
Egocentric Activity Recognition using Histograms of Oriented Pairwise
Relations
Ardhendu Behera, Matthew Chapman, Anthony G. Cohn and David C. Hogg
School of Computing, University of Leeds, LS2 9JT, Leeds,U.K.
Keywords:
Egocentric Activity Recognition, Histogram of Oriented Pairwise Relations (HOPR), Spatio-temporal
Relationships, Pairwise Qualitative Relations, Bag-of-visual-words.
Abstract:
This paper presents an approach for recognising activities using video from an egocentric (first-person view)
setup. Our approach infers activity from the interactions of objects and hands. In contrast to previous ap-
proaches to activity recognition, we do not require to use an intermediate such as object detection, pose estima-
tion, etc. Recently, it has been shown that modelling the spatial distribution of visual words corresponding to
local features further improves the performance of activity recognition using the bag-of-visual words represen-
tation. Influenced and inspired by this philosophy, our method is based on global spatio-temporal relationships
between visual words. We consider the interaction between visual words by encoding their spatial distances,
orientations and alignments. These interactions are encoded using a histogram that we name the Histogram of
Oriented Pairwise Relations (HOPR). The proposed approach is robust to occlusion and background variation
and is evaluated on two challenging egocentric activity datasets consisting of manipulative task. We introduce
a novel representation of activities based on interactions of local features and experimentally demonstrate its
superior performance in comparison to standard activity representations such as bag-of-visual words.
1 INTRODUCTION
In this work, we address the problem of recognising
activities using video from a wearable camera (ego-
centric view). Several approaches have been pro-
posed in the past to address the problem of generic
activity recognition (Moeslund et al., 2006; Turaga
et al., 2008; Aggarwal and Ryoo, 2011). These ap-
proaches use various types of visual cues and compare
them using some similarity measure. In the course
of the last decade or so, activity recognition has re-
ceived increasing attention due to its far-reaching ap-
plications such as intelligent surveillance systems,
human-computer interaction, and smart monitoring
systems. Researchers are now advancing from recog-
nising simple periodic actions such as ‘clapping’,
‘jogging’, ‘walking’ (Schuldt et al., 2004; Blank
et al., 2005) to more complex and challenging activ-
ities involving multiple persons and objects (Laptev
et al., 2008; Kuehne et al., 2011; Liu et al., 2009a;
Gupta and Davis, 2007). Even more recently, there
has been growing interest in activity recognition from
an egocentric approach using first-person wearable
cameras (Fathi et al., 2011b; Kitani et al., 2011; Fathi
et al., 2011a; Aghazadeh et al., 2011). Most real-
q q q
. . .
Classifier
Histogram of Oriented
Pairwise Relations (HOPR)
Figure 1: Hierarchical framework for activity recogni-
tion: 1) detected keypoints representing visual features (e.g.
SURF (Bay et al., 2006)) in an image (top-left), 2) fil-
tered keypoints based on their strength with assigned code-
words using K-means clustering (top-right), 3) extraction
of pairwise relations between keypoints belonging to the
same codewords (middle row), 4) histogram of oriented
pairwise relations (HOPR) representation of these extracted
relations, which is used for framewise classification of ac-
tivity using a classifier. The wrist marker in images are used
for the detection and tracking of wrist in the existing method
(Behera et al., 2012b).
22
Behera A., Chapman M., G. Cohn A. and C. Hogg D..
Egocentric Activity Recognition using Histograms of Oriented Pairwise Relations.
DOI: 10.5220/0004655100220030
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 22-30
ISBN: 978-989-758-004-8
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

world activity recognition systems utilize a bag-of-
visual words paradigm, which use spatio-temporal
features (Schuldt et al., 2004; Doll
´
ar et al., 2005;
Blank et al., 2005; Ryoo and Aggarwal, 2009). These
features are shown to be robust to the changes in light-
ing and invariant to affine transformations. These
approaches are designed to classify activities after
fully observing the entire sequence assuming each
video contains a complete execution of a single ac-
tivity. However, such features alone are often not
enough for modelling complex activities as the same
action pattern can produce a variety of different move-
ment patterns. For example, while cooking pasta,
one can pour water using one hand while the other
hand is used for stirring and perform actions sequen-
tially using one hand. In order to improve the recog-
nition performance of complex activities, recently
there is a growing interest in modelling the spatial
distributions of the above-mentioned spatio-temporal
features (Matikainen et al., 2010; Ryoo and Aggar-
wal, 2009; Sun et al., 2009; Gilbert et al., 2009).
Such ideas are inherited from object recognition ap-
proaches (Savarese et al., 2006; Shechtman and Irani,
2007; Liu et al., 2008; Deselaers and Ferrari, 2010).
In this paper, we address the problem of recogniz-
ing activities in an egocentric setting. Our approach
considers the interactions between feature descriptors
as a discriminating cue for recognising activities. The
framework of the proposed approach is presented in
Fig. 1. The proposed approach is in contrast to tradi-
tional approaches where interaction between objects
and wrists are often used for recognising activities
(Fathi et al., 2011a; Gupta and Davis, 2007; Behera
et al., 2012b; Behera et al., 2012a). Such approaches
use pre-trained object detectors. Moreover, our ap-
proach can recognise activities using a single frame
and can make a decision before observing the en-
tire video. This is very helpful for real-time moni-
toring systems. There also have been previous ap-
proaches which are successful for recognising activi-
ties using single frames (Niebles and Li, 2007; Fathi
et al., 2011a). However, they are limited to either sim-
ple activities or require pre-trained object detectors.
In this work, we introduce a new descriptor called
Histogram of Oriented Pairwise Relations (HOPR)
for recognising activities in egocentric settings. The
proposed descriptor captures the interactions between
the extracted features/patches such as SIFT (Lowe,
2004), STIP (Laptev and Lindeberg, 2003), SURF
(Bay et al., 2006) and summarises the pairwise re-
lationships structure between them within an image.
This provides the basis for activity classification and
does not require any object detector. We demon-
strate the advantages of our representation by eval-
uating it on challenging egocentric datasets, which
are publicly available namely GTEA (GeorgiaTech
Egocentric Activities) consisting of kitchen activities
(Fathi et al., 2011b) and Leeds’ egocentric dataset
(‘labelling and packaging bottles’) for manipulative
tasks (Behera et al., 2012b). In order to recognise ac-
tivities, the proposed method captures the wrist-object
interactions using pairwise relationships between vi-
sual words. Therefore, we evaluate our method on
egocentric datasets because poses and displacements
of manipulated objects are consistent in workspace
coordinates with respect to an egocentric view.
2 PREVIOUS WORK
Several different approaches for activity recognition
can be found in the computer vision literature (Moes-
lund et al., 2006; Turaga et al., 2008; Aggarwal and
Ryoo, 2011). In this work, we mainly concentrate on
activity recognition involving spatial distribution of
visual words in an egocentric setup, which is the focus
of our work. To our knowledge, there is no existing
previous work which uses the distribution of visual
words for recognising egocentric activities. However,
they do appear in a different context in the literature.
Therefore, we discuss both the approaches.
Pairwise relationships in the form of correlo-
grams, constellations, star topologies and parts model
have been used frequently in static image analysis
(Savarese et al., 2006; Crandall and Huttenlocher,
2006; Carneiro and Lowe, 2006). Practical limita-
tions have prevented transitioning of these methods
into video (Matikainen et al., 2010). Therefore, dif-
ferent approaches have been adopted for recognis-
ing activities in videos using pairwise relationships.
Matikainen et al. (2010) proposed a method for ac-
tivity recognition by encoding pairwise relationships
between fragments of trajectories using sequencing
code map (SCM) quantisation. Ryoo and Aggar-
wal (2010) presented a spatio-temporal relationships
match for recognising activities that uses relationships
between spatio-temporal cuboids. Sun et al. (2009)
proposed a method for recognising actions by explor-
ing the spatio-temporal context information encoded
in unconstrained videos based on the SIFT-based tra-
jectory, in a hierarchy of three abstraction levels.
In this work, the main objective is to recognise ac-
tivities from the egocentric viewpoint and is quite dif-
ferent from the above-mentioned approaches. Real-
time recognition of American sign language is the
first to use an egocentric setup and is proposed by
(Starner and Pentland, 1995). Lately, Behera et al.
(2012b) described a method for real-time monitor-
EgocentricActivityRecognitionusingHistogramsofOrientedPairwiseRelations
23

ing of activities using bag-of-relations in an industrial
setup. Fathi et al. (2011a) presented a hierarchical
model of daily activities by exploring the consistent
appearance of objects, hands and actions from the
egocentric viewpoint. Aghazadeh et al. (2011) ex-
tracted novel events from daily activities and Kitani
et al. (2011) identified ego-action categories from a
first-person viewpoint.
Most of the above-mentioned approaches are de-
signed to perform after-the-fact classification of ac-
tivities after fully observing the activities. Further-
more, they often require object detectors for detecting
wrists and objects as object-wrist interactions have
been used as cue for discriminating activities. Our
proposed approach initiates a framework in which
complex activities can be recognised using a single
frame in real-time without using any object detector.
The proposed novel Histogram of Oriented Pairwise
Relations (HOPR) captures the interaction between
visual descriptors (SURF) and represents them as a
relational structure that encodes the pairwise relation-
ships.
3 PROPOSED MODEL
A video sequence v
i
= {I
1
... I
T
} consists of T im-
ages. Every image I
t=1...T
is processed to extract
a set of keypoints S
t
= { f }. Each keypoint f =
( f
desc
, f
loc
, f
st
) is represented by a feature descriptor
f
desc
, its xy position f
loc
in the image plane and its
strength f
st
representing the quality of the keypoints.
Here, keypoints refer to the detection and description
of local features such as SIFT (Lowe, 2004), SURF
(Bay et al., 2006) and STIP (Laptev and Lindeberg,
2003). However, STIP requires more than a frame in
order to extract the feature descriptors.
First, we select a subset of keypoints by consider-
ing their strength f
st
(Fig. 1 top). All the keypoints
in the set S
t
are sorted with decreasing f
st
and iter-
ated over each keypoint from the highest to the lowest
strength. In each iteration, the keypoints F which are
within a radius p (image plane) w.r.t. to the given
keypoint f
i
are removed from the set S
t
i.e.
F = || f
loc
i
− f
loc
j
|| < p,∀ f
i
, f
j
∈ S
t
and i 6= j
S
t
= S
t
− F
(1)
where || f
loc
i
− f
loc
j
|| is the Euclidean distance between
the locations of a pair of keypoints f
i
and f
j
. In our
experiment we set p = .05 × image height.
Secondly, we encode a keypoint f with K code-
words α
1
... α
K
using only the descriptor f
desc
part of
the keypoints. In order to achieve this, we generate a
codebook of size K using a standard K-means cluster-
ing algorithm. If we denote the center of the jth clus-
ter as mean
j
, then each keypoint f ∈ S = {S
1
... S
T
}
is mapped into the nearest codeword via
α
i
(S ) = { f | f ∈ S ∧ i = argmin
j
|| f
desc
− mean
j
||}
(2)
where || f
desc
− mean
j
|| denotes the Euclidean dis-
tance between feature descriptor f
desc
and mean
j
.
As a result, we have decomposed the set S into K
subsets, α
1
(S ),. .., α
k
(S ) based on the keypoints de-
scriptor. This is the quantisation step of the stan-
dard bag-of-word approach used in literature (Behera
et al., 2012b; Ryoo and Aggarwal, 2009; Laptev et al.,
2008).
In the third step, we extract relations between
all possible pairs of keypoints within a subset
α
1
(S ),. .., α
k
(S ) i.e. the relations between keypoints
assigned to the same codewords within an image.
This relation is represented as
−→
r
m,n
= (d
m,n
,θ
m,n
)
between m
th
and n
th
keypoints ( f
m
and f
n
), where
d
m,n
= ||
−→
r
m,n
|| and θ
m,n
is the orientation w.r.t. the
x-axis of the image plane i.e.
d
m,n
= || f
loc
m
− f
loc
n
||,∀ f
m
, f
n
∈ S
k
and n > m
θ
m,n
=
acos
−→
r
m,n
·
−→
x
k
−→
r
m,n
k
, if (
−→
r
m,n
·
−→
y ) > 0
π − acos
−→
r
m,n
·
−→
x
k
−→
r
m,n
k
(3)
where
−→
x and
−→
y are the orthogonal unit vectors defin-
ing the image plane. We extract all possible pairwise
relations from all the subsets S
1...K
.
Finally, the magnitude d = {d
m,n
} of the spa-
tial relation is described with R possible codewords
β
1
... β
R
using a K-means clustering algorithm. Each
element in d is assigned to the nearest codeword us-
ing (2). The codewords in this codebook are sorted
i.e. β
1
< β
2
< . .. < β
R
because we apply the smooth-
ing over the histogram bins which represent the dis-
tribution of spatial relations. We discuss this further
in the next section while generating our histogram of
oriented pairwise relations.
3.1 Histogram of oriented pairwise
relations (HOPR)
In this section, we explain the generation of his-
tograms of pairwise relations (HOPR) from the ex-
tracted relations between all possible pairs of key-
points assigned with the same codewords. In our
representation, the average distance between visual
words in an image is represented with R possible
codewords which are learned from the training set.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
24

𝛽
1
𝛽
2
𝛽
3
𝛽
4
𝑝
1
𝑝
2
𝜃
𝑟
𝜃 = | 𝜃
1
− 𝜃
2
|
𝑝
1
𝑝
2
𝑝
3
𝑝
4
𝜃
1
𝜃
2
𝜃
𝑟
𝑟
′
𝑝
1
𝑝
2
𝑝
3
𝜃
1
𝜃
2
𝜃
𝑟
′
𝑟
𝑟
𝑟
′
𝜃
(a) (b) (c) (d) (e) (f)
Figure 2: (a) Assigned codewords α
1
...α
K
to the filtered keypoints in an image, (b) pairwise relationship feature
−→
r for
all possible pairs (2
nd
order) of keypoints assigned with the same codewords, (c) creation of histogram of oriented pairwise
relations (HOPR) using 8-bin orientations (unsigned) and codebook size of 4 i.e. β
1
...β
4
for ||
−→
r ||, (d) relationship features
for 3
rd
order, (e) relationship features for 4
th
order and (f) HOPR for relationship features for 3
rd
and 4
th
order.
A similar approach is proposed by Savarese et al.
to represent these relationships using the correlogram
which is a function of kernel radius (Savarese et al.,
2006). Our method is different from the above-
mentioned approach as we characterise the spatio-
temporal distribution of keypoints associated with the
same visual words. The relationships between the
different visual words can be extracted using higher
order spatial features. For example, 4
th
order rela-
tionship features (Fig. 2e) can be used to represent
the spatial relationships between two different visual
words, where pairs (p
1
, p
2
) ∈ S
i
, (p
3
, p
4
) ∈ S
j
and
i 6= j. The features originating from local keypoints
(bag-of-visual words) are called 1
st
order features.
Similarly, the features that encode spatial relation-
ships between a set of two, three or N keypoints are
called as 2
nd
, 3
rd
, and N
th
order features, respectively
(Liu et al., 2008). These are analogous to N-grams
used in statistical language modelling.
Fig. 2 shows our systematic approach for extract-
ing 2
nd
, 3
rd
and 4
th
order relationship features. Fig.
2a shows the distribution of keypoints over an image.
These keypoints are filtered based on their strength f
st
(step 1) and assigned respective codewords α
1
... α
k
(step 2). Keypoints with identical color are assigned
with the same codewords. Fig. 2b represents the ex-
traction of relationships between pairs of keypoints
having the same codewords. Each relationship r is
represented with a distance and angle pair (d,θ). The
distance d is assigned with the corresponding dis-
tance codewords β
1
... β
R
and is the last step of our
extraction process. The HOPR for the 2
nd
order re-
lationships features is shown in Fig. 2c and its di-
mension is O × R. O represents the number of ori-
entation bins and R describes the pairwise distance
bins i.e. the distance codebook β
1
... β
R
(in Fig. 2c,
O = 8 and R = 4). One HOPR per descriptor code-
words α
1
... α
K
per frame is generated. Our approach
considers the contribution from the adjacent bins be-
fore normalising the HOPR. These contributions are
assigned a fixed weight of 0.6 for the current bin and
0.2 for the previous and following bins. The pro-
cess is essentially a smoothing of the HOPR with pre-
defined 1-D centered filter kernels of [0.2,0.6, 0.2]
and [0.2, 0.6,0.2]
T
. Due to this, the distance code-
words β
1
< β
2
< . .. < β
R
are sorted as mentioned
before. We use the L2-norm for normalising the HO-
PRs. The normalised HOPR from each descriptor
codeword α
1
... α
K
is concatenated to produce a fi-
nal 2
nd
order relationships feature vector that consists
of O×R×K elements, and will be used by a classifier
for activity recognition.
Fig. 2d depicts the extraction of 3
rd
order rela-
tionship features using a sets of three keypoints. In
this setting, there are two pairwise relationships r and
r
0
with keypoint p
1
appearing in both the relations
(junction keypoint). We consider all possible con-
figurations consisting of these three keypoints i.e. in
the other two configurations p
2
and p
3
will be the re-
spective junction point. During the computation of
the 2
nd
order relationship features, we have already
extracted the distance angle pair (d, θ
1
) and (d
0
,θ
2
),
and assigned distance codeword β
1
... β
R
for the re-
spective r and r
0
relationships. While generating the
HOPR for the 3
rd
order relationship features, the rel-
ative angle θ = ||θ
1
− θ
2
|| between the relationships r
and r
0
is used for orientation bins O and their respec-
tive pairwise distance for the distance codewords bins
R. Fig. 2f shows the HOPR for 3
rd
order relation-
ship features with dimension of O × R × R. As in the
2
nd
order HOPR, the same smoothing and normalisa-
tion steps are applied and the (smoothed) HOPR from
each descriptor codeword is concatenated to represent
the final 3
rd
order relationship feature vector that con-
sists of O × R × R × K elements.
Similarly, we extract the HOPR for the 4
th
order
relationship feature set as depicted in Fig. 2e. In
this case, there is no junction keypoint as in the 3
rd
order HOPR (Fig. 2d). However, if the relationships
r and r
0
are not parallel then there is a point in the
image plane where these relationships are joined.
The extraction process and the dimension of this
HOPR is the same as in the 3
rd
order HOPR. It
is worth mentioning that although the order of the
EgocentricActivityRecognitionusingHistogramsofOrientedPairwiseRelations
25
𝑙𝑒𝑓𝑡 − 𝑡𝑜𝑝
𝑙𝑒𝑓𝑡 − 𝑡𝑜𝑢𝑐
𝑙𝑒𝑓𝑡 − 𝑏𝑜𝑡𝑡𝑜𝑚 𝑡𝑜𝑢𝑐 − 𝑏𝑜𝑡𝑡𝑜𝑚 𝑟𝑖𝑔𝑡 − 𝑏𝑜𝑡𝑡𝑜𝑚
𝑟𝑖𝑔𝑡 − 𝑡𝑜𝑢𝑐
𝑟𝑖𝑔𝑡 − 𝑡𝑜𝑝 𝑡𝑜𝑢𝑐 − 𝑡𝑜𝑝
𝑡𝑜𝑢𝑐 − 𝑡𝑜𝑢𝑐
𝑟
𝑝
1
𝑝
2
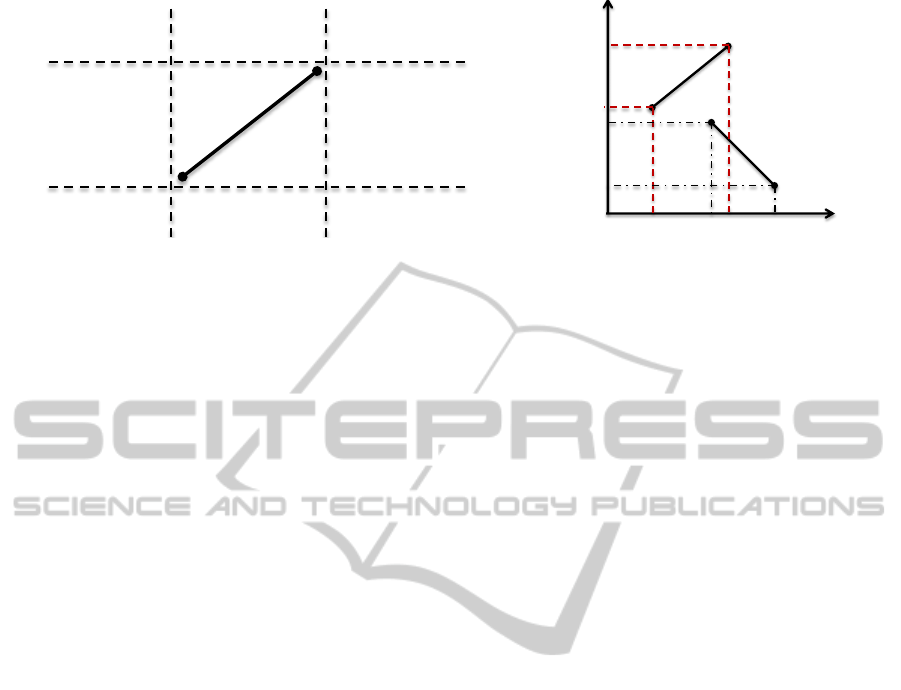
Figure 3: (a) Simplified RA relations in the image plane (left), (b) example projection of pairwise relationships in the image
co-ordinates (right) - in this case the relationship is touch-top.
relationship feature set is increased from 3 to 4, the
size of the HOPR descriptor is the same. In this
work, we limit ourselves up to 4
th
order relationship
features. So far, our HOPR encodes the distance d
between the positions f
loc
of keypoints and their
orientations θ w.r.t. the image plane. However, one
further piece of important information is the spatial
alignment of the relationships r w.r.t. r
0
can be used
for further discriminating the activity pattern. We
include this information in our HOPR representation
as it encapsulates the relation between a pair of
pairwise relations. We incorporate this information
by simplifying Allen’s temporal relations (Allen,
1983). We incorporate this information by a coars-
ened version of the rectangle algebra (RA) (Balbiani
et al., 1999) which is a cross product of the Allen
interval algebra (IA). Whereas the IA has 13 jointly
exhaustive and pairwise disjoint (JEPD) relations,
the RA at 13×13 = 169. By collapsing be f ore and
meets to a single relation (and correspondingly their
inverses) and all the remaining nine relations o, oi, s,
si, f, fi, d, c then we obtain a calculus with 3 JEPD
relations in the 1D case and with 9 JEPD relations in
the 2D case which has been called DIR9 (Liu et al.,
2009b); originally DIR9 was conceived as a calculus
for the bounding rectangles planar regions rather than
line segments, but it is clear that once axis-aligned
bounding rectangles have been computed the two
cases are identical. The calculus with our names
for the relations is depicted in Fig. 3. There are 3
x-relations (left, right and touch) for the x-axis and
another 3 y-relations (top, bottom and touch) for the
y-axis of the image plane. A total combination of
9 possible relations are extracted (Fig. 3). These
relations are extracted using the positions f
loc
of the
keypoints in the image plane. The spatial alignment
between a pair of pairwise relationships r (keypoints
p
1
and p
2
) and r
0
(keypoints p
3
and p
4
) is computed
as:
le f t : p
1,x
< p
3,x
∧ p
1,x
< p
4,x
∧ p
2,x
< p
3,x
∧ p
2,x
<
p
4,x
, right : p
1,x
> p
3,x
∧ p
1,x
> p
4,x
∧ p
2,x
>
p
3,x
∧ p
2,x
> p
4,x
and touch : ¬right ∧ ¬le f t
top : p
1,y
< p
3,y
∧ p
1,y
< p
4,y
∧ p
2,y
< p
3,y
∧ p
2,y
<
p
4,y
, bottom : p
1,y
> p
3,y
∧ p
1,y
> p
4,y
∧ p
2,y
>
p
3,y
∧ p
2,y
> p
4,y
, and touch : ¬top ∧ ¬bottom
An example of the process of extracting such
relations (touch − top) using pairwise relationships
r and r
0
is shown in Fig. 3b. For convenience, we
represent these relations as x-relation followed by
y-relation e.g. for the spatial alignment of touch-top,
the projection of the pairwise relationships r and r
0
on the x-axis are touched. Whereas on the y-axis,
the projection of the relationship r is on the top of
the relationship r
0
. For a given order of relationship
feature sets i.e. 2
nd
,3
rd
or 4
th
, we have already ex-
tracted all the involved pairwise relations r between
all possible pairs of keypoints assigned with the same
descriptor codeword (step 3). Let R = {r} be a set
containing all pairwise relations r for a given order
of relationships feature set in the image plane. The
spatial alignment is computed by considering all
possible pair of relations (r
i
,r
j
) ∈ R ,i ≥ j within the
set R . The relative orientation θ = ||θ
i
−θ
j
|| between
the pair (r
i
,r
j
) is used for the orientation bin O of the
HOPR. The relative spatial alignment (9 relations)
between the pair (r
i
,r
j
) is then added to the extracted
HOPR. The final dimension of the HOPR for the
2
nd
order relationships feature is O × (R + 9) × K.
Similarly, for the 3
rd
order and above, the dimension
of the HOPR is fixed and is of O × (R × R + 9) × K.
This is due to the fact that from the 3
rd
order and
above, we use the compute the relationships between
a pair of lines as mentioned earlier and for N
th
order
relationship features, the respective dimension is
O × (R
N−1
+ 9) × K.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
26

Table 1: Framewise performance comparison for the experiment one-vs-rest-subject (Leeds dataset without video stabilisa-
tion).
H
1
H
2
H
3
H
4
ˆ
H
2
- O=6 O=8 O=6 O=8 O=6 O=8 O=6
s
1
22.4 26.6 27.4 24.4 24.6 21.2 22.2 30.9
s
2
25.4 34.5 35.1 32.8 33.7 24.5 25.4 41.2
s
3
30.0 36.2 38.3 34.7 35.5 31.3 32.0 40.3
s
4
28.8 38.6 39.8 33.0 33.1 29.2 29.9 36.1
s
5
29.0 29.8 30.3 27.6 27.9 25.2 25.2 31.4
Avg. 27.1 33.1 34.2 30.5 31.0 26.3 26.9 36.0
3.2 Learning and Inference
We use a standard Support Vector Machine (SVM)
to solve our multi-class classification problem in a
supervised fashion. Every frame in a video is pro-
cessed and the corresponding relationships feature
vector HOPR is extracted and is used by the SVM
for training and prediction. The activity label for
each frame is provided by manual annotation. We use
the χ
2
-kernel which is given by k(x,y) = 2(xy)/x + y
and is named after the corresponding additive squared
metric D
2
(x,y) = χ
2
(x,y) which is a χ
2
distance be-
tween HOPR x and y. The χ
2
-kernel performs bet-
ter than other additive kernels such as intersection
and Hellinger’s for histogram based classifications
(Vedaldi and Zisserman, 2010). Due to the large di-
mensionality of the HoPR, we use the linear approxi-
mation of the χ
2
-kernel in order to reduce the compu-
tational complexity which is one of the most impor-
tant requirement for the real-time prediction of on-
going activity. This linear approximation is presented
in (Vedaldi and Zisserman, 2010). We use the order
N = 2 for the approximation i.e. if L is the dimen-
sion of the HOPR then after approximation the final
dimension will be L × (2N + 1). We use this approx-
imation as an input feature vector for the linear SVM
for the classification of activities (Fan et al., 2008).
4 EXPERIMENTS
In order to validate our novel representation of pair-
wise relationships using Histogram of Oriented Pair-
wise Relationships (HOPR), we use two publicly
available egocentric datasets: 1) GTEA (GeorgiaTech
Egocentric Activities) dataset consisting of kitchen
activities (Fathi et al., 2011b) and 2) Leeds egocentric
dataset (‘labelling and packaging bottles’) for manip-
ulative tasks (Behera et al., 2012b). All evaluations
are presented as a framewise classification accuracy.
For the baseline evaluation, we use the standard
approach of a bag-of-visual words i.e. 1
st
order fea-
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Background
Pick and put bottle
Stick label
Pick and put box
Remove cover
Put bottle inside box
Take and put cover
Write address
Take and put tape dispenser
Seal the box with sticky tape
Baseline
H2 Interframe
Figure 4: Action recognition results for Leeds dataset (Be-
hera et al., 2012b) are compared with the baseline approach:
SURF (Bay et al., 2006) (green) 27.1% and our approach
(yellow) 36.0%.
ture H
1
. In our experiment, we use SURF (Bay et al.,
2006) feature descriptors as visual features. There is
no specific reason for choosing SURF instead of SIFT
(Lowe, 2004). We found that SURF is computation-
ally less expensive than SIFT and prefer not to use
STIP (Laptev and Lindeberg, 2003) due to the fact
that the baseline performance of bag-of-visual word
using STIP (14.4%) performed less well in compar-
ison to SIFT (29.1%) on the GTEA dataset (Fathi
et al., 2011a). It is worth to mention that the ex-
traction of STIP features require more than a frame.
In our baseline evaluation, we use a χ
2
-kernel with-
out any approximations and the size of the descriptor
codebook is varied from 20 to 1000. We follow the
same experimental setup i.e. ‘leave-one-out’ subject
cross-validations presented in (Behera et al., 2012b;
Fathi et al., 2011a). In the Leeds dataset, there are
5 subjects and a total of 26 video sequences having
9 different activities, whereas in the GTEA dataset,
there are 4 subjects, 28 sequences and 10 verbs. The
EgocentricActivityRecognitionusingHistogramsofOrientedPairwiseRelations
27

Table 2: Framewise performance comparison for the experiment one-vs-rest-subject (GETA dataset without video stabilisa-
tion).
H
1
H
2
H
3
H
4
ˆ
H
2
- O=6 O=8 O=6 O=8 O=6 O=8 O=6 O=8
s
1
24.8 27.7 27.4 28.2 28.1 26.0 26.3 30.3 30.1
s
2
29.4 33.9 33.8 33.0 33.2 29.8 30.0 37.5 37.1
s
3
32.3 35.6 36.0 33.6 35.2 31.9 32.1 40.0 40.8
s
4
28.6 32.9 32.9 32.6 33.1 28.5 28.9 37.5 37.8
Avg. 28.8 32.5 32.5 31.8 32.4 29.1 29.3 36.3 36.5
Table 3: Framewise performance comparison for the experiment one-vs-rest-subject (GETA dataset with video stabilisation).
H
1
H
2
H
3
H
4
ˆ
H
2
- O=6 O=8 O=6 O=8 O=6 O=8 O=6 O=8
s
1
26.3 27.6 27.8 27.3 27.7 27.4 27.7 29.1 29.1
s
2
33.1 33.8 34.3 32.4 32.4 31.0 31.6 36.4 36.9
s
3
28.8 33.5 34.1 30.5 31.2 28.7 29.0 35.1 36.1
s
4
29.1 30.5 30.9 29.6 30.2 29.8 30.5 35.4 35.5
Avg 29.3 31.4 31.8 29.9 30.4 29.2 29.7 34.0 34.4
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Pick
Open
Scoop
Close
Pour
Stir
Background
Spread
Put
Fold
Dip
Baseline
H2 Interframe
Figure 5: (a) Average action verb recognition results for
GTEA datasets (Fathi et al., 2011b) over ‘leave-one-out’
subject, are compared with baseline approach: SURF (Bay
et al., 2006) (green) 28.8% and our approach (yellow)
36.5% (left).
Leeds dataset does not provide any video stabilisation
and the framewise recognition performance is pre-
sented in Table 1. We run the experiments on both
the stabilized and unstabilised version of the GTEA
datasets and the performance is provided in Table 2
and 3, respectively. The last row of all the Tables
provides the average performance of ‘leave-one-out’
subject cross-validation.
The HOPR representation of the order 2
nd
, 3
rd
and
4
th
is represented using H
2
, H
3
and H
4
, respectively.
The extraction procedures for these histograms is ex-
plained in section 3.1. For this experiment, we have
computed the HOPR for 2
nd
order features sets be-
tween frames and is symbolised as
ˆ
H
2
. While com-
puting
ˆ
H
2
, the current frame is compared with the
previous 3 frames with a gap of 0.25 seconds be-
tween two consecutive frames. For this experiment,
we keep the codebook size of 20 for visual words and
a pairwise distance codebook size of 8. We compare
the performance using two different orientations for
HOPR i.e. O = 6 and O = 8.
From the performance tables of both the dataset
(Table 1-3), it is evident that the performance of our
representation i.e. HOPR is better than that of the
bag-of-visual words approach. It is note-worthy that
in the baseline, we use the full χ
2
-kernel without any
linear approximation and the best performance is se-
lected using the varying size of the visual codebook.
In both the datasets, the HOPR
ˆ
H
2
gives best perfor-
mance. For the GTEA dataset, it is 36.5% and 34.4%
without using stabilisation and with stabilisation, re-
spectively. For the Leeds it is 36% (without using
stabilisation).
The other valuable observation in the GTEA
dataset is that by using video stabilisation the av-
erage baseline performance increased from 28.8%
to 29.3% whearas the performance only decreases
slightly when using the HOPR. This provides evi-
dence for our HOPR representation for the recogni-
tion of egocentric activities. This also explains the
robustness of our pairwise relational structure to the
uncontrolled movement of cameras in an egocentric
setup.
In both the datasets O = 8 orientation bins gives
slightly better (0.1 % - 0.6 %) performance than O =
6. The 2
nd
order relationship features (H
2
) encodes
the spatial distribution and is more sparse than the 1
st
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
28

order features (bag-of-visual words i.e. H
1
). There-
fore, the performance of the 2
nd
order HOPR is better
than the bag-of-visual words. However, when we in-
crease the relationships feature order to 3 or 4, the
performance decreases. This can be explained by the
fact that 3
rd
and 4
th
order features are more sparse
than 2
nd
order features and hence, statistically less re-
liable.
5 CONCLUSIONS AND FUTURE
WORKS
We present a novel approach to egocentric video ac-
tivity representation based on the relationships be-
tween visual words. These pairwise relations are
encoded using Histogram of Oriented Pairwise Re-
lations (HOPR). The movement and interaction be-
tween objects and hands are captured by observing
the spatial relationships between features in video
frames. This representation does not require the de-
tection of objects or hands in comparison to other
common approaches. In addition, it can be used for
real-time activity detection which requires the recog-
nition of partial observations i.e. single frame to
few frames. In this work using egocentric data, we
show that by encoding the spatiotemporal relation-
ships between local features in activity representa-
tions improves performance over state-of-the-art ac-
tivity representation approaches such as the bag-of-
visual words. We would like to further investigate on
the hierarchical relationships structure using local vi-
sual features.
ACKNOWLEDGEMENTS
This research work is funded by the EU FP7-
ICT-248290 (ICT Cognitive Systems and Robotics)
grant COGNITO (www.ict-cognito.org), FP7-ICT-
287752 grant RACE (http://project-race.eu/) and FP7-
ICT-600623 grant STRANDS (http://www.strands-
project.eu/).
REFERENCES
Aggarwal, J. K. and Ryoo, M. S. (2011). Human activity
analysis: A review. ACM Comput. Surv., 43(3):1–16.
Aghazadeh, O., Sullivan, J., and Carlsson, S. (2011). Nov-
elty detection from an ego-centric perspective. In
CVPR, pages 3297–3304.
Allen, J. F. (1983). Maintaining knowledge about temporal
intervals. Commun. ACM, 26(11):832–843.
Balbiani, P., Condotta, J.-F., and del Cerro, L. F. (1999).
A new tractable subclass of the rectangle algebra. In
Proceedings of the 16th International Joint Confer-
ence on Artificial Intelligence (IJCAI), pages 442–
447.
Bay, H., Tuytelaars, T., and Gool, L. V. (2006). SURF:
Speeded up robust features. In ECCV, pages 404–417.
Behera, A., Cohn, A. G., and Hogg, D. C. (2012a). Work-
flow activity monitoring using dynamics of pair-wise
qualitative spatial relations. In MMM, pages 196–209.
Behera, A., Hogg, D. C., and Cohn, A. G. (2012b). Egocen-
tric activity monitoring and recovery. In ACCV, pages
519–532.
Blank, M., Gorelick, L., Shechtman, E., Irani, M., and
Basri, R. (2005). Actions as space-time shapes. In
ICCV, pages 1395–1402.
Carneiro, G. and Lowe, D. (2006). Sparse flexible models
of local features. In ECCV, pages 29–43.
Crandall, D. J. and Huttenlocher, D. P. (2006). Weakly su-
pervised learning of part-based spatial models for vi-
sual object recognition. In ECCV (1), pages 16–29.
Deselaers, T. and Ferrari, V. (2010). Global and efficient
self-similarity for object classification and detection.
In CVPR, pages 1633–1640.
Doll
´
ar, P., Rabaud, V., Cottrell, G., and Belongie, S. (2005).
Behavior recognition via sparse spatio-temporal fea-
tures. In Visual Surveillance and Performance Eval-
uation of Tracking and Surveillance, 2005. 2nd Joint
IEEE International Workshop on, pages 65–72.
Fan, R.-E., Chang, K.-W., Hsieh, C.-J., Wang, X.-R., and
Lin, C.-J. (2008). LIBLINEAR: A library for large
linear classification. Journal of Machine Learning Re-
search, 9:1871–1874.
Fathi, A., Farhadi, A., and Rehg, J. M. (2011a). Under-
standing egocentric activities. In ICCV, pages 407–
414.
Fathi, A., Ren, X., and Rehg, J. M. (2011b). Learning to
recognize objects in egocentric activities. In CVPR,
pages 3281–3288.
Gilbert, A., Illingworth, J., and Bowden, R. (2009). Fast
realistic multi-action recognition using mined dense
spatio-temporal features. In ICCV, pages 925–931.
Gupta, A. and Davis, L. S. (2007). Objects in action: An ap-
proach for combining action understanding and object
perception. In CVPR, pages 1–8.
Kitani, K. M., Okabe, T., Sato, Y., and Sugimoto, A. (2011).
Fast unsupervised ego-action learning for first-person
sports videos. In CVPR, pages 3241–3248.
Kuehne, H., Jhuang, H., Garrote, E., Poggio, T., and Serre,
T. (2011). HMDB: A large video database for human
motion recognition. In ICCV, pages 2556–2563.
Laptev, I. and Lindeberg, T. (2003). Space-time interest
points. In ICCV, pages 432–439.
Laptev, I., Marszalek, M., Schmid, C., and Rozenfeld,
B. (2008). Learning realistic human actions from
movies. In CVPR, pages 1–8.
Liu, D., Hua, G., Viola, P. A., and Chen, T. (2008). Inte-
grated feature selection and higher-order spatial fea-
ture extraction for object categorization. In CVPR,
pages 1–8.
EgocentricActivityRecognitionusingHistogramsofOrientedPairwiseRelations
29

Liu, J., Luo, J., and Shah, M. (2009a). Recognizing realistic
actions from videos “in the wild”. In CVPR, pages
1996–2003.
Liu, W., Li, S., and Renz, J. (2009b). Combining rcc-8 with
qualitative direction calculi: Algorithms and complex-
ity. In Proceedings of the 21st International Joint
Conference on Artificial Intelligence (IJCAI), pages
854–859.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. International Journal of Com-
puter Vision, 60(2):91–110.
Matikainen, P., Hebert, M., and Sukthankar, R. (2010).
Representing pairwise spatial and temporal relations
for action recognition. In ECCV (1), pages 508–521.
Moeslund, T. B., Hilton, A., and Kr
¨
uger, V. (2006). A sur-
vey of advances in vision-based human motion cap-
ture and analysis. Computer Vision and Image Under-
standing, 104(2-3):90–126.
Niebles, J. C. and Li, F.-F. (2007). A hierarchical model of
shape and appearance for human action classification.
In CVPR, pages 1–8.
Ryoo, M. S. and Aggarwal, J. K. (2009). Spatio-temporal
relationship match: Video structure comparison for
recognition of complex human activities. In ICCV,
pages 1593–1600.
Savarese, S., Winn, J. M., and Criminisi, A. (2006). Dis-
criminative object class models of appearance and
shape by correlations. In CVPR (2), pages 2033–2040.
Schuldt, C., Laptev, I., and Caputo, B. (2004). Recogniz-
ing human actions: A local SVM approach. In ICPR,
pages 32–36.
Shechtman, E. and Irani, M. (2007). Matching local self-
similarities across images and videos. In CVPR.
Starner, T. and Pentland, A. (1995). Real-time American
sign language recognition from video using hidden
Markov models. In Proc. of Int’l Symposium on Com-
puter Vision, pages 265 – 270.
Sun, J., Wu, X., Yan, S., Cheong, L. F., Chua, T.-S., and Li,
J. (2009). Hierarchical spatio-temporal context mod-
eling for action recognition. In CVPR, pages 2004–
2011.
Turaga, P. K., Chellappa, R., Subrahmanian, V. S., and
Udrea, O. (2008). Machine recognition of human ac-
tivities: A survey. IEEE Trans. Circuits Syst. Video
Techn., 18(11):1473–1488.
Vedaldi, A. and Zisserman, A. (2010). Efficient additive
kernels via explicit feature maps. In CVPR, pages
3539–3546.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
30
