
Human-based Lower Limb Movement Assistance and Rehabilitation
through an Actuated Orthosis
Samer Mohammed, Hala Rifai, Walid Hassani and Yacine Amirat
LISSI Lab, University of Paris Est Cr´eteil-(UPEC), 122 Rue Paul Armangot, Vitry Sur Seine, France
Keywords:
Wearable Robots, Movement Assistance, Rehabilitation Robotics.
Abstract:
In this paper, an overview of the project EICOSI (Exoskeleton Intelligently COmmunicating and Sensitive to
Intention) conducted at the LISSI/UPEC Lab will be presented. This work aims to control a knee joint actuated
orthosis while tracking a desired trajectory or following the wearer’s intention. The proposed control strategies
ensure satisfactory performances in terms of trajectory tracking, intention detection and torque generation
during rehabilitation tasks and assistive movements of the wearer’s lower limbs.
1 INTRODUCTION
The last decade has shown great advances in the de-
velopment of robots that interact closely with human.
The sensor and actuator technologies have also shown
great evolution particularly in terms of energy, porta-
bility and miniaturization. The related applications
concern chiefly the assistance and rehabilitation of de-
pendent/elderly people. In 2000, more than 60 million
people in Europe were aged 65 or over. The rise in
life expectancy,set to continue, combined with falling
birth rates, will accelerate the ageing of the popula-
tion (Mohammed et al., 2012). This will certainly
have a great impact on the development of assisting
robotic devices. An exoskeleton is a mechanical ac-
tuated structure with several degrees of freedom en-
abling the assistance or rehabilitation at multiple joint
levels such as the robot suit HAL (Tsukahara et al.,
2010). Particularly, the knee orthoses have been de-
veloped to tackle musculoskeletal impairments at the
knee joint level. The main pointed purposes are the
rehabilitation and the assistance. To ensure the first
purpose, passive or active rehabilitation can be en-
sured. A patient-directed orthosis is used after to-
tal knee arthroplasty for knee stiffness reduction and
range of motion increase by executing static progres-
sive stretches in (Bonutti et al., 2010). The reha-
bilitation has also been addressed in (Schmitt et al.,
2004) using the hybrid orthosis cyberthosis, activated
by a functional electrical stimulation of the muscles
and controlled using a proportional, integral, deriva-
tive (PID) controller in order to train the knee joint
and the muscles actuating it, for flexion/extension
movements. On the other hand, the TUPLEE ortho-
sis (Fleischer and Hommel, 2008) aims to assist the
wearer during various activities like standing, sitting
and climbing. The user’s intention is determined us-
ing Electromyogram (EMG) electrodes placed at the
thigh and the control torque behaves as an amplifier
of the knee torque. An elastic knee brace has been
designed in (Cherry et al., 2006) to add a parallel
stiffness to the knee allowing to compensate the in-
crease of the knee joint’s stiffness during running.
Impedance control has been addressed in (Aguirre-
Ollinger et al., 2007) to change the damping parame-
ter and in (Aguirre-Ollinger et al., 2010) to change the
inertia in order facilitate the flexion/extension move-
ments.
The present paper deals with the control of a lower
limb orthosis applied at the knee joint level. Knee
joint has a great importance in maintaining the hu-
man stability during the different daily living activ-
ities. Two case studies are proposed: the first one
deals with the passive rehabilitation process. A de-
sired knee joint angle is needed and is supposed de-
livered by the rehabilitation doctor. The wearer’s con-
tribution is considered active if it acts in the desired
position direction and is considered as external per-
turbation if it acts in the opposite direction. In this
case the priority is given to the desired task comple-
tion independently from the human contribution (Ri-
fai et al., 2011). The second case study concerns
the human based control and lies within the assistive
strategy. Muscular activities of the muscles spanning
the knee joint are measured and the resulting knee
joint torque is amplified through the use of the or-
205
Mohammed S., Rifai H., Hassani W. and Amirat Y..
Human-based Lower Limb Movement Assistance and Rehabilitation through an Actuated Orthosis.
DOI: 10.5220/0004664902050209
In Proceedings of the International Congress on Neurotechnology, Electronics and Informatics (RoboAssist-2013), pages 205-209
ISBN: 978-989-8565-80-8
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

thosis to ensure a desired movement initiated by the
wearer (Hassani et al., 2013). Asymptotic stability
of the knee joint orthosis is guaranteed in both cases.
Control law should take into consideration constraints
related to the safety of the mechanism since it is in di-
rect relation with the human body. In both case stud-
ies, the effectiveness of the proposed control strategy
is tested in real-time with a healthy subject.
The rest of the paper is organized as follows: Section
2 shows the system modeling and parameters identi-
fication. Section 3 presents the passive rehabilitation
control strategy while section 4 presents the subject
centered control strategy case study. Section 5 shows
the results in both cases and section 6 concludes the
paper.
2 SHANK-ORTHOSIS
MODELING AND
PARAMETERS
IDENTIFICATION
In the project EICOSI, the orthosis has a simple de-
sign, easy to don and doff, and match the lower limb
geometry which makes it very practical to use by el-
derly and dependent people. The orthosis is one struc-
ture having two segments related along a rotational
axis. The first segment embodies the thigh while
the second one embodies the shank and are fixed to
the wearer by means of straps (Figure 1). The or-
thosis and the human leg have, then, the same ro-
tational degree of freedom at the knee joint level.
The shank/orthosis parameters are identified using the
weighted least square optimization method. The mass
of the shank and the position of its center of grav-
ity are determined based on (Winter, 2009) given the
height and weight of the subject. The other param-
eters are identified using the passive pendulum test.
To identify the orthosis’ parameters, an excitation se-
quence describing the trajectory of the angle is prede-
Figure 1: EICOSI knee-joint orthosis.
fined as well as the angular velocity and acceleration
(Swevers et al., 1997). The torque developed by the
actuator during the tracking of the excitation trajec-
tory is computed using a current sensor.
3 PASSIVE REHABILITATION
CONTROL STRATEGY
The passive rehabilitation is performed after surgi-
cal operations of articular tissues as well as rehabil-
itation of spinal cord injured patients (Jansen et al.,
1996) (Rudhe et al., 2012) (Chang et al., 2013). In
this case study, the wearer is considered either com-
pletely passive, therefore, the wearer does not develop
any human control torque or paritally passive where
the wearer is developing an assistive but not suffi-
cient torque. If the wearer develops resistive torque,
this movementwill be considered as perturbing move-
ment and will be rejected by the controller. In this
case study, the control law is based on a gravity com-
pensation and ensures the tracking of a desired trajec-
tory. The proposed strategy ensures the asymptotic
stability of the orthosis/wearer for flexion-extension
movements. The stance phase of locomotion has not
been taken into account. The control is guaranteed
to be bounded in order to take into account limited
power support. Also the saturation of the actuator is
used explicitly in the control law in order to prevent
problems related to nonlinearities of the shank-foot
orthosis. Quick friction variations induced by unpre-
dictable movementsmay cause unacceptable behavior
of the orthosis, also high value of the control torque
necessitates high power to ensure it, which cannot
be achieved in wearable robots because it affects the
safety of the wearer. The saturation based control law
can take into account these limitations. Consequently,
the actuator magnitude limitation is taken into con-
sideration in the design of the control torque in or-
der to avoid irreversible damages. The proposed con-
trol law is robust with respect to external perturba-
tions. Indeed, a misstep can be caused by a wrong
movement at the knee level, it can cause instability
or even falling down. Therefore, one main property
of the control law is to regain the intended position
whenever an unpredictable flexion occurs. Experi-
ments that consist on blocking the shank for a short
period by an external operator have been conducted
and shown satisfactory results in terms of quickly re-
gaining the desired position. The magnitude of the re-
sulted perturbation remains within the saturation lim-
its imposed by the controller.
NEUROTECHNIX2013-InternationalCongressonNeurotechnology,ElectronicsandInformatics
206
4 SUBJECT CENTERED
CONTROL STRATEGY
An ”Assistance as Needed” approach is developed to
allow a flexible and smooth orthosis/wearer interac-
tion. In this case study, a realistic bio-inspired muscu-
loskeletal model is used to control the orthosis move-
ments (Hassani et al., 2013) . Parameters such as mus-
cle length variations, activation and contraction dy-
namics and moment arms are taken into account. This
will allow a better estimation of the wearer’s inten-
tion. The identification of the above parameters was
made through an unconstrained optimization problem
formulation. Secondly, a control law strategy is de-
veloped to guarantee asymptotic stability of the knee
joint orthosis as well as flexible interaction between
human and exoskeleton. This control law has also
shown its robustness with respect to external distur-
bances. In this case study, the wearer is supposed to
developing a torque to move his/her leg. The orthosis
is assisting the wearer by delivering the complemen-
tary torque, necessary to achieve a given desired task.
The subject’s intention is taken into account through
the human developed torque while the controller’s pa-
rameters are adapted automatically with respect to
the wearer’s changing human contribution during the
completion of the task. This approach can be used
particularly during a rehabilitation process as the con-
tribution of the orthosis torque decreases with the im-
provement in the performance of the wearer. Indeed,
the controller continuously attempt to reduce its as-
sistance ratio when the wearer develops an effort to
accomplish a given task. On the other side, when the
user moves largely away of the desired joint trajec-
tory, the controller develops a counter-torque to bring
the wearer limb back to the desired trajectory or to its
vicinity.
5 RESULTS
The control law is tested in real-time using the
EICOSI orthosis of the Laboratory of Images, Sig-
nals and Intelligent Systems (LISSI) of the University
of Paris-Est Crteil (UPEC). The mechanical structure
of the orthosis consists of two segments attached to
the thigh and shank respectively by means of straps,
with a rotation axis at the knee level. The orthosis is
actuated using a brushless DC motor (BLDC) chosen
because it delivers a relatively high torque and runs
smoothly at low speeds. The maximal torque that can
be delivered by the actuator is equal to 25 N.m. The
orthosis is also equipped with an incremental encoder
that delivers the angle of the shank segment relative to
the thigh one. The control torque is computed using
a controller board (dSPACE-DS1103) equipped with
an IBM processor running at 400Mhz. The controller
takes the measurement of the angle delivered by the
EICOSI’s sensor and the angular velocity obtained by
a simple derivation as well as the desired angle and
velocity. The controller board delivers the pulse width
modulation (PWM) level to control the actuator’s ve-
locity. The control loop runs at 1 kHz, fixed due to
current and position sensors constraints. The exper-
iments are conducted on a healthy subject having 35
years old, weighing 94Kg and measuring 1.82m.
0 5 10 15 20 25 30 35
−1.5
−1
−0.5
0
0 5 10 15 20 25 30 35
−2
0
2
0 5 10 15 20 25 30 35
−10
0
10
20
30
0 5 10 15 20 25 30 35
−100
0
100
0 5 10 15 20 25 30 35
−100
0
100
θ(rad)
˙
θ(rad/s)
τ(N · m)RF (µV)BF (µV)
time (s)
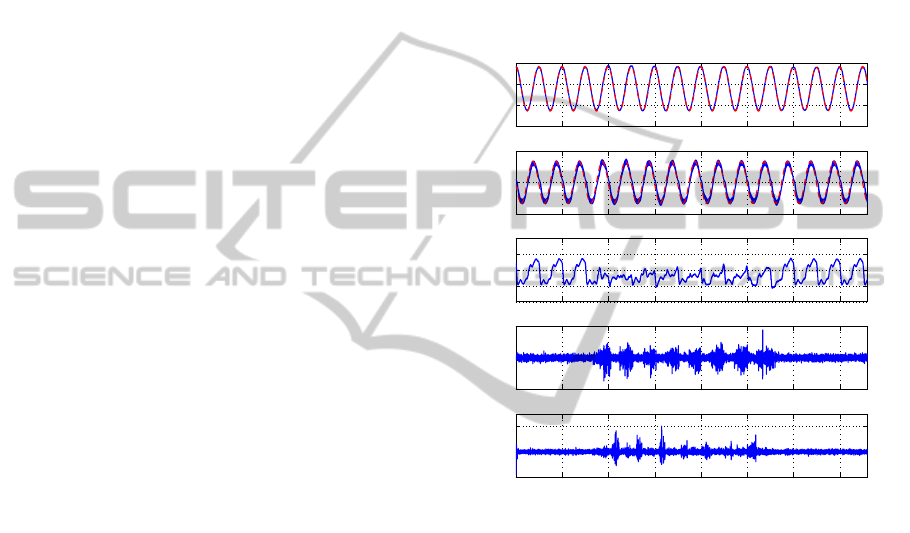
Figure 2: Sine reference trajectory with assisting human
effort in the time interval [8.5, 28.5] s: The first two plots
represent a good tracking between the current and desired
knee-joint angles and angular velocities, the current values
are plotted with continuous blue line and the desired ones
with red dashed lines. The control torque τ has lower val-
ues during the assistance phase detected by the RF and BF
muscles activities.
In figure 2, the subject is able to move his leg but
does not have sufficient power to achievea movement.
In other words, the subject deliversa part of the torque
necessary for the movement and the exoskeleton is
supposed to help him ensuring the desired movement
by delivering the complementary torque. This strat-
egy is known as the assistance-as-needed. The subject
is delivering an effort in the time interval [8.5, 28.5]s
that goes in the same direction as the desired trajec-
tory. It can be seen that the Rectus Femoris (RF) mus-
cle is active during the extension (sine with positive
slope) while the Biceps Femoris (BF) during the flex-
ion (sine with negative slope) in the last two plots of
Figure 2. However, this effort is not sufficient to en-
Human-basedLowerLimbMovementAssistanceandRehabilitationthroughanActuatedOrthosis
207
sure the tracking of the desired trajectory. The control
is therefore only assisting the subject during this inter-
val. One can notice that the magnitude of the control
torque is lower than that delivered outside the assis-
tance phase, i.e. in the time intervals [0,8.5[s and
]28.5, 38] s. The control law ensures a good adap-
tation and trajectory tracking (first two plots of Fig-
ure 2) during the assistance and non-assistance phases
which guarantees the safety of the wearer.
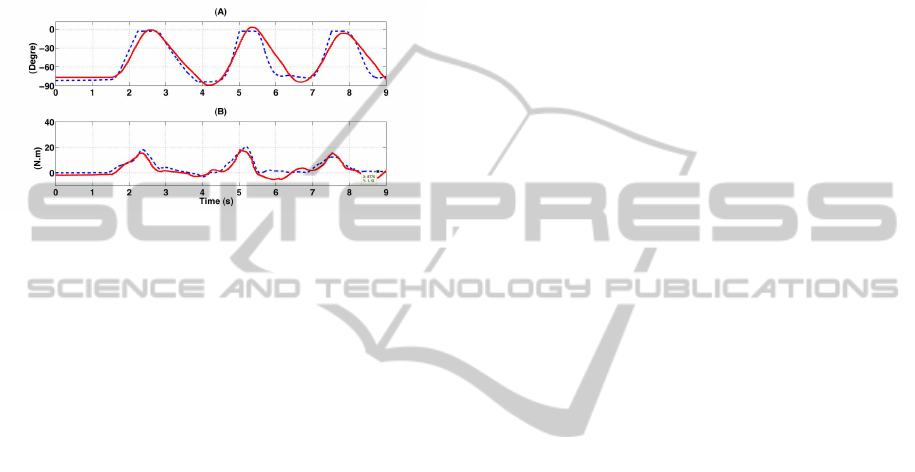
Figure 3: Assistance results (A): Desired position (dashed
blue) and current position (red), (B): Human torque (dashed
blue) and exoskeleton torque (red).
In figure 3, the control is based on the wearer’s
intention. The wearer’s torque is estimated using the
lower limb anatomical model based on the use of the
modified hill-type muscle model. The raw EMG sig-
nals are measured from the quadriceps and hamstrings
muscles. During this experiment, the wearer is asked
to produce free flexion / extension movements of the
knee joint. The advantage of the proposed approach
consists in its nature which is subject centered where
no predefined position trajectory is imposed to the
wearer.
6 CONCLUSIONS
This paper treated the control of a knee-joint ortho-
sis. A model, of the shank and orthosis, is proposed
and its parameters has been identified. Two control
strategies were proposed, the first one deals with the
passive rehabilitation process. A desired knee joint
angle is needed and is supposed delivered by the re-
habilitation doctor. In this case the priority is given
to the desired task completion independently from
the human contribution. The second case study con-
cerns the human based control and lies within the as-
sistive strategy. Muscular activities of the muscles
spanning the knee joint are measured and the result-
ing knee joint torque is amplified through the use of
the orthosis to ensure a desired movement initiated
by the wearer. Experimental validations of the pro-
posed strategies were conducted in real-time with a
young healthy subject using the EICOSI orthosis of
the LISSI Lab.
ACKNOWLEDGEMENTS
The EICOSI project is sponsored by the regional
council of Ile-De-France.
REFERENCES
Aguirre-Ollinger, G., Colgate, J., Peshkin, M., and
Groswami, A. (2007). A 1-DOF assistive exoskeleton
with virtual negative damping: Effects on the kine-
matic response of the lower limbs. In Proceedings
of International Conference on Intelligent Robots and
Systems, pages 1938–1944, San Diego, CA, USA.
Aguirre-Ollinger, G., Colgate, J., Peshkin, M., and
Groswami, A. (2010). Design of an active 1-DOF
lower-limb exoskeleton with inertia compensation. In-
ternational Journal of Robotics Research, 30(4):486–
499.
Bonutti, P., Marulanda, G., McGrath, M., Mont, M., and
Zywiel, M. (2010). Static progressive stretch im-
proves range of motion in arthrofibrosis following toal
knee arthroplasty. Knee surgery, sports traumatology,
arthroscopy, 18(2):194–199.
Chang, Y., Liang, J., Hsu, M., Lien, H. Fang, C., and
Lin, C. (2013). Effects of continuous passive mo-
tion on reversing the adapted spinal circuit in humans
with chronic spinal cord injury. Archives of Physical
Medicine and Rehabilitation.
Cherry, M.-S., Choi, D.-J., Deng, K.-J., Kota, S., and Fer-
ris, D.-P. (2006). Design and fabrication of an elastic
knee orthosis: Preliminary results. In Int. design engi-
neering technical conf. & Conputers and information
in engineering conf., pages 565–573, USA.
Fleischer, C. and Hommel, G. (2008). A human-
exeskeleton interface utilizing electromyography.
IEEE Transactions on Robotics, 24(4):872–882.
Hassani, W., Mohammed, S., and Amirat, Y. (2013). Real-
time emg driven lower limb actuated orthosis for as-
sistance as needed movement strategy. In Robotics:
Science and Systems Conference.
Jansen, C., Windau, J., Bonutti, P., and Brillhart, M. (1996).
Treatment of a knee contracture using a knee orthosis
incorporating stress-relaxation techniques. Journal of
Physical Therapy Association, 76(2):182–186.
Mohammed, S., Amirat, Y., and Rifai, H. (2012). Lower-
limb movement assistance through wearable robots:
state of the art and challenges. Advanced Robotics,
26(1-2):1–22.
Rifai, H., Hassani, W., Mohammed, S., and Amirat, Y.
(2011). Bounded control of an actuated lower limb or-
thosis. In Decision and Control and European Control
Conference (CDC-ECC), 2011 50th IEEE Conference
on, pages 873–878.
NEUROTECHNIX2013-InternationalCongressonNeurotechnology,ElectronicsandInformatics
208

Rudhe, C., Albisser, U., Starkey, M. Curt, A., and Bol-
liger, M. (2012). Reliability of movement workspace
measurements in a passive arm orthosis used in spinal
cord injury rehabilitation. Journal of Neuroengineer-
ing and Rehabilitation, 9(37).
Schmitt, C., Metrailler, P., Al-Khodairy, A., Brodard, R.,
Fournier, J., Bouri, M., and Clavel, R. (2004). A
study of a knee extension controlled by a closed loop
functional electrical stimulation. In 9
th
annual confer-
ence of the International FES society, pages 135–137,
Bournemouth.
Swevers, J., Ganseman, C., Tukel, D. B., De Schutter, J.,
and Van Brussel, H. (1997). Optimal robot excitation
and identification. Robotics and Automation, IEEE
Transactions on, 13(5):730–740.
Tsukahara, A., Kawanishi, R., Hasegawa, Y., and Sankai, Y.
(2010). Sit-to-stand and stand-to-sit transfer support
for complete paraplegic patients with robot suit HAL.
Journal of Advanced Robotics, 24(1):1615–1638.
Winter, D. A. (2009). Biomechanics and motor control of
human movement. Wiley.
Human-basedLowerLimbMovementAssistanceandRehabilitationthroughanActuatedOrthosis
209
