ECoG Real Time Signal Processing for Clinical Self paced BCI
Application
Nana Arizumi, Guillaume Charvet, Andrey Eliseyev, Jérémy Pradal, Serpil Cokgungor,
Nicolas Tarrin, Corinne Mestais, Tetiana Aksenova and Alim-Louis Benabid
CEA, LETI, CLINATEC
®
, MINATEC Campus, 17 Rue Martyrs, 38054, Grenoble Cédex, France
1 OBJECTIVES
The overall goal of the Brain Computer Interface
(BCI) project led at CEA/LETI/CLINATEC
®
is to
improve the quality of life of quadriplegic subjects.
BCI will allow them to control effectors such as an
exoskeleton, through recording and processing of the
electrical activity of their brain. To do this, a
wireless 64-channel ElectroCorticoGram (ECoG)
recording device WIMAGINE
®
(Wireless
Implantable Multi-channel Acquisition system for
Generic Interface with NEurons) has been designed
for long-term human implantation to interface an
electrode array to an external computer (Charvet et
al 2013). To decode the ECoG data, high resolution
algorithm has been constructed at CLINATEC
®
(Eliseyev et al., 2011); (Eliseyev and Aksenova
2013). Once the data are treated, they are used to
control the external effectors.
To reach the overall goal, it is crucial to
construct a whole software system working in real
time. In order to prepare the BCI software system
for the clinical trials, we demonstrated online real
time Electrocorticogram (ECoG) signal processing
using Monkey ECoG recordings corresponding to an
arm movement (Shimoda et al., 2012). The
algorithm of N-way Partial Least Square (NPLS)
regression family (Eliseyev and Aksenova, 2013) is
applied to extract linear model from the recordings.
The model is used to control the robotic arm JACO
(KINOVA) as a demonstrator.
2 METHODS
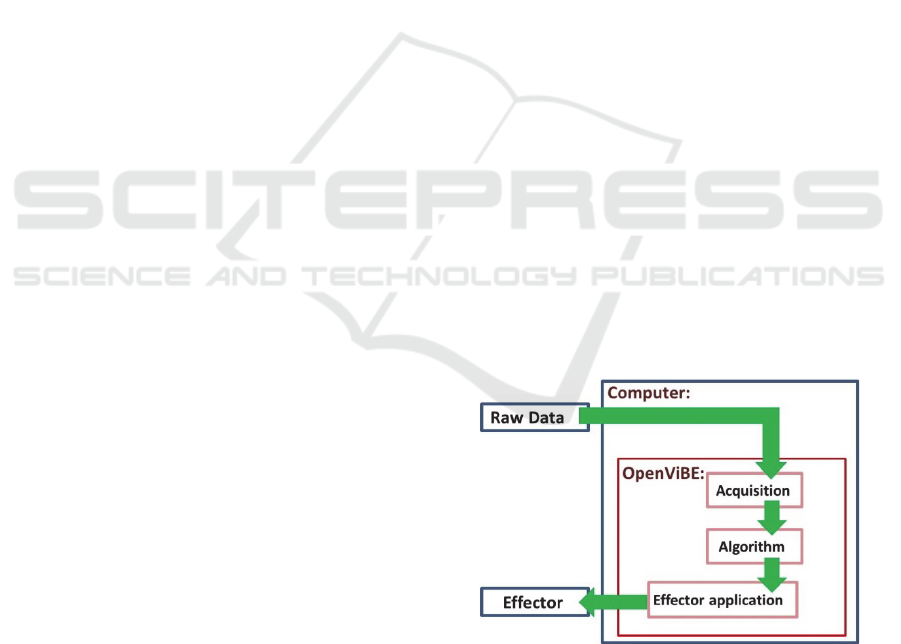
Figure 1 shows the schematic data flow for our BCI
system. The raw data should contain high temporal
resolution which does not limit to specific data
acquisition, e.g. EEG, MEG and ECoG.
Accumulation of data from several channels is
represented in Acquisition box in Figure 1. After the
data are collected in some buffer size, they are
mapped by the continuous wavelet transform (CTW)
to the temporal-frequency-spatial space (Acar et al
2008). Then they are sent to the linear prediction
model. To create the model, the algorithm of PLS
family (Eliseyev and Aksenova, 2013) is applied.
PLS is a statistical method for data analyses
particularly suited for high dimensional variables
(Geladi and Kowalski, 1986). PLS algorithms
provide stable linear models, which can then be used
to decode neuronal signal into commands for
external devices. Both CWT and prediction are
represented in Algorithm box in Figure 1. The data
transmission is represented in Effector application
box in Figure 1.
Figure 1: Flow of data decoding.
2.1 Specific Application
To test the system, publically available raw data are
considered (Shimoda et al., 2012), which contains
nine dimensional arm trajectory (shoulder, elbow
and wrist of x- y- z- coordinated captured by
VICON system) of Japanese macaque as well as
epidural ECoG signals of monkey’s brain (64
electrodes, sampling rate 1 kHz).
For decoding, block-wise Recursive N-way PLS
regressing is used (Eliseyev and Aksenova, 2013),
which can show correlation of 0.62, 0.80 and 0.85 of
shoulder, 0.54, 0.84 and 0.83 of elbow and 0.63,
0.85 and 0.82 of wrist for x- y- z- coordinates
Arizumi N., Charvet G., Eliseyev A., Pradal J., Cokgungor S., Tarrin N., Mestais C., Aksenova T. and Benabid A..
ECoG Real Time Signal Processing for Clinical Self paced BCI Application.
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

respectively. To form training tensor, 64 electrodes
ECoG signal and 1000ms window of analysis are
considered. The CWT with 84 frequencies between
0.6 and 300 Hz are performed with additional 100ms
tails using FFTW software (Frigo and Johnson,
2005). Then the signal was decimated in 100ms with
200ms sliding window. Using this training tensor,
predictive model is constructed. After the training
phase, the same features are considered for online
prediction. All of the computations are integrated
with OpenViBE (http://openvibe.inria.fr/) and
finally connected with the JACO robotic arm as
shown in Figure 2.
Figure 2: Comparison of predicted and actual movement.
3 RESULTS
To achieve real time, whole computation has to be
completed within the buffer size. With the specific
application from previous section, the temporal-
frequency-spatial dimension is 537600 and
predictive space has 9 degrees of freedom, namely
shoulder, elbow and wrist of x- y- z- coordinates.
With buffer size 100ms, the algorithm itself takes
83.81ms in average and simulating real time using
OpenViBE reach real time for more than 10 minutes.
4 DISCUSSION
The system can be applied to different algorithms
and data sets. The different model from PLS method
(Chao et al., 2010) is also tested. From the specific
applications, it is feasible to conclude that the model
using less than 64 channels, 84 frequencies and
1000ms window has decision rate at least 10Hz.
This is directly related to the CLINATEC BCI
project with ECoG signals of 64 channels using
linear predictive models.
ACKNOWLEDGEMENTS
The authors wish to thank the technical staff of
CLINATEC for their profound involvement in the
success of the project. The project received financial
support through grants from the French National
Research Agency (ANR-Carnot Institute), Fondation
Motrice, Fondation Nanosciences, Fondation de
l’Avenir, and Fondation Philanthropique Edmond J.
Safra.
REFERENCES
Acar, E., Bingol, C., A., Bingol., H., Bro, R., Yener, B.,
2007. Multiway analysis of epilepsy tensors.
Bioinform. 23 i10-8.
Chao, Z., C., Nagasaki, Y., Fujii, N., 2010. Long-term
asynchronous decoding of arm motion using
eletrocorticographic signals in monkeys. Front.
Neuroeng., 33.
Charvet, G., Sauter-Starace, F., Foerster, M., Ratel, D.,
Chabrol, C., Porcherot, J., Robinet, S., Reverdy, J.,
D’Errico, R., Mestais, C., Benabid, A-L., 2013.
WIMAGINE®: 64-channel ECoG recording implant
for human applications. In EMBC’13, 35
th
annual
international conference of the IEEE Engineering in
Medicine and Biology Society, July 3-7, Osaka, Japan.
Eliseyev, A., Aksenova, T., 2013. Recursive N-Way
Partial Least Squares for Brain-Computer Interface.
PloS one, In press.
Eliseyev, A., Moro, C., Costecalde, T., Torres, N., Gharbi,
S., Mestais, C., Benabid, AL., Aksenova, T., 2011.
Iterative N-way partial least squares for a binary self-
paced brain-computer interface in freely moving
animals. J Neural Eng. 2011 Aug;8(4):046012.
Frigo, M., Johnson, G., S., 2005. The design and
implementation of FFTW3. Proc. IEEE 93 (2), 216–
231.
Geladi, P., Kowalski, B., R., 1986. Partial least-squares
regression: a tutorial. Anal. Chim. Acta 185 1-17.
Shimoda, K., Nagasaka, Y., Chao, Z., C., Fujii, N., 2012.
Decoding continuous three dimensional hand
trajectories from epidural electrocorticographic signals
in Japanese macaques. J. Neural Eng., 9:036015.
