
Performance Analysis for GPU-based Ray-triangle Algorithms
Juan J. Jim´enez, Carlos J. Og´ayar, Jos´e M. Noguera and F´elix Paulano
Grupo de Gr´aficos y Geom´atica de Ja´en, University of Ja´en, Campus Las Lagunillas, Edificio A3, 23071, Ja´en, Spain
Keywords:
Ray-triangle Algorithms, Parallel Processing, Raytracing, Geometric Algorithms, Graphics Processors.
Abstract:
Several algorithms have been proposed during the past years to solve the ray-triangle intersection test. In this
paper we collect the most prominent solutions and describe how to parallelize them on modern programmable
graphics processing units (GPUs) by means of NVIDIA CUDA. This paper also provides a comprehensive
performance analysis based on several optional features and optimizations (such as back-face culling and the
use of pre-computed values) that allowed us to determine the influence of each factor on the performance.
Finally, we analyze the architecture of the GPU and its impact on the parallel implementation of each method,
as well as the approach used to achieve a high-performance fine-grained parallel computation on the ray-
triangle test.
1 INTRODUCTION
Triangles are one of the most used primitives in Com-
puter Graphics. Due to their simplicity, triangles
are used as the basic geometric elements for high-
performance applications, including real-time render-
ing. In consequence, the triangle mesh is the most
common structure used nowadays for representing
complex objects, and therefore most existing triangle-
based geometric algorithms can be applied on triangle
meshes in a natural way. This also applies to most
ray-triangle intersection test algorithms proposed in
the literature.
Ray-triangle and segment-triangle intersection
tests are basic algorithms used for solving many prob-
lems in Computer Graphics. This includes applica-
tions such as ray tracing, ray casting, inclusion tests,
boolean operations, object modeling, physics simula-
tion, collision detection, etc. Therefore, guaranteeing
the performance, robustness and accuracy of the in-
tersection test algorithms is paramount in the devel-
opment of the aforementioned applications.
On the other hand, parallel computing is one of
the best ways to improve the efficiency of a broad
class of geometric algorithms. For modern CPUs,
this is achieved by using all the available cores and
their SIMD architecture (Benthin, 2006), (Shevtsov
et al., 2007), (Havel and Herout, 2010). Also, cur-
rent GPUs can be used as a general purpose multipro-
cessor. This has motivated the adaptation of many
Computer Graphics algorithms to the GPU, result-
ing in implementations that typically outperform their
CPU-based counterparts. Examples include linear al-
gebra, image processing, collision detection (Lin and
Gottschalk, 1998), global illumination, etc. It is im-
portant to remark that not all algorithms can be effi-
ciently implemented on the GPU. Nevertheless, the
recent improvements of these architectures (mem-
ory, execution control, thread management, memory
bandwidth, etc.) are widely expanding their field of
application (Kim et al., 2007), (Rueda and Ortega,
2008).
One of the applications that can undoubtedly ben-
efit from these GPU improvements is the ray-triangle
intersection test. The parallelization of this test would
in turn result in an important improvement of the ray
tracing rendering technique (Glassner, 1989), (Ama-
natides and Choi, 1995), (Purcell et al., 2002), (Fo-
ley and Sugerman, 2005), (Aila and Laine, 2009) as
well as in all the other Computer Graphics applica-
tions mentioned above.
In this paper we present a comprehensive study of
ray-triangle intersection algorithms for high perfor-
mance applications based on modern programmable
graphics hardware. The algorithms included in this
study have been implemented in NVIDIA CUDA,
which provides a high level framework for imple-
menting general purpose algorithms on today’s GPUs.
We also study the performance of each algorithm
based on several factors that define a common criteria
for evaluating the best strategy in each case.
239
Jiménez J., Ogáyar C., Noguera J. and Paulano F..
Performance Analysis for GPU-based Ray-triangle Algorithms.
DOI: 10.5220/0004650002390246
In Proceedings of the 9th International Conference on Computer Graphics Theory and Applications (GRAPP-2014), pages 239-246
ISBN: 978-989-758-002-4
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

2 RAY-TRIANGLE ALGORITHMS
Fast ray-triangle intersection algorithms have been an
active field of research in Computer Graphics for a
long time. Several algorithms have been developed
in order to solve this problem in an efficient and ro-
bust manner, see (Plucker, 1865), (Badouel, 1990),
(M¨oller and Trumbore, 1997), (Segura and Feito,
1998), (Segura and Feito, 2001), (Jim´enez et al.,
2010). Albeit all these algorithms can be efficiently
implemented on the GPU, the peculiarities of the
GPU architecture make some of them more adaptable
than others. In this section we present an overview of
the ray-triangle intersection algorithms considered in
this study. A GPU-based parallel implementation of
these algorithms will be later provided in Section 3.
Note that in this paper we are mostly interested
on the aspects related to the adaptation of these meth-
ods to the parallel hardware. Therefore we will omit
the full description of the algorithms, referring to the
original publications instead.
Before beginning our study, some basic notations
about ray representation should be introduced. In
what follows we will use the parametric equation of
the ray. A ray R(t) with origin O and normalized di-
rection D is defined as (see Figure 1):
R(t) = O +tD
The value t is defined between 0 and infinity. A simi-
lar notation can be used when working with segments
instead of rays. Let Q
1
and Q
2
be the two points
that define the segment. Then, the segment can be
expressed as follows:
S(t) = Q
1
+ t(Q
2
− Q
1
)
With t in [0, 1]. This allows the use of the same
algorithms for both, rays and segments, with minor
changes. That is, most of ray-triangle algorithms
can be adapted to segment-triangle algorithms in a
straightforward manner, and vice versa. Therefore
and without loss of generality, we will refer only to
the ray-triangle case since the segment-triangle inter-
section test can be considered a specific case of the
first one.
Besides the ray, the triangle to be intersected is de-
fined as a list of three vertices (V
1
, V
2
, V
3
). Addition-
ally, the triangle normal can be either pre-calculated,
which is a common practice for the storage of trian-
gle meshes, or computed on the fly if the memory is
limited.
The common result of a ray-triangle intersection
algorithm is a boolean flag that indicates whether an
intersection is found or not. If so, the value for t is
usually calculated, that is, the distance between the
V
2
V
1
V
3
P
Q
1
Q
2
t
V
1
V
2
V
3
P
O
D
t
Figure 1: Left: sample configuration of a triangle and a ray
intersecting at the point P. Right: a triangle and a segment
intersecting at the point P.
origin of the ray and the intersection point. The inter-
section point can be determined by using the ray equa-
tion in a straightforward manner. Also, the barycen-
tric coordinates of the intersection point in the trian-
gle surface can be calculated if further processing is
required. A typical example includes the interpola-
tion of vertex attributes such as colors, texture coordi-
nates, normals, tangent vectors, etc. Nonetheless, not
all applications require the determination of this in-
tersection point. In these cases, the computation can
be omitted to obtain a significant improvement in the
performance of the intersection algorithm.
In the literature there exists a number of solutions
to the ray-triangle intersection test. Following we
summarize the most prominent ones.
Badouel’s algorithm. Badouel (Badouel, 1990) de-
signed a solution based on determining the inter-
section between the ray and the plane of the trian-
gle, the subsequent projection on a plane (XY, YZ
or ZX), and the computation of the intersection
point on the triangle by using 2D barycentric co-
ordinates.
M
¨
oller’s algorithm. M¨oller (M¨oller and Trumbore,
1997) developed an algorithm based on the so-
lution of an equation system formed by the ray
equation and the equation of the intersection point
between a ray and a triangle by using barycentric
coordinates with regard to the triangle. This algo-
rithm is an optimization of Badouel’s method, and
is widely considered as the fastest solution for the
generic case.
Segura’s algorithm. Segura (Segura and Feito,
1998) proposed a segment-triangle intersection
algorithm which computes the sign of the volume
of the tetrahedra formed by the triangle vertices
and the endpoints of the segment. This method
provides the boolean result of the intersection, but
it does not calculate the intersection point. If this
point is needed, it can be determined by means of
a classic ray-plane intersection algorithm, as well
as the value of t (Segura and Feito, 2001).
GRAPP2014-InternationalConferenceonComputerGraphicsTheoryandApplications
240

Jim
´
enez ’s algorithm. This solution (Jim´enez et al.,
2010) is partially based on the same foundations
than Segura’s algorithm. Jim´enez developed a
segment-triangle method based on the calculation
of the barycentric coordinates of the intersection
point with respect to a tetrahedron formed by the
triangle and one of the points of the segment.
This algorithm allows the calculation of the inter-
section point and its barycentric coordinates in a
straightforward fashion. The method can also be
optimized by precalculating some values when all
rays to be tested share the same origin.
Other algorithms. Other solutions include the use
of Pl¨ucker coordinates (Plucker, 1865), (Jones,
2000), the Watertight ray-triangle intersection
method proposed by Woop et al. (Woop et al.,
2013), and optimizations for ray tracing like the
solution adopted by Kensler et al. (Kensler and
Shirley, 2006).
3 GPU-BASED
IMPLEMENTATION
This section describes the design of the GPU-based
implementation of the diverse algorithms described in
the previous section. The implementation of these al-
gorithms was based on a set of common criteria in or-
der to highlight the impact that the characteristics of
each method has on its GPU parallelization. In addi-
tion, we have studied several optimizations and their
effect on the performance of each algorithm.
3.1 Common Basic Design
In our proposal, all the studied algorithms share
the same structure. So in what follows we will
present a common basic design for the implementa-
tion of a generic ray-triangle intersection test algo-
rithms adapted to the CUDA parallel programming
model.
In the first place, the ray-triangle algorithm itself
is coded into a CUDA kernel function. The data re-
quired for this algorithm is copied from the host mem-
ory to the GPU global memory. This includes the ver-
tices of the triangle and the ray to be tested for inter-
section. If the algorithm uses pre-computed data, they
are also copied to global memory. Figure 2 shows the
distribution of the kernels and the data into the CUDA
architecture.
Since the ray-trianglealgorithm is executed in par-
allel in multiple threads, the data set (vertices, rays
and pre-computed values) is arranged in arrays. Then,
CUDA GRID
Block (0,0)
Block (1,0)
Shared memory
x Triangle vertices
x Pre-calculated triangle data (if used)
x
Shared variables used by the algorithm
Thread 1
Global memory
x Pre-calculated data array
x Vertices array
x Rays/segments array
x Triangles array
x Results array
HOST
x Vertices
x Pre-calculated data
x Triangles
x Rays/segments
Thread 2
Thread 3
Thread 4
Thread 5
Thread n
Figure 2: The integration of the kernels and the data into
the CUDA architecture. Note that for the implementations
proposed, only the first thread of each block writes to shared
memory.
the kernel running in each thread uses its thread iden-
tifier for determining the position inside the arrays of
the specific portion of data that it should load. Specif-
ically, the data structure used to store the triangles is
based on two indexed arrays. The first one stores the
Cartesian coordinates of the vertices whereas the sec-
ond one stores the indices to the vertices for each tri-
angle. This structure allows the sharing of vertices
between triangles, which is a common practice for
storing triangle meshes, especially within the GPU.
The first approach that we implemented treated
threads as isolated computing units. That is, no
data was shared and every thread read the needed
data directly from global memory. As expected, this
na¨ıve implementation produced poor performance be-
cause of the long-latency of the global memory ac-
cess operations. This preliminary implementation
was improved to make use the shared memory of each
CUDA block. Since this kind of memory is built on-
chip, memory accesses from the threads to the data
stored in the shared memory can be performed at
higher speed than to the global memory.
In the case of the ray-triangle intersection algo-
rithms, there exist two kinds of data that are poten-
tially candidates to be shared between the threads
of a given block: the set of triangles and the set of
rays. However, we should take into account that the
amount of data required to describe a triangle (three
points plus the pre-computed data) is greater than the
PerformanceAnalysisforGPU-basedRay-triangleAlgorithms
241

amount of data needed to describe a ray or a seg-
ment (a point and a vectoror two points, respectively).
Moreover, the indexed array structure used to store
shared vertices and triangles would force the algo-
rithm to perform two memory accesses for retrieving
a single vertex: one for obtaining the vertex index in-
side the triangles array, and another one for loading
the actual Cartesian coordinates of the vertex inside
the vertices arrays. For these reasons we consider that
it is more efficient to share the data related to the tri-
angles than the rays. As a result, in our solution the
triangle data is shared among all the threads of a given
grid, whilst each individual thread reads its own and
unique set of rays.
Another important aspect is the granularity of the
parallel execution, which is controlled by the number
of rays that each kernel uses. For a fine-grained ap-
proach, each kernel execution only calculates the ray-
triangle test with one ray, as shown in Figure 2. Note
that the highly multithreaded architecture of the GPU
encourages the use of massive, fine-grained data par-
allelism in CUDA (Kirk and Hwu, 2010). In our pro-
posed implementation, a grid of m× n blocks is used
for the CUDA execution. Each block handles a trian-
gle, and the corresponding threads of the block cal-
culate the ray-triangle test between that triangle and
the set of rays. If there are more rays than threads per
block, the kernel will be executed multiple times in
order to test the entire set of rays.
The basic scheme of the proposed implementa-
tions works as follows.
1. The first step performs the initialization of the
shared data. This includes loading the Cartesian
coordinates of the vertices. Any existing pre-
computed data is also loaded during this step. The
shared data initialization is performed by the first
thread of each block (Kirk and Hwu, 2010). The
remaining threads of the block await until this step
is finished, because they cannot continue until all
the required data is available. This step ends with
a barrier synchronization.
2. This step is the main part of the kernel. At this
point, every thread can access the required data, as
it is already cached on shared memory. Then, the
actual ray-triangle intersection test is performed.
3. The last step consists of storing the results of the
tests into global memory, so they can be eventu-
ally copied to host memory once the kernel fin-
ishes its execution (Kirk and Hwu, 2010). Fig-
ure 2 shows the data flow between the different
memory levels. In order to increase the perfor-
mance, only the result of positive tests is written
into global memory. This allows the omission of a
global memory access if the algorithm ends with a
rejection. In order to obtain correct results, the ar-
ray containing the results must be initialized with
the intersection flag set to false before the kernel
execution. Note that this whole step can be omit-
ted if we intend to keep the results on GPU mem-
ory for a later use (e.g. real-time ray tracing).
As mentioned above, the data of the triangles are
shared between all the threads, and only one group of
access operations is performed for every block. Un-
fortunately, every individual thread must read the ray
data directly from global memory, and this process
cannot be simplified. Nevertheless, when all threads
in a warp perform a load instruction, the GPU de-
tects whether the threads access consecutive global
memory locations. If this is the case, then the GPU
combines or coalesces these accesses into a single ac-
cess to a block of ordered data (Kirk and Hwu, 2010),
which greatly increases the performance. Therefore,
in our implementation the access to the array contain-
ing the rays has been designed to follow this scheme.
If the granularity is greater than one, each thread per-
forms the ray-triangle test for a subset of triangles
using a loop. As a result, in order to allow the sys-
tem to coalesce the accesses, the rays must be stored
in global memory following an interleaved pattern.
Thus, for a given iteration of the kernel, all the rays
required by the threads are stored consecutively.
3.2 Algorithm-specific Aspects
The ray-triangle methods contempled in this study
have a nearly direct translation to CUDA. The most
common change was the use of the CUDA data
types, especially vectors such as float3 or int3, and
built-in mathematical functions. Some algorithms re-
quired additional changes to the original code, such
as Badouel’s method, because it uses variable indices
for accessing the vertices coordinates depending on
the projection used (to XY, XZ orYZ plane). The con-
versions of M¨oller’s and Pl¨ucker’s methods were ob-
tained in a straightforward manner, because of their
simplicity.
We would like to remark that we firstly imple-
mented a unique kernel for each algorithm. These
kernels were highly parametrizable because we were
interested in studying their behavior after enabling or
disabling different features, e.g., back-face culling,
the use of pre-computed data, etc. Unfortunately
we found out that the additional logic required to
handle these parameters within the kernel (branch-
ing and conditional instructions) affected the perfor-
mance, even when the execution path was the same
for every thread. This performance penalty made it
harder to evaluate the impact of each tested factor. As
GRAPP2014-InternationalConferenceonComputerGraphicsTheoryandApplications
242

a result, we decided to implement different kernels in
order to faithfully test the desired combination of fea-
tures.
4 RESULTS AND DISCUSSION
In order to carry out a complete evaluation, all algo-
rithms have been implemented in both the CPU and
the GPU. The CPU-based implementations serve as
a baseline reference for the study, and allow us to
measure the performance implications of the charac-
teristics of each algorithm. A more detailed anal-
ysis of CPU-based implementations of several ray-
triangle algorithms is presented in (Jim´enez et al.,
2010), which follows the test methodology presented
in (L¨ofstedt and Akenine-M¨oller, 2005).
The computer used for our experimentation was
a PC equipped with an Intel Core 2 Quad Proces-
sor at 2.4GHz with 4GB RAM. The GPU used was
a GeForce GTX560Ti with 1GB RAM. An increas-
ing number of CPU cores were used for the CPU
implementations with OpenMP, and the algorithms
scaled as expected. The performance was measured
in millions of ray-triangle intersections per second.
All methods were tested with several triangle meshes
featuring different complexities and topologies. The
set of segments was randomly generated using the
bounding box of each triangle mesh and a minimum
length to ensure a better distribution of the intersec-
tion cases. The set of rays was generated in a simi-
lar manner, but without the length restriction. Single-
precision floating-point numbers were used for all the
implementations.
In the following subsections, we present the re-
sults of some of the most relevant tests carried out
during our experimentation. We first report the per-
formance of the basic implementation of each algo-
rithm in the CPU and GPU. Next, we report the in-
fluence in the performance of different features for
each evaluated algorithm. The tested features include
back-face culling, segment intersections, the use of
pre-computed data, and the cost of determining the
intersection point on the triangle surface (the barycen-
tric coordinates and the t parameter). Also, we have
tested an additional configuration consisting of a set
of rays with a common origin. This experiment aimed
at simulating a ray casting process. This wide set of
experiments and configurations allowed us to draw
several conclusions.
4.1 Performance
Table 1 shows the performance of a basic ray-triangle
implementation of each method, that is, without the
additional features mentioned above. For each 3D
model, the Table shows the variation of the perfor-
mance of the studied algorithms with an increasing
number of CPU cores and the GPU. In any case the
total number of intersections computed was below 50
million per second, because the peak performance of
the GPU is achieved for a high number of tests. Also,
the performance depended on the topology of each
mesh and the spatial distribution of its triangles, al-
though the differences were subtle.
Table 1 also shows the performance gain of each
version when compared to the equivalent single-core
CPU implementation. The performance gain of the
methods running on the GPU mostly depended on
their ratio of floating-point arithmetic instructions
over conditional and flow control instructions. This
result is consistent with the expected behavior of the
GPU, which typically favors the former type of op-
erations over the later. From Table 1 we observe
that in general, the increment in the performance of
the Badouel’s algorithm was less significant than the
other algorithms. This is likely caused by the opera-
tions required to project the triangles into the XY, XZ
or YZ planes, which depend on the normal of each
triangle. On the contrary, the most important incre-
ment in the performance was obtained by the algo-
rithm based on the Pl¨ucker coordinates. This stems
from the fact that it has few flow control instructions
and focuses on mathematical operations instead.
We also noticed that in general, the CPU scal-
ability is very predictable, although some methods
needed more tests than others in order to achieve its
maximum performance. Therefore, this result con-
firms our hypothesis that the single-core CPU tests
were adequate as a baseline reference for the tests on
the GPU.
It is also noteworthy to mention that several to-
day’s CPUs feature a set of SIMD instructions known
as SSE. In theory, this set of instructions can increase
the performance of the algorithms by a factor of 4.
But despite this, we decided not to implement a SIMD
version of the CPU-based algorithms because some of
them do not translate well into the SSE programming
paradigm. For further information, we refer to sev-
eral works that show how to implement a ray-triangle
algorithm using SSE (Shevtsov et al., 2007), (Havel
and Herout, 2010), (Noguera et al., 2009).
Besides, the SPMD type of parallelism of the GPU
makes it more efficient than the CPU using SSE ex-
tensions, which is an SIMD model. With SSE, all
PerformanceAnalysisforGPU-basedRay-triangleAlgorithms
243

Table 1: Experimental results of a simple ray-triangle test. Values are in millions of intersection tests per second. Secondary
values are the performance gain factors with respect to the single-core CPU implementation.
CPU x1
CPU x2
CPU x4
GPU
Mi/s
Mi/s
Gain
Mi/s
Gain
Mi/s
Gain
Bunny
69.451
triangles
Badouel
10,86
21,54
1,98x
30,78
2,83x
1051,72
96,76x
Möller
20,04
39,58
1,97x
79,10
3,95x
2641,23
131,74x
Segura
13,75
27,18
1,98x
43,73
3,18x
1822,03
132,50x
Jiménez
16,94
33,67
1,99x
67,06
3,96x
2637,06
155,62x
Plücker
13,46
26,68
1,98x
51,27
3,81x
1944,71
144,38x
Sculpture
277.004
triangles
Badouel
12,54
24,93
1,99x
36,88
2,94x
1064,42
84,82x
Möller
21,75
42,92
1,97x
85,60
3,93x
2742,03
126,02x
Segura
13,77
27,50
1,99x
33,10
2,40x
1831,51
132,95x
Jiménez
19,02
37,60
1,98x
74,95
3,94x
2677,63
140,75x
Plücker
13,65
27,18
1,99x
54,28
3,98x
1981,39
145,15x
Dragon
871.414
triangles
Badouel
12,82
25,41
1,98x
38,75
3,02x
1266,63
98,75x
Möller
21,98
43,41
1,97x
86,64
3,94x
2744,28
124,81x
Segura
13,66
27,09
1,98x
42,60
3,12x
1823,45
133,44x
Jiménez
19,26
38,08
1,98x
75,85
3,94x
2667,47
138,47x
Plücker
13,56
26,87
1,98x
53,74
3,96x
1945,56
143,46x
Buddha
1.087.716
triangles
Badouel
13,15
25,84
1,97x
31,71
2,41x
1285,58
97,75x
Möller
21,99
42,93
1,95x
85,93
3,91x
2746,81
124,88x
Segura
13,71
26,96
1,97x
44,28
3,23x
1824,86
133,06x
Jiménez
19,69
38,42
1,95x
76,74
3,90x
2667,16
135,42x
Plücker
13,55
26,56
1,96x
53,30
3,93x
1945,96
143,60x
processing units should execute the same instruction
at the same time. In the SPMD system of the GPU,
all available cores execute the same kernel on multi-
ple parts of the data. However, the difference resides
in the fact that the processors do not have to be exe-
cuting the same instruction at the same time, and the
execution order of the different groups of cores can
be scheduled to avoid stalls caused by long-latency
operations (e.g., global memory accesses and branch
instructions).
Another drawback of the SSE programming
paradigm is caused by the meticulous packaging of
the data required before processing them with an
SIMD instruction. This packaging of the data is a re-
sponsibility left to the programmer. That is, the scal-
ability and granularity control must be handled by the
CPU programmers, and thus, the design of the algo-
rithms become more complicated. By contrast, the
SIMT nature of the GPU allows a transparent way to
handle the scalability of the algorithms.
4.2 Optional Features
We have carried out some additional experiments with
alternative versions of each algorithm. These tests
were designed to highlight the influence of different
optional features (such as back-face culling, usage of
pre-computed values or the calculation of the inter-
section point attributes) in the performance. Our mo-
tivation to independently study the impact of these
features came from the fact that most optimizations
reported in the literature for ray-triangle algorithms
heavily rely on these features, especially the usage of
pre-computed data.
Table 2 reports the performance gain obtained by
including or omitting each feature. Clearly, we ob-
serve that enabling these features increases the perfor-
mance in the single-core CPU scenario, which is the
expected result. However, we also see that some of
these popular optimizations can be counterproductive
on the GPU (that is, the performance gain is almost
zero or negative). Following, each feature is discussed
in detail.
Calculation of the intersection point attributes.
The calculation of the barycentric coordinates
of the intersection point between the ray and the
triangle did not noticeably affect the performance,
whichever the version. Therefore, this feature
can be safely used in any implementation without
losing efficiency.
Back-face culling. This process discards triangles
with the same orientation than the ray, that is,
when the cosine of the angle between the trian-
gle normal and the ray is positive. We found out
that this optimization had a positive impact on the
performance of most algorithms, especially on the
CPU. This increment depended on the number of
operations that each algorithm needed to perform
before the back-face test can be carried out. On
the GPU the performance gain was smaller, al-
though it is always positive and therefore conve-
nient to use.
Segment-triangle algorithms. Some applications
require intersecting segments instead of rays.
We found out that working with segments is not
GRAPP2014-InternationalConferenceonComputerGraphicsTheoryandApplications
244
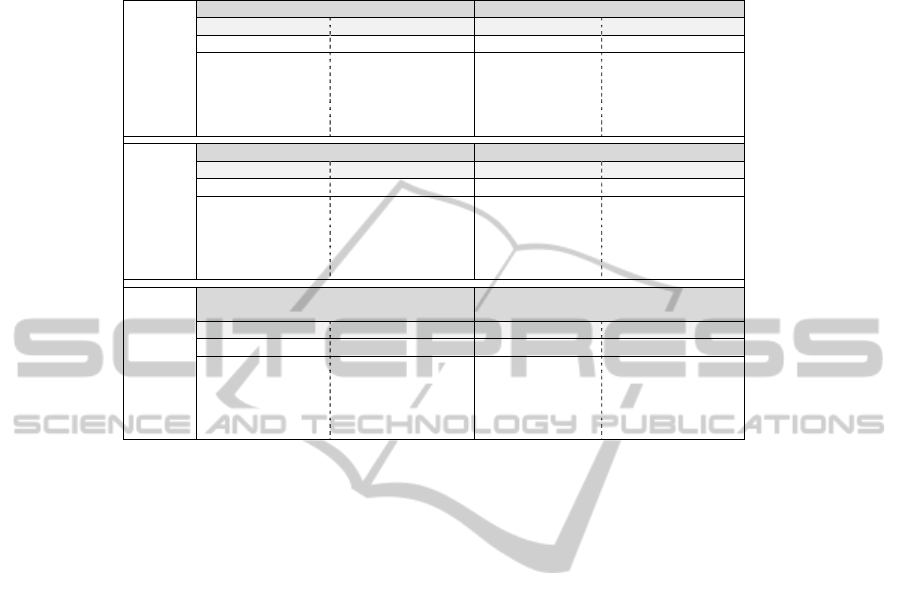
Table 2: Experimental results of ray-triangle tests using several features. Values are in millions of intersection tests per
second. The percentage gain of each version is related to the performance of the same algorithm running on the same
hardware but without features. The triangle mesh used was Buddha. The total number of ray-triangle intersections for each
test was 1 billion.
Intersection point attributes
Back-face culling
CPU x1
GPU
CPU x1
GPU
Mi/s
Gain
Mi/s
Gain
Mi/s
Gain
Mi/s
Gain
Badouel
13,17
0,2%
1289,63
0,3%
18,00
36,9%
1485,26
15,5%
Möller
22,13
0,6%
2751,68
0,2%
25,86
17,6%
2888,26
5,1%
Segura
13,75
0,3%
1831,48
0,4%
19,93
45,4%
1987,34
8,9%
Jiménez
19,49
-1,0%
2666,84
0,0%
26,29
33,5%
2668,81
0,1%
Plücker
13,96
3,0%
1946,01
0,0%
14,60
7,7%
1946,14
0,0%
Segment-triangle intersections
Pre-computed data
CPU x1
GPU
CPU x1
GPU
Mi/s
Gain
Mi/s
Gain
Mi/s
Gain
Mi/s
Gain
Badouel
13,87
5,5%
1275,23
-0,8%
16,22
23,3%
1282,12
-0,3%
Möller
22,09
0,5%
2746,80
0,0%
22,12
0,6%
2739,25
-0,3%
Segura
14,01
2,2%
1836,02
0,6%
15,78
15,1%
1821,91
-0,2%
Jiménez
21,68
10,1%
2667,14
0,0%
24,73
25,6%
2664,25
-0,1%
Plücker
13,54
-0,1%
1946,05
0,0%
16,28
20,2%
1945,01
0,0%
Interference test:
culling+segments+p.data
Ray casting (shared origin):
attributes+p.data
CPU x1
GPU
CPU x1
GPU
Mi/s
Gain
Mi/s
Gain
Mi/s
Gain
Mi/s
Gain
Badouel
24,48
86,1%
1484,88
15,5%
16,13
22,7%
1413,20
9,9%
Möller
25,86
17,6%
2887,83
5,1%
25,52
16,0%
2783,49
1,3%
Segura
26,99
96,8%
1983,23
8,7%
16,94
23,6%
1880,90
3,1%
Jiménez
42,69
116,8%
2669,00
0,1%
32,08
62,9%
2681,24
0,5%
Plücker
17,71
30,7%
1946,25
0,0%
17,15
26,6%
1995,10
2,5%
noticeably faster that working for rays for most
of the algorithms. The exceptions were Segura’s
and Jim´enez’s methods, which are specifically
optimized for this type of test. However, this
improvement only applies to the CPU scenario,
since we found no improvement on the GPU.
This is because the segment-triangle test adds an
additional check on the t parameter that implies
additional flow-control instructions.
Pre-processing. According to our experiments, us-
ing pre-calculated values is a very interesting way
to increase the performance of most CPU-based
ray-triangle algorithms. The only exception was
the M¨oller’s algorithm, which does not rely on
any pre-calculated data. In contrast, our experi-
ments also showed that the use of pre-calculated
values is typically counterproductive in the GPU
environment. This stems from the fact that the
time required for a GPU to compute these val-
ues is actually smaller than the time required to
fetch them from memory. This fact is relevant
because the use of pre-computed values is a uni-
versally acepted way to improve the efficiency of
this kind of algorithms on the CPU. However, the
reported results evident that this optimization is
futile on the GPU. As a rule of thumb, a pre-
computed value must save a very large amount
of calculations in order to be worthwhile on a
GPU. The ray-triangle algorithms typically use
pre-calculated values to save single cross prod-
ucts or simple operations with vectors in run-time.
However, a GPU can handle these operations very
fast in a highly parallel way.
As can be appreciated, the optional algorithm fea-
tures do not have a significant impact on the perfor-
mance of the GPU-based implementations. Interest-
ingly, the calculation of the attributes of the intersec-
tion point can be carried out without a noticeable per-
formance loss. For the time-saving features, on the
other hand, only the use of back-face culling implies
some actual advantage on the GPU.
We have performed additional experiments based
on the combination of several features that could be
interesting for common applications, such as interfer-
ence tests and ray casting. For evaluating the perfor-
mance in a ray casting application, we created a set of
rays that shared the same origin. Table 2 shows the re-
sults obtained under these circumstances. These con-
figurations increased the efficiency of all the methods
running on the CPU. However, the gain is more sub-
tle with the GPU, although remarkable in some cases.
Generally speaking, M¨oller’s and Jim´enez’s were the
most efficient ray-triangle algorithms for the major-
ity of situations. Specifically, on the CPU the fastest
method was Jim´enez’s when using back-face culling,
pre-computed data and/or a shared origin for the rays.
However, on the GPU the M¨oller’s method outper-
formed the others in every aspect.
PerformanceAnalysisforGPU-basedRay-triangleAlgorithms
245

5 CONCLUSIONS
In this paper we have presented a comprehensiveanal-
ysis of several ray-triangle intersection algorithms
and their implementation in GPU using CUDA. When
programminghigh-performanceGPU algorithms, it is
important to keep in mind that the GPU architecture
forces the developer to adopt different principles than
the CPUs. Following these principles, this paper has
proposed some common design guidelines for suc-
cessfully porting most of the ray-triangle algorithms
to the GPU. Our exposition describes relevant aspects
such as the kernel implementation, memory access is-
sues and synchronization between threads.
We have also compared these GPU-based versions
with the original CPU implementations. A thorough
study of the influence of several optional features and
performance optimizations has also been reported. In-
terestingly, our experiments show that the use of pre-
computed values (a typical optimization used by most
CPU ray-triangle algorithms) is no longer required
and even counterproductive. Also, those optimiza-
tions that require additional branch control instruc-
tions or global memory accesses should be minimized
or avoided if possible, even if they apparently save
some computations.
ACKNOWLEDGEMENTS
This work has been supported by the Ministerio de
Econom
´
ıa y Competitividad of Spain and the Euro-
pean Union (via ERDF funds) through the research
project TIN2011-25259.
REFERENCES
Aila, T. and Laine, S. (2009). Understanding the efficiency
of ray traversal on gpus. In Proc. High-Performance
Graphics 2009, pages 145–149.
Amanatides, J. and Choi, K. (1995). Ray tracing triangular
meshes. In Proc. Western Computer Graphics Sympo-
sium, pages 43–52.
Badouel, D. (1990). An efficient ray-polygon intersection.
In Graphics Gems I, pages 390–394. Academic Press
Inc.
Benthin, C. (2006). Realtime Ray Tracing on current CPU
Architectures. PhD thesis, Saarland University.
Foley, T. and Sugerman, J. (2005). Kd-tree accelera-
tion structures for a gpu ray tracer. In Proc. of the
ACM Siggraph/Eurographics Conference on Graph-
ics Hardware, pages 15–22.
Glassner, A. (1989). An Introduction to Ray Tracing. Aca-
demic Press, New York.
Havel, J. and Herout, A. (2010). Yet faster ray-triangle in-
tersection (using sse4). IEEE Trans. Visualization and
Computer Graphics, 16(3):434–438.
Jim´enez, J. J., Segura, R. J., and Feito, F. R. (2010). A
robust segment/triangle intersection algorithm for in-
terference tests. efficiency study. Computational Ge-
ometry: Theory and Applications, 43(5):474–492.
Jones, R. (2000). Intersecting a ray and a triangle with
pl¨ucker coordinates. Ray Tracing News, 13(1).
Kensler, A. and Shirley, P. (2006). Optimizing ray-triangle
intersection via automated search. In Proc. IEEE Sym-
posium on Interactive Ray Tracing, pages 33–38.
Kim, S., Nam, S., Kim, D., and Lee, I. (2007). Hardware-
accelerated ray-triangle intersection testing for high-
performance collision detection. In Proc. Journal of
WSCG, volume 15.
Kirk, D. and Hwu, W. (2010). Programming Massively Par-
allel Processors. Morgan Kaufmann.
Lin, M. and Gottschalk, S. (1998). Collision detection be-
tween geometric models: A survey. In Proc. IMA
Conf. on Mathematics of Surfaces, pages 37–56.
L¨ofstedt, M. and Akenine-M¨oller, T. (2005). An eval-
uation framework for ray-triangle intersection algo-
rithms. Journal of Graphics Tools, 10(2):13–26.
M¨oller, T. and Trumbore, B. (1997). Fast, minimum storage
ray-triangle intersection. Journal of Graphics Tools,
2(1):21–28.
Noguera, J., Urena, C., and Garc´ıa, R. (2009). A vector-
ized traversal algorithm for ray tracing. In Proc. of the
Fourth International Conference on Computer Graph-
ics Theory and Applications (GRAPP 2009), pages
58–63. INSTICC Press.
Plucker, J. (1865). On a new geometry of space. Phil. Trans.
Royal Soc. London, 155:725–791.
Purcell, T. J., Buck, I., Mark, W. R., and Hanrahan, P.
(2002). Ray tracing on programmable graphics hard-
ware. ACM Transactions on Graphics, 21(3):703–
712.
Rueda, A. J. and Ortega, L. (2008). Geometric algo-
rithms on cuda. In Proc. 3rd International Confer-
ence on Computer Graphics Theory and Applications
(Grapp), pages 107–112.
Segura, R. J. and Feito, F. R. (1998). An algorithm for deter-
mining intersection segment-polygon in 3d. Computer
and Graphics, 22(5):587– 592.
Segura, R. J. and Feito, F. R. (2001). Algorithms to test
ray-triangle intersection. comparative study. Journal
of WSCG, 9(3):76–81.
Shevtsov, M., Soupikov, A., and Kapustin, A. (2007). Ray-
triangle intersection algorithm for modern cpu archi-
tectures. In Proc. International Conference on Com-
puter Graphics and Vision (GraphiCon 2007).
Woop, S., Benthin, C., and Wald, I. (2013). Watertight
ray/triangle intersection. Journal of Computer Graph-
ics Techniques (JCGT), 2(1):65–82.
GRAPP2014-InternationalConferenceonComputerGraphicsTheoryandApplications
246
