
Shape Transformation of Multidimensional Density Functions
using Distribution Interpolation of the Radon Transforms
M
´
arton J
´
ozsef T
´
oth and Bal
´
azs Cs
´
ebfavi
Department of Control Engineering and Information Technology,
Budapest University of Technology and Economics,
Magyar tud
´
osok krt. 2, Budapest, Hungary
Keywords:
Shape-based Interpolation, Volume Morphing, Distribution Interpolation, Radon Transform.
Abstract:
In this paper, we extend 1D distribution interpolation to 2D and 3D by using the Radon transform. Our
algorithm is fundamentally different from previous shape transformation techniques, since it considers the
objects to be interpolated as density distributions rather than level sets of Implicit Functions (IF). First, we
perform distribution interpolation on the precalculated Radon transforms of two different density functions,
and then an intermediate density function is obtained by an inverse Radon transform. This approach guarantees
a smooth transition along all the directions the Radon transform is calculated for. Unlike the IF methods,
our technique is able to interpolate between features that do not even overlap and it does not require a one
dimension higher object representation. We will demonstrate that these advantageous properties can be well
exploited for 3D modeling and metamorphosis.
1 INTRODUCTION
Shape-based interpolation is mainly used for (1) mod-
eling or reconstruction of 3D objects from 2D cross
sections (Raya and Udupa, 1990; Herman et al., 1992;
Grevera and Udupa, 1996; Treece et al., 2000; Turk
and O’brien, 2002) and (2) morphing (Lerios et al.,
1995; Cohen-Or et al., 1998; Turk and O’Brien,
1999). The major application fields of these tech-
niques are Computer Aided Design (CAD), movie in-
dustry, and medical image processing and visualiza-
tion. In CAD systems, 3D geometrical models can be
built from contours defined in cross-sectional slices
(Treece et al., 2000; Liu et al., 2008). Surfaces that
fit onto the contours are obtained by using a contour-
interpolation method between the subsequent slices.
In the movie industry, shape transformation is used
for making special effects, such as morphing charac-
ters. In 3D medical imaging, it is usual that the reso-
lution of a volumetric data set is lower along the z axis
than along the x and y axes. Therefore, a shape-based
interpolation technique is applied to produce interme-
diate slices to obtain an isotropic volume represen-
tation (Raya and Udupa, 1990; Herman et al., 1992;
Grevera and Udupa, 1996; Treece et al., 2000). The
most popular way of automatic shape transformation
is based on an Implicit Function (IF) representation
of 2D or 3D shapes (Borgefors, 1986; Jones et al.,
2006). An intermediate shape is simply produced as a
level set of an IF that is calculated by interpolating be-
tween the IFs belonging to the initial and final shapes
(Raya and Udupa, 1990; Herman et al., 1992). This
approach is easy to implement and robust in a sense
that topologically different shapes can be interpolated
without searching for pairs of corresponding points.
Nevertheless, in this paper, we show that the previous
IF methods are able to make a smooth transition be-
tween two features only if they are overlapping, oth-
erwise the features get disconnected. Furthermore,
shape-based interpolation of gray-scale images (in
other words, density functions) requires a one dimen-
sion higher representation than a shape-based inter-
polation of object boundaries (Grevera and Udupa,
1996). To remedy these problems, we propose a fun-
damentally different approach for shape-based inter-
polation. Our major goal is to guarantee a continu-
ous transition between the lower-dimensional projec-
tions of density functions to be interpolated. There-
fore, we precalculate the Radon transforms (Deans,
1983) of the density functions, which represent the
lower-dimensional projections from different angles,
and apply a distribution interpolation (Read, 1999)
between the corresponding projections. The result is
then transformed back by the classical Filtered Back-
5
Tóth M. and Csébfavi B..
Shape Transformation of Multidimensional Density Functions using Distribution Interpolation of the Radon Transforms.
DOI: 10.5220/0004640800050012
In Proceedings of the 9th International Conference on Computer Graphics Theory and Applications (GRAPP-2014), pages 5-12
ISBN: 978-989-758-002-4
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

Projection (FBP) algorithm, which implements the in-
verse Radon transform. We will demonstrate that the
modeling potential of this algorithm is much higher
than that of the IF methods, as it is able to connect
features that do not overlap. Moreover, our method is
efficient to use even for interpolating between 3D den-
sity functions, as the alternative representation pro-
duced by the Radon transform remains 3D, while
the classical shape-based interpolation of gray-scale
volumes would require 4D IFs to calculate (Grevera
and Udupa, 1996). Distribution interpolation and the
Radon transform are well-known tools that have been
used separately in different application fields, but to
the best of our knowledge, their combination and its
application for shape-based interpolation has not been
studied so far.
2 RELATED WORK
In computer graphics, shape-based interpolation is
usually applied for interpolating between the bound-
ary contours of 2D shapes or morphing between the
boundary surfaces of 3D objects. However, an au-
tomatic morphing between translucent objects (Kniss
et al., 2002), which are defined by volumetric density
functions rather than explicit geometrical models is
still a challenging task. It depends on subjective pref-
erences whether a morphing algorithm should be fully
automatic or user-controlled. We think that the advan-
tages of these approaches are complementary and it
depends on the given application which one to prefer.
As we focus on automatic morphing, warping tech-
niques that require user intervention (Beier and Neely,
1992; Lerios et al., 1995; Cohen-Or et al., 1998; Fang
et al., 2000) are out of the scope of this paper. Auto-
matic morphing is favorable, for instance, if a shape-
based interpolation is required between all pairs of
consecutive slices in a huge volumetric data set, or a
morphing needs to be performed between 3D objects
that are completely different geometrically and corre-
sponding features can hardly be specified. The ma-
jor expectation from an automatic morphing method
is to provide intermediate objects that show features
of both objects which we interpolate between, and to
guarantee a smooth and gradual transition between
the features.
2.1 Shape-Based Interpolation of
Boundary Contours
Early shape-based interpolation techniques were pro-
posed for medical imaging applications, where the
goal was to reconstruct 3D shapes of different or-
gans from 2D slices of CT or MRI scans (Raya and
Udupa, 1990; Herman et al., 1992; Grevera and
Udupa, 1996). For example, this is a typical appli-
cation field, where an automatic processing is clearly
an advantage, since a huge amount of voxel data is
required to be efficiently processed preferably with-
out any user interaction. As in a usual volumetric
data set the inter-slice distance is higher than the dis-
tance between the pixels of the slices, additional in-
termediate slices need to be interpolated to produce
an isotropic volume. The brute-force method is to
directly interpolate between the original slices, and
to apply the well-known Marching Cubes algorithm
(Lorensen and Cline, 1987) to extract a boundary sur-
face. However, this approach often results in severe
staircase artifacts. To reproduce smooth boundary
surfaces, shape-based interpolation techniques first
detect boundary contours on the slices and then apply
a more sophisticated contour-interpolation method.
For contour interpolation, a variety of methods have
been published that build a triangular mesh which
connects the two consecutive contours (Bajaj et al.,
1996; Cheng and Dey, 1999; Treece et al., 2000; Liu
et al., 2008). Generally, this is a difficult task, since
the problem of self-intersection and topologically dif-
ferent contours need to be carefully handled. Un-
like the direct contour-interpolation techniques, the IF
methods can easily avoid these problems. The basic
idea is to interpolate between the IFs that represent the
consecutive contours, and extract intermediate con-
tours from interpolated IFs. As a shape-based inter-
polation method is required to handle the distance
information somehow, it is a natural choice to use
a Signed Distance Map (SDM) as an IF (Borgefors,
1986; Jones et al., 2006). The pixels of a 2D SDM
represent the distance to the nearest contour point,
but inside the contour the sign is positive, while out-
side the contour it is negative. An intermediate con-
tour is obtained by extracting the zero-crossing level
set of the interpolated SDMs (Raya and Udupa, 1990;
Herman et al., 1992; Grevera and Udupa, 1996). The
SDM representation is efficient to calculate using the
chamfering method (Akmal Butt and Maragos, 1998).
2.2 Shape-Based Interpolation of
Boundary Surfaces
Shape-based contour interpolation is straightforward
to extend to surface interpolation (Raya and Udupa,
1990). A boundary surface of an object can be rep-
resented by a 3D SDM, where the voxels store the
distance to the closest surface point. Similarly to
the 2D SDMs, the sign is positive inside the object
GRAPP2014-InternationalConferenceonComputerGraphicsTheoryandApplications
6

and negative outside the object. The interpolation
of the 3D SDMs and the extraction of the interme-
diate boundary surface are done analogously to the
2D case. Although this method can produce tran-
sitions between topologically different objects, the
transitions are often not smooth enough due to the
discontinuous curvature of the SDMs. In order to
achieve smoother transitions, variational interpolation
was proposed (Turk and O’Brien, 1999), which con-
structs IFs of minimal aggregate curvature. The IFs
are searched for as a linear combination of Radial Ba-
sis Functions (RBF) (Buhmann, 2009) and the coeffi-
cients are determined such that the curvature is min-
imized. This requires the solution of a large linear
equation system, which is time-consuming for com-
plex shapes. Furthermore, in case of such constrained
optimization problems, the coefficient matrix is prone
to be ill-conditioned (Turk and O’brien, 2002); thus,
its inversion by the proposed LU decomposition could
easily become instable if the number of the unknown
variables drastically increase. This is probably the
reason why the variational interpolation (Turk and
O’Brien, 1999) has not been extended to gray-scale
images or volumes.
2.3 Extension to Gray-Scale Images and
Volumes
The shape-based interpolation of gray-scale images
(Grevera and Udupa, 1996) is computationally much
more expensive than the shape-based interpolation of
contours as it requires 3D IFs to interpolate rather
than only 2D IFs. Each image is considered to be
a height field, which can alternatively be represented
by a 3D SDM. The intermediate images are obtained
as height fields extracted from the interpolated 3D
SDMs. Thus, both the chamfering and the extrac-
tion of the zero-crossing level set require the process-
ing of 3D volumes for each pair of consecutive im-
ages. A shape-based interpolation of gray-scale vol-
umes (Grevera and Udupa, 1996) is even more expen-
sive. Here, the height fields are defined over the 3D
space; therefore, the corresponding SDMs are 4D data
sets. Consequently, 4D data processing is required to
obtain each single intermediate volume. The varia-
tional interpolation scheme (Turk and O’Brien, 1999)
has not been adapted to gray-scale images or volumes
yet, but using the same extension as for the SDMs,
it would also require a one dimension higher object
representation.
In contrast, our algorithm represents the gray-
scale images and volumes by their Radon transforms,
which are of the same dimensionality as the original
data. Additionally, we perform efficient processing on
the Radon transforms; thus, all the computation can
be completed in a reasonable time. Moreover, as the
smoothness of the transition is guaranteed by the dis-
tribution interpolation on the projections the Radon
transform is evaluated for, a computationally expen-
sive constrained optimization (Cs
´
ebfalvi et al., 2002;
Neumann et al., 2002) is not necessary.
3 MULTIDIMENSIONAL
DISTRIBUTION
INTERPOLATION
In this section, we describe how to extend 1D distribu-
tion interpolation (Read, 1999) to higher dimensions
by using the Radon transform.
3.1 Distribution Interpolation in 1D
Let us assume that we have two 1D density functions
f
0
(x) and f
1
(x), and we want to interpolate between
them. For example, Figure 1 shows two Gaussian
density functions that are scaled and centered differ-
ently. In f
0
(x) the same amount of material is con-
centrated on the left side as in f
1
(x) on the right side.
Therefore, it is a natural expectation that this mass is
gradually moved from left to right in the intermedi-
ate interpolated density functions. Note that a simple
linear interpolation along the y axis clearly does not
fulfill this requirement. A distribution interpolation
(Read, 1999), however, does exactly what is expected
from a shape-based interpolation technique. Instead
of directly interpolating the density functions along
the y axis, this method actually interpolates the Cumu-
lative Distribution Functions (CDF) along the x axis.
The CDFs for f
0
(x) and f
1
(x) are defined as follows:
F
0
(x) =
Z
x
−∞
f
0
(x
0
)dx
0
, (1)
F
1
(x) =
Z
x
−∞
f
1
(x
0
)dx
0
.
The first step of the distribution interpolation is to find
x
0
and x
1
such that F
0
(x
0
) = F
1
(x
1
) = y. The interpo-
lated CDF F
w
(x) takes the same value y at a linearly
interpolated position x = (1 − w)x
0
+ wx
1
. Positions
x
0
and x
1
are simply obtained by inverting the CDFs:
F
−1
w
(y) = x = (1 − w)x
0
+ wx
1
(2)
= (1 − w)F
−1
0
(y) + wF
−1
1
(y).
The interpolated CDF F
w
(x) is completely defined by
its inverse function F
−1
w
(y), and the corresponding in-
terpolated density function is obtained by a simple
derivation:
f
w
(x) =
dF
w
(x)
dx
. (3)
ShapeTransformationofMultidimensionalDensityFunctionsusingDistributionInterpolationoftheRadonTransforms
7
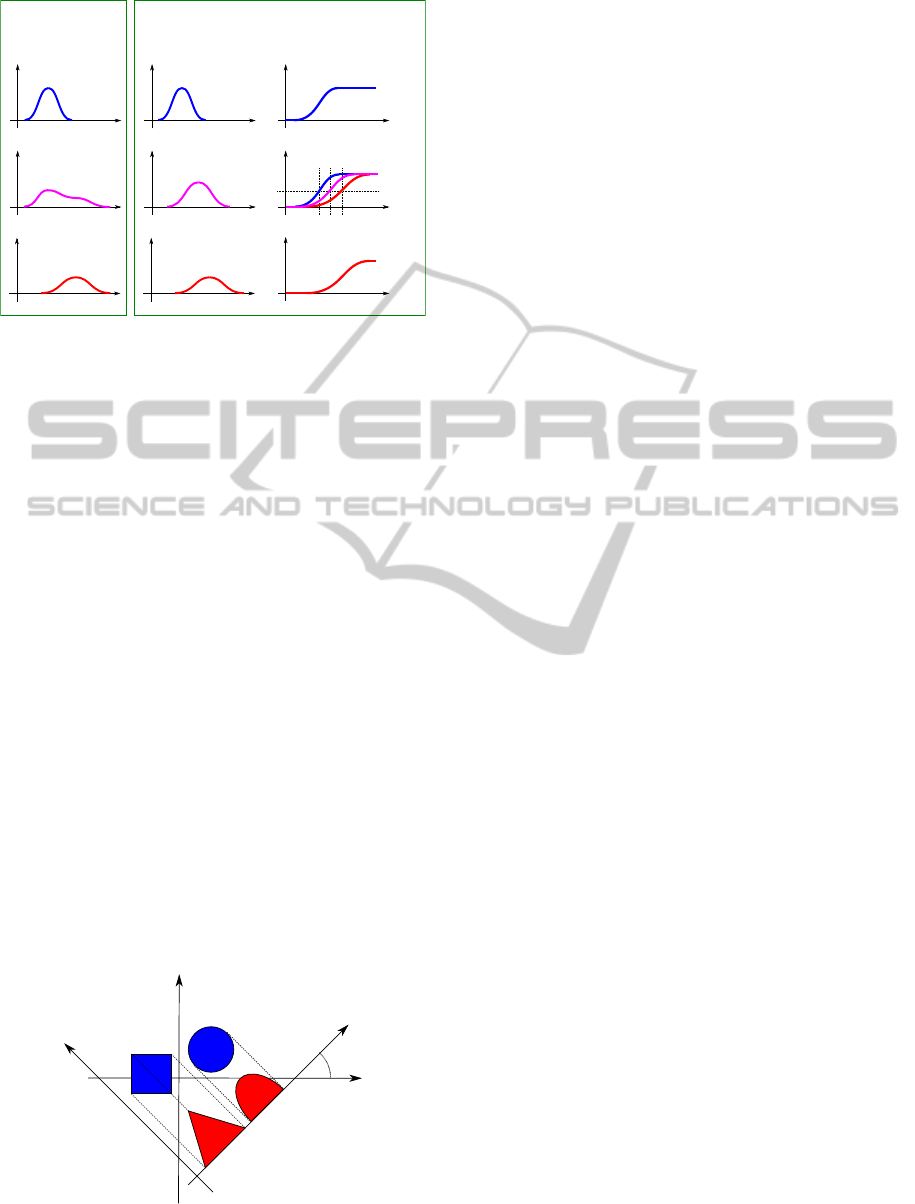
density function
cumulative distribution function
x x
f (x)
0
F (x)
0
x x
f (x) F (x)
x x
f (x)
1
F (x)
1
y
xx
10
1
x=(1-w)x + wx
0
distribution interpolation
w w
x
f (x)
0
x
f (x)
x
f (x)
1
w
linear interpolation
Figure 1: Distribution interpolation in 1D.
Figure 1 shows the interpolated density function for
w = 1/2. Distribution interpolation is usually applied
between probability density functions, so their inte-
grals are assumed to be equal to one. However, this
scheme can be easily adapted to mass distributions if
the distributions are normalized before the interpo-
lation and the interpolated distributions are rescaled
such that the a continuous transition of the total mass
is guaranteed.
3.2 The Radon Transform
Note that the 1D distribution interpolation cannot be
directly extended to higher dimensions. Since we pro-
pose an extension scheme that is based on the Radon
transform, here, we briefly overview its evaluation
and inversion. The Radon transform (Deans, 1983)
of a 2D density function f (x,y) is defined by a set of
1D projections p
θ
(t):
p
θ
(t) =
Z
∞
−∞
Z
∞
−∞
f (x,y)δ(x cos(θ)+y sin(θ)−t)dxdy,
(4)
where δ is the Dirac delta and θ is the projection an-
gle.
θ
p (t)
θ
t
s
x
y
f(x,y)
Figure 2: The Radon transform of a 2D density function is
defined as a set of 1D projections p
θ
(t).
The Radon transform is invertible, and its in-
verse can be evaluated by the classical Filtered Back-
Projection (FBP) algorithm (Kak and Slaney, 1988),
which consists of the following steps:
1. Fourier transform of the projections:
ˆp
θ
(ν) =
Z
∞
−∞
p
θ
(t)e
−i2πtν
dt. (5)
2. Filtering in the frequency domain, where the fre-
quency response of the filter is |ν|:
ˆq
θ
(ν) = ˆp
θ
(ν) · |ν|. (6)
3. Inverse Fourier transform of ˆq
θ
(ν):
q
θ
(t) =
Z
∞
−∞
ˆq
θ
(ν)e
i2πtν
dν. (7)
4. Back-projection of the filtered projections q
θ
(t):
f (x,y) =
Z
π
0
q
θ
(x cos(θ) + y sin(θ))dθ. (8)
3.3 2D Distribution Interpolation
Now assume that we want to interpolate between two
2D density functions f
0
(x,y) and f
1
(x,y). In order to
guarantee that the projections of the interpolated den-
sity functions make a smooth transition between the
projections of f
0
(x,y) and f
1
(x,y), we apply distribu-
tion interpolation on the 1D projections rather than a
direct interpolation between the 2D density functions.
The Radon transforms of f
0
(x,y) and f
1
(x,y) are de-
noted by p
0
θ
(t) and p
1
θ
(t), respectively. A distribution
interpolation makes sense only if the projection func-
tions are normalized before. Therefore, we need to
calculate the integrals of f
0
(x,y) and f
1
(x,y):
s
0
=
Z
∞
−∞
Z
∞
−∞
f
0
(x,y)dxdy, (9)
s
1
=
Z
∞
−∞
Z
∞
−∞
f
1
(x,y)dxdy.
By using distribution interpolation between the nor-
malized projections p
0
θ
(t)/s
0
and p
1
θ
(t)/s
1
, we obtain
normalized intermediate distributions p
w
θ
(t). To en-
sure a smooth transition of the total mass between
f
0
(x,y) and f
1
(x,y), the inverse Radon transform is
performed on rescaled projections p
w
θ
(t)((1 − w)s
0
+
ws
1
). The result of the inverse Radon transform is the
interpolated density function f
w
(x,y).
3.4 3D Distribution Interpolation
In order to interpolate between two 3D density func-
tions f
0
(x,y,z) and f
1
(x,y,z), 2D projections need to
be calculated:
GRAPP2014-InternationalConferenceonComputerGraphicsTheoryandApplications
8
p
0
θ
(t,z) = (10)
Z
∞
−∞
Z
∞
−∞
f
0
(x,y,z)δ(x cos(θ) + ysin(θ) − t)dxdy,
p
1
θ
(t,z) =
Z
∞
−∞
Z
∞
−∞
f
1
(x,y,z)δ(x cos(θ) + ysin(θ) − t)dxdy.
For a fixed angle θ, p
0
θ
(t,z) and p
1
θ
(t,z) are, in fact,
2D density functions. Therefore, a 2D distribution in-
terpolation can be applied between them as described
in Section 3.3. Afterwards, an intermediate 3D den-
sity function f
w
(x,y,z) is reconstructed from the inter-
polated 2D projections p
w
θ
(t,z) by using the standard
FBP algorithm, which is a de facto standard solution
for this classical tomography reconstruction problem.
In a practical implementation, a discrete approxima-
tion of the continuous integrals is applied. In order
to avoid a loss of information, it is required that the
total number of pixels in all discretized projections
is not smaller than the number of the voxels in the
discrete volumetric representations of the 3D density
functions.
4 APPLICATIONS
4.1 Shape-Based Interpolation of
Gray-Scale Images
Since our method is based on a Radon Transform
Interpolation, we refer to it as RTI. In contrast, the
method by Udupa and Grevera (Grevera and Udupa,
1996) is based on a Distance Transform Interpolation;
thus, we refer to it as DTI. We compare RTI to DTI
for the following reasons:
1. DTI is a de facto standard for an automatic shape-
based interpolation of gray-scale images.
2. DTI is a general solution and not designed for a
specific application field.
3. Although for contour interpolation the varia-
tional framework of Turk and O’Brien (Turk
and O’Brien, 1999) provides smoother transitions
than the interpolation of SDMs, its extension to
gray-scale images is not trivial, and to the best of
our knowledge, has not been published so far.
Note that, using DTI, the chamfering results in just
an approximation of the Euclidean distance trans-
form. Although the approximation can be improved
by larger chamfering windows, it significantly in-
creases the computational costs. Therefore, to make
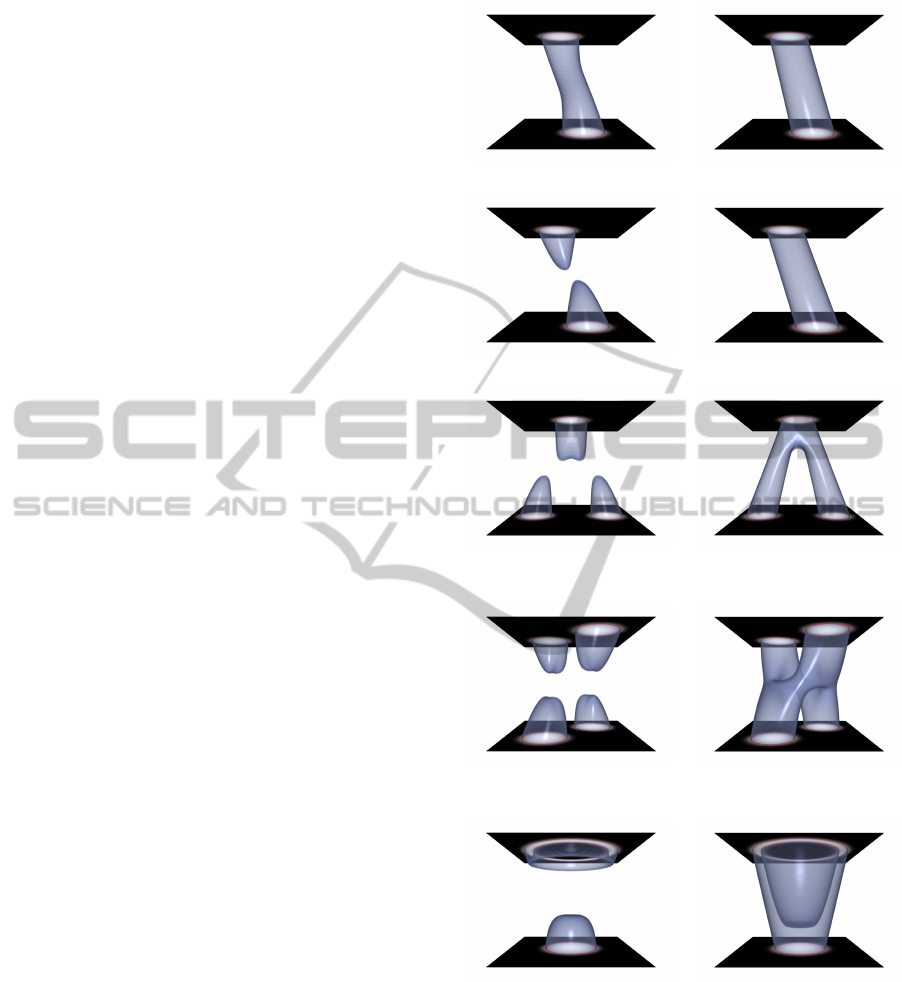
Interpolation between overlapping disc-shaped distributions.
Interpolation between non-overlapping disc-shaped distributions.
Transformation of one disc-shaped distribution
to two disc-shaped distributions.
Transformation of two disc-shaped distributions
to two other disc-shaped distributions.
Interpolation between disc-shaped and ring-shaped distributions.
Figure 3: Shape-based interpolation between different 2D
density distributions. Left: Interpolation of the distance
transforms. Right: Distribution interpolation of the Radon
transforms.
our comparison independent from the precision of the
distance transform, we evaluated the true Euclidean
distance maps for analytically defined height fields,
which are interpreted as gray-scale images.
ShapeTransformationofMultidimensionalDensityFunctionsusingDistributionInterpolationoftheRadonTransforms
9
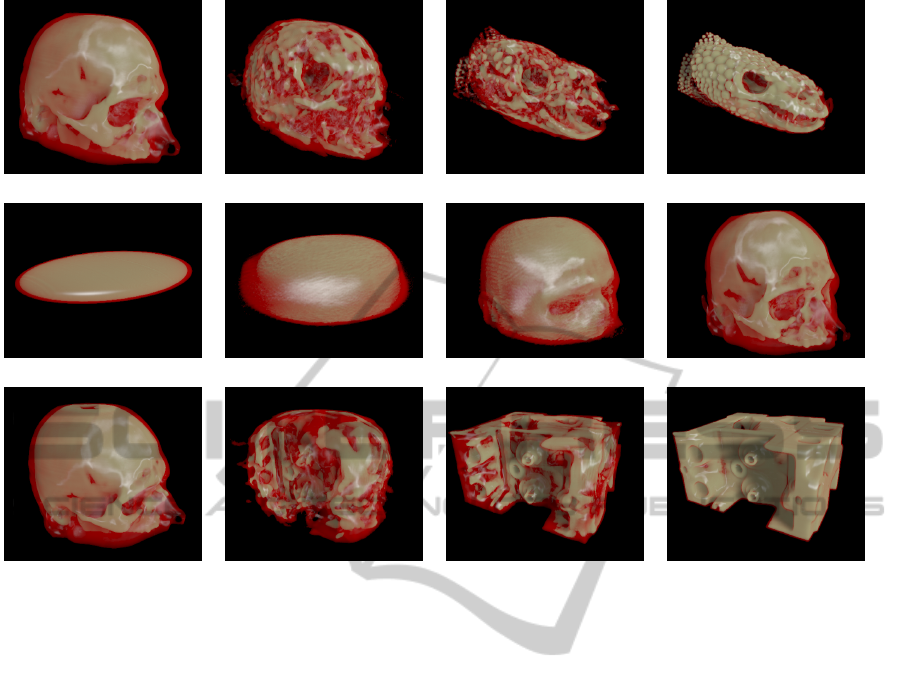
Figure 4: Automatic morphing between different gray-scale volumes using distribution interpolation on the Radon transforms.
Figure 3 shows several examples for shape-based
interpolations between different density distributions.
We generated 64 intermediate slices, and rendered the
resulting volume using direct volume rendering. The
first example is the easiest one, where we interpolate
between two overlapping disc-shaped distributions.
Although DTI is able to make a connection, it also
produces an unexpected curvature. In contrast, RTI
results in a perfect tubular connection. In the second
example, only the distance between the disc-shaped
distributions is increased such that they do not over-
lap anymore. Note that, in this case, DTI fails to make
a connection, while RTI still provides a perfect transi-
tion. The third and fourth examples well demonstrate
that, unlike DTI, RTI can appropriately handle bifur-
cations. In the last example, again two density distri-
butions are interpolated, which do not overlap. DTI
cannot make a connection for this case either, while
RTI is able to connect the ring-shaped and disc-shape
density distributions forming a glass shape. These ex-
amples clearly show that RTI can be a reasonable al-
ternative of DTI, for instance, in a modeling applica-
tion.
4.2 Metamorphosis of Gray-Scale
Volumes
In order to test our method also on gray-scale vol-
umes, we implemented the entire algorithm on the
GPU using CUDA. Note that, all the processing steps,
such as the Radon transform, its inversion by FBP,
and the distribution interpolation of the 1D projec-
tions are easy to map onto the parallel architecture
of the GPU. For the frequency-domain ramp filtering,
we used the CUDA FFT library. Figure 4 shows a
couple of examples for 3D morphing. For each pair
of volumes we generated 20 intermediate volumes of
resolution 256
3
, which took less than an hour on an
nVidia Tesla M2070 graphics card. In contrast, we
found it unfeasible to efficiently implement DTI for
gray-scale volumes on the GPU. Although there ex-
ist fast GPU implementations for calculating the dis-
tance transform in 2D or 3D (Schneider et al., 2009),
applying DTI, the shape-based interpolation of gray-
scale volumes would require 4D distance maps to cal-
culate. For example, using floating-point arithmetics,
for a volume of resolution 256
3
, the corresponding
4D distance map would take 256
4
× 4 = 16 Gbytes of
memory, which exceeds the capacity of recent graph-
ics cards. Furthermore, the calculation of such a huge
GRAPP2014-InternationalConferenceonComputerGraphicsTheoryandApplications
10

4D distance map would involve a significant com-
putational cost. Variational interpolation (Turk and
O’Brien, 1999) is also very difficult to extend to gray-
scale volumes. Using the extension scheme of Udupa
and Grevera (Grevera and Udupa, 1996), the gray-
scale volumes could be treated as height fields defined
over the 3D space. Since these height fields can be
represented by 4D IFs, the shape transformation be-
tween them would require a 4D RBF interpolation. To
avoid the loss of fine details, at least to each voxel a
4D RBF needs to be assigned. Thus, for a pair of vol-
umes with resolution 256
3
, the number of unknown
variables is 256
3
× 2. Consequently, the coefficient
matrix of the corresponding linear equation system
contains 256
6
× 4 elements, which makes the inver-
sion practically impossible. Overall, we think that
compared to the computational and storage costs of
the previous methods, our soution is simple and effi-
cient.
5 CONCLUSION
In this paper, we have introduced a novel algorithm
for shape-based interpolation of gray-scale images
and volumes. As far as we know, our technique is
the first to combine distribution interpolation and the
Radon transform. The major advantage of this com-
bination is that the Radon transform does not require
a one dimension higher representation than the orig-
inal images and volumes. This is not the case for
the previous IF methods, where the gray-scale images
and volumes can alternatively be represented by 3D
and 4D IFs, respectively. Moreover, we demonstrated
that the distribution interpolation of the Radon trans-
forms can make a smooth connection between non-
overlapping features that the IF methods are typically
not able to connect. Due to this advantageous proper-
ties, we think that our method represents a significant
contribution to the field of shape-based interpolation.
ACKNOWLEDGEMENTS
This work was supported by projects T
´
AMOP-
4.2.2.B-10/1–2010-0009 and OTKA K-101527. The
Heloderma data set is from the Digital Morphology
(http://www.digimorph.org) data archive. Special
thanks to Dr. Jessica A. Maisano for making this data
set available to us.
REFERENCES
Akmal Butt, M. and Maragos, P. (1998). Optimum design
of chamfer distance transforms. IEEE Transactions on
Image Processing, 7(10):1477–1484.
Bajaj, C. L., Coyle, E. J., and nan Lin, K. (1996). Arbi-
trary topology shape reconstruction from planar cross
sections. In Graphical Models and Image Processing,
pages 524–543.
Beier, T. and Neely, S. (1992). Feature-based image
metamorphosis. SIGGRAPH Computer Graphics,
26(2):35–42.
Borgefors, G. (1986). Distance transformations in digital
images. Computer Vision, Graphics, and Image Pro-
cessing, 34(3):344–371.
Buhmann, M. (2009). Radial Basis Functions: Theory and
Implementations. Cambridge Monographs on Applied
and Computational Mathematics. Cambridge Univer-
sity Press.
Cheng, S.-W. and Dey, T. K. (1999). Improved construc-
tions of delaunay based contour surfaces. In Proc.
ACM Sympos. Solid Modeling and Applications 99,
pages 322–323.
Cohen-Or, D., Solomovic, A., and Levin, D. (1998). Three-
dimensional distance field metamorphosis. ACM
Transactions on Graphics, 17(2):116–141.
Cs
´
ebfalvi, B., Neumann, L., Kanitsar, A., and Gr
¨
oller, E.
(2002). Smooth shape-based interpolation using the
conjugate gradient method. In Proceedings of Vision,
Modeling, and Visualization, pages 123–130.
Deans, S. R. (1983). The Radon Transform and Some of Its
Applications. Krieger Publishing.
Fang, S., Srinivasan, R., Raghavan, R., and Richtsmeier,
J. T. (2000). Volume morphing and rendering - an
integrated approach. Computer Aided Geometric De-
sign, 17(1):59–81.
Grevera, G. J. and Udupa, J. K. (1996). Shape-based inter-
polation of multidimensional grey-level images. IEEE
Transactions on Medical Imaging, 15(6):881–92.
Herman, G. T., Zheng, J., and Bucholtz, C. A. (1992).
Shape-based interpolation. IEEE Computer Graphics
and Applications, 12(3):69–79.
Jones, M. W., Brentzen, J. A., and Sramek, M. (2006). 3D
distance fields: A survey of techniques and applica-
tions. IEEE Transactions on Visualization and Com-
puter Graphics, 12:581–599.
Kak, A. C. and Slaney, M. (1988). Principles of Computer-
ized Tomographic Imaging. IEEE Press.
Kniss, J., Premoze, S., Hansen, C., and Ebert, D. (2002).
Interactive Translucent Volume Rendering and Proce-
dural Modeling. In Proceedings of IEEE Visualization
Conference (VIS) 2002, pages 109–116.
Lerios, A., Garfinkle, C. D., and Levoy, M. (1995). Feature-
based volume metamorphosis. In Proceedings of the
22nd annual conference on Computer graphics and
interactive techniques, SIGGRAPH ’95, pages 449–
456.
Liu, L., Bajaj, C., Deasy, J., Low, D. A., and Ju, T. (2008).
Surface reconstruction from non-parallel curve net-
works. Computer Graphics Forum, 27(2):155–163.
ShapeTransformationofMultidimensionalDensityFunctionsusingDistributionInterpolationoftheRadonTransforms
11

Lorensen, W. E. and Cline, H. E. (1987). Marching cubes:
A high resolution 3D surface construction algorithm.
Computer Graphics, 21(4):163–169.
Neumann, L., Cs
´
ebfalvi, B., Viola, I., Mlejnek, M., and
Gr
¨
oller, E. (2002). Feature-Preserving Volume Fil-
tering . In VisSym 2002 : Joint Eurographics - IEEE
TCVG Symposium on Visualization, pages 105–114.
Raya, S. and Udupa, J. (1990). Shape-based interpolation
of multidimensional objects. IEEE Transactions on
Medical Imaging, 9(1):32–42.
Read, A. L. (1999). Linear interpolation of histograms. Nu-
clear Instruments and Methods, A425:357–360.
Schneider, J., Kraus, M., and Westermann, R. (2009). GPU-
based real-time discrete euclidean distance transforms
with precise error bounds. In International Confer-
ence on Computer Vision Theory and Applications
(VISAPP), pages 435–442.
Treece, G. M., Prager, R. W., Gee, A. H., and Berman,
L. H. (2000). Surface interpolation from sparse cross-
sections using region correspondence. IEEE Transac-
tions on Medical Imaging, 19(11):1106–1114.
Turk, G. and O’Brien, J. F. (1999). Shape transformation
using variational implicit functions. In Proceedings of
ACM SIGGRAPH 1999, pages 335–342.
Turk, G. and O’brien, J. F. (2002). Modelling with im-
plicit surfaces that interpolate. ACM Transanctions
on Graphics, 21(4):855–873.
GRAPP2014-InternationalConferenceonComputerGraphicsTheoryandApplications
12
