
Human Motion Assistance using Walking-aid Robot and Wearable
Sensors
Jian Huang
1
, Wenxia Xu
1
, Samer Mohammed
2
and Zhen Shu
1
1
School of Automation, Huazhong University of Science and Technology, Luoyu Road, Wuhan, China
2
LISSI Lab, University Paris Est Créteil (UPEC), Paris, France
Keywords: Walking-Aid Robot, Wearable Sensors, Fall Detection.
Abstract: An omni-directional walking-aid robot is developed for the elderly in this study. A motion control strategy
of walking-aid robot based on observing human status by wearable sensors is proposed. During normal
walking, the robot is controlled by a conventional admittance control scheme. When the tendency of a fall is
detected, the robot will immediately react to prevent the user from falling down. The distance between the
human Centre of Pressure (COP) and the midpoint of two human feet is assumed to be a significant feature
to detecting the fall events. Dubois possibility theory is applied to describe the membership function of
‘normal walking’ state. A threshold based fall detection approach is obtained from online evaluation of the
walking status. Finally, experiments demonstrate the validity of the proposed strategy.
1 INTRODUCTION
The elderly people population is rapidly increasing
in developing and developed countries. The increase
of human average lifespan escalated the need for
elderly-care technologies (Alwan 2008). This
increase along with a shortage of skilled caregivers
presents an opportunity for robotic applications to
address some of the disparities in elderly patient
care. In addition, as many elderly and handicapped
people suffer from lower extremity deceases,
increasing demand for walking aid devices has
increased. Robotic applications such as walking-aid
robots to assist the elderly in daily activities and to
help the elderly regain independence and an
increased quality of life will play an important role
in the rehabilitative care systems of increasingly
aging societies (Jonsson, 2001) and (Mohammed,
2012).
The current walking-aid robot systems proposed
so far may be classified into two groups according to
mobility factor, i.e., the system moving on the
ground according to the motion of the subjects and
the system giving effects of walking to the subjects
(Lee et al. 2004). The former system is active-type
walker (Dubowsky, 2000) and (Hirata, 2003) which
is driven by servo motor. The latter corresponds to a
system driven by servo brakes and is passive-type
walker (Rentschler, 2003) and (Hirata, 2004).
Most of current walking-aid robots only consider
the motion control when user is in the normal
walking states (Huang, 2008) and (Wakita, 2012),
but did not discuss the motion control when user is
in abnormal gait situation such as falling down.
Falling down is a major cause of fatal injury
especially for elderly and may create a serious
obstruction for independent living (Griffiths, 2008).
The development of walkers should also be based on
improving the ability of interaction based on the data
from the environment and especially the user to
develop monitoring systems especially for fall
detection and fall prevention.
Force control techniques including impedance
and admittance control methods are widely used in
walking-aid robot motion control because they
enable user-friendly Human-Robot-Interfaces (HRI)
that transform interaction forces from the user to the
desired robot motion velocity. Whereas it is difficult
to identify emergency cases (e.g. stumbling or
slipping) by only using force measurement, and
impractical to detect accurate phases of gait training
without human body status, intelligent technologies
such as wearable sensors and model based
estimation approaches allow the realization of
suitable motion control to correctly respond to
emergency cases and gait training phases. Therefore
wearable sensors are used to detected human body
status in this paper.
199
Huang J., Xu W., Shu Z. and Mohammed S..
Human Motion Assistance using Walking-aid Robot and Wearable Sensors.
DOI: 10.5220/0004664101990204
In Proceedings of the International Congress on Neurotechnology, Electronics and Informatics (RoboAssist-2013), pages 199-204
ISBN: 978-989-8565-80-8
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
Wearable device based fall detection method
mainly relies on various sensors to detect the motion
and location of the body of the user (Mubashir,
2013). To analyse the output of a waist
accelerometer, researchers use variance and average,
kurtosis and skewness statistics to realize eight kinds
of activities such as walking, climbing, running,
standing, sitting, and lying prone (Baek, 2004).
Masaki (Masaki, 2002) classified the output of waist
accelerometers during human climbing motion using
fractal analysis method based on a wavelet transform
process. Wang (Wang, 2007) obtained data from a
3-axis waist accelerometer, then used 33 different
time-domain characteristics to classify the five
different types of gaits characteristic of walking on
flat ground, uphill, downhill, upstairs and
downstairs. In this paper, the force sensors are used
to ensure motion control while the wearable sensors
are used to detect user’s gait through fall
classification into three fall gestures.
First, the walking-aid robot and its motion
control algorithm are introduced. The framework of
the fall detection system based on observing human
status by wearable sensors is presented in section 3.
Having such data, the test results of proposed
algorithm are shown in chapter 4. The conclusions
would be the last part of this article.
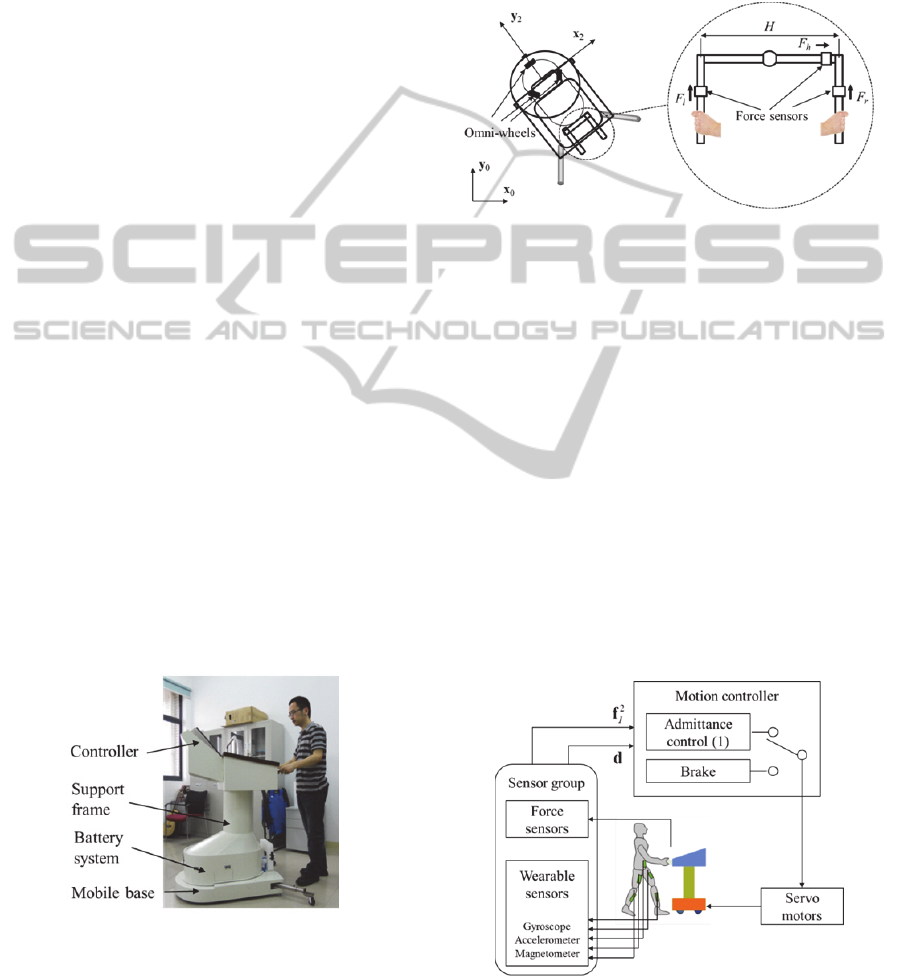
2 WALKING-AID ROBOT
The prototype of an omni-directional walking-aid
robot proposed in our previous work (Ye 2012) is
illustrated in Fig. 1. The robot consists of an omni-
directional base, a support frame, a motion controller
and a battery system.
Figure 1: Omni-directional walking-aid robot.
The omni-directional mobile base comprises
three commercial Sweden wheels and actuators.
Several passive casters are also mounted on the base
to widen the support area so as to enhance the
stability. Coordinate systems are depicted in Fig. 2.
System {0} is the reference coordinate system and
{1} is a local system fixed to the robot. Three one-
dimensional force sensors are used to measure the
interaction forces between the robot and its operator.
Both the forward and lateral forces can be obtained,
as well as the exerted rotation torque.
Figure 2: Robot coordinate system (top view) and
measurement of interaction forces.
By using the force sensor array, the measured
interaction force vector represented in {2} is denoted
by
2
I
f
which can be calculated from the measured
forward and lateral forces. During normal walking, a
conventional admittance control is assumed to
generate a comfortable human-robot interaction
(HRI). The control algorithm is then given by
222
RRI
Mv Bv f
(1)
where
2
R
v
is the robot velocity vector in system {2}.
,,M
xyz
Mdiag M M
is the virtual mass
parameter matrix and
,,B
xyz
Bdiag B B
is the
virtual damping parameter matrix.
Figure 3: The motion control block diagram of the system.
There are many possible walking modes during
the operation of the walking-aid robot. In this paper,
NEUROTECHNIX2013-InternationalCongressonNeurotechnology,ElectronicsandInformatics
200
we divided all possible human walking states into
two modes, ‘normal walking’ and ‘emergency’.
During ‘normal walking’ mode, the admittance
control strategy (1) is assumed. Wearable sensors
are used to detect the occurrence of ‘emergency’
including stumbling or slippage. If an emergent state
is detected, the walking-aid robot is quickly braked
to prevent the operator from falling down. The
whole control architecture is depicted by Fig. 3. The
fall detection approach is illustrated in the following
sections.
3 FALL DETECTION METHOD
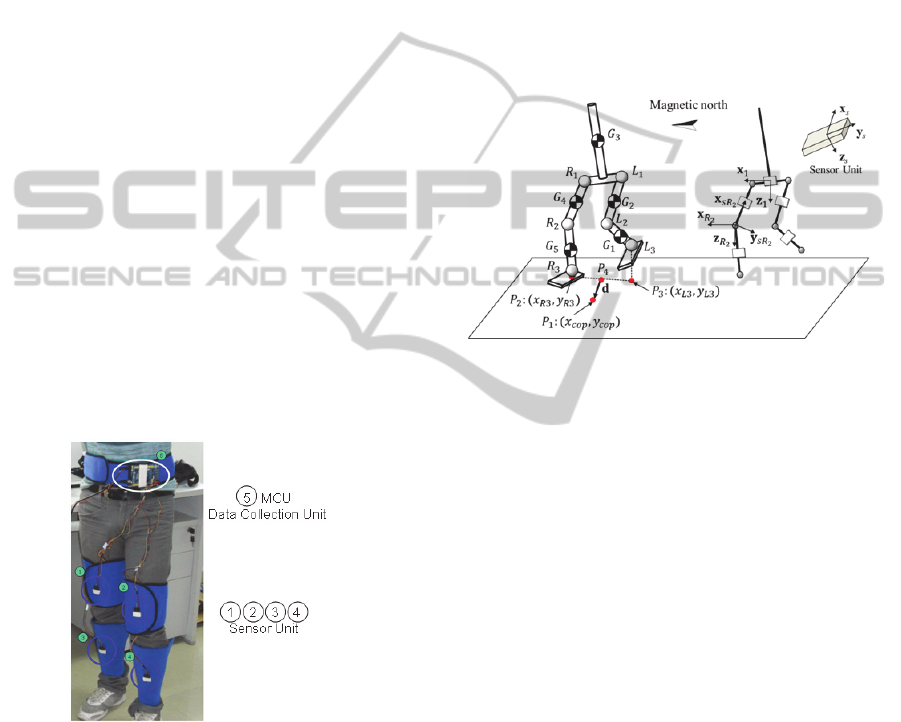
3.1 Wearable Sensors
A wearable sensor unit consists of a tri-axial
magnetometer, a tri-axial accelerometer and a tri-
axial gyroscope for measuring the acceleration and
the angular velocity along three orthogonal axes
simultaneously. All sensor units were checked on a
mechanical turntable to establish offset values for
sensor data in addition to obtaining inclination
relationships of the measured values.
The wearable sensor units are placed on five
body segments, including both shanks, both thighs
and waist (see Fig. 4).
Figure 4: Wearable gait recognition sensor units.
3.2 Gait Recognition
Firstly, several coordinate systems are defined to
fulfil the gait recognition (see Fig. 5). System {1} is
the human reference coordinate system which is
fixed at the waist level with the z-axis pointing to
the ground and the x-axis to the magnetic north
direction. The direction of y-axis of system {1} is
obtained following the right hand rule. For each joint
point, there are two coordinate systems. For example,
system
2
R
is a coordinate system that is fixed on
point R
2
and has the same orientation as system {1}.
System
2
sR
is a sensor coordinate system that is
fixed on point R
2
with same orientation as a local
sensor coordinate system {s}. The z-axis is
perpendicular to the sensor surface and the x-axis
points upward and is parallel to the sensor surface.
For any other joint point P, similar coordinate
systems {P} and {sP} are similarly defined.
Normally, the sampled wearable gait recognition
sensory data are represented in the corresponding
sensor coordinate system.
Figure 5: Coordinate definition of gain recognition task.
Due to motion acceleration, the accelerometer
output is a synthetic acceleration which consists of
gravity acceleration and motion acceleration.
Kalman filtering algorithm is used to suppress the
adverse impact of motion acceleration, and then to
estimate the gravity acceleration and geomagnetic
intensity in a sensor coordinate system (Zhu 2004).
For any sensor unit, the model of Kalman filter is
given by:
() ()( 1) ()
() ( 1) ()
nnn n
nn n
sAs w
zs v
(2)
where matrix
A
is composed of gyroscope
measurements
x
,
y
and
z
.
The state vector satisfies
()
T
ggg
xyz x y z
ngggHHH
s
(3)
where g
x
, g
y
and g
z
are the acceleration components
of gravity represented in system {sP}.
,,
ggg
xyz
HHH
is the geomagnetic intensity vector represented in
system {sP}.
The observation vector satisfies
()
T
xyzxyz
naaahhh
z
(4)
HumanMotionAssistanceusingWalking-aidRobotandWearableSensors
201

where
zyx
aaa ,,
are the outputs of accelerometer and
zyx
hhh ,,
are the outputs of magnetometer.
()nw
is
a covariance matrix of process noise.
()nv
is a
covariance matrix of sensor output noise.
The pitch, roll and yaw angle (
,
,
) of any
sensor unit can be calculated as follows:
0
arctan( / )
00
arctan( / )
00
arctan( / )
00
/2
00
/2
z
xz
xz
xz
xz
xz
xz
xz
g
gg
gandg
gg
gandg
gg
gandg
g and g
(5)
0
arctan( / )
00
arctan( / )
00
arctan( / )
00
/2
00
/2
x
yx
yx
yx
yx
yx
yx
yx
g
gg
gg
gg
gg
gg
gg
gg
H
HH
HandH
HH
HandH
HH
HandH
HandH
(6)
22
arctan( / )
yx z
gg g
(7)
After estimating these angles of all sensor unit, the
coordinate values of all joint points (L
i
and R
i
with
i=1, 2, 3) and segment COG points (G
i
with i=1,
2, …, 5) can be easily obtained because the length of
each segment is known. Then, the real-time gait is
well described by all the point coordinate values.
3.3 Fall Detection Method
We investigated forward, left lateral and right lateral
fall in this study. The Centre of Pressure (COP)
point, which is equivalent to the well-known Zero
Moment Point (ZMP), is a good feature to decide
whether a fall occurs (Lee, 2006). It is observed that
while human is walking, the COP is nearby the
supporting foot. If the distance between the COP and
supporting foot suddenly increases, a fall may
happen.
In the case of an elderly operating the walking-
aid robot, the acceleration of human body is usually
small. The COP can then be approximated by
i
i
i
i
i
cop
i
i
i
i
i
cop
m
ym
y
m
xm
x ,
(8)
where
(, )
cop cop
x
y is the coordinate value of
approximated COP on the ground.
i
m
is the mass of
the i-th segment of human body and
(, ,)
iii
x
yz is
the coordinate value of point G
i
in system {1}.
To identify whether a fall occurs, a significant
feature is assumed based on the relative position
between the COP and the midpoint of two feet. This
feature is denoted by vector d (see Fig. 5), which
can be calculated as
33 33
,
22
LR LR
cop co
T
p
xx yy
xy
d
(9)
where
333
(, ,)
LLL
x
yz and
333
(, ,)
RRR
x
yz are the
coordinate values of points L
3
and R
3
.
Empirically, when the user is falling down the
norm of d will increase suddenly in a certain
direction. We investigate the distribution of
d
during the normal walking state by Dubois
possibility theory (Dubois 2003). Similar
distribution was regarded as normal distribution and
estimated to infer the user's walking state.
Firstly, the probability distribution
},2,1:)({ hjnp
j
is calculated by dividing the
height of each bin by the total number of sample
points of normal walking.
h
is the number of bins
for a histogram. Each bin is represented by the
centre of interval denoted by n
j
. The possibility
distribution
},2,1:)({ hjn
j
is deduced from
the probability distribution by the bijective
transformation of Dubois and Prade defined by
h
j
jkk
npnpn
1
)](),(min[)(
(10)
Note that the smaller
d
is, the more stable the
human walks. We propose the membership function
)(
for ‘normal walking’ as follows:
()max
k
k
n
n
d
d
(11)
Based on the above definitions, a very simple fall
detection algorithm can described as: (assuming the
human walking behaviour is monitored at discrete
times, t denotes the current time)
Algorithm 1: (Fall detection).
IF
(())tc
d
AND
(( 1))tc
d
AND … AND
(( ))tk c
d
,
THEN a fall is detected.
NEUROTECHNIX2013-InternationalCongressonNeurotechnology,ElectronicsandInformatics
202
where constant c is a small positive number which
indicates a very low possibility of ‘normal walking’
state. k is assumed to remove disturbance.
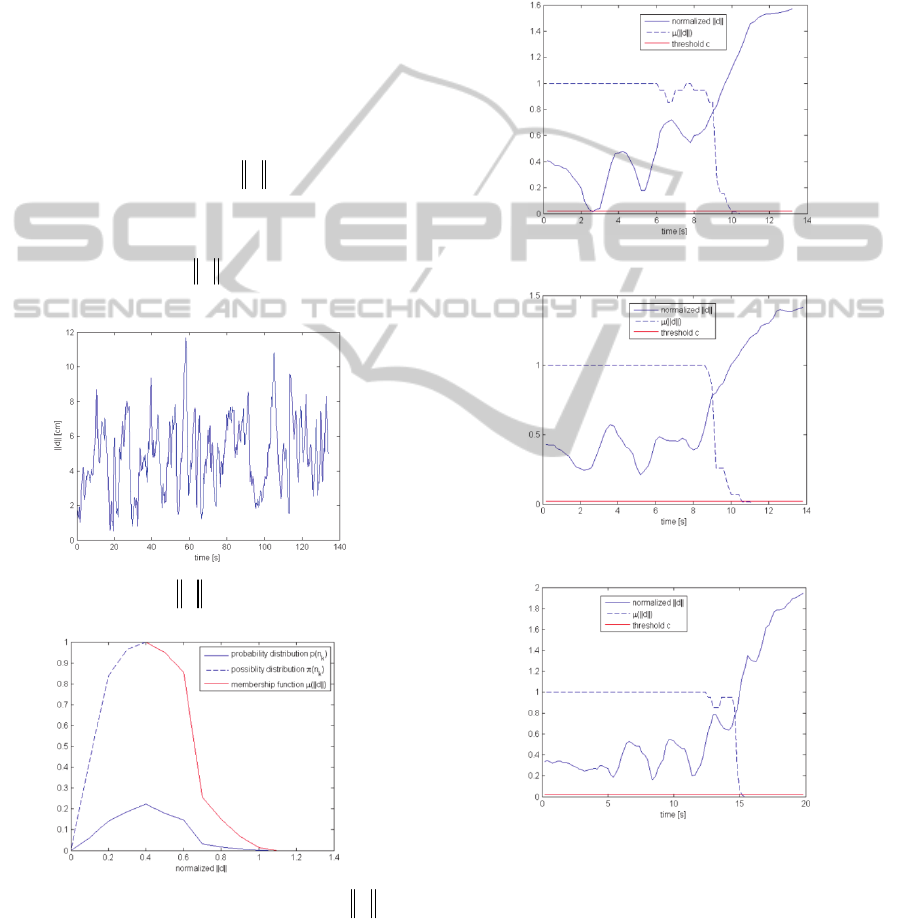
4 EXPERIMENT
In this section, several experiments were performed
using wearable sensor group to detect human
walking gait and falls, as described previously to
verify the validity of fall detection method.
Firstly, the possibility distribution of ‘normal
walking’ was obtained as well as the membership
function used in the fall detection algorithm. The
subject was requested to walk normally for about
two minutes. The trajectory of
d
is shown by Fig.
6. Assuming h=10, the probability distribution
()
k
p
n , possibility distribution ()
k
n
and
membership function
()
d
for ‘normal walking’
are calculated and depicted in Fig. 7.
Figure 6: Trajectory of
d
during ‘normal walking’.
Figure 7: Probability, possibility distributions of
d
and
the membership function of ‘normal walking’.
After obtaining the membership function, several
fall detection experiments were performed. The
subject was requested to intentionally fall forward,
left and right after walking along with the robot for a
while. Constant c is chosen as 0.02. The experiment
results of the three cases of falling down are
illustrated in Fig. 8, 9 and 10. Applying fall
detection algorithm 1, the falls were detected around
10 [sec], 11 [sec] and 15 [sec]. This is coincident to
the real experiment and the robot was safely braked
to prevent further falling down.
Figure 8: Experiment results of fall forward.
Figure 9: Experiment results of left lateral fall.
Figure 10: Experiment results of right lateral fall.
5 CONCLUSIONS
In this paper, we proposed a motion control of
walking-aid robot based on observing human status
by wearable sensors. During normal walking, the
robot is controlled by a conventional admittance
HumanMotionAssistanceusingWalking-aidRobotandWearableSensors
203

control strategy. If any fall is detected by wearable
sensors the robot will stop immediately to prevent
the user from falling down. The proposed fall
detection scheme is based on a threshold approach
considering the distance between the COP and
midpoint of two feet of user. Possibility theory was
applied to describe the membership function of
‘normal walking’. The effectiveness of proposed
methods is confirmed through experiments.
ACKNOWLEDGEMENTS
This work was supported by the International
Science & Technology Cooperation Program of
China "Precision Manufacturing Technology and
Equipment for Metal Parts" under Grant
No.2012DFG70640 and by International Science &
Technology Cooperation Program of Hubei Province
"Joint Research on Green Smart Working Assistance
Rehabilitant Robot" under Grant No.
2012IHA00601.
REFERENCES
Alwan, M., Felder, R. A., 2008. Eldercare Technology for
Clinical Practitioners Totowa, NJ: Humana Press.
Baek J., Lee G., Park W., et al. 2004. Accelerometer
Signal Processing for User Activity Detection.
Knowledge-Based Intelligent Information and
Engineering Systems Lecture Notes in Computer
Science, 32(15): 610-617.
Dubowsky, S., Genot, F., Godding, S., K. Skwersky, H. A.
Yu, H., and Yu, L., 2000. Pamm—A robotic aid to the
elderly for mobility assistance and monitoring: A
“helping-hand” for the elderly, Proceeding of IEEE
International Conference on Robotics and
Automation, San Francisco, CA, 570-576.
Dubois D., Prade H., 2003. Possibility Theory and Its
Applications: A Retrospective and Prospective View.
Proceeding of IEEE International Conference on
Fuzzy Systems, 25-28.
Griffiths, C., Rooney, C., Brock, A., 2008. Leading causes
of death in England and Wales—how should we group
causes? Health Statistics Quarterly 28. Office for
National Statistics.
Hirata, Y., Baba, T., and Kosuge, K., 2003. Motion
control of omni-directional type walking support
system ‘walking helper’, Proceeding of ROMAN,
Millbrace, CA, 85-90.
Hirata, Y., Hara, A., Kosuge, K., 2004. Passive-type
Intelligent Walking Support System “RT Walker”,
Proceedings of the 2004 IEEE/RSJ International
Conference on Intelligent Robots and Systems, 3871-
3876.
Huang J., Di P., Wakita, K., Fukuda, T., Sekiyama, K.,
2008. Study of Fall Detection Using Intelligent Cane
Based on Sensor Fusion. 2008 International
Symposium on Micro-Nano Mechatronics and Human
Science, 495-500.
Huang, J., Di, P.; Fukuda, T., Matsuno, T., 2008. Motion
control of omni-directional type cane robot based on
human intention. IEEE/RSJ International Conference
on Intelligent Robots and Systems, IROS, 273-278.
Jonsson, L., 2001. The Importance of the 4-
WheeledWalker for Elderly Women Living in their
Home Environment, The Swedish Handicap Institute.
Lee, C. Y., Jeong, I. K., Lee, I. H., 2004. Development of
Rehabilitation Robot Systems for Walking-Aid,
Proceeding of IEEE International Conference on
Robotics & Automation, New Orleans, LA. 3: 2468-
2473.
Lee H. J., Chou L. S., 2006. Detection of Gait Instability
Using the Center of Mass and Center of Pressure
Inclination Angles. Archives of Physical Medicine and
Rehabilitation, 87(4): 569-575.
Masaki S., Toshiyo T., Metin A., etc al. 2002.
Discrimination of Walking Patterns Using Wavelet-
Based Fractal Analysis, IEEE transactions on neural
systems and rehabilitation engineering, 10(3): 188-
196.
Mohammed, S., Yacine A. and Hala R., 2012. Lower-limb
movement assistance through wearable robots: state of
the Art and challenges. Advanced Robotics, 26(1-2): 1-
22.
Mubashir, M., Shao, L., Seed, L., 2013. A survey on fall
detection: Principles and approaches.
Neurocomputing, 100(16): 144-152.
Rentschler, A. J., Cooper, R. A., Blaschm, B., Boninger,
M. L., 2003. Intelligent walkers for the elderly
Performance and safety testing of VA-PAMAID
robotic walker, Journal of Rehabilitation Research
and Development, 40(5): 423-432.
Wang N., Eliathamby A., Nigel H. L., Branko G. C., 2007.
Accelerometry Based Classification of Walking
Patterns Using Time-frequency Analysis, Proceedings
of the 29th Annual International, Conference of the
IEEE EMBS, Lyon, France, 4899-4902.
Wakita K., Huang J., Di P., Sekiyama K., Fukuda T.,
2012. Human-Walking-Intention-Based Motion
Control of an Omnidirectional-Type Cane Robot.
IEEE/ASME Trans on Mechatronics. (Online
Available)
Ye J. Y., Huang J., He J. P., Tao C. J., Wang X. T., 2012.
Development of a width-changeable intelligent
walking-aid robot. IEEE International Conference on
Micro-Nano Mechatronics and Human Science, 358-
363.
Yu H., Spenko M., Dubowsky S., 2003. An adaptive
shared control system for an intelligent mobility aid
for the elderly, Autom. Robots, 15(1): 53-66.
Zhu R., and Zhou Z. Y., 2004, A Real-Time Articulated
Human Motion Tracking Using Tri-Axis
Inertial/Magnetic Sensors Package. IEEE Transactions
on Neural Systems and Rehabilitation Engineering,
12(2): 295-302.
NEUROTECHNIX2013-InternationalCongressonNeurotechnology,ElectronicsandInformatics
204
