accuracy while the (ch1,ch2,
ch1+ch2) configuration attained better accuracy
which is 97.07 %. The performance of finger
recognition is depicted in the fig.4 and the table 2.
Table 2: The confusion matrix of the classification results
averaged for SIX subjects.
Intended task (%)
T I M R L T-I T-M T-R T-L HC
Classified task (%)
T 98.7 0.1 0.0 0.0 0.0 0.9 0.0 0.0 0.0 0.3
I 0.0 99.3 0.0 0.0 0.0 0.3 0.0 0.0 0.4 0.0
M 0.0 0.0 98.0 0.2 0.0 0.0 1.3 0.0 0.0 0.5
R 0.0 0.0 0.0 99.9 0.0 0.0 0.0 0.1 0.0 0.0
L 1.1 0.0 0.0 0.0 97.2 0.6 0.0 0.0 0.1 1.0
T-I 0.5 0.0 0.0 0.0 1.5 95.1 1.0 0.0 1.9 0.0
T-M 0.0 0.0 0.9 0.0 0.7 1.3 96.1 0.0 0.1 1.0
T-R 0.0 0.0 0.0 0.0 0.0 0.3 0.5 99.1 0.0 0.0
T-L 0.0 0.1 0.0 0.0 6.0 0.3 0.7 0.5 92.3 0.0
HC 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.2 0.0 99.8
Figure 4 shows that the T-L movement is the most
difficult one to recognize. It was misclassified to the L
movements as seen in the confusion matrix table 2. It was
probably caused by the facts that the T-L was composed of
Thumb(T) and Little(L) finger movement therefore there
is possibility each movement affects the combined
movements.
Besides the classification performance, the
processing time of the real-time application has been
also tested which the result is presented in table 3.
The acquisition, filtering, feature extraction and
reduction, ELM and majority vote processing time
were record during the experiment. This recognition
system took 112.13 ms in average. It is verified that
processing time of this system is in between the
optimal processing time for real-time myoelectric
control, 100-125 ms, as suggested in (Farrell and
Weir, 2007).
Table 3: The processing time of the online experiment.
Processing time (ms)
Class Acquiring Filter
Extraction
/reduction
ELM Vote Total
T 100 3.9 7.6 0.5 0.1 112.1
I 100 3.5 7.2 0.5 0.1 111.3
M 100 3.5 7.3 0.5 0.1 111.4
R 100 3.6 7.4 0.5 0.1 111.6
L 100 3.7 7.6 0.6 0.1 111.9
T-I 100 3.5 7.3 0.5 0.1 111.4
T-M 100 3.6 7.5 0.5 0.1 111.7
T-R 100 3.6 7.6 0.6 0.1 111.8
T-L 100 3.5 7.3 0.5 0.1 111.4
HC 100 3.5 7.3 0.5 0.1 111.4
Avg 100 3.6 7.4 0.5 0.1 112.1
This promising result could be implemented to
the hand exoskeleton to recover the motor function
of the patients post stroke. It could move all
individual fingers and some combined movements.
However, it is aimed for finger extension only. In
addition, it would not work properly if the EMG
signal of the subject is very weak. Therefore, it
could be only applied to the partially paralyzed
subject.
Furthermore the proposed system could be
implemented to the prosthetic hand device. It is
promising because it used few electrodes which
enhance the user's comfort. However, it needs more
validation for amputee subjects.
4 CONCLUSIONS
The two channel sEMG signals were used in this
paper to recognize the ten individual and combined
finger movements. The extracting more feature from
summation of the signals from the two channels
improves the classification accuracy in both offline
and online classification system. By using this
combination, the recognition system was able to
achieve in average 97.96 % in offline and 97.07% in
online one. These results show the feasibility of the
proposed system in classifying ten different finger
movements.
REFERENCES
Al-Timemy, A. H., Bugmann, G., Escudero, J. & Outram,
N. 2013. Classification of Finger Movements for the
Dexterous Hand Prosthesis Control with Surface
Electromyography. Biomedical and Health
Informatics, IEEE Journal of, 17, 608-618.
Anam, K., Khushaba, R. & Al-Jumaily, A. 2013. Two-
Channel Surface Electromyography for Individual and
NEUROTECHNIX2013-InternationalCongressonNeurotechnology,ElectronicsandInformatics
222

Combined Fingers Movements. Accepted paper in
2013 Annual International Conference of the IEEE
Engineering in Medicine and Biology Society,EMBC.
Osaka.
Cai, D., He, X. & Han, J. 2008. SRDA: An efficient
algorithm for large-scale discriminant analysis. IEEE
Transactions on Knowledge and Data Engineering,
20, 1-12.
Chan, A. D. C. & Green, G. C. Myoelectric control
development toolbox. Proceedings of 30th Conference
of the Canadian Medical & Biological Engineering
Society, 2007. M0100-1.
Farrell, T. R. & Weir, R. F. 2007. The Optimal Controller
Delay for Myoelectric Prostheses. Neural Systems and
Rehabilitation Engineering, IEEE Transactions on,
15, 111-118.
Huang, G. B., Zhou, H., Ding, X. & Zhang, R. 2012.
Extreme learning machine for regression and
multiclass classification. IEEE Transactions on
Systems, Man, and Cybernetics, Part B: Cybernetics,
42, 513-529.
Khushaba, R. N., Kodagoda, S., Takruri, M. &
Dissanayake, G. 2012. Toward improved control of
prosthetic fingers using surface electromyogram
(EMG) signals. Expert Systems with Applications.
Micera, S., Carpaneto, J. & Raspopovic, S. 2010. Control
of Hand Prostheses Using Peripheral Information.
IEEE Reviews in Biomedical Engineering, 3, 48-68.
Oskoei, M. A. & Huosheng, H. 2008. Support Vector
Machine-Based Classification Scheme for Myoelectric
Control Applied to Upper Limb. IEEE Transactions
on Biomedical Engineering, 55, 1956-1965.
Sang Wook, L., Wilson, K. M., Lock, B. A. & Kamper, D.
G. 2011. Subject-Specific Myoelectric Pattern
Classification of Functional Hand Movements for
Stroke Survivors. IEEE Transactions on Neural
Systems and Rehabilitation Engineering, 19, 558-566.
Schlogl, A. & Brunner, C. 2008. BioSig: a free and open
source software library for BCI research. Computer,
41, 44-50.
Tenore, F. V. G., Ramos, A., Fahmy, A., Acharya, S.,
Etienne-Cummings, R. & Thakor, N. V. 2009.
Decoding of individuated finger movements using
surface electromyography. IEEE Transactions on
Biomedical Engineering, 56, 1427-1434.
Tkach, D., Huang, H. & Kuiken, T. A. 2010. Study of
stability of time-domain features for
electromyographic pattern recognition. Journal of
NeuroEngineering and Rehabilitation, 7, 21.
Tsenov, G., Zeghbib, A. H., Palis, F., Shoylev, N. &
Mladenov, V. Neural Networks for Online
Classification of Hand and Finger Movements Using
Surface EMG signals. 8th Seminar on Neural Network
Applications in Electrical Engineering (NEUREL), 25-
27 Sept. 2006 2006. 167-171.
Real-timeClassificationofFingerMovementsusingTwo-channelSurfaceElectromyography
223
